
Abstract
We derive optimal and asymptotically exact a posteriori error estimates for the approximation of the eigenfunction of the Laplace eigenvalue problem. To do so, we combine two results from the literature. First, we use the hypercircle techniques developed for mixed eigenvalue approximations with Raviart-Thomas finite elements. In addition, we use the post-processings introduced for the eigenvalue and eigenfunction based on mixed approximations with the Brezzi-Douglas-Marini finite element. To combine these approaches, we define a novel additional local post-processing for the fluxes that appropriately modifies the divergence without compromising the approximation properties. Consequently, the new flux can be used to derive optimal and asymptotically exact upper bounds for the eigenfunction, and optimal upper bounds for the corresponding eigenvalue. Numerical examples validate the theory and motivate the use of an adaptive mesh refinement.
Similar content being viewed by others

Avoid common mistakes on your manuscript.
1 Introduction
In many examples from physics to industrial applications, the solution of eigenvalue problems plays an essential role. Similar as for standard source problems, the finite element method seems to be a very promising method to discretize these problems due to its flexibility and good approximation properties. Numerous works deal with the analysis concerning stability, convergence properties and a priori error estimates, see [3, 9].
Since in general one can not assume high regularity of the eigenfunctions on arbitrary domains [27], the requirement for an adaptive mesh refinement strategy is obvious. Central to this approach is the derivation of an efficient and reliable a posteriori error estimator, as already developed for finite element methods in general [1, 35], and for eigenvalue problems in particular in [18].
In this work we consider the Laplace eigenvalue problem and approximate it using a mixed method. Several examples can be found in the literature using this approach, see [10, 17, 24, 26, 30], where adaptivity by means of residual error estimators (and using an \(H({\text {div}}) \times L^2\)-norm analysis) is discussed. We particularly want to refer to [14] where a unified framework for (guaranteed) a posteriori bounds (using a proper discrete \(H^1\)-energy norm) and a detailed overview of the literature is presented. A fundamental observation when using a mixed method is that it gives access to the hypercircle theory, see [28, 32], eventually leading to asymptotically exact upper bounds and local efficiency. However, unlike for standard source problems, see [13, 19, 23, 25, 36], a more profound approach is needed since the orthogonality of the corresponding errors is no longer exactly satisfied.
For eigenvalue problems this was first introduced in the work [6], by means of the Raviart-Thomas finite element. To discuss details, note that we have
where \(\lambda , u, \sigma \) are the exact eigenvalue, eigenfunction and its gradient, \(\lambda _h, u_h, \sigma _h\) are the corresponding approximations and \(u_h^{**}\) denotes some \(H^1\)-conforming post-processed function of \(u_h\). The first term on the right-hand side of (1) is computable and can therefore be used to define an a posteriori estimator \(\eta \). The astonishing observation in [6] was that in the case of an approximation using the Raviart-Thomas finite element, the second term \( 2(\sigma _h - \sigma , \nabla (u - u_h^{**}) )\) converges with higher order. Consequently, \(\eta \) is an asymptotically exact upper bound for the errors on the left-hand side of (1).
The question was whether the same ideas can be applied when using the Brezzi-Douglas-Marini (BDM) finite element instead. Surprisingly, as observed in [5] this is not the case. However, in [4] (using ideas from [21]) the authors were able to derive optimal upper bounds but with unknown constants (in contrast to the asymptotic bounds provided by \(\eta \) above).
The goal of this work is to derive asymptotically exact upper bounds (for the eigenfunction) as in [6] when using the BDM finite element method. For this we use the post-processing techniques for the eigenvalue and the eigenfunction as in [4], and consider modifications of the approaches from [6]. We introduce an additional (local) post-processing for the flux variable \(\sigma _h\), where we correct its divergence to fit the additional term in (1), which consequently converges again with higher order. Note, that the proposed method of this work is defined for all polynomial orders \(k \ge 1\), but the convergence results are only improved (compared to the Raviart-Thomas finite element) for \(k \ge 1\), see Remark 2.
The rest of the paper is organized as follows. Section 3 discusses the problem setting and its approximation. In Sect. 4 we present the local post-processing technique for the eigenfunction and the eigenvalue. The main results are then discussed in Sect. 5. While we first recapture the standard a posteriori error analysis based on (1) and reveal its breakdown due to a slow convergence of the additional terms, we then introduce the novel post-processing of the flux and derive the asymptotically exact upper bound. In the last Sect. 6 we present two numerical examples to validate our findings. The appendix, see Sect. 1, considers some additional results needed in the analysis.
2 Notation
We use the established notation for Sobolev spaces, i.e. \(L^2(\varOmega ), H^1(\varOmega )\) and \(H({\text {div}}, \varOmega )\) for a given domain \(\varOmega \). An additional zero subscript (for the latter two) indicates a vanishing trace. Further \(H^1(\varOmega , \mathbb {R}^d)\) (and similarly for other spaces) denotes a corresponding vector-valued version with d components. For \(\omega \subset \varOmega \) we use \((\cdot , \cdot )_\omega \) and \(\Vert \cdot \Vert _{0,\omega }\) for the inner product and the norm on \(L^2(\omega )\), respectively, and \(\vert \cdot \vert _{s,\omega }\) as the standard Sobolev seminorm of order s. If \(\omega = \varOmega \) we omit the additional subscript. We write \(A \lesssim B\) when there is a positive constant C, that is independent of the mesh parameter h (see below) such that \(A \le C B\). Analogously we define \(A \gtrsim B\).
3 Problem setting
Let \(\varOmega \subset \mathbb {R}^d\) be a polygon or polyhedron for \(d = 2, 3\), respectively. We consider the mixed formulation of the Laplace eigenvalue problem with homogeneous Dirichlet boundary conditions, i.e. we want to find a \(\lambda \in \mathbb {R}, u \in L^2(\varOmega )\) and \(\sigma \in H({\text {div}}, \varOmega )\) such that
We approximate (2) by a mixed method using the \(\text {BDM}\) finite element for the approximation of \(\sigma \) and a piece-wise polynomial approximation of u. To this end let \({\mathcal {T}_h}\) be a regular triangulation of \(\varOmega \) into triangles and tetrahedrons in two and three dimensions, respectively. Let \(k \ge 1\) be a fixed integer (see Remark 2 for a comment regarding the lowest order case). We introduce the spaces
where \(\mathbb {P}^l(K)\) denotes the space of polynomials of order \(l \ge 0\) on K, and \(\mathbb {P}^l(K, \mathbb {R}^d)\) denotes the corresponding vector-valued version. An approximation of (2) then seeks \(\lambda _h \in \mathbb {R}\), \(u_h \in U_h\) and \(\sigma _h \in \varSigma _h\) such that
Review article [9] (for example) states that problem (3) defines a good approximation of the continuous eigenvalue problem (2) in the sense that it does not produce any spurious modes and that eigenfunctions are approximated with the proper multiplicity. The approximation results are summarized in the following. To this end let \(s > 1/2\) and let \((\lambda , u, \sigma )\) be a solution of the eigenvalue problem (2) with the regularity \(u \in H^{1 + s}(\varOmega )\) and \(\sigma \in H({\text {div}}, \varOmega ) \cap H^s(\varOmega , \mathbb {R}^d)\) (for the regularity results see [20, 22]). Then there exists a discrete solution of (3) such that (see [3, 9])
where \(r = \min \{s, k+1\}\) and \(r' = \min \{s, k+2\}\), and \(h=\max \limits _{K \in {\mathcal {T}_h}} h_K\) where \(h_K\) is the diameter of an element K. If s is big enough we have \(r' = r+1\). Above estimates follow from the abstract theory from [9, 17] and [30], and the approximation results of the source problem, see [10]. It is worth mentioning, that the constants in (4) are non-trivial as they depend, beside the discrete stability constants of (3), particularly on the spectrum of the associated solution operator of the continuous eigenvalue problem (2). In addition we have
where
Here \( {[\![ \cdot ] \!]}\) denotes the standard jump operator, \(\mathcal {F}_h\) the set of facets of the triangulation \({\mathcal {T}_h}\), and \(h_F\) the diameter of a facet \(F \in \mathcal {F}_h\). Note that above results demand a careful choice of the approximated eigenfunction \(u_h\) and the approximated gradient \(\sigma _h\). An example, well established in the literature, is given by a normalization such that \(\Vert u_h \Vert _0 = \Vert u \Vert _0 = 1\) and by choosing the sign \((u,u_h) > 0\). Note that this also fixes \(\sigma \) and \(\sigma _h\) by (2a) and (3a), respectively. For simplicity, we assume for the rest of this work that \(\lambda \) is a simple eigenvalue and that the above choice of sign and scaling of the continuous and the discrete eigenfunctions is applied. Further, for simplicity, we will call \((\lambda , u, \sigma )\) the solution of (2), keeping in mind that a different scaling and sign can be chosen.
Remark 1
The case of eigenvalues with a higher multiplicity demands more carefulness, particularly if an a posteriori analysis is considered. We particularly want to refer to [11] where the authors considered eigenvalue clusters using a mixed formulation. For the convergence of the adaptive scheme they used a residual based error estimator and provided a detailed analysis. An extension to estimators that are based on identity (1) is still open and is discussed in future works.
Remark 2
Although the schemes proposed in this work are computable also for the lowest order case \(k=0\), one does not observe any high-order convergence of the post processed variables defined later in the work. The reason for this is that the Aubin-Nitsche technique, needed in the analysis, can not be applied for this case.
4 Local post-processing for \(u_h\) and \(\lambda _h\)
For a sufficiently smooth solution, estimates (4) and (5) show that there is a gap of two between the order of convergence of \(\Vert \sigma - \sigma _h \Vert _0\) and \(\Vert u - u_h \Vert _{1,h}\). In [17] the following identity is proven
which, due to (4), gives the estimate (using \(r \le r'\))
We see that the order of convergence of \(\vert \lambda - \lambda _h \vert \) is dominated by the order of the \(L^2\)-error of the eigenfunction. The reduced convergence of \(u_h\) (compared to the \(L^2\)-error of \(\sigma _h\)) is well known for mixed methods and can be improved by means of a local post-processing, see [2, 34], and particularly for eigenfunctions in [15]. Consequently, using the ideas from [21], we can then also get an improved eigenvalue.
For a given integer \(l \ge 0\) let \(\varPi ^l\) denote the \(L^2\)-projection onto element-wise polynomials of order l. Consider the spaces
then we define \(u^*_h \in U_h^*\) by
For the discretization of the standard source problem (i.e. the Poisson problem), it is known that the kernel inclusion property \({\text {div}}\varSigma _h \subseteq U_h\) (see [10]) and commuting interpolation operators yield a super convergence property of the projected error \(\Vert \varPi ^k u - u_h \Vert _0\) given by \(\rho (h)\mathcal {O}(h^{r'})\). Here \(\rho (h)\) is a function that depends on the regularity of the problem and for which we have \(\rho (h) \rightarrow 0\) as \(h \rightarrow 0\). For convex domains we have \(\rho (h) = \mathcal {O}(h)\). This super convergence of the projected error is the fundamental ingredient to derive the enhanced approximation properties of \(u_h^*\).
Unfortunately the same technique, i.e. the one from the standard source problem, does not work for the eigenvalue problem and an improved convergence estimate of \(\Vert \varPi ^k u - u_h \Vert _0\) is more involved. This has been discussed for the lowest order case in [20], for a more general setting including eigenvalue clusters in [11], for Maxwell eigenvalue problems in [12] and for the Stokes problem for example in [21]. Unfortunately, these results are only presented using the full \(\Vert \cdot \Vert _{{\text {div}}}\)-norm (or the corresponding mixed norm) for \(\varSigma \) and \(\varSigma _h\). While such an estimate is applicable for an approximation of (3) using Raviart-Thomas finite elements, the \(\text {BDM}\) case is not covered since (4c) and (4b) show different convergence orders which would spoil the estimate. As the author is not aware of a detailed proof that can be found in the literature, it will be given in the appendix in Sect. 1. Note however, that these results are already used for example in [4] (without proof). The resulting super convergence reads as
which in combination with the techniques from [34], then yields the approximation properties (see also [29])
Since \(u_h^*\) is not \(H^1\)-conforming the final post-processing step consists of the application of an averaging operator \(I^a: U_h^* \rightarrow U_h^{**}\) often also called Oswald operator, see [31] and [16] for details on the approximation properties. We set \(u_h^{**}:= I^a(u_h^*)\) for which we have by (10)
We conclude this section by introducing a post-processing of the eigenvalue. As in [4, 21] we define
The following lemma was given in [21]. Since we need some intermediate steps in the sequel, we include the proof.
Lemma 1
Let \(s > 1/2\) and let \((\lambda , u, \sigma )\) be the solution of (2) with the regularity \(u \in H^{1 + s}(\varOmega )\) and \(\sigma \in H({\text {div}}, \varOmega ) \cap H^s(\varOmega , \mathbb {R}^d)\). Further let \(\Vert u_h^* \Vert _0 \ne 0\). There holds
where \(r = \min \{s,k+1\}\) and \(r' = \min \{s,k+2\}\).
Proof
Since \(\Vert u\Vert _0 = 1\) we have using that \({\text {div}}\varSigma _h \subseteq U_h\) and (8b)
Using \(\lambda _h^*\Vert u - u_h^* \Vert ^2_0 = \lambda _h^*(u,u) + \lambda _h^*(u_h^*,u_h^*) - 2 \lambda _h^*(u,u_h^*)\) we have in total
and thus again with \(\Vert u \Vert _0 = 1\) this gives
Since \(({\text {div}}\sigma _h + \lambda _h^* u_h^*, u_h^*) = 0\) (according to the definition of \(\lambda _h^*\)), the last term can be written as
By the Cauchy-Schwarz inequality we finally get
Thus, for h small enough, the last term can be moved to the left hand side, and we can conclude the proof using (10) and (4). \(\square \)
5 A posteriori analysis
In this section we provide an a posteriori error analysis and define an appropriate error estimator. We follow [6] where the authors derived an error estimator using the variables \(\sigma _h\) and \(u_h^{**}\). While this works for a mixed approximation of (4) using the Raviart-Thomas finite element of order k (as was done in [6]), this does not work for our setting. To discuss the problematic terms and to motivate our modification, we present more details in the following. Since \(\sigma = \nabla u\) we have
Using integration by parts, \(u_h^{**} \in H^1_0(\varOmega )\) and \(-{\text {div}}\sigma _h = \lambda _h u_h\), the last term can be written as
In total this gives the guaranteed upper bound
In [6] the first term on the right hand side is the (computable) proposed error estimator, whereas the second and third are high-order terms. Compared to our setting we can see the problem since
where for simplicity, i.e. to allow a simpler comparison, we assumed a smooth solution. Whereas the second term converges with an increased rate (compared to \(2k+4\)), the reduced convergence order of \(\Vert u - u_h\Vert _0\), see equation (4a), spoils the estimate of the last term. Note that the error of \(u_h\) appears in the estimates because we used the identity \(-{\text {div}}\sigma _h = \lambda _h u_h\) in the above proof.
To fix this problem we propose another post-processing. Whereas the first two post-processing routines were used to increase the convergence rate of the error of the eigenfunction and eigenvalue i.e. \(u_h^{*}\) (and \(u_h^{**}\)) and \(\lambda _h^*\), respectively, we now aim to construct a \(\sigma _h^*\) with a fixed divergence constraint rather than improving its approximation properties measured in the \(L^2\)-norm. To this end we define the space
The space \(\varSigma _h^*\) reads as a \(\text {BDM}\) space of order \(k+3\) with a reduced polynomial order of the normal traces. Note that other choices of \(\varSigma _h^*\) are possible, see Remark 3. The basic idea now is to find a \(\sigma _h^* \in \varSigma _h^*\) being as "close" as possible to \(\sigma _h\) (i.e. being a good approximation) such that the divergence is modified appropriately using the additional high-order normal-bubbles (i.e. functions with a zero normal component along the boundary of each element). Since these bubbles are defined locally, this can be done in an element-wise procedure. Now let \(\xi _h \in \varSigma _h^*\) be arbitrary. Proposition 2.3.1 in [10] shows that the following degrees of freedom (here applied to \(\xi _h\))
where \(\mathbb {H}^{k+3}(K):= \{l_h \in \mathbb {P}^{k+3}(K, \mathbb {R}^d): {\text {div}}l_h = 0, l_h\cdot n\vert _{\partial K} = 0\}\), are unisolvent. By that we can define the post processed flux \(\sigma ^*_h \in \varSigma _h^*\) by
Note that since \(\sigma _h\) is normal continuous, i.e. the normal trace coincides on a common facet of two neighboring elements, the boundary constraints (15a) of \(\sigma _h^*\) can be set locally on each element (boundary) separately. Further, since \(\sigma _h \cdot n\) and \(\sigma _h^* \cdot n \) have the same polynomial degree \(k+1\), the moments from (15a) result in \(\sigma _h \cdot n = \sigma ^*_h \cdot n\). In total this shows that one can solve for \(\sigma _h^*\) on each element independently, i.e. this can be done computationally very efficient. In Remark 4 we also make a comment on the choice of (15b).
Theorem 1
Let \(\sigma _h^* \in \varSigma _h^*\) be the function defined by (15), then there holds
Let \(s > 1/2\) and \(\sigma \in H({\text {div}}, \varOmega ) \cap H^s(\varOmega , \mathbb {R}^d)\) be the solution of the eigenvalue problem (2). There holds the a priori error estimate
where \(r' = \min \{s,k+2\}\) and \(r = \min \{s,k+1\}\).
Proof
We start with the proof of the divergence identity. Let \(K \in {\mathcal {T}_h}\) and \(q_h \in \mathbb {P}^{k+2}(K)\) be arbitrary, then we have
where the second step followed due to (15b) and the Gauss theorem. Using (15a) and (3b), the last integral can be written as
where we used (8b) in the last step. All together this gives
from which we conclude the proof as \({\text {div}}\sigma _h^* - \lambda _h u^*_h \in \mathbb {P}^{k+2}(K)\) and \(q_h\) was arbitrary.
Now let \(I^*_h\) be the canonical interpolation operator into \(\varSigma _h^*\) with respect to the moments (14), and let \(I_h\) be the interpolation operator into \(\varSigma _h\) which is defined using the same moments (14) but with \(q_h \in \mathbb {P}^{k}(K) / \mathbb {P}^{0}(K)\) and \(l_h \in \mathbb {H}^{k+1}(K)\) instead. First, the triangle inequality gives \( \Vert \sigma - \sigma _h^* \Vert _0 \le \Vert \sigma - I^*_h\sigma \Vert _0 + \Vert I^*_h\sigma - \sigma _h^* \Vert _0\). Since the first term can be bounded by the properties of \(I^*_h\), we continue with the latter which can be written as
By the definition of the interpolation operators and similar steps as above we have \(I_h(\sigma _h^*) = \sigma _h\), and thus the term most to the right simplifies to
We continue with the other term. For this let \(\psi ^{{\text {div}}}_i\) be the hierarchical dual basis functions of the highest order divergence moments from (14b) given by \(\int _K {\text {div}}(\cdot ) q_i {\text {dx}}\) with \(q_i \in \mathbb {P}^{k+2}(K) / \mathbb {P}^{k}(K)\). Similarly let \(\psi _i^{\mathbb {H}}\) be the hierarchical dual basis functions of the highest order vol moments from (14c) given by \(\int _K (\cdot ) \cdot l_i {\text {dx}}\) with \(l_i \in \mathbb {H}^{k+3}(K) / \mathbb {H}^{k+1}(K)\). An explicit construction of these basis functions can be found for example in [8, 37]. Also let \(N_{{\text {div}}}\) and \(N_\mathbb {H}\) be the corresponding index sets. Using (2b), (15b) and (15c), this then gives
which implies that (using that the norms of the \(q_i, l_i\) and \(\psi ^{{\text {div}}}_i,\psi ^{\mathbb {H}}_i\) are bounded)
Since \(\Vert u_h^*\Vert _0 \le \Vert u_h^* - u\Vert _0 + \Vert u \Vert _0\), we can conclude the proof by the approximation properties of \(I_h\) and \(I^*_h\) (see Proposition 2.5.1 in [10]), estimates (7) and (10) and by \(\rho (h) h^{r'} \le h^{r'}\) and \(h^{2r} \le h^{r'}\). \(\square \)
Remark 3
Instead of choosing \(\varSigma _h^*\) as above, one can for example also use the standard Raviart-Thomas space of order \(k+2\) denoted by \(RT^{k+2}\). Since \({\text {div}}RT^{k+2} = U_h^*\) it is again possible to set \(-{\text {div}}\sigma _h^* = \lambda _h u_h^*\) (using the appropriate degrees of freedom). However, since the normal trace of \(\sigma ^*_h\) is now in \(\mathbb {P}^{k+2}(F)\) on each facet \(F \in \mathcal {F}_h\), one has to be more careful defining the edge moments. Precisely, we would now set
where the projection has to be understood as the \(L^2\)-projection on the facets.
Remark 4
One might be curious why we do not use \(\lambda _h^*\) instead of \(\lambda _h\) in the definition of \({\text {div}}\sigma ^*_h\) in (15b). Indeed, as can be seen in the proof this is a crucial choice since we used in (16) that the mean value of the divergence is fixed by the constant normal moments (first equal sign) and thus coincides with \(\varPi ^0 (\lambda _h u_h)\) (third equal sign). Choosing \(\lambda _h^*\) in (15a) would then lead to a mismatch of the low-order and high-order parts of the divergence.
We are now in the position of defining the local error estimator on each element \(K \in {\mathcal {T}_h}\) by
and the corresponding global estimator by
Theorem 2
Let \((\lambda ,u,\sigma )\) be the solution of (2). Let \((\lambda _h,u_h,\sigma _h)\) be the solution of (4) and let \(u_h^{**}\) and \(\sigma _h^*\) be the post-processed solutions. There holds the reliability estimate
where \({\text {hot}}(h):= 2 \vert (\sigma _h^* - \sigma , \nabla (u-u_h^{**}))\vert \) with
is a high-order term compared to \(\mathcal {O}(h^{2r'})\) as \(h \rightarrow 0\). Further, there holds the efficiency
Proof
Following the same steps as at the beginning of this section we arrive at
For the last term we now have
Whereas the first term converges of order
we have for the second term
It remains to show that \({\text {hot}}(h) \lesssim \rho (h) (h^{2r + r'} + \rho (h)h^{2r'})\) is of higher order compared to \(h^{2r'}\). Due to the additional \(\rho (h)\) in the upper bound of \({\text {hot}}(h)\), we only have to show that \(2r' \le 2r + r'\). For the low regularity case, i.e. \(s = r = r'\), and the case of full regularity, i.e. \(r = k+1\) and \(r' = k + 2\), this follows immediately. For the case where \(r = k+1\) and \(r' = s\) with \(k+1< s < k+2\), we also have
from which we conclude the proof of the reliability.
The efficiency estimate follows by the triangle inequality and \(\sigma = \nabla u\). \(\square \)
Using the estimator from above we are now also able to derive an upper bound for \(\lambda _h^*\). To this end let
The last two terms from the estimator \(\eta _\lambda \) are needed to measure the difference between the quantities used in \(\eta \) and the functions used in the definition of \(\lambda _h^*\). Unfortunately the authors do not see how the definition of \(\lambda _h^*\) can be changed such that only \(\sigma _h^*\) and \(u_h^{**}\) are used, which would allow a direct estimate by \(\eta \).
Theorem 3
Let \((\lambda ,u,\sigma )\) be the solution of (2). Let \((\lambda _h,u_h,\sigma _h)\) the the solution of (4) and let \(u_h^{**}\) and \(\sigma _h^*\) be the post-processed solutions. There holds the estimate
where \(\widetilde{{\text {hot}}}(h):= \Vert u_h^* - u\Vert _0 \Vert u - u_h^{**}\Vert _0 + \Vert u - u_h^{**}\Vert ^2_0\) with
and \({\text {hot}}(h)\) are both higher order terms compared to \(\mathcal {O}(\rho (h)h^{r + r'} + h^{2r'})\) as \(h \rightarrow 0\).
Proof
Following (13) we have the equation
Note that the second term on the right side is already of higher order, thus we only consider the remaining terms. The idea is to modify the terms including \(\sigma _h\) such that we can use the results from the previous theorem. By the triangle inequality we have \(\Vert \sigma - \sigma _h \Vert _0 \le \Vert \sigma - \sigma ^*_h \Vert _0 + \Vert \sigma _h^* - \sigma _h \Vert _0\). Since the error \(\Vert \sigma _h^* - \sigma _h \Vert _0\) is computable and \(\Vert \sigma - \sigma ^*_h \Vert _0\) can be bounded by the estimator from the previous theorem, we are left with an estimate for the last term on the right hand side of (17).
In contrast to the proof of Lemma 1 we now add and subtract \(u_h^{**}\) (and not \(u_h^*\)) which gives
The last term is computable and will be used in the estimator. For the first one we have using that \(u_h^{**} \in H_0^1(\varOmega )\), \(\Vert u \Vert _0=1\) and integration by parts
The first term can be estimated as before, thus for h small enough we have
To show that \({\text {hot}}(h)\) and \(\widetilde{{\text {hot}}}(h)\) are of higher order compared to \(\mathcal {O}(\rho (h)h^{r + r'} + h^{2r'})\), one follows the same steps as in the proof of Theorem 2.
\(\square \)
6 Numerical examples
In this section we discuss some numerical examples to validate our theoretical findings. All methods were implemented in the Finite Element library Netgen/NGSolve, see www.ngsolve.org and [33].
6.1 Convergence on a unit square
The first example considers the unit square domain \(\varOmega = (0,1)^2\). The eigenfunction and the smallest eigenvalue of (2) is given by \(u = 2 \sin (2\pi x) \sin (2\pi y)\) and \(\lambda = 2 \pi ^2\), respectively. We start with an initial mesh with \(\vert {\mathcal {T}_h}\vert = 32\) elements and use a uniform refinement. Note that for simplicity we used a structured mesh for this example, thus we have \(h \sim (0.5 \vert {\mathcal {T}_h}\vert )^{-1/2}\). In Tables 1 and 2 we present several errors and their convergence rate (given in brackets) for different polynomial orders \(k = 1\) and \(k = 2\). Beside the errors we also plot the high-order term from Theorem 2, and the efficiencies
Since \(\varOmega \) is convex we have for this example that \(\rho (h) \sim h\), thus we expect the following convergence orders (for simplicity recalled here)
In accordance to the theory all errors converge with the optimal orders. Further the high-order term \({\text {hot}}(h)\) converges faster than the estimator \(\eta \) as predicted by Theorem 2. Note that this results in an efficiency \({\text {eff}}\) converging to one, i.e. the error estimator is asymptotically exact. Also the estimator for the error of the eigenvalue converges appropriately and shows a good efficiency \({\text {eff}}_\lambda \). The same conclusions can be made for \(k=2\), however, the error of the eigenvalues \(\lambda _h\) and \(\lambda _h^*\) converge so fast that they are too small and rounding errors dominate on the finest meshes. For the same reason we also do not present any numbers for \(\widetilde{{\text {hot}}}(h)\) since this term converges even faster resulting in very small numbers already on coarse meshes.
6.2 Adaptive refinement on the L-shape
For the second example we choose the L-shape domain \(\varOmega = (-1,1)^2 {\setminus } ([0,1] \times [-1,0])\) where the first eigenvalue reads as \(\lambda \approx 9.63972384402\), see [7]. In this example the corresponding eigenfunction is singular, thus we expect a suboptimal convergence on a uniform refined mesh. To this end we solve the problem using an adaptive mesh refinement. The refinement loop is defined as usual by
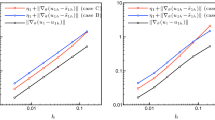
and is based on the local contributions \(\eta (K)\) as element-wise refinement indicators. In the marking step we mark an element if \(\eta (K) \ge \frac{1}{4} \max \limits _{K \in {\mathcal {T}_h}} \eta (K)\). The refinement routine then refines all marked elements plus further elements in a closure step to guarantee a regular triangulation. In Fig. 1 we present the error history of the post processed eigenvalue \(\lambda _h^*\), its estimator \(\eta _\lambda \) and the estimator for the eigenfunction error \(\eta \) for polynomial order \(k=2,3\). We can observe an optimal convergence \(\mathcal {O}(N^{-2(k+2)})\), \(\mathcal {O}(N^{-2(k+2)})\) and \(\mathcal {O}(N^{-(k+2)})\), for \(\vert \lambda - \lambda _h^*\vert \), \(\eta _\lambda \) and \(\eta \), respectively, where N denotes the number of degrees of freedom. Further \(\eta _\lambda \) shows a good efficiency.

Convergence history of the L-shape example using an adaptive refinement for \(k=2,3\)
Data availability
All datasets generated during the current study are available in the repository Dataset for plots and tables of a paper on asymptotically exact a posteriori error estimates for mixed Laplace eigenvalue problems which can be found at https://doi.org/10.5281/zenodo.6417423.
References
Ainsworth, M., Oden, J.T.: A unified approach to a posteriori error estimation using element residual methods. Numer. Math. 65(1), 23–50 (1993)
Arnold, D.N., Brezzi, F.: Mixed and nonconforming finite element methods: implementation, postprocessing and error estimates. RAIRO Modél. Math. Anal. Numér. 19(1), 7–32 (1985)
Babuška, I., Osborn, J.: Eigenvalue problems. In: Finite Element Methods (Part 1). Handbook of Numerical Analysis, vol. 2, pp. 641–787. Elsevier (1991). https://doi.org/10.1016/S1570-8659(05)80042-0
Bertrand, F., Boffi, D., Gedicke, J., Khan, A.: Some remarks on the a posteriori error analysis of the mixed laplace eigenvalue problem. In: 14th WCCM-ECCOMAS Congress (2021)
Bertrand, F., Boffi, D., Stenberg, R.: A posteriori error analysis for the mixed Laplace eigenvalue problem: investigations for the BDM-element. PAMM 19(1), e201900155 (2019). https://doi.org/10.1002/pamm.201900155
Bertrand, F., Boffi, D., Stenberg, R.: Asymptotically exact a posteriori error analysis for the mixed Laplace eigenvalue problem. Comput. Methods Appl. Math. 20(2), 215–225 (2020)
Betcke, T., Trefethen, L.N.: Reviving the method of particular solutions. SIAM Rev. 47(3), 469–491 (2005)
Beuchler, S., Pillwein, V., Zaglmayr, S.: Sparsity optimized high order finite element functions for H(div) on simplices. Numerische Mathematik 122(2), 197–225 (2012)
Boffi, D.: Finite element approximation of eigenvalue problems. Acta Numer. 19, 1–120 (2010)
Boffi, D., Brezzi, F., Fortin, M.: Mixed finite element methods and applications. Springer Series in Computational Mathematics, vol. 44, p. 685. Springer, Heidelberg (2013)
Boffi, D., Gallistl, D., Gardini, F., Gastaldi, L.: Optimal convergence of adaptive FEM for eigenvalue clusters in mixed form. Math. Comput. 86(307), 2213–2237 (2017)
Boffi, D., Gastaldi, L., Rodríguez, R., Šebestová, I.: A posteriori error estimates for Maxwell’s eigenvalue problem. J. Sci. Comput. 78(2), 1250–1271 (2019)
Braess, D., Schöberl, J.: Equilibrated residual error estimator for edge elements. Math. Comput. 77(262), 651–672 (2008)
Cancés, E., Dusson, G., Maday, Y., Stamm, B., Vohralík, M.: Guaranteed and robust a posteriori bounds for Laplace eigenvalues and eigenvectors: a unified framework. Numer. Math. 140(4), 1033–1079 (2018)
Cockburn, B., Gopalakrishnan, J., Li, F., Nguyen, N.-C., Peraire, J.: Hybridization and postprocessing techniques for mixed eigenfunctions. SIAM J. Numer. Anal. 48(3), 857–881 (2010)
Di Pietro, D.A., Ern, A.: Mathematical Aspects of Discontinuous Galerkin Methods [Mathematics & Applications], p. 384. Springer, Heidelberg (2012)
Durán, R.G., Gastaldi, L., Padra, C.: A posteriori error estimators for mixed approximations of eigenvalue problems. Math. Models Methods Appl. Sci. 9(8), 1165–1178 (1999)
Durán, R.G., Padra, C., Rodríguez, R.: A posteriori error estimates for the finite element approximation of eigenvalue problems. Math. Models Methods Appl. Sci. 13(8), 1219–1229 (2003)
Ern, A., Vohralík, M.: Polynomial-degree-robust a posteriori estimates in a unified setting for conforming, nonconforming, discontinuous Galerkin, and mixed discretizations. SIAM J. Numer. Anal. 53(2), 1058–1081 (2015)
Gardini, F.: Mixed approximation of eigenvalue problems: a superconvergence result. M2AN Math. Model. Numer. Anal. 43(5), 853–865 (2009)
Gedicke, J., Khan, A.: Arnold-Winther mixed finite elements for Stokes eigenvalue problems. SIAM J. Sci. Comput. 40(5), A3449–A3469 (2018)
Grisvard, P.: Elliptic problems in nonsmooth domains. Monographs and Studies in Mathematics, vol. 24. Pitman (Advanced Publishing Program), Boston (1985)
Hannukainen, A., Stenberg, R., Vohralík, M.: A unified framework for a posteriori error estimation for the Stokes problem. Numer. Math. 122(4), 725–769 (2012)
Jia, S., Chen, H., Xie, H.: A posteriori error estimator for eigenvalue problems by mixed finite element method. Sci. China Math. 56(5), 887–900 (2013)
Kim, K.-Y.: Guaranteed a posteriori error estimator for mixed finite element methods of elliptic problems. Appl. Math. Comput. 218(24), 11820–11831 (2012)
Kim, K.-Y.: Postprocessing for the Raviart-Thomas mixed finite element approximation of the eigenvalue problem. Korean J. Math. 26(3), 467–481 (2018)
Kozlov, V.A., Maz’ya, V.G., Rossmann, J.: Elliptic boundary value problems in domains with point singularities. Mathematical Surveys and Monographs, vol. 52, p. 414. American Mathematical Society, Providence (1997)
Ladevèze, P., Leguillon, D.: Error estimate procedure in the finite element method and applications. SIAM J. Numer. Anal. 20(3), 485–509 (1983)
Lederer, P.L., Stenberg, R.: Energy norm analysis of exactly symmetric mixed finite elements for linear elasticity. Math. Comput. 92, 583–605 (2023)
Mercier, B., Osborn, J., Rappaz, J., Raviart, P.-A.: Eigenvalue approximation by mixed and hybrid methods. Math. Comput. 36(154), 427–453 (1981)
Oswald, P.: On a BPX-preconditioner for P1 elements. Computing 51(2), 125–133 (1993)
Prager, W., Synge, J.L.: Approximations in elasticity based on the concept of function space. Q. Appl. Math. 5, 241–269 (1947)
Schöberl, J.: NETGEN An advancing front 2D/3D-mesh generator based on abstract rules. Comput. Vis. Sci. 1(1), 41–52 (1997)
Stenberg, R.: Postprocessing schemes for some mixed finite elements. RAIRO Modél. Math. Anal. Numér. 25(1), 151–167 (1991)
Verfürth, R.: A posteriori error estimation techniques for finite element methods. Numerical Mathematics and Scientific ComputationNumerical Mathematics and Scientific Computation, p. 393. Oxford University Press, Oxford (2013)
Vohralík, M.: Unified primal formulation-based a priori and a posteriori error analysis of mixed finite element methods. Math. Comput. 79(272), 2001–2032 (2010)
Zaglmayr, S.: High order finite element methods for electromagnetic field computation. PhD thesis. JKU Linz, (2006)
Funding
Part of the work was produced while the author was associated to the Aalto University, Finland, where he was supported by the Academy of Finland via the Decision 324611 (PI: Rolf Stenberg).
Author information
Authors and Affiliations
Contributions
The author wrote, read and approved the final version this work and is responsible of all methods implemented.
Corresponding author
Ethics declarations
Competing interests
The author has no relevant financial or non-financial interests to disclose.
Additional information
Communicated by Ragnar Winther.
Publisher's Note
Springer Nature remains neutral with regard to jurisdictional claims in published maps and institutional affiliations.
Appendix
Appendix
In this section we present a proof of the super convergence estimate
For this we will follow very similar steps as in [12] with several changes in order to get the proper h scaling. We define the auxiliary problem: find \(\widehat{u}_h \in U_h\) and \(\widehat{\sigma }_h \in \varSigma _h\) such that
Note that above solution provides the property
Lemma 2
Let \((\lambda ,u,\sigma )\) be the solution of (2), and let \((\widehat{u}_h, \widehat{\sigma }_h)\) be the solution of (18). There holds the estimate
Proof
We solve the continuous problem: Find \(\varTheta \in H({\text {div}}, \varOmega )\) and \(\varPsi \in L^2(\varOmega )\) such that
Note, that we have the regularity \(\varTheta \in H^s(\varOmega , \mathbb {R}^d)\) and \(\varPsi \in H^{1+s}(\varOmega )\) with \(s > 1/2\), and there holds the stability estimate (see for example [20])
This then gives
where we used the commuting diagram property of the \(\text {BDM}\)-interpolation operator \(I_h\) and the \(L^2\) projection \(\varPi ^k\), see Section 2.5 in [10]. By problems (18) and (20) we then have
where the last step followed by \(({\text {div}}(\sigma - \widehat{\sigma }_h), \varPi ^k \varPsi ) = 0\). By the interpolation properties of \(\varPi ^k\) and \(I_h\) and the stability (21) we conclude
\(\square \)
Lemma 3
Let \((\lambda ,u,\sigma )\) be the solution of (2), \((\lambda _h,u_h,\sigma _h)\) be the solution of (3) and let \((\widehat{u}_h, \widehat{\sigma }_h)\) be the solution of (18). There holds the estimate
Proof
We start with the estimate of the divergence term. By the triangle inequality we have
Using \({\text {div}}\varSigma _h = U_h\) gives
thus since also \(\Vert {\text {div}}(\sigma - \sigma _h) \Vert _0 = \Vert \lambda u - \lambda _h u_h\Vert _0\) we have with (6) and a small enough mesh size h that
For the second term we proceed similarly. The triangle inequality gives \(\Vert \sigma - \widehat{\sigma }_h \Vert _0 \le \Vert \sigma - \sigma _h \Vert _0 + \Vert \sigma _h - \widehat{\sigma }_h \Vert _0\). For the latter we then have with (19)
We continue to bound the last term. With \(\Vert \varPi ^k u \Vert _0 \lesssim \Vert u \Vert _0\) we have as above with (6)
Since \(u \in H^{1+s}(\varOmega )\) we can bound \(\Vert u - u_h \Vert _0 \lesssim h \Vert \nabla u \Vert _0\) which gives for h small enough (i.e. bounding \(\Vert \sigma - \sigma _h\Vert ^2_0 \le \Vert \sigma - \sigma _h \Vert _0\))
and thus in total we conclude with
\(\square \)
Lemma 4
Let \((\lambda ,u,\sigma )\) be the solution of (2), \((\lambda _h,u_h,\sigma _h)\) be the solution of (3) and let \((\widehat{u}_h, \widehat{\sigma }_h)\) be the solution of (18). There holds the estimate
Proof
Using equation (19) the proof follows with exactly the same steps as in the proof of Lemma 11 in [12] or Lemma 6.3 in [11]. \(\square \)
Combining above results we have the super convergence property.
Corollary 1
Let \((\lambda ,u,\sigma )\) be the solution of (2), \((\lambda _h,u_h,\sigma _h)\) be the solution of (3) and let \((\widehat{u}_h, \widehat{\sigma }_h)\) be the solution of (18). For h small enough there holds the super convergence property
Rights and permissions
Open Access This article is licensed under a Creative Commons Attribution 4.0 International License, which permits use, sharing, adaptation, distribution and reproduction in any medium or format, as long as you give appropriate credit to the original author(s) and the source, provide a link to the Creative Commons licence, and indicate if changes were made. The images or other third party material in this article are included in the article’s Creative Commons licence, unless indicated otherwise in a credit line to the material. If material is not included in the article’s Creative Commons licence and your intended use is not permitted by statutory regulation or exceeds the permitted use, you will need to obtain permission directly from the copyright holder. To view a copy of this licence, visit http://creativecommons.org/licenses/by/4.0/.
About this article

Cite this article
Lederer, P.L. Asymptotically exact a posteriori error estimates for the BDM finite element approximation of mixed Laplace eigenvalue problems. Bit Numer Math 63, 34 (2023). https://doi.org/10.1007/s10543-023-00976-w
Received:
Accepted:
Published:
DOI: https://doi.org/10.1007/s10543-023-00976-w