
Abstract
In this paper, two models of interest for Celestial Mechanics are presented and analysed, using both analytic and numerical techniques, from the point of view of the possible presence of regular and/or chaotic motion, as well as the stability of the considered orbits. The first model, presented in a Hamiltonian formalism, can be used to describe the motion of a satellite around Earth, taking into account both the non-spherical shape of our planet and the third-body gravitational influence of Sun and Moon. Using semi-analytical techniques coming from Normal Form and Nekhoroshev theories it is possible to provide stability estimates for the orbital elements of its geocentric motion. The second dynamical system presented can be used as a simplified model to describe the motion of a particle in an elliptic galaxy having a central massive core; it is constructed as a refraction billiard where an inner dynamics, induced by a Keplerian potential, is coupled with an external one, where a harmonic oscillator-type potential is considered. The investigation of the dynamics is carried on by using results of ODEs’ theory and is focused on studying the trajectories’ properties in terms of periodicity, stability and, possibly, chaoticity.
Similar content being viewed by others
Avoid common mistakes on your manuscript.
1 Introduction
Phenomena involving the motion of Celestial bodies, either on a planetary or a galactic scale, are often characterised by a complex behaviour, whose accurate study requires different tools, like numerical integration, analytical study or direct observations (Lidov 1962; Kozai 1962; Kaula 1966; Hughes 1980; Giorgilli and Skokos 1997; Bolotin and Negrini 2001; Knauf 2002; Daquin et al. 2016; Celletti et al. 2017; Barutello et al. 2021; Baldomá et al. 2022). Analytical techniques represent, whenever applicable, useful strategies to study some of the main properties of the orbits in a gravitational system, especially in terms of long-term dynamics, providing results which are rigorous, as they follow form precise mathematical statements, and often general, in the sense that they potentially hold for a large set of trajectories (equivalently, of initial conditions).
Along with purely analytical techniques, in some circumstances a mixed approach which includes numerics as well is possible: this is what happens, for example, when theoretical results are compared with simulations and observations, or in the case of semi-analytical approaches. Generally speaking, such expression refers to a class of methods where rigorous mathematical theorems are applied to numerically computed quantities (for example, within a Hamiltonian framework, to functions expressed through a truncated Taylor expansion, cfr. Section 2)
This paper aims to illustrate the potential of such techniques, either analytic or semi-analytic, presenting the dynamical investigation of two models describing the geocentric motion of an object around Earth and the trajectories of a body inside an elliptic galaxy with a massive core. In both cases, the motion of our test particle is influenced by the gravitational attraction of a variety of different mass distributions, depending on the model itself: as expected, the resulting dynamics is quite complex, and our main objective is to study its properties for long (possibly infinite) time scales.
The issue of long-term stability in geocentric motions is the core topic of Sect. 2, where a point-mass particle subjected to the attraction of (non-spherical) Earth, Sun and Moon is taken into account. In general, the main question we try to answer is for how long it is possible to control the variation in the orbital elements (semimajor axis \(a\), eccentricity \(e\), inclination \(i\)) of our object, considering different initial conditions and, in particular, for different altitude regimes (we will use the classical distinction between LEO, MEO and GEO distances). Producing stability estimates for orbiting bodies at different distances from our planet’s surface is a key problem in Celestial Mechanics, which can be applied to many different cases of practical interest. In particular, this problem is crucial when dealing with space debris: in view of their large overall number and the collision hazard (cfr. ESA (2022)), the effort in predicting as well as possible their long-time behaviour has involved a remarkable community of mathematicians and astronomers (see for example Celletti et al. (2021, 2022), Daquin et al. (2016), Nie and Gurfil (2021), Shute and Chiville (1966), and, for a survey on the possible methods, Celletti (2023)).
Following the vast literature on the subject, the satellites’ dynamics is formalised within a Hamiltonian setting via the so-called geolunisolar Hamiltonian
where \(\boldsymbol {r}\), \(\boldsymbol{\dot{r}}\) are the position and velocity vector of our satellite in a suitable reference system, while the three potential parts refers to Earth’s geopotential up to \(J_{2}\)-term (see Sect. 2.1 and Kaula (1966) for details) and Sun’s and Moon’s gravitational attractions treated as third-body perturbations.
As already anticipated, the techniques we used to produce stability estimates fall into the category of the semi-analytical methods, since ℋ opportunely treated, and expressed in its secular form (namely, averaged over the fast motions, see Sect. 2.1) can be written as a truncated Taylor expansion whose coefficients are computed numerically.
From a mathematical point of view, we propose two methods to produce stability estimates, holding in different regimes and based on distinct analytical results.
With the first strategy, we provide stability estimates for the quantity \(\mathcal {I}=\sqrt{\mu _{E} a}\sqrt{1-e^{2}}(1-\cos{i})\) in quasi circular and quasi equatorial orbits, computing an upper bound for the time up to which the variation of such quantity remains bounded within a certain range. The technique proposed (see also Steichen and Giorgilli (1997)) is based on the application of a normal form algorithm. We use canonical transformations in action-angle coordinates to reduce the Hamiltonian (1) to the form
where \(h_{0}\) admits ℐ as a first integral; as for \(h_{1}\), it is so small that the overall dynamics can be considered a perturbation of the one induced by \(h_{0}\). The stability of ℐ along the trajectories can be then deduced from the size of \(h_{1}\). The results obtained, holding for small values of the eccentricity and inclination and five different values for the semimajor axis, corresponding to LEO, MEO, GEO region and beyond, are shown in Table 1. In short, one can say that the numerically computed stability times are extremely long, of the order of \(10^{4}\) years even in the worst case, although a worsening, due to the strengthening of the influence of Sun’s and Moon’s attraction, is evident beyond GEO region.
As for the second method, which is the subject of the analysis carried on in Sect. 2.3, it is based on Nekhoroshev theorem on exponential stability estimates (see Nekhoroshev (1977)). It allows to cover a larger domain in eccentricity and inclination for satellites in MEO, and in particular for distances (in terms of semimajor axis) between \(11{,}000\text{ km}\) and \(19{,}000\text{ km}\). Nekhoroshev theorem has already been used in some problems coming from Celestial Mechanics, like for example in the model of the Trojan asteroids (Giorgilli and Skokos (1997)) and in the three-body problem (Celletti and Ferrara (1996), Celletti and Giorgilli (1991)), and applies again to the case of a quasi-integrable Hamiltonian. Given an Hamiltonian function as in Eq. (2), where all the actions are first integrals for the unperturbed dynamics, under suitable conditions it provides stability times in the complete model which are exponentially long in the perturbation’s size. The hypotheses required involve suitable nondegeneracy conditions on the unperturbed Hamiltonian \(h_{0}\), as well as a smallness condition on the size of \(h_{1}\).
In the present work, a nonresonant version of the theorem, which does not apply close to the secular geolunisolar resonances (see Breiter (1999)), has been used. Nevertheless, a more complete analysis, which covers a wider regime, is possible provided a rigorous analysis of the geometry of resonances of the geolunisolar problem is carried on. The results in terms of stability times are presented in Sect. 2.3, Fig. 2: they are particularly good for low altitudes, and tend to worsen for increasing values of \(a\). This phenomenon partially depends on the algorithm used to produce our stability estimates and will find an heuristic explanation in Sect. 2.3.
We highlight that, although the semi-analytical procedure proposed is applied, in the current paper, to geocentric motions, it can be potentially extended to any case where a small object orbits around a massive non-spherical body, with the addition of third-body perturbations.
The second model taken into consideration can be used to carry on a preliminary analysis on the motion of a particle in an elliptic galaxy having a central mass (a Black Hole or, in general, a massive core). This kind of motion, especially under the influence of very massive central bodies, is particularly complex, and having a rigorous and reliable model to describe it would require to take into consideration the anisotropies in the mass distribution inside the galaxy, as well as relativistic effects. Situations of galaxies presenting Black Holes at their centers are quite common in actual galactic systems (see the review Ferrarese and Ford (2005)), and it is natural, for anyone working in Celestial Mechanics, to ask how the presence of such a large central mass affects the dynamics, as The study we propose in Sect. 3 takes into account a dynamical model inspired by the one presented in Delis et al. (2015). Here, the authors consider the motion of a particle attracted by both an elliptic distribution of matter and a central mass. The resulting gravitational potential is the superimposition of a Keplerian contribution and a harmonic oscillator-type one and leads to the establishment of two different regimes: whenever our test particle is close to the central body, the Keplerian attracting force of the latter is much more intense than the one of the overall galaxy, while the contrary happens whenever the particle is sufficiently far from the Black Hole. When the galaxy’s mass distribution is an uniform ellipsoid, one can model its gravitational attraction via a harmonic oscillator-type potential (see Chandrasekhar (1967)), where the frequencies over the three axes of the oscillations depend on the three semiaxes; on the other hand, ignoring possible relativistic effects the potential of the central mass is a classical Keplerian one. In Delis et al. (2015), the investigation of the model so constructed is carried on by means of a mixed analytical and numerical approach, and evidences of chaotic behaviour based on estimates of the corresponding Lyapunov exponents (see Kalapotharakos (2008)) are shown.
Here (see also De Blasi and Terracini (2022, 2023), Barutello et al. (2023)), we propose a rigorous analysis which, although substantiated by numerical evidences, relies on a purely analytical approach; the price to pay is the necessity to introduce a simpler model, where the superposition of the two potential does not occur anymore. As in Delis et al. (2015), we suppose that the distribution of matter in the ellipsoid is constant (except for the central body), and we build the model in such a way that our test particle is either attracted by the central mass or by the overall elliptic mass distribution. In practice, we divide the space into two regions, in each of which one of the two limit regimes identified by Delis et al. (2015) occurs. In the inner region, representing the region of influence of the central mass, only its (Keplerian) attraction is considered; on the contrary, in a second region, exterior, the particle moves only under the influence of an isotropic harmonic oscillator. On the interface that separates these two regions the potential governing the particle’s motion is generally discontinuous. To treat such discontinuity, we suppose that every time the particle hits the interface it undergoes a refraction, which deflects its velocity by a quantity that depends on the potentials’ values in the transition point, as well as the hitting angle. Such refraction law, which in practice is a generalisation of classical Snell’s law for light rays, can be interpreted as a limit case for a smooth passage from one potential to the other, where the intermediate region in which the two potentials are superimposed shrinks more and more (from a practical point of view, the paper Delis et al. (2015) also provides estimates for the distance from the central mass at which the two potentials produce comparable forces).
At this stage, we restrict our analysis on the planar case, considering one of the three invariant planes of the system identified by the ellipsoid’s axes; this assumption will be removed in the future, where the three dimensional case will be considered.
From a mathematical point of view, we construct our model by relying on the well established theory of mathematical billiards (see for example Tabachnikov (2005) for an extensive survey on the classical theory), and constructing the so-called galactic refraction billiard. In the classical case of mathematical billiards, a free particle moves inside a regular domain, following straight lines and bouncing against the boundary with an elastic reflection; deriving the properties of the particle’s motion (equilibrium trajectories, existence of periodic orbits, chaotic regimes etc.) is a highly nontrivial problem, which has involved a wide community of mathematicians for at least one century.
Within this framework, our billiard can be considered as a variation of the classical case, where the inner mass’ domain of influence represents our billiard table, although two important differences have to be highlighted. First of all, the particle can exit from the domain, interacting with its boundary not with a simple reflection, but rather with a refraction that deflects its velocity vector. On the other hand, the presence of inner and outer gravitational interactions leads to the appearance of two (outer and inner) non constant potential, so that the particle moves through curved geodesics instead of straight lines. Other examples of billiards with potentials, both in the reflective case and in the case of a coupled dynamics, are given in Gasiorek (2021), Lerman and Zharnitsky (2021); a remarkable example is given by Kepler billiards (see Panov (1994), Takeuchi and Zhao (2024) and references therein), which, as we will see in Sect. 3.2, present strong analogies with our model.
The results summarised in the present paper regard different aspects of the dynamics of refraction galactic billiards and have been achieved by using a wide class of tools coming from nonlinear analysis and the general theory of dynamical systems, as well as, sometimes, substantiated by numerical simulations. The first problem considered, as natural while dealing with a new dynamical system, is the existence and stability of equilibrium trajectories. This is the first topic of Sect. 3.1, where a particular class of equilibrium orbits, called homothetic and composed by straight lines, is considered. Such trajectories always exist when our domain is convex and smooth, and their linear stability can be studied by relying on the formalism of classical billiards and variational methods. In this framework, nontrivial bifurcation phenomena, occurring for non-circular domains with sufficiently smooth boundary, are shown, both from an analytical and a numerical point of view.
After this preliminary (and local) analysis on the trajectory orbits, the investigation becomes more global and the problem of the existence of periodic and quasi-periodic trajectories (see Fig. 1) is treated. We work in a quasi-integrable regime, considering domains whose boundary is close to a circumference, and, as a consequence, can be treated with the powerful tools of perturbation theory (see also Celletti (2023), where such concepts are explained in a slightly different framework). In particular, we shall make use of KAM theorem (see Möser (1962)), Poincaré-Birkhoff and Aubry-Mather theories (see Golé (2001)) to prove that, whenever our domain’s boundary is smooth enough and sufficiently close to a circle, then there exists orbits with any rotation number within a certain range (see Theorem 6 and Eq. (55) for the formal definition of rotation number). We stress that our case is not the first application of KAM, Aubry-Mather and Poincaré-Birkhoff theories in problems coming from Celestial Mechanics: examples are Celletti and Chierchia (2007), Boscaggin et al. (2021).

Examples of orbits of refraction galactic billiards. The orbit goes inside and outside the domain, being deflected at every passage through the interface. Left: ten-periodic trajectory. Right: quasi-periodic trajectory (figures adapted from De Blasi and Terracini (2023))
The landing point of the analysis of the galactic billiards’ dynamics in the regime here presented is included in Sect. 3.2, where we address the problem of the possible chaoticity of the system. In our specific case, evidences of chaotic behaviour are included in both Delis et al. (2015) and the numerical simulations presented in De Blasi and Terracini (2022) and reproduced in Fig. 12: these two elements motivated the prosecution of the study in this direction, trying to formally prove the chaoticity of the model.
The final result resumes in the detection of a simple geometric condition on the domain’s shape, called admissibility, that ensures the existence of a topologically chaotic subsystem of the galactic refraction billiard for large enough inner energies (see Theorem 7). Roughly speaking, and postponing the rigorous definition to Sect. 3.2 (and in particular Definition 2), we say that a domain with smooth boundary is admissible whenever there exist two segments from the Keplerian mass which are orthogonal to the boundary, not antipodal with respect to the origin and such that they are nondegenerate (that is, the hitting point is a strict maximum or minimum of the function distance from the mass restricted to the domain’s boundary), see Sect. 3.2, Fig. 13. In practice, admissibility acts as a sufficient condition that, through a particular construction called symbolic dynamics, ensures that our galactic billiard is chaotic for sufficiently large inner energies.
Also in this case, we stress that our work can be considered as a part of a vast literature, whose aim is to investigate and detect, with different techniques, chaotic systems in Celestial Mechanics, both with a rigorous analytical approach (see for example Bolotin (2017), Baldomá et al. (2022, 2023)), and with a more numerical point of view (Guzzo and Lega (2023), Froeschlé et al. (1997)).
2 Hamiltonian methods for satellites’ stability estimates
The current Section summarises the results of De Blasi et al. (2021b), Celletti et al. (2023) regarding the long-term stability for bodies orbiting around the Earth, considering, in a Hamiltonian setting, the gravitational attraction of our planet, Sun and Moon.
Section 2.1 describes the Hamiltonian model taken into consideration, including the set of action-angle variables used, with particular attention on their physical meaning in terms of orbital elements. Section 2.2 resumes the main ideas behind normal form theory, proposing then the application of such approach to our model to produce stability estimates for eccentricity and inclination, locked in the quasi-integral \(\mathcal {I}=\sqrt{\mu _{E} a}\sqrt{1-e^{2}}(1-\cos{i})\), for quasi circular and quasi equatorial orbits. Section 2.3 widen the set of initial conditions to more inclined and eccentric orbits within MEO distances: in this case, an approach based on the application of Nekhoroshev theorem is taken into account. Finally, Sect. 2.4 presents some considerations on the results obtained, comparing the two approaches both in terms of the numerical outcome and theoretical consequences.
2.1 The Hamiltonian model
To construct the Hamiltonian function related to the geolunisolar model, let us start by considering a geocentric reference frame in the space, with coordinate axes \(x\), \(y \text{ and } z\), where the \((x,y)\)-plane corresponds to the Earth’s equatorial one and the \(x\)-axis points towards the line of the equinox. In such framework, the geolunisolar Hamiltonian referred to a point-mass particle of coordinate vector \(\boldsymbol{r}=(x,y,z)\) can be expressed byFootnote 1
where the potential terms are given as follows:
-
the term \(\mathcal {H}_{E}\) is the Earth’s gravitational potential which takes into account the non-spherical shape of our planet; it can be expressed as an expansion in spherical harmonics, as described in Kaula (1962). In the current model, such expansion is truncated up to the \(J_{2}\)-term,Footnote 2 giving rise to an expression of the form
$$ \mathcal {H}_{E}(\boldsymbol {r})=-\frac{\mu _{E}}{|\boldsymbol {r}|} - J_{2} \frac{\mu _{E} R_{E}}{|\boldsymbol {r}|^{3}}\left (\frac{1}{2}- \frac{3 z^{2}}{2|\boldsymbol {r}|^{2}}\right ), $$(4)where \(R_{E}=6378.14\text{ km}\) and \(\mu _{E}=\mathcal {G} M_{E} = 1.52984 \times 10^{9}\ R_{E}^{3}/yr^{2}\) are respectively the Earth’s radius and mass parameter and \(J_{2}=-1082.6261\times 10^{-6}\) is a dimensionless parameter;
-
the terms \(\mathcal {H}_{S}\) and \(\mathcal {H}_{M}\) refer to the gravitational attraction of Sun and Moon, whose motion in the geocentric reference frame is given respectively by the time-dependent position vectors \(\boldsymbol {r}_{S}(t)=(x_{S}(t), y_{S}(t), z_{S}(t))\) and \(\boldsymbol {r}_{M}(t)=(x_{M}(t), y_{M}(t), z_{M}(t))\). More precisely, one has
$$ \begin{aligned} \mathcal {H}_{S}(\boldsymbol {r}; t) &= -\mu _{S}\left ( \frac{1}{|\boldsymbol {r}-\boldsymbol {r}_{S}|}- \frac{\boldsymbol {r}\cdot \boldsymbol {r}_{S}}{|\boldsymbol {r}_{S}|^{3}} \right ), \\ \mathcal {H}_{M}(\boldsymbol {r}; t) &= -\mu _{M}\left ( \frac{1}{|\boldsymbol {r}-\boldsymbol {r}_{M}|}- \frac{\boldsymbol {r}\cdot \boldsymbol {r}_{M}}{|\boldsymbol {r}_{M}|^{3}} \right ), \end{aligned} $$(5)where again \(\mu _{S}\) and \(\mu _{M}\) are respectively the mass parameters of Sun and Moon. As for the analytic expression of \(\boldsymbol {r}_{S}\) and \(\boldsymbol {r}_{M}\), one has that both bodies moving around Earth describing ellipses: the orbital parameters (inclination \(i_{0}\), semimajor axis \(a\) and eccentricity \(e\)) of Sun are \(i_{0S}=23.43^{\circ}\), \(a_{S}=1.469\times 10^{8}\text{ km}\) and \(e_{S}=0.0167\), while for the Moon one has \(i_{0M}=i_{0S}\), \(a_{M}=384{,}748\text{ km}\) and \(e_{M}=0.065\).
From a dynamical point of view, assuming that the Moon lies on the ecliptic plane corresponds to neglect the precession of the Lunar node: as will be observed later in Sect. 2.3, this assumption will have important effects close to the so-called secular lunisolar resonances. In general, they consist in a commensurability relation between the frequencies associated to the satellite’s argument of pericenter and longitude of the ascending node, see also Hughes (1980).
Since the motion of our point-mass particle is a geocentric trajectory, it is convenient to express the Hamiltonian (3) in terms of the particle’s orbital elements; such change of variables is performed by expressing, as in De Blasi et al. (2021) and Murray and Dermott (1999), the coordinates \(x\), \(y\), \(z\) (resp. the components \(x_{S}\), \(y_{S}\), \(z_{S}\) of \(\boldsymbol {r}_{S}\) and \(x_{ M}\), \(y_{ M}\), \(z_{M}\) of \(\boldsymbol {r}_{M}\)) in terms of orbital elements \((a,e,i, M, \omega ,\Omega )\) (resp. \(a_{S}\), \(e_{S}\), \(i_{S}\), \(M_{S}\), \(\omega _{S}\) and \(\Omega _{S}\) and \(a_{ M}\), \(e_{ M}\), \(i_{M}\), \(M_{M}\), \(\omega _{ M}\) and \(\Omega _{ M}\)), where \(a\), \(e\) and \(i\) denote respectively the orbit’s semimajor axis, eccentricity and inclination, while the angles \(M\), \(\omega \) and \(\Omega \) are the mean anomaly, the argument of the perigee and the longitude of the nodes. The resulting Hamiltonian, which will still be called ℋ, is a function of \((a,e,i,M, \omega , \Omega )\), where the time dependence is expressed by the mean anomalies \(M_{S}\) and \(M_{M}\) of Sun and Moon, as well as by the angle \(M\).
When one is interested to the satellite’s long term dynamics, the Hamiltonian ℋ can be further simplified, removing the dependence on the time, by considering an averaging process over the fast angles of the problem (namely, the three mean anomalies; an analogous reasoning to find the secular Hamiltonian can be found, for example, in Legnaro and Efthymiopoulos (2023), Daquin et al. (2016), Celletti et al. (2017b), Gkolias et al. (2019), Celletti et al. (2016)). The result of this averaging is the secular geolunisolar Hamiltonian
The elimination of the satellite’s mean anomaly \(M\) implies that, in the secular model, the semimajor axis is constant; from this moment on, it will be treated as a parameter, whose reference value will be denoted by \(a_{*}\). The Hamiltonian \(\mathcal {H}_{sec}\) is the starting point to obtain long-term stability estimates for the secular geolunisolar model, either with normalization techniques, as in Sect. 2.2, or through the application of stronger results, such as Nekhoroshev Theorem, as in the case of Sect. 2.3. In order to carry on such investigation, one needs to express the above Hamiltonian in terms of action-angle variables, such as the so-called modified Delaunay ones (see Morbidelli (2002)), whose relation with the orbital elements is given by
Note that, in terms of these new variables, the averaging performed above corresponds to the elimination of the fast angle \(\lambda \), and, subsequently, to take the first action \(L\) (and then the semimajor axis) as a constant, which we call \(L_{*}= \sqrt{\mu _{E} a_{*}}\).
As for the eccentricity and inclination, the presence of Sun and Moon on the ecliptic plane forces the existence of a circular, non-equatorial equilibrium orbit, of inclination \(i^{(eq)}\) and eccentricity \(e^{(eq)}=0\). In particular, the equilibrium inclination depends on \(a_{*}\) through the relation
The equilibrium points \((e^{(eq)}, i^{(eq)})\) are traditionally called the forced (or proper) elements of the secular model (see for example Tremaine et al. (2009)), while the plane with inclination \(i^{(eq)}\) is the Laplace plane; more rigorous estimates on the value of \(i^{(eq)}\) and its behaviour as a function of the distance can be found in Rosengren et al. (2014).
The stability estimates produced in this work are obtained by means of a semi-analytical approach, namely, the application on rigorous analytical results on Hamiltonian computed numerically by means of the software Mathematica©: for this reason, in Sects. 2.2 and 2.3 we shall make use of a truncated expression of \(\mathcal {H}_{sec}\), whose truncation order will be specified case by case.
2.2 Stability estimates through normal forms
The first technique we propose to estimate the stability of the orbital elements in the secular geolunisolar model relies on the application of a normal form algorithm, and is similar to the one used in Steichen and Giorgilli (1997). Before passing to the actual computation of the stability time in the satellites’ case, a brief general introduction of normal form theory is in order (see also Efthymiopoulos (2011)).
Let us start by taking a Hamiltonian function expressed in action-angle variables \(\mathcal {H}(\boldsymbol {J}, \boldsymbol {\theta})\), where \((\boldsymbol {J}, \boldsymbol {\theta})\in U\times \mathbb{T}^{n}\), \(n\) being the degrees of freedom of the system and \(U\subset \mathbb{R}^{n}\) open. The principal aim of a normalization algorithm is to find a close-to-identity canonical transformation \(\Phi :(\boldsymbol {J}, \boldsymbol {\theta})\mapsto (\boldsymbol {J}', \boldsymbol{\theta}')\) such that the new Hamiltonian \(\mathcal {H}'=\mathcal {H}\circ \Phi ^{-1}\) takes the form
where:
-
\(Z(\boldsymbol {J}', \boldsymbol{\theta}')\) is the so-called normal part, and has some desired property as, for example, the presence of first integrals of the motion;
-
\(R(\boldsymbol {J}', \boldsymbol{\theta}')\) is the remainder: in a suitable functional norm \(\|\cdot \|\), it is such that \(\|R\|\ll \|Z\|\).
If the remainder’s size is sufficiently small with respect to the normal part’s ones, the overall dynamics under \(\mathcal {H}'\) (and then under ℋ) can be considered as a small perturbation of the one induced by \(Z\). As a consequence, if \(Z\) admits some integrals of the motion, such quantities are quasi-constant for the whole \(\mathcal {H}'\). The transformation \(\Phi \) can be found by means of the Lie series technique: its construction algorithm, which depends on the properties of the normal part we seek, is here omitted, and can be found in Efthymiopoulos (2011).
In this Section, a normalization algorithm is used to produce stability estimates for the eccentricity and inclination for orbits close to the equilibrium one, which has orbital parameters \((a_{*}, e^{(eq)}, i^{(eq)})\) (see Sect. 2.1). As a preliminary step for this analysis, it is convenient to consider a set of modified Delaunay coordinates which are centered around the equilibrium, performing the change of coordinates
where \(P^{(eq)}=\sqrt{\mu _{E} a_{*}}\left (1-\sqrt{1-(e^{(eq)})^{2}} \right )=0\) and \(Q^{(eq)}{=}\sqrt{\mu _{E}a_{*}}\sqrt{1-(e^{(eq)})^{2}}\left (1-\cos{ \left (i^{(eq)}\right )}\right )=\sqrt{\mu _{E}a_{*}} \left (1-\cos{ \left (i^{(eq)}\right )}\right )\). By means of a Taylor expansion, the Hamiltonian can be then written as a trigonometric polynomial in the square roots of the actions as
By construction and from Eq. (7), one has that, for quasi-circular orbits close to the Laplace plane
where \((e,i)\) have to be intended as the differences with respect to the forced values \((0, i^{(eq)})\); this implies that, in the expansion (11), the \(s\)-th term in the sum is of total order \(s\) in eccentricity and inclination.
For computational reasons, and in particular in order to make our routine compatible with running on standard laptops, in the following estimates the series in Eq. (11) is truncated up to order \(N=15\). The rigorous procedure to obtain \(\mathcal {H}(I_{1}, I_{2}, \phi _{1}, \phi _{2})\) is described in De Blasi et al. (2021), where one can also observe that the first order frequencies \(\nu _{1}\) and \(\nu _{2}\) are nearly equal: this fact, which implies a \(1:1\) resonance between the conjugate angles \(\phi _{1}\) and \(\phi _{2}\), will be crucial in the normalization procedure.
Once the Hamiltonian is in the form of Eq. (11) one can proceed with a normalization that consists in finding a change of coordinates which makes the normal part depending only on the resonant angle \(\phi _{1}-\phi _{2}\). The result is a near-identity canonical transformation \(\Phi \) such that the new Hamiltonian (which, with an abuse of notation, will be still called \(\mathcal {H}(I_{1},I_{2}, \phi _{1},\phi _{2})\)) is given by the sum
From a practical point of view, this result is achieved by applying to the initial Hamiltonian a sequence of transformations in the form of Lie series, aiming to remove the dependence on the angles, except for the resonant combination \(\phi _{1}-\phi _{2}\), from all the terms of the series (11) up to order \(M=12\). The choice of the normalization order \(M\) is of particular importance to obtain optimal estimates: for more details on that, see Fassò and Benettin (1989), and, for explicit estimates in our case, see De Blasi et al. (2021b).
Hamiltonians in the form of (13) are usually said to be in resonant normal form: here, the normal part is composed by the secular term \(Z_{sec}\), which does not depend on the angles, and the resonant one, that depends on the actions as well as on the resonant combination \(\phi _{1}-\phi _{2}\). As for the remainder, it is by construction of order \(M\) in the square roots of the actions (namely, recalling Eq. (12), in eccentricity and inclinationFootnote 3).
It is easy to prove that the quantity
is an integral of the motion for the dynamics induced by the sole normal part \(Z_{sec}+Z_{res}\). The conservation of such quantity (corresponding to the vertical component of angular momentum), determines a locking between eccentricity and inclination, whose changes will keep constant the value of \(I_{1}+I_{2}\). This fact, also known as Lidov-Kozai effect (see Kozai (1962), Lidov (1962)), is common in many model of Celestial Mechanics which present resonance phenomena.
For the overall dynamics induced by (13), the quantity \(I_{1}+I_{2}\) it is not constant anymore; nevertheless, if the remainder’s norm is sufficiently small, is can be considered as quasi-constant. It is then possible to obtain stability estimates for \(I_{1}+I_{2}\) by measuring the size of \(R\) in a suitable functional norm.
More precisely, let us fix a domain \(\mathcal {D}\subset \mathbb{R}^{2}\) around the forced values for eccentricity and inclination \((0, i^{(eq)})\), and, given a function \(f(e, i, \phi _{1}, \phi _{2}): \mathcal {D}\times \mathbb{T}^{2}\to \mathbb{R}\) consider the functional sup norm
Our final objective is to evaluate the variation of \(I_{1}+I_{2}\) along the trajectories induced by the normalized Hamiltonian in (13): to this aim, let us recall the relation
where the notation \(\{\cdot ,\cdot \}\) denotes the Poisson brackets (see Giorgilli (2022)). Being \(I_{1}+I_{2}\) a first integral for the normal part, \(\{I_{1}+I_{2}, Z_{sec}+Z_{res}\}=0\), and then, given any \((\hat{e}, \hat{i}, \hat{\phi _{1}}, \hat{\phi _{2}})\in \mathcal {D} \times \mathbb{T}^{2}\), one has
Let us now suppose that at the time \(t=0\) the quantity \(I_{1}+I_{2}\) has value \(I_{1}^{0}+I_{2}^{0}\), corresponding to eccentricity and inclination \((e^{0}, i^{0})\in \mathcal {D}\), and consider its time evolution over \(t\). Suppose now to fix \(\Gamma >0\) as the maximal variation allowed over a certain time for \((I_{1}+I_{2})(t)\): applying the mean value theorem, it is possible to compute an upper bound for the time \(T\) such that, for any \(t\leq T\),
As a matter of fact, from Eq. (17) one has that
so that
The upper bound \(\tilde{T}=\Gamma /\|\{I_{1}+I_{2}, R\}\|_{D, \infty}\) is the stability time we seek: it depends of course on the maximal variation allowed \(\Gamma \), as well as on the amplitude of the domain \(\mathcal {D}\) in eccentricity and inclination we want to analyse. It is clear that the value of \(\tilde{T}\) increases with \(\Gamma \) and by taking smaller domains around the forced elements; moreover, it has a dependence on the reference value of the semimajor axis \(a_{*}\).
For computational reasons, to produce the numerical estimates on \(\tilde{T}\) the domain \(\mathcal {D}\) is set to be \(\mathcal {D}=\{(e,i)\in [0,0.1]\times [0\text{ rad}, 0.1 \text{ rad}]\}\), while \(\Gamma \) will depend on \(a_{*}\) through the relationFootnote 4
additionally, the sup norm in (15) is replaced with an alternative functional norm based on majorization (see the details in De Blasi et al. (2021b)).
It is clear that the whole stability estimate process depends crucially on the semimajor axis, which in the secular geolunisolar model is a constant parameter; for this reason, in the numerical estimates we distinguished within five different cases to cover distinct regimes (for the sake of clarity, they will be given in terms of the sum of the altitude with the Earth’s radius):
-
\(a_{*}^{(1)}= 3000\text{ km} + R_{E}\), corresponding to an orbit just above the atmosphere;
-
\(a_{*}^{(2)}=20{,}000\text{ km}+R_{E}\), located in the MEO region;
-
\(a_{*}^{(3)}=35{,}786\text{ km} + R_{E}\), which corresponds to the altitude of GEO orbits;
-
\(a_{*}^{(4)}=50{,}000 \text{ km} + R_{E}\), corresponding to far object;
-
\(a_{*}^{(5)}=100{,}000\text{ km} + R_{E}\), which is the distance of objects very far from the Earth, where the influence of Sun and Moon is particularly strong.
Table 1 shows the stability times obtained for these values of the semimajor axis: as one can easily notice, though particularly long, the time \(\tilde{T}\) decreases with the altitude, with a significant worsening beyond GEO distance. Moreover, we observe that, at least from a theoretical point of view, the estimates for MEO and GEO region could be influenced by the presence of the secular resonances \(2:1\) and \(1:1\) (corresponding to the location of geostationary and GPS satellites, see for example Hughes (1980), Celletti and Galeş (2014)).
These results are consistent with the theory: for small values of the semimajor axis the secular geolunisolar model can be well approximated by the secular \(J_{2}\) model (where only the geopotential up to the term \(J_{2}\) is considered, averaged over the mean anomaly), which is integrable; on the other hand, going farther from Earth’s surface, the influence of Sun and Moon gets stronger and stronger, leading to a perturbation that produces instability in the model.
2.3 Exponential stability estimates through Nekhoroshev theorem
Another method to produce stability estimates is based on the celebrated Nekhoroshev theorem (Nekhoroshev (1977), Pöschel (1993)), here presented in its nonresonant version. In general, such theorem can be applied to quasi-integrable Hamiltonians of the form
where \(h_{0}\) depends only on the actions and \(h_{1}\) depends on the angles as well. As a consequence of Hamilton’s equations, the dynamics induced by \(h_{0}\) has the actions as first integrals of the motion, namely, \(\boldsymbol {J}(t)=\boldsymbol {J}_{0}\) for any \(t\geq 0\), \(\boldsymbol {J}_{0}\) being their initial values. Under some suitable nondegeneracy condition on \(h_{0}\) and provided that the perturbative function \(h_{1}\) is small enough it is possible to estimate the stability time of the actions under the dynamics induced by the whole ℋ: in particular, it is possible to find an open set around \(J_{0}\) where the actions are bounded for a time which is exponentially long in the inverse of the perturbation’s norm.
In the most general formulation of Nekhoroshev theorem, the nondegeneracy hypothesis required on \(h_{0}\), (steepness), resumes in asking for a quantitative transversality condition for the gradient \(\nabla h_{0}\). Here, we will rely on a simpler nonresonance hypothesis, based on the non-commensurability of the coefficients of the actions at first order, which can be easily verified numerically. As we will see while presenting the numerical results (see Fig. 2), the application of this simpler version of the theorem implies a cost in terms of the region of the \((a,e,i)\)-space where our estimates hold: nevertheless, the stability times obtained are particularly good in a strip of MEO region and in a nonresonant regime, being comparable with the satellites’ average orbital lifetime; a finer analysis, considering the geometry of the resonances in the geolunisolar problem, is anyway possible.

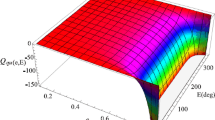
Stability times computed for different values of semimajor axis, eccentricity and inclination using the nonresonant version of Nekhoroshev theorem. The color scale refers to the computed stability times (in years), while the white region correspond to the values of \((e,i)\) where Theorem 1 can not be applied with the presented algorithm. The red lines are in correspondence of the inclinations of the secular geolunisolar resonances. Figure adapted from Celletti et al. (2023)
To apply the nonresonant version of Nekhoroshev theorem to our geolunisolar case, it is necessary to put the Hamiltonian (6) in the form of a sum of an integrable term and a perturbation, as in Eq. (22): to this aim, we will rely again on a normal form algorithm.
Hamiltonian preparation
Let us start from the secular geolunisolar Hamiltonian as presented in Eq. (6). While in Sect. 2.2 we focused our investigation in a small neighborhood (in eccentricity and inclination) of the forced elements \((0, i^{(eq)})\), here we aim to provide stability times holding for values of the orbital parameters which are not necessarily small. We will then produce a sequence of Hamiltonian functions, each of which is obtained by expanding \(\mathcal {H}_{sec}\) around a triplet of reference values \((a_{*},e_{*},i_{*})\) in a grid covering the set \([11{,}000\text{ km}, 20{,}000 \text{ km}]\times [0,0.5]\times [0^{\circ},90^{ \circ}]\). For each Hamiltonian of such sequence, we will follow a numerical procedure, described below, to provide stability estimates holding in a neighborhood of the corresponding reference values \((e_{*}, i_{*})\) (remember that, in the secular geolunisolar problem, the semimajor axis \(a_{*}\) is a priori constant for any forward time).
In practice, once fixed \((a_{*}, e_{*}, i_{*})\), one can perform a translation in the actions analogous to the one presented in Eq. (10) to obtain an expansion of the form
where the \(j\)-th term of the sum is given by
Note that the expansion in Eq. (23) is the analogous of Eq. (11) in Sect. 2.2, although in this case the exponential form has been chosen. The explicit expressions of \(\omega _{1}\) and \(\omega _{2}\), as well as of the coefficient of \(a^{(j)}\) and \(b^{(j)}\) at first and second order, can be found in Celletti et al. (2023). By computing \(\omega _{1}\) and \(\omega _{2}\) numerically, it is possible to observe that there are particular values of the reference inclination \(i_{*}\) for which they are commensurable: these are the inclinations of the so-called secular resonances for the geolunisolar problem (see for example Breiter (1999)), which will play a fundamental role in the upcoming stability analysis.
As in Sect. 2.2, for computational reason the sum in Eq. (23) has been truncated up to order \(N=12\).
The next step towards producing stability estimates via Nekhoroshev theorem consists in normalising the Hamiltonian in Eq. (23) to obtain an expression as in Eq. (22), where \(h_{0}\) contains only angle-independent terms and the size of \(h_{1}\) can be controlled with a suitable norm.
Let us start by considering the non-normalised sum in Eq. (23), and suppose to split it into the form
where \(\tilde{h}_{0}\) contains only the angle-independent terms in (23) and \(\tilde{h}_{1}\) contains all the others. If we suppose that the action values are bounded, it is clear that, from \(j=4\) on, the size of the angle-dependent summands decreases quadratically with the action’s bound; on the other hand, the purely trigonometric terms, as well as angle-dependent ones which are linear in the actions, are harder to control.Footnote 5 The normalisation algorithm performed in this case aims precisely to the elimination of such terms up to a certain order \(M\) (in the actual computation, \(M\) is set equal to 6) via a sequence of suitable Lie series transformations. The complete algorithm, whose extended description can be found in Celletti et al. (2023), leads finally to a new Hamiltonian
where, with an abuse of notation, the new action-angle variables are still called \(I_{i}\) and \(\phi _{i}\), \(i=1,2\). In Eq. (26), the normal part, composed by the linear part plus \(Z\), is composed by angle-independent terms plus other terms which could be angle-dependent but at least quadratic in the actions. As for the remainder term \(R\), it could contain terms which depend on \((\phi _{1},\phi _{2})\) and are constant or linear in the actions; nevertheless, provided the normalization algorithm converges (namely, the size of the coefficients of the remainder decreases in the process), such terms are small with respect to \(Z\).
The convergence of the normalization is a crucial issue of the overall procedure, which depends heavily on the non-commensurability of the initial frequencies \(\omega _{1}\) and \(\omega _{2}\); furthermore, such convergence influences also the final value of the frequencies, denoted by \(\tilde{\omega}_{1}\) and \(\tilde{\omega}_{2}\). The variation in such quantities is negligible whenever the normalisation converges.
The normalized Hamiltonian \(\mathcal {H}_{norm}\) is the starting point to obtain exponential stability estimates via non-resonant Nekhoroshev theorem, which we now recall in the version of Pöschel (1993), after some useful definitions.
Let us start by considering, in general, a Hamiltonian of the form
which is assumed to be real analytic in \((\boldsymbol {J},\boldsymbol {\theta})\in A\times \mathbb{T}^{n}\), \(A\subset \mathbb{R}^{n}\). Suppose also that the above Hamiltonian can be extended analytically to the set
where \(r_{0}\) and \(s_{0}\) are two positive real constants. As a last assumption, let us suppose that the Hessian matrix associated to \(h_{0}\) is bounded in \(A_{r_{0}}\), namely, that there exists a constant \(\mathcal {M}>0\) such that, denoted with \(\|\cdot \|_{o}\) the operator norm induced by the Euclidean one on \(\mathbb{R}^{2}\),
Given now an analytic function expressed as
we define the Cauchy norm of \(g\) as
where \(|\boldsymbol {k}|=|k_{1}|+\cdots +|k_{n}|\).
Theorem 1
Given \(\alpha , K>0\) suppose that \(D\subseteq A\) is a completely \(\alpha -K\)-nonresonant domain, namely,
Let \(a,b>0\) such that \(a^{-1}+b^{-1}=1\); if
then for every orbit of initial conditions \((\boldsymbol {J}_{0}, \boldsymbol {\theta}_{0})\in D\times \mathbb{T}^{n}\) one has
Once one has precise numerically computed values for all the quantities involved, one can use Theorem 1 to produce stability estimates for the actions. More precisely, in a non-resonant regime defined through the notion of \(\alpha -K\)-nonresonance, one can find an open set in \({\mathbb{R}}^{n}\) in which the actions are bounded for a time which is exponentially long in \(K\). We stress that such result is to be intended as local, in the sense that it holds for initial values for the actions in a subset \(D\) of \(A\). Numerical evidences (see the paragraph below) show how the cut-off value \(K\) satisfies a relation of the type \(K\sim \left (c_{1} |h_{1}|_{A,r_{0},s_{0}}\right )^{-c_{2}}\), \(c_{1}\) and \(c_{2}\) being two positive constants. Such behaviour is consistent with theoretical results (see for example Pöschel (1993)), and allows to conclude that the stability time is exponentially long with respect to the perturbation’s norm to some power.
Numerical results
To produce stability times through Theorem 1 for the secular geolunisolar model, it is necessary to set up an algorithm that, given reference values of the orbital elements, computes the quantities involved in the Theorem and finally, if the hypothesis (33) is satisfied, provides \(T_{stab}\) as in Eq. (34). In practice, our algorithm develops into the below steps.
-
1.
We start by fixing the constants \(a\), \(b\), \(r_{0}\), \(s_{0}\), whose value has been established by trials and errors, and could be possibly tuned to obtain optimal estimates. In particular, we impose \(r_{0}=s_{0}=0.1\), \(a=9/8\) and \(b=1/8\) (the choice of \(a\) and \(b\)’s values is the same one can find in Pöschel (1993)). Moreover, we fix a reference value of the semimajor axis \(a_{*}\), which, by virtue of the averaging process, is constant along every orbit.
-
2.
Fixed the values \((e_{*},i_{*})\), we compute numerically the expansion (23), to arrive, after the normalization, to the form (26). We stress that the final values of the frequencies \(\tilde{\omega}_{1}\), \(\tilde{\omega}_{2}\), as well as the actual size of the remainder term \(R\), depend heavily on the non-commensurability of \(\omega _{1}\) and \(\omega _{2}\), and then on the reference values \((e_{*}, i_{*})\). This means that different values of eccentricity and inclination could lead to completely different outcomes in terms of normalization. The Hamiltonian can be now splitted into an integrable part \(h_{0}(I_{1},I_{2})\) containing only the angle-independent terms plus a perturbation \(h_{1}(I_{1},I_{2},\phi _{1},\phi _{2})\) which contains all the other terms.
-
3.
We can now compute the quantities involved in Theorem 1: first of all, we define the actions’ set \(A\) as
$$ A=[I_{1}^{*}-0.1,I_{1}^{*}+0.1]\times [I_{2}^{*}-0.1,I_{2}^{*}+0.1], $$(35)\(I_{1}^{*}\), \(I_{2}^{*}\) being the actions corresponding to the reference values; one can then define \(D_{r_{0},s_{0}}\) as in Eq. (28) and
$$ \mathcal {M}=\sup _{(I_{1},I_{2})\in A_{r_{0}}} \|\nabla ^{2} h_{1}(I_{1},I_{2}) \|_{o}. $$(36)As for the nonresonance parameters \(\alpha \), \(K\), we search for their optimal values, provided condition (33) is satisfied, as follows: for every \(i=1, \dots , 50\) we compute
$$ \begin{aligned} &\alpha _{i}=\min _{ \substack{\boldsymbol {l}=(l_{1},l_{2})\in \mathbb{Z}^{2}\\|\boldsymbol {l}|\leq i}} \{\omega _{1} l_{1}+\omega _{2} l_{2}\}, \\ & r_{i}=\min \left \{ \frac{\alpha _{i}}{a \mathcal {M} i}\, r_{0}\right \}, \ \epsilon ^{*}_{i}= \frac{1}{2^{7}b}\frac{\alpha _{i}r_{i}}{i}. \end{aligned} $$(37)At this point, one can compute \(|h_{1}|_{A,r_{0},s_{0}}\) and check whether there exists \(i\in \{1, \dots ,50\}\) such that \(|h_{1}|_{A,r_{0},s_{0}}\leq \epsilon ^{*}_{i}\): if it happens, then one can take \(K\) as the maximal \(i\) such that the condition is verified, \(\alpha =\alpha _{K}\) and compute the stability time as in Eq. (34). On the other hand, since the sequence \(\{\epsilon ^{*}_{i}\}_{i=1}^{50}\) is clearly decreasing, if \(|h_{1}|_{A,r_{0},s_{0}}>\epsilon _{1}^{*}\) there is no hope for the theorem to be applied for the specific values \((a_{*},e_{*},i_{*})\) and any \(i\in \{1, \dots , 50\}\): in this case, we impose \(K=0\).
Figure 2 shows the numerical results obtained for semimajor axis’ values from \(11{,}000\text{ km}\) and \(19{,}000\text{ km}\) and \((e,i)\) ranging into a mesh of \([0,0.5]\times [0^{\circ},90^{\circ}]\) of step 0.1 in eccentricity and \(0.5^{\circ}\) in inclination. The color scale indicates the value of the stability time (in years) obtained, while the white region of such values of \((e_{*},i_{*})\) for which condition (33), using the proposed algorithm, does not hold. The red lines are put in correspondence of the known inclination-dependent resonances for the secular geolunisolar problem (see Hughes (1980)).
It is evident how the domain where the Theorem can be applied shrinks manifestly with \(a_{*}\), and, concurrently, the estimates on the stability times get worse. Moreover, an evident influence of the resonances comes out, since, even in the best case (i.e. for \(a_{*}=11{,}000\text{ km}\)), white regions around the corresponding inclinations appear.
The role played by the resonances in the overall procedure enters at two different levels: during the normalization process and, later, in the application of Theorem 1. We recall that, in the current formulation, resonances are detected by a commensurability relation between \(\omega _{1}\) and \(\omega _{2}\); for a more complete comparison on the relation between resonances expressed in \(\omega _{1}\), \(\omega _{2}\) and classical lunisolar ones, see (Celletti et al. 2023, Tables 1 and 2, Fig. 5).
As for the first normalization, one can check from the explicit expression of the coordinate changes used to remove the “unwanted” terms from the normal part (see Celletti et al. (2023) for all the details) that linear combinations of \(\omega _{1}\) and \(\omega _{2}\) appear at the denominator: whenever the frequencies are resonant, such denominators (the so called small divisors) approach zero, leading to an explosion in the remainder \(R\) and, subsequently, in the size of \(h_{1}\). We refer again to Celletti et al. (2023) for a detailed analysis of the convergence of the first normalization, including results on the change in the frequencies’ value during the process.
On the other hand, the simple fact that we are using a nonresonant version of Nekhoroshev theorem makes clear how having a commensurability relation at low order between \(\tilde{\omega}_{1}\) and \(\tilde{\omega}_{2}\) correspond to a value of \(\alpha \) (and, as a consequence, of the threshold \(\epsilon ^{*}\)) drastically low, making nearly impossible for the norm of \(h_{1}\) to remain below \(\epsilon ^{*}\).
The effect of the distance on the worsening of the results has a more complex reason, which can be explained, roughly, by the following heuristic argument: it can be shown that, after the normalization, the remainder \(R\) contains purely trigonometric terms whose size is comparable to the one of \(\left (C a_{*}^{5} \tan{i^{*}}\right )^{M}\), where \(C\) is a suitable constant and \(M\) is the normalization order, here put equal to 6. As a consequence, the size of these terms, which can not be controlled by taking a smaller domain in the actions, grows swiftly with \(a_{*}\) and whenever \(i_{*}\) approaches \(90^{\circ}\).
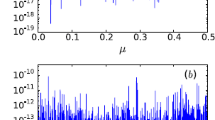
We conclude this section by providing an example which shows the behaviour of the computed value of the cut-off value \(K\) with respect to the perturbation’s norm \(|h_{1}|_{A,r_{0},s_{0}}\). Figure 3 shows the LogLog plot of the values of \(K\) and \(|h_{1}|_{A,r_{0},s_{0}}\) for \(a_{*}=13{,}000\text{ km}\), \(e_{*}=0.2\) and inclinations in a mesh of \([0^{\circ}, 90^{\circ}]\). It is evident a relation of the type
which is consistent with the expected theoretical results, and allows to conclude, as anticipated before, that the final estimates can be actually considered as exponentially long in the inverse of the perturbing function’s norm.

\(LogLog\) plot of the points \(\{|h_{1}|_{A,r_{0},s_{0}}, K\}\) for \(a_{*}=13{,}000\text{ km}\), \(e_{*}=0.2\) and \(i_{*}\in [0^{\circ},90^{\circ}]\). Figure adapted from Celletti et al. (2023)
2.4 Further considerations and conclusions
The techniques used in Sects. 2.2 and 2.3 are examples of how semi-analytical manipulations in a Hamiltonian framework could be used to gain information in the long-term dynamics of a body orbiting around Earth under the influence of the latter, Sun and Moon. Other examples of this kind can be found in the literature (King-Hele and Walker (1988), Celletti et al. (2017b), Rosengren and Scheeres (2013)). The first method, inspired by the work Steichen and Giorgilli (1997), provides stability times which, though very long (see Table 1), are linear with respect to the perturbation’s norm, and hold in quasi-circular orbits lying close to the Laplace plane. As for the second method, it produces estimates which are exponentially long with respect to the inverse of the perturbation’s size, showing all the potential of the Nekhoroshev theorem, which could be used also in higher dimensions; on the other hand, at present the domain in which the results are truly substantial is not particularly large (see Fig. 2). Nevertheless, we stress that the presence of regions of the phase space where the theorem can not be used in the proposed version does not imply that such regions are chaotic. As a matter of fact, different strategies to obtain an initial normal form may overcome the convergence problem, and, most of all, a finer analysis of the geometry of the resonances in the secular geolunisolar problem would allow to use Nekhoroshev theorem in its complete version, obtaining estimates valid in a resonant regime as well.
As for the model we chose to use, we stress that, for computational reasons, we are considering the influence of the geopotential only up the \(J_{2}\)-term. The overall analysis can be refined by taking also further terms in (4), like for example the ones corresponding to \(J_{2}^{2}\), \(J_{3}\) and \(J_{4}\), and it would be of great interest to understand whether and how much this modification changes the estimates. A comparison between the results presented in Sect. 2.3 and the ones one can obtain by considering this more complete model is presented at the end of Celletti et al. (2023), showing that, in the practical context on the satellites’ motion, the stability times obtained for the two models, though different, are so long with respect to the average operational lifetime that any change does not really affect the validity of the estimates.
3 Regular and chaotic motions in galactic billiards
The current Section resumes the results contained in De Blasi and Terracini (2022, 2023), Barutello et al. (2023) on the analysis of the refraction galactic billiard (see Sect. 1), a model aiming to provide a simplified description of the motion of a particle in an ellipsoidal galaxy having a central super-massive core.
Let us take a smooth open domain \(D \subset {\mathbb{R}}^{2}\), containing the origin, and consider the potential
where ℰ, \(\omega \), \(h\), \(\mu \) are positive constants representing respectively the energy and frequency of the outer harmonic oscillator, the difference in energy between inner and outer trajectories and the central body’s mass parameter. Starting from initial conditions on the interface \(\partial D\), the trajectories at zero energy induced by the inner potential are Keplerian hyperbolæ, while the outer ones are elliptic harmonic arcs. With a broken geodesics technique (see Seifert (1948)) we can construct complete trajectories in our system by patching together outer and inner arcs. The connection rule is given by the refraction Snell’s law described in Fig. 4, left: denoting with \(\alpha _{I}\) and \(\alpha _{E}\) respectively the angles of the inner and outer arcs connected at a point \(\boldsymbol {z}\in \partial D\) with respect to the normal direction to \(\partial D\) in \(\boldsymbol {z}\), the following relation must be satisfied
Geometrically, Eq. (40) translates in the conservation of the tangent component of the velocity after the transition.

Left: Snell’s refraction law. The angles \(\alpha _{E}\) and \(\alpha _{I}\) are the angles respectively of the outer and the inner arc with respect to the normal direction to \(\partial D\) in \(\boldsymbol {z}\). The two angles are connected by the relation (40). Right: concatenations from \(\boldsymbol {p}_{0}\) to \(\boldsymbol {p}_{1}\) with an outer and inner arc, for different positions of the transition point \(\boldsymbol {p}\). The left figure is adapted from Barutello et al. (2023)
The choice of this kind of connection rule is based on different arguments: first of all, from a physical point of view, it can be seen as a generalisation for non-constant potentials and non-straight interfaces of the classical Snell’s law for light rays. On the other hand, it has a rigorous and robust variational interpretation, which will be crucial in the whole forthcoming analysis. To explain it (see De Blasi and Terracini (2022) for further details), let us consider a concatenation of an outer and a inner arc that connects two points on the boundary \(\boldsymbol {p}_{0}\) and \(\boldsymbol {p}_{1}\), passing through a transition point \(\boldsymbol {p}\) (see Fig. 4, right). It is possible to associate to any of the two arcs, denoted for the moment by \(z_{E}(t)\) and \(z_{I}(t)\), the corresponding Jacobi lengths
where \(z_{E}(0)=\boldsymbol {p}_{1}\), \(z_{E}(T_{E})=z_{I}(0)=\boldsymbol {p}\) and \(z_{I}(T_{I})=\boldsymbol {p}_{1}\). Under suitable conditions, it can be proved that the outer (resp. inner) trajectory under the potential \(V_{E}\) (resp. \(V_{I}\)) arc connecting two points on the boundary is unique: as a consequence, the functions \(\mathcal {L}_{E}\) and \(\mathcal {L}_{I}\) depend only on the endpoints. The inner and outer Jacobi lengths can be combined to obtain the total Jacobi length of a concatenation. Making use of this quantity, it is possible to state Snell’s law in a variational way as follows: we say that the concatenation from \(\boldsymbol {p}_{0}\) to \(\boldsymbol {p}_{1}\) through \(\boldsymbol {p}\) satisfies Snell’s law at the transition point if and only if \(\boldsymbol {p}\) is a critical point for the total Jacobi length of the concatenation itself, that is,
Of course, an analogous reasoning applies whenever the transition is from inside to outside.
As customary in billiards theory, to study the two dimensional dynamics of the trajectories of the complete system it is possible to restrict to a discrete map which keeps track of the behaviour of a concatenation whenever it hits the boundary. This is the so-called first return map, which, starting from generic initial conditions on the boundary (position and velocity vector), summarises the behaviour of the generated trajectory after every concatenation of an outer and subsequent inner arc. To be more precise (see also Fig. 5), let us start by parametrising \(\partial D\) with a smooth, closed and simple curve \(\gamma :I\to {\mathbb{R}}^{2}\), \(\xi \mapsto \gamma (\xi )\), where \(I\subset {\mathbb{R}}\) is a suitable interval and take initial conditions on the boundary for an outer arc, \((\boldsymbol {p}_{0},\boldsymbol {v}_{0})\in \partial D\times {\mathbb{R}}^{2}\): such initial conditions are uniquely determined by a pair of one dimensional parameters \((\xi _{0},\alpha _{0})\), with \(\gamma (\xi _{0})=\boldsymbol {p}_{0}\) and \(\alpha _{0}\) the angle between \(\boldsymbol {v}_{0}\) and the outward-pointing normal unit vector to \(\gamma \) in \(\xi _{0}\). Once the initial conditions are fixed, we can follow the dynamics induced by the outer and then inner potential, taking into account the two refractions that occur entering in and exiting from \(D\) (see Fig. 5). At the end of such concatenation, one obtains final conditions \((p_{1},v_{1})\), which can be again parametrised through a pair of one dimensional quantities \((\xi _{1}, \alpha _{1})\), and can be used as initial conditions for a new outer arc. The above machinery can be then iterated to obtain a new concatenation.

First return map: starting from initial conditions \((\boldsymbol {p}_{0}, \boldsymbol {v}_{0})\), determined by the one-dimensional parameters \((\xi _{0},\alpha _{0})\), the trajectory is followed through an outer arc, a refraction from outside to inside, an inner arc and a refraction from inside to outside to find the final conditions \((p_{1},v_{1})\), defined by \((\xi _{1},\alpha _{1})\)
The map
is called first return map, and can be used to describe the dynamics of our billiard in the phase space, parametrised by the variables \((\xi ,\alpha )\), every time a complete concatenation of outer and inner arc is performed.
At the moment, we don’t make any assumption on \(D\), except for the smoothness of its boundary; on the other hand, as ordinary in billiards theory, the dynamical properties of the system depend crucially on the geometric features of \(\partial D\). The current Section aims to describe, from different points of view, such complex interdependence between the geometry of \(D\) and the dynamics of our billiard.
3.1 Regular motion: equilibria and invariant curves
Whenever a new dynamical system is taken into account, it is natural to start its analysis by searching for its equilibrium trajectories, as well as investigate their stability, using the tools of nonlinear analysis. In the formalism of the first return map, equilibrium trajectories of the two dimensional system correspond to fixed points for ℱ (see for example Fig. 6). In the case of refraction billiard, there is a particular class of equilibrium trajectories, called homothetic, whose existence is ensured provided very simple conditions on the boundary are verified: such trajectories result to be of paramount importance for the analysis of the model in many different circumstances.

Equilibrium trajectories in the refraction billiard. Left: concatenation of non-homothetic inner and outer arc that refract one into the other; the existence of this kind of trajectory will be proved analytically, in the case of a circular domain, in Proposition 4. Right: examples of homothetic equilibrium trajectories. Figures adapted from De Blasi and Terracini (2023), Barutello et al. (2023)
Let us suppose to have \(\bar{\xi}\in I\) such that:
If this happens, it is easy to show that the straight half-line from the origin in the direction of \(\gamma (\bar{\xi})\) is invariant under both inner and outer dynamics (note that, in the case of the inner dynamics, a Levi-Civita approach to regularise the collision at the origin has been employed, cfr. Levi-Civita (1906)), and it is not deflected by Snell’s law (see Fig. 6, right). Along the direction defined by \(\gamma (\bar{\xi})\) it is then possible to construct an equilibrium trajectory, called homothetic, which corresponds to a homothetic fixed point \((\bar{\xi},0)\) of the first return map ℱ. We highlight that, although a bouncing after the collision with the central mass might seem odd from a physical point of view, the analytic continuation of inner homothetic arcs after the collision allows to study in details the local dynamics around the singularity, giving a clear portrait of orbits which are close to collision, and then physically relevant. It is easy to observe that condition \((1)\) in (44) is equivalent to require that \(\bar{\xi}\) is a critical point for the function \(|\gamma (\cdot )|\), while condition \((2)\) can be described as a star-convexity property of the domain \(D\) with respect to the direction of \(\gamma (\bar{\xi})\). In the following, we will refer to parameters \(\bar{\xi}\) as in (44) as central configurations.
The first return map ℱ is clearly infinitely-many well defined for any point \((\bar{\xi}, 0)\), with \(\bar{\xi}\) central configuration; actually, it is possible to prove that it is well defined and differentiable in a whole neighbourhood of the point itself. It is then natural to continue the analysis of homothetic fixed points by investigating their linear stability, asking whether it depends on the geometrical properties of \(\partial D\) around \(\gamma (\bar{\xi})\) as well as on the physical parameters ℰ, \(h\), \(\omega \), \(\mu \). One can then consider the Jacobian matrix of ℱ in such points, given by
Although the explicit expression of ℱ is not known, using the implicit function theorem and knowing the analytic expression of the homothetic solutions it is possible to obtain a closed formula for its Jacobian: when \(\gamma \) is parametrised by arc length (i.e. \(|\dot{\gamma}(\xi )|=1\) for all \(\xi \in I\)), such expression is given by
where \(k(\bar{\xi})\) denotes the curvature of \(\gamma \) in \(\bar{\xi}\) (see Do Carmo (2016)). The analytic expression of \(D\mathcal {F}(\bar{\xi},0)\) is quite complicated, but it is easy to notice as it depends on both the geometric properties of \(\gamma \) up to second order and the physical parameters ℰ, \(\omega \), \(h\), \(\mu \). Let us note that, when \(D\) is a circle centered at the origin with radius \(R=|\gamma (\bar{\xi})|\), its curvature is always equal to \(1/R\): in such case, the terms \(\epsilon _{E}\) and \(\epsilon _{I}\) disappear, and the Jacobian reduces simply to the identity matrix. This fact is not surprising, as it is consistent with the fact that circular refraction billiards represent an integrable and highly degenerate class of examples. In this case, every radial initial condition (i.e. any point \((\xi ,0)\) in the \((\xi ,\alpha )\)-plane) defines a homothetic equilibrium trajectory, so that the homothetic fixed points are not isolated anymore, and form instead a straight line of fixed points in correspondence of \(\alpha =0\).
As for the general case, one can notice that the curvature of \(\gamma \) plays a role only in the \(\epsilon _{E/I}\) terms: for this reason, such terms can be considered as corrections induced by the geometry of \(\gamma \) with respect to the circular case.
The linear stability of \((\bar{\xi},0)\) as fixed point of ℱ can be inferred by the eigenvalues of \(D\mathcal {F}(\bar{\xi},0)\) (see Hirsch et al. (2013)). In particular, denoted by \(\Delta \) the discriminant of the characteristic polynomial associated to \(D\mathcal {F}(\bar{\xi},0)\), one has that
-
if \(\Delta >0\), then \((\bar{\xi},0)\) is a saddle;
-
if \(\Delta <0\), then \((\bar{\xi},0)\) is a center.
The case \(\Delta =0\) is highly degenerate: this is what happens in circular domains, and, in general, nothing can be said on the linear stability.
Starting from Eq. (46), it is possible to give an explicit formula for the discriminant \(\Delta \), which is given by
The sign of \(\Delta \) can be investigated numerically whenever one has an explicit expression for the curve \(\gamma \): in the following, we propose a thorough illustration of the elliptic case, which, in the framework of the mathematical billiards, represents a case study of great importance (see for example Takeuchi and Zhao (2024), Kaloshin and Sorrentino (2018)).
Let us suppose that \(\gamma \) describes an ellipse with center in the origin, semimajor axis equal to 1 and eccentricity \(e\), that is,
In this case the only four homothetic trajectories are in correspondence of \(\bar{\xi}^{(0)}=0\), \(\bar{\xi}^{(1)}=\pi /2\), \(\bar{\xi}^{(2)}= \pi \) and \(\bar{\xi}^{(3)}=3\pi /2\), and they are pairwise symmetric. For any of the corresponding homothetic points, it is then possible to compute \(D \mathcal {F}(\bar{\xi}^{(i)}, 0)\), \(i=0,\dots ,3\), and, consequently, the discriminants \(\Delta ^{(0)}, \dots ,\Delta ^{(3)}\). The explicit expressions of these quantities, as well as rigorous asymptotic analysis, is provided in (De Blasi and Terracini 2022, Sect. 1.6). Here, we limit ourselves to an example, which is of particular significance to show the consistency between analytical tools and numerical results. Let us take for example the numerically computed values of \(\Delta ^{(0)}\) and \(\Delta ^{(1)}\) displayed in Fig. 7, left, where we fixed \(\mathcal {E}=2.5\), \(\omega =\sqrt{2}\), \(\mu =2\), \(e=0.1\), and the inner energy \(h\) varies in \([0,150]\). It is clear that, while the homothetic in \(\bar{\xi}^{(0)}=0\) is always a saddle, the stability of \(\bar{\xi}^{(1)}=\pi /2\) changes when \(h\) increases: in the literature, as for example in Hirsch et al. (2013), phenomena where the dynamical properties of a map (stability of the fixed points, number of the latters, etc.) are referred to as bifurcations.

Left: values of the discriminants related to the central configurations \(\bar{\xi}^{(0)}\) and \(\bar{\xi}^{(1)}\) for \(\mathcal {E}=2.5\), \(\omega =\sqrt{2}\), \(\mu =2\), \(e=0.1\) and increasing values of \(h\). Right: orbits of the first return map ℱ in a neighborhood of \(\bar{\xi}^{(1)}\) for the same parameters’ values. Figures adapted from De Blasi and Terracini (2022)
We can compare the left and right side of Fig. 7, which shows the orbits of the first return map in a neighborhood of \((\pi /2,0)\) for different values of \(h\) close to the one at which \(\Delta ^{(1)}\) changes sign. One can clearly see as the fixed point, which initially is a center, changes its stability, becoming a saddle, and, for increasing values of \(h\), leading to the formation of a new non-homothetic, 2-periodic point.
The homothetic equilibrium trajectories analysed up to now are of great importance also for the further analysis, and in particular in Sect. 3.2; nevertheless, there exists another class of (two-periodic) equilibrium trajectories whose existence can be derived by purely analytic arguments: brake orbits composed by a pair of outer homothetic arcs connected by an inner hyperbola (see Fig. 8, left). Such kind of trajectories can appear whenever an inner arc refracts in both sides in radial directions, and their existence can be showed analytically by means of a free fall method. The idea is to construct an univariate function that, given the initial conditions corresponding to an homothetic outer arc, follows the generated trajectory until it exits again from \(D\) and returns the angle between the subsequent outer arc and the radial direction in the exit point (Fig. 8, right). In this way, provided the above function (called free fall map) is well defined (and, possibly, differentiable), the search for two periodic brake orbits translates in searching for zeroes of a continuous function.

Left: example of brake two-periodic trajectory. Right: construction of the free fall map: given a direction defined by \(\theta \), it returns the angle \(\delta \) between the refracted outer arc and the corresponding radial direction. Figures adapted from De Blasi and Terracini (2022)
The good definition of the free fall map follows from a more general geometric property of elliptic boundaries. Since this result is interesting also by itself, we write it down in the following Proposition.
Proposition 2
(De Blasi and Terracini 2022, Proposition 6.3) Let \(D\) be an elliptic domain whose boundary is parametrised as in (48), with \(e\in [0,1/\sqrt{2})\). Then, for any \(\mathcal {E}, h, \mu >0\), every Keplerian arc of energy \(\mathcal {E}+h\) and mass parameter \(\mu \) intersects \(\partial D\) at most in two points.
Let us remark that \(1/\sqrt{2}\simeq 0.707\): the above Proposition holds then for a wide class of ellipses, not necessarily close to a circle. Whenever \(e\in [0,1/\sqrt{2})\) the free fall map can be proved to be well defined, and we prove the existence of brake two-periodic trajectories for suitable values of the physical parameters.
Theorem 3
(De Blasi and Terracini 2022, Theorem 6.4) Fixed every \(\mathcal {E},\omega >0\) such that \(\omega ^{2}>\mathcal {E}\) and any ellipse with the center at the origin, semimajor axis equal to 1 and \(e\in [0,1/\sqrt{2})\), if \(\mu \) and \(h\) are sufficiently large, then the first return map admits at least four two-periodic brake trajectories.
The results proposed until now hold in a local sense for quite generic domains and, in a more global setting, in the special case of elliptic domains. In the forthcoming pages we will try to provide global results for a more general class of domains: it is the case of the close to circle ones, which will be analysed through the powerful tools brought forth by perturbation theory.
It is already clear from the discussion above that the shape of the domain \(D\) is of fundamental importance to infer the properties of billiard maps; in the circular case, this becomes evident, as the central symmetry of the domain has radical consequences on ℱ. The system, in such case, results to be globally well defined, completely integrable and admits orbits of any rotation number within a certain interval.
When the domain \(D\) is sufficiently close to a circle, one can ask whether some of these properties are still maintained. To try to answer this question, one can take advantage of tools of perturbation theory and general facts holding for area preserving maps (for a wide dissertation on the subject, see Golé (2001)). Such instruments require a definition of the analytical framework we are working in deeper than the one described in the previous Sections, in particular involving the so-called generating function.
Let us assume again that the boundary of \(D\) is parametrised by a curve \(\gamma \): for the sake of simplicity, we will assume that \(\gamma \) is \(2\pi \)-periodic, and, with an abuse of notation, we still denote with \(\gamma \) the periodic extension of the curve, namely, \(\gamma :{\mathbb{R}}_{/2\pi Z}\to {\mathbb{R}}^{2}\), where \({\mathbb{R}}_{/2\pi {\mathbb{Z}}}\) denotes the \(2\pi \)-periodic torus. Let us now take the function
where \(\mathcal {L}_{E}\) and \(\mathcal {L}_{I}\) are the outer and inner Jacobi distances as defined in Eq. (41). By means of the implicit function theorem, the parameter \(\tilde{\xi}\) can be expressed as a function of \(\xi _{0}\) and \(\xi _{1}\) from the relation
provided a suitable non degeneracy condition holds. Recalling the variational interpretation of Snell’s law, one can notice that, given two points \(\boldsymbol {p}_{0}=\gamma (\xi _{0})\) and \(\boldsymbol {p}_{1}=\gamma (\xi _{1})\), the generating function \(G\) returns the Jacobi length of the concatenation that connects \(\boldsymbol {p}_{0}\) to \(\boldsymbol {p}_{1}\) with an outer and inner arc, and trespasses the boundary precisely at the point \(\boldsymbol{ \tilde{p}}=\gamma (\tilde{\xi})\) where the refraction law is satisfied by the arcs. The good definition of \(G\), as well as its differentiability, is not always guaranteed, and depends on \(D\).
Generating functions are commonly used when dealing with billiards (see also Tabachnikov (2005)), since the first return map, in a suitable set of canonical action-angle variables, can be implicitly expressed in terms of derivatives of \(G\). In particular, one can define the canonical actions conjugated to the parameters \(\xi _{0}\), \(\xi _{1}\)
Such quantities, which in the following will replace the angles \(\alpha _{0}\), \(\alpha _{1}\) in the construction of a first return map, have in turn a geometrical interpretation, given by (see De Blasi and Terracini (2023))
Equation (51) translates in the fact that, whenever the initial and final points of a concatenation are known, the initial and final actions \(I_{0}\) and \(I_{1}\) (and, as a consequence, the angles \(\alpha _{0}\) and \(\alpha _{1}\)) can be computed from the generating function’s derivatives. Starting from this, it is possible to reconstruct the first return map in terms of the variables \((\xi _{0},I_{0})\) by means again of the implicit function theorem: under suitable hypotheses one can invert the first relation in (51) to obtain \(\xi _{1}\) as a function of \(\xi _{0}\), and \(I_{0}\), and then define the first return mapFootnote 6 as
The good definition of ℱ in suitable regions of \({\mathbb{R}}_{/2\pi {\mathbb{Z}}}\times {\mathbb{R}}\) is not always ensured, and has to be verified case by case. In the following, we will propose the analysis of the dynamics induced by either a circular or a quasi-circular domain, using the variables \((\xi _{0},I_{0})\).
Let us start by supposing that \(D\) is a circle of radius 1, whose boundary is parametrised by \(\gamma (\xi )=(\cos \xi ,\sin \xi )\), \(\xi \in {\mathbb{R}}_{/2\pi {\mathbb{Z}}}\): in this case, both the potentials and the boundary are centrally symmetric, and, geometrically, this translates in the conservation of the angle \(\alpha \) after every concatenation of outer and inner arc (see Fig. 9, left). Taking advantage of this fact it is possible to give an explicit formulation for the first return map in this case, given by
where \(I_{c}=\sqrt{\mathcal {E}-\omega ^{2}/2}\). Equation (54) has been obtained by means of analytical and geometrical reasoning, coming for classical results of Celestial Mechanics as well; the detailed computations can be found in De Blasi and Terracini (2023). We can observe that \(\mathcal {F}^{(c)}\) is in the form of a shift map, that is, a map that at every iterate operates a change in the angle which depends only on \(I_{0}\) by keeping constant the action. This is a direct consequence of the rotational invariance of the problem in the circular case, and shows as the action, once fixed by the initial conditions, is an integral of the motion of the system. For this reason, we can say that, in the circular case, the first return map is completely integrable, since it is a two-dimensional discrete map and has two conserved and independent quantities. The shift in the angle is a \(C^{1}\) function of \(I_{0}\), and can be splitted into two terms: \(\theta _{E}\) represents the angle displacement after the outer arc, while \(\theta _{I}\) is the shift in the angle after the Keplerian inner arc (see Fig. 9). We can clearly say that \(\mathcal {F}^{(c)}\) is globally well defined in \({\mathbb{R}}_{/2\pi {\mathbb{Z}}}\times (-I_{c}, I_{c})\); moreover, one can check that, for any \(I\in (-I_{c}, I_{c})\), one has that \(\theta '_{E}(I)>0\) and \(\theta _{I}'(I)<0\).

Left: conservation of the angle \(\alpha \) in the circular case. Right: Outer and inner shift in the circular case. By virtue of the central symmetry of the overall system, they depend only on \(I_{0}\) and not on \(\xi _{0}\)
The first problem we want to address in the circular case is the possible presence of periodic orbits; to do this, let us introduce the concept of rotation number (see Golé (2001)).
Definition 1
Given an initial point \((\xi _{0}, I_{0})\in {\mathbb{R}}_{/2\pi {\mathbb{Z}}}\times (-I_{c}, I_{c})\), let us denote the (backward and forward) orbit generated by it through \(\mathcal {F}^{(c)}\) as the sequence \(\left (\xi _{k}, I_{k}\right )_{k\in {\mathbb{Z}}}=\left ( \left ( \mathcal {F}^{(c)}\right )^{k}(\xi _{0},I_{0})\right )_{k\in {\mathbb{Z}}}\). Using this notation, the (forward) rotation number associated to the orbit is given by
Although the above definition holds in general, in the circular case the rotation number depends only on \(I_{0}\) and is simply given by the shift \(\theta _{E}(I_{0})+\theta _{I}(I_{0})\).
Orbits with \(2\pi \)-rational rotation number can be periodic, in the sense that, supposing \(\rho (\xi _{0},I_{0})=2\pi p/q\), one can a \((p,q)\)-periodic orbit such that
on the other hand, whenever \({\theta _{E}(I_{0})+\theta _{I}(I_{0})}\notin {\mathbb{Q}}\), the corresponding orbit covers densely the invariant line \(\{(\xi , I_{0})\ |\ \xi \in {\mathbb{R}}_{/2\pi {\mathbb{Z}}}\}\) in the \((\xi ,I)\)-plane (see Fig. 10). The line \(\{(\xi , 0)\ |\ \xi \in {\mathbb{R}}_{/2\pi {\mathbb{Z}}}\}\), although still invariant, represents an exception to the dichotomy between periodic (but moving) and dense orbits: it corresponds to all the initial conditions for the homothetic fixed points, and it is then covered in a continuum of points with rotation number equal to 0. The following Proposition resumes the results obtained in the circular case in terms of existence of (periodic and non-periodic) orbits with fixed rotation number.

Orbits of the refraction galactic billiard in the circular case, taking into account the physical parameters’ values \(E=7\), \(\omega ^{2}=3\), \(h=2\) and \(\mu =15\). The orbit lie on horizontal invariant lines with \(I=const\), and could be either periodic (the dotted lines) or cover densely the line (the continuous lines). A particular case is given by the invariant line \(I=0\), which is covered in homothetic fixed points. Figure adapted from De Blasi and Terracini (2023)
Proposition 4
(De Blasi and Terracini 2023, Propositions 4.9 & 4.10) There exists a constant \(C\in (0,\pi )\), which depends on the physical parameters ℰ, \(h\), \(\mu \) and \(\omega \), such that for every \(\rho \in (-C,C)\) there exists an action value \(I\in (0,I_{c})\) for which, for every \(\xi _{0}\in {\mathbb{R}}_{/2\pi {\mathbb{Z}}}\), one has \(\rho (\xi _{0}, \pm I)=\rho \). In particular, for any \(p,q\in {\mathbb{Z}}\) such that \(2\pi p/q\in (-C,C)\), there exist at least two \((p,q)\)-periodic orbits starting at any \(\xi _{0}\in {\mathbb{R}}_{/2\pi {\mathbb{Z}}}\).
Furthermore, for an open set of values of the physical parameters (that is, an open set in the \((\mathcal {E}, \omega , \mu , h)\)-space opportunely defined), there exist at least two non-homothetic fixed points of \(\mathcal {F}^{(c)}\).
Note that the second part of Proposition 4 proves analytically the existence of non-homothetic fixed points in the circular case, as the one displayed in Fig. 6, left. Once the analysis of the unperturbed case has been carried on, one can ask whether and under which conditions Proposition 4 continues to hold when we are dealing with close to circular domains. The class of the quasi-circular domains we are taking into account is obtained by performing a radial deformation of the boundary depending on a generic smooth function and on a parameter \(\epsilon \), namely,
where \(f(\xi , \epsilon )\) is a one-valued function smooth in both variables and \(C_{\epsilon}>0\) is arbitrarily large. In this way, for any \(\epsilon >-1\) the parameter \(\xi \) still represents the angle between the corresponding point \(\tilde{\gamma}(\xi ;\epsilon )\) and the \(x\)-axis. We will refer as \(D_{\epsilon}\) to the domain whose boundary is parametrised by \(\tilde{\gamma}(\cdot ; \epsilon )\).
In general, when \(\epsilon \neq 0\) the central symmetry of the circular case breaks, and we are no longer able to provide an explicit expression for the first return map on \(\partial D\). Nonetheless, it is possible to prove an analogous of Proposition 4, by using a more powerful set of tools, coming from the general theory of area preserving maps.
First of all, we have to ensure that ℱ is still well defined on the perturbed domain, at least in a subset of the initial conditions. This is true provided \(f\) is regular enough and \(\epsilon \) is sufficiently small.
Proposition 5
(De Blasi and Terracini 2023, Lemma 4.4 & Proposition 5.6) Suppose that \(f\in C^{k}({\mathbb{R}}_{/2\pi {\mathbb{Z}}})\), \(k\geq 2\), and define \(\mathcal {J}\) as the set of all the values \(I\in (-I_{c}, I_{c})\) such that \(\theta '_{E}(I)+\theta '_{I}(I)=0\). Then \(\mathcal {J}\) is finite and for every \([a,b]\subset (-I_{c}, I_{c})\setminus \mathcal {J}\) and \(\epsilon \) sufficiently small the perturbed first return map on \(D_{\epsilon}\), denoted with
is well defined in \({\mathbb{R}}_{/2\pi {\mathbb{Z}}}\times [a,b]\) and of class \(C^{k-2}\). Moreover, it is area preserving and it holds
for every \((\xi _{0},I_{0})\in {\mathbb{R}}_{/2\pi {\mathbb{Z}}}\times [a,b]\).
In general, two-dimensional area preserving maps for which (59) holds are called twist maps: such property will be important for the forthcoming analysis. By continuity with respect to \(\epsilon \), whenever Proposition 5 holds the map \(\mathcal {F}(\cdot , \cdot ; \epsilon )\) can be written as a perturbation of \(\mathcal {F}^{(c)}\) of the form
where \(A\) and \(B\) are two unknown functions of class \(C^{k-2}\) and tend to the constant zero-function whenever \(\epsilon \to 0\) in the \(C^{k-2}\)-norm.
Now that we have defined the first return map, as well as its domain, for quasi-circular billiards, we can build up a proving algorithm, which, taking advantage of some general results for area preserving maps, will ensure the existence of orbits with fixed rotation number also in the perturbed setting.
To do this, we will use two powerful results of nonlinear analysis: Poincaré-Birkhoff theorem and Aubry-Mather one. In general (for a more rigorous explanation, see Golé (2001)), these theorems apply to an area-preserving twist homeomorphism on an annulus \({\mathbb{R}}_{/2\pi {\mathbb{Z}}}\times [a,b]\), which preserves the boundaries \({\mathbb{R}}_{/2\pi {\mathbb{Z}}}\times \{a\}\) and \({\mathbb{R}}_{/2\pi {\mathbb{Z}}}\times \{b\}\) with rotation numbers \(\rho _{a}\) and \(\rho _{b}\). As for Poincaré-Birkhoff theorem, it focuses on the periodic case, claiming that for any \(2\pi \)-rational number \(\rho \in (\rho _{a},\rho _{b})\) there are at least two periodic orbits whose rotation number is precisely \(\rho \). Aubry-Mather theorem extends the result to any real number in the interval \((\rho _{a},\rho _{b})\), claiming the existence of at least one orbit for any of them.
Before applying these results, it is necessary to construct an invariant set of \(\mathcal {F}(\cdot ,\cdot ; \epsilon )\) where the map is surely well defined, area preserving and twist and whose boundaries are invariant curves for ℱ. To do this, we shall take advantage of the celebrated KAM theorem (see Möser (1962)), an extremely powerful result in perturbation theory that ensures the persistence of suitable invariant curves under small changes in a shift map as in (54).
The overall proving scheme towards the final result can be resumed as follows:
-
we construct an invariant set \(\mathcal {K}\) by means of KAM theorem. More precisely, we prove that for \(\epsilon \) sufficiently small there exist two curves over the \(\xi \)-axis which are invariant under \(\mathcal {F}(\cdot ,\cdot ; \epsilon )\) and have irrational rotation number. The set \(\mathcal {K}\) is precisely the region of the \((\xi ,I)\)-plane bounded by these two curves (see Fig. 11);
Fig. 11 
Construction of the invariant set \(\mathcal {K}\) for the perturbed first return map \(\mathcal {F}(\cdot ,\cdot ; \epsilon )\) in the \((\xi ,I)\)-plane. The curved solid lines are the invariant curves for the perturbed dynamics, whose existence is ensured by KAM theorem, with rotation number \(\rho _{a}\) and \(\rho _{b}\). The dashed straight lines are the corresponding orbits in the unperturbed dynamics
-
with a suitable change of coordinates, we will deform \(\mathcal {K}\) to put it in a form of an annulus \({\mathbb{R}}_{/2\pi {\mathbb{Z}}}\times [a,b]\): in the new coordinates, the perturbed map ℱ satisfies the hypotheses of both Poincaré-Birkhoff and Aubry-Mather theorems;
-
we apply the two theorems to obtain, finally, our existence result.

Following the above scheme, it is possible to prove Theorem 6, which represents the core result of De Blasi and Terracini (2023).
Theorem 6
(De Blasi and Terracini 2023, Theorem 5.20) Let us suppose that \(f\), defined as in (57), is of class \(C^{k}\), with \(k>5\). Let us define \(E_{1}, \dots , E_{N}\) as the connected components of \((-I_{c}, I_{c})\setminus \mathcal {J}\), and, fixed any \([a_{i},b_{i}]\subset E_{i}\) for every \(i=1, \dots , N\), set \(\theta _{-}^{i}\) and \(\theta _{+}^{i}\) as the rotation numbers for the unperturbed dynamics for \(I_{0}=a_{i}\) and \(I_{0}=b_{i}\) (for simplicity, let us assume that \(\theta _{-}^{i}<\theta _{+}^{i}\)). For any \(i=1, \dots , N\), let us fix \(\rho _{\pm}^{i}\) two DiophantineFootnote 7numbers such that \(\theta _{-}^{i}<\rho _{-}^{i}<\rho _{+}^{i}<\theta _{+}^{i}\). Then there exists \(\bar{\epsilon}>0\) such that, for every \(\epsilon \in {\mathbb{R}}\), \(|\epsilon |<\bar{\epsilon}\), and every \(\rho \in (\rho _{-}^{i}, \rho _{+}^{i})\) there is at least \(k\) orbits for the perturbed map with rotation number \(\rho \), where \(k\) is the number of intervals \((\rho _{-}^{i}, \rho _{+}^{i})\), for different \(i\), in which \(\rho \) is contained. Moreover, if \(\rho \) is \(2\pi \)-rational, then the orbits are \(2k\) and they are periodic.
Although technical in its set up, the meaning of the theorem is that, restricting suitably the set of rotation numbers and taking domains which are sufficiently regular and close to a circle, the existence of orbits with fixed \(\rho \), including periodic ones, is guaranteed.
The existence of a wide variety of periodic orbits for a non-circular case is a highly nontrivial results, and can be interpreted as a strong hint of the presence of a complex dynamics, which might be chaotic. This is precisely the topic of Sect. 3.2, where we will search for conditions on the domain’s shape under which it is possible to prove analytically the chaoticity of the model.
3.2 The onset of chaos in galactic refraction billiards
In the current section, the problem addressed is the possible chaoticity of our model, and, in particular, the existence of simple, geometrical conditions on \(D\) that ensure that the system satisfies a mathematically rigorous definition of chaos.
Such question, which in some sense was the first reason to motivate us in investigating the galactic refraction model, comes natural while observing some of the simulations provided in De Blasi and Terracini (2022) (see also Fig. 12). At least in the particular case of an ellipse having its center at the origin it is possible to observe diffusive orbits around the homothetic points on the \(\xi \)-axis, providing a clear evidence of chaotic behaviour, in a subset of the phase space.

Numerical evidences of chaotic phenomena in the galactic refraction billiard. The orbits correspond to the dynamics induced by an elliptic domain with eccentricity 0.05 and the physical parameters’ values \(\mathcal {E}=20\), \(\omega =1\), \(\mu =0.13\) and \(h=40\). Figure adapted from De Blasi and Terracini (2022)
Of course, computer simulations are not enough to prove the actual chaoticity of the model, as numerical instabilities can get in the way and lead to possibly non-accurate deductions. It is then important to go further with a rigorous proof, to show analytically how chaotic phenomena can occur under precise hypotheses.
A first problem one has to deal with is which definition of chaos it is convenient to take into account: roughly speaking, a dynamical system is considered chaotic whenever it is sensitive to changes in the initial conditions. More precisely, when, moving from a given point, the trajectories’ behaviour becomes unpredictable, potentially covering the whole phase space. From a mathematical point of view, there are many different ways to explicitly describe such concept (see for example Hasselblatt and Katok (2003)): in the current paper, we will use Devaney’s definition of topological chaos, presented in full details in Devaney (2003).
The main result regarding chaotic behaviour in a galactic refraction billiard, presented in Barutello et al. (2023), resumes in finding a geometrical condition on the boundary, called admissibility, which ensures the existence of a topologically chaotic subsystem for high enough inner energies.
Definition 2
Let us take a domain \(D\) containing the origin, and, taking \(\gamma :I\to {\mathbb{R}}^{2}\) as a parametrisation of \(\partial D\), suppose that it is at least \(C^{2}\). The domain \(D\) is termed admissible if there are at least two nondegenerate and non-antipodal central configurations, namely, if there exist \(\xi _{1},\xi _{2}\in I\) as in Eq. (44) which are strict maxima or minima for the function \(|\gamma (\cdot )|\) and such that \(\gamma (\xi _{1})\) and \(\gamma (\xi _{2})\) are not collinear with the origin (see Fig. 13).

Left: example of admissible domain. Here, one can find two central configurations, as in Definition 2, which are strict maxima or minima for the distance from the origin restricted to \(\partial D\) (hence nondegenerate critical points). Center and right: examples of non admissible domains. In the first case, a circle whose center is at the origin admits infinitely-many central configurations, but none of them are nondegenerate. On the other hand, an ellipse with one of the foci at the origin admits two nondegenerate central configurations, but they are antipodal
Theorem 7
(Barutello et al. 2023, Theorem 4.7) Let \(D\) be an admissible domain as in Definition 2. Then, if the inner energy is high enough, the galactic refraction billiard is chaotic, in the sense that it admits a topologically chaotic subsystem.
While in Barutello et al. (2023) the proof of Theorem 7 is explained in details, here we limit ourselves in pointing out that such chaotic subsystem is obtained by conjugation with the Bernoulli shift, achieved by constructing a suitable symbolic dynamics (see Devaney (2003)), which is well defined in a subset of the initial conditions and whenever the inner energy is high enough with respect to the outer one.
For the sake of completeness, let us briefly resume the main ideas behind such construction. In general, we say that a dynamical system \(F:A\to A\), \(A\) being the set of initial conditions, admits a symbolic dynamics whenever there exists a surjective and continuous projection map \(\Pi :A\to \{1,\dots ,n\}^{{\mathbb{Z}}}\), \(n\geq 1\), such that the diagram

commutes, where the function \(\sigma \) is the Bernoulli shift: given a sequence in \(\{1,\dots ,n\}^{{\mathbb{Z}}}\), \(\sigma \) moves any of its elements on the right.
In practice, constructing a symbolic dynamics corresponds to encoding the forward and backward orbits of \(F\) into sequences of symbols, whose geometrical and physical meaning depends by the model itself. This fact is particularly important when \(\Pi \) is bijective: in this case, we say that our system is topologically conjugated with \(\sigma \), and the one-to-one correspondence between \(F\)-orbits and bi-infinite sequences of symbols allows to conclude that \(F\) is chaotic.
In the case of galactic billiards, our aim is to construct a topological conjugacy between the first return map \(\mathcal {F}:(\xi _{0},\alpha _{0})\mapsto (\xi _{1},\alpha _{1})\), possibly restricted to a subsystem, and the Bernoulli shift on a suitable set of sequences. The map \(\Pi \) keeps tracks of the points where subsequent concatenations of outer and inner arcs, and in particular the ones that remain close to the homothetics, intersect the boundary. With reference to Fig. 14, we proceed as follows: given an admissible domain, suppose that it admits \(m\) central configurations \(\xi _{1},\dots ,\xi _{m}\), where \(m\geq 2\) by definition. We then construct \(U_{1},\dots ,U_{m}\subset \partial D\) suitable neighborhoods of \(\gamma (\xi _{1})\), …, \(\gamma (\xi _{m})\), and say that a trajectory starting with initial conditions \((\xi _{0},\alpha _{0})\) realizes the word \(\underline{s}\in \{1,\dots ,m\}^{{\mathbb{Z}}}\) if and only if it crosses \(\partial D\) only in \(\cup _{i=1}^{m}U_{i}\) and in the order prescribed by \(\underline{s}\) itself: in such case, we define the projection \(\Pi (\xi _{0},\alpha _{0})=\underline{s}\). Putting some restrictions on the neighbourhoods \(U_{i}\) as well as on the bi-infinite sequences in \(\{1,\dots ,m\}^{{\mathbb{Z}}}\), one can prove that:
-
there exists a set \(X\) of initial conditions \((\xi _{0},\alpha _{0})\) for which \(\Pi \) is well defined, that is, the backwards and forwards trajectories with initial conditions \((\xi _{0},\alpha _{0})\in X\) cross \(\partial D\) close to a central configuration (it is said that such trajectories shadow the homothetic ones);
-
under the hypotheses of nondegeneracy and non-antipodality of central configurations and for \(h\) sufficiently large, \(\Pi \) is bijective and continuous on \(X\). Hence, \(\mathcal {F}_{|_{X}}\) is topologically conjugated to Bernoulli shift, thus chaotic. To prove the surjectivity of the map, we shall use Poincaré-Miranda theorem (see Miranda (1940)), a topological fixed point result, and of the variational characterisation of refracted arcs.
In Barutello et al. (2023), a thorough analysis on the admissibility condition, including results that still hold when some of the requirements are weakened, is carried on. Furthermore, conditions on the bi-infinite sequences which lead to a non-collisional dynamics (namely, whose trajectories do not collide with the central mass) are detected.

Graphical representation of the projection map \(\Pi \) between refraction billiards’ trajectories and bi-infinite sequences of symbols. Here, one has \(m=3\) nondegenerate central configurations, around which the neighbourhoods \(U_{i}\), \(i=1,2,3\) have been constructed. The periodic trajectory displayed realizes the periodic word \(\underline{s}=(\dots ,1,2,3,1,2,3,\dots )\)
Although Barutello et al. (2023) is focused on the case of a refractive galactic billiard, it can be proved that a result analogous to Theorem 7, with the same admissibility condition, holds in the class of Kepler reflective billiards. In this case, the chaoticity result represent an interesting complement of the one obtained in Panov (1994) and Takeuchi and Zhao (2024). Here it is shown as that a Kepler reflective billiard whose boundary is a focused ellipse (i.e. an ellipse with one of the foci put at the origin, see Fig. 13, left) induces an integrable dynamics.
On one hand, Takeuchi and Zhao’s result is completely coherent with Theorem 7, since a focused ellipse is not an admissible domain according to Definition 2 (it indeed has two nondegenerate central configurations, parallel to the \(x\)-axis, but they are antipodal). On the other hand, the presence of a transition between integrable and chaotic systems by simply translating the boundary is a nontrivial fact that is worthy of a further investigation. In Barutello and De Blasi (2023), we start by proving analytically that elliptic (galactic refraction and Kepler reflection) billiards are almost always chaotic, provided the inner energy is sufficiently large. More precisely, fixed a non-circular elliptic shape with any eccentricities, it can be put almost everywhere with respect to the origin (keeping 0 in its interior) to have an admissible domain.
We stress how the geometric condition we called admissibility is only a sufficient condition ensuring chaos for large inner energies: it is then natural to ask what happens when such condition is violated but there are no evidences of integrability. In such case, one may ask themselves whether the limit of our proof is only constructive, in the sense that, taking a different projection map, some of the admissibility conditions can be weakened while still obtaining chaos. This will be the subject of a forthcoming paper.
We conclude this Section with a final comparison between our result with the one found in Delis et al. (2015), where a continuous potential given by the superposition of Keplerian and harmonic contribution is considered. In that case, the authors estimated the Lyapunov exponents associated to the model to be positive, finding evidences of chaotic behaviour in the continuous case as well.
4 Conclusions and further perspectives
This paper aimed to show the potential of analytical and semi-analytical techniques when applied to the investigation of dynamical systems coming from Celestial Mechanics, by presenting two examples: the first on a planetary scale and the second on a galactic one.
The first problem addressed was the production of stability estimates for the motion of a small body moving around the Earth in the so-called geolunisolar model: in this context, stability times up to which the variation of the orbital elements of a given geocentric orbit have been computed. The results have been obtained by means of two different techniques. The first, based on normal form theory, provided stability times of the order of \(10^{4}\) years for the quantity \(\mathcal {I}=\sqrt{\mu _{E} a}\sqrt{1-e^{2}}(1-\cos{i})\), \(e\) and \(i\) being respectively the eccentricity and the inclination of the orbiting body, which hold for quasi-circular and quasi-equatorial initial trajectories. The second method, based on Nekhoroshev theorem, finds its application on a wider set of initial conditions in terms of eccentricities and inclinations; as for the semimajor axis, the results in this case hold for a strip in MEO from 11,000 to 19,000 km, with stability times that, starting from being very long (\(10^{5}\) years) for low distances, tend to decrease with the altitude. The reason for such worsening in the estimates can be found in the convergence of the constructive algorithm used, and could be potentially improved. On the other hand, another fact which worsens our estimates is the presence of lunisolar resonances: in such case, a certain improvement could be achieved by considering Nekhoroshev theorem in its complete form instead of the nonresonant one, and proceeding with a careful analysis of the secular geolunisolar Hamiltonian whenever a resonance occurs.
We stress that the approach presented in Sect. 2 could be potentially used to provide stability estimates in any gravitational system where small masses orbit around a central extensive body, of which the approximated shape (and, as a consequence, the corresponding gravitational potential) is known, even in presence of third body perturbations.
As for the second model, it has been studied with analytical techniques coming from billiards’ and, more generally, classical dynamical systems’ theory. In this case, many results regarding the presence of equilibrium, periodic and quasi-periodic orbits are provided, along with evidences that, under suitable conditions, the central mass acts as a scatterer, deflecting our particle in a chaotic, an somehow unpredictable, way.
In general, billiards where two differential potentials are coupled through a refraction interface can be used as a simplified model to study any complex dynamical system whose behaviour presents different regimes, for example depending on the particle’s position; in such general case, the same formalism, as well as the same techniques, presented in Sect. 3 can be used.
Data Availability
Data sets generated during the current study are available from the corresponding author on reasonable request.
Code Availability
Code used during the current study is available from the corresponding author on reasonable request.
Notes
In the current paper, unless otherwise specified, the norm \(|\cdot |\) denotes the Euclidean norm in \({\mathbb{R}}^{N}\).
We point out that, in principle, the variables \((I_{1},I_{2}, \phi _{1}, \phi _{2})\) are not the same as in (11); nevertheless, since the new variables are obtained by means of near-identity canonical transformations, they are the sum of the original ones and short period small variations, which do not affect their secular stability.
This particular choice for the threshold value can be explained in the context of De Blasi et al. (2021b). In particular, it has been made in order to make the estimates on the geolunisolar model consistent with the ones obtained for the simple \(J_{2}\) model, which here are not mentioned. For the details, see (De Blasi et al. 2021b, Sect. 5.2).
It can be showed that the presence of purely trigonometric terms is related to the inclination of the Laplace plane, see for example the explicit expressions of the coefficients in Celletti et al. (2023).
With a slight abuse of notation, the first return map in terms of action-angle variables will be still called ℱ.
The rigorous definition of Diophantine condition can be found in Möser (1962).
References
Baldomá, I., Giralt, M., Guardia, M.: Breakdown of homoclinic orbits to L3 in the RPC3BP (I). Complex singularities and the inner equation. Adv. Math. 408, 108562 (2022). https://doi.org/10.1016/j.aim.2022.108562
Baldomá, I., Giralt, M., Guardia, M.: Breakdown of homoclinic orbits to L3 in the RPC3BP (II). An asymptotic formula. Adv. Math. 430, 109218 (2023). https://doi.org/10.1016/j.aim.2023.109218
Barutello, V.L., De Blasi, I.: A note on chaotic billiards with potentials (2023). https://doi.org/10.48550/arXiv.2312.01312
Barutello, V., Canneori, G.M., Terracini, S.: Symbolic dynamics for the anisotropic \(N\)-centre problem at negative energies. Arch. Ration. Mech. Anal. 242(3), 1749–1834 (2021). https://doi.org/10.1007/s00205-021-01714-8
Barutello, V.L., De Blasi, I., Terracini, S.: Chaotic dynamics in refraction galactic billiards. Nonlinearity 36(8), 4209 (2023). https://doi.org/10.1088/1361-6544/acdec2
Bolotin, S.V.: Degenerate billiards in celestial mechanics. Regul. Chaotic Dyn. 22(1), 27–53 (2017). https://doi.org/10.1134/S1560354717010038
Bolotin, S.V., Negrini, P.: Regularization and topological entropy for the spatial \(n\)-center problem. Ergod. Theory Dyn. Syst. 21(2), 383–399 (2001). https://doi.org/10.1017/S0143385701001195
Boscaggin, A., Dambrosio, W., Feltrin, G.: Periodic solutions to a perturbed relativistic Kepler problem. SIAM J. Math. Anal. 53(5), 5813–5834 (2021). https://doi.org/10.1137/20M1333547
Breiter, S.: Lunisolar apsidal resonances at low satellite orbits. Celest. Mech. Dyn. Astron. 74(4), 253–274 (1999). https://doi.org/10.1023/A:1008379908163
Celletti, A.: From infinite to finite time stability in Celestial Mechanics and Astrodynamics. Astrophys. Space Sci. 368 (2023). https://doi.org/10.1007/s10509-023-04264-5
Celletti, A., Chierchia, L.: KAM Stability and Celestial Mechanics. Am. Math. Soc., Providence (2007)
Celletti, A., Ferrara, L.: An application of Nekhoroshev theorem to the restricted three-body problem. Celest. Mech. Dyn. Astron. 64, 261–272 (1996). https://doi.org/10.1007/BF00728351
Celletti, A., Galeş, C.: On the dynamics of space debris: 1:1 and 2:1 resonances. J. Nonlinear Sci. 24, 1231–1262 (2014). https://doi.org/10.1007/s00332-014-9217-6
Celletti, A., Giorgilli, A.: On the stability of the Lagrangian points in the spatial restricted problem of three bodies. Celest. Mech. Dyn. Astron. 50, 31–58 (1991). https://doi.org/10.1007/BF00048985
Celletti, A., Galeş, C., Pucacco, G.: Bifurcation of lunisolar secular resonances for space debris orbits. SIAM J. Appl. Dyn. Syst. 15(3), 1352–1383 (2016). https://doi.org/10.1137/15M1042632
Celletti, A., Efthymiopoulos, C., Gachet, F., et al.: Dynamical models and the onset of chaos in space debris. Int. J. Non-Linear Mech. 90, 147–163 (2017). https://doi.org/10.1016/j.ijnonlinmec.2016.12.015
Celletti, A., Galeş, C., Pucacco, G., et al.: Analytical development of the lunisolar disturbing function and the critical inclination secular resonance. Celest. Mech. Dyn. Astron. 127(3), 259–283 (2017b). https://doi.org/10.1007/s10569-016-9726-8
Celletti, A., Pucacco, G., Vartolomei, T.: Reconnecting groups of space debris to their parent body through proper elements. Sci. Rep. 11(1), 22676 (2021). https://doi.org/10.1038/s41598-021-02010-x
Celletti, A., Pucacco, G., Vartolomei, T.: Proper elements for space debris. Celest. Mech. Dyn. Astron. 134(2), 11 (2022). https://doi.org/10.1007/s10569-022-10064-w
Celletti, A., De Blasi, I., Efthymiopoulos, C.: Nekhoroshev estimates for the orbital stability of Earth’ satellites. Celest. Mech. Dyn. Astron. 135(2), 10 (2023). https://doi.org/10.1007/s10569-023-10124-9
Chandrasekhar, S.: Ellipsoidal figures of equilibrium: an historical account. Commun. Pure Appl. Math. 20(2), 251–265 (1967). https://doi.org/10.1002/cpa.3160200203
Daquin, J., Rosengren, A.J., Alessi, E.M., et al.: The dynamical structure of the MEO region: long-term stability, chaos, and transport. Celest. Mech. Dyn. Astron. 124(4), 335–366 (2016). https://doi.org/10.1007/s10569-015-9665-9
De Blasi, I., Terracini, S.: Refraction periodic trajectories in central mass galaxies. Nonlinear Anal. 218, 112766 (2022). https://doi.org/10.1016/j.na.2021.112766
De Blasi, I., Terracini, S.: On some refraction billiards. Discrete Contin. Dyn. Syst. 43(3–4), 1269–1318 (2023). https://doi.org/10.3934/dcds.2022131
De Blasi, I., Celletti, A., Efthymiopoulos, C.: Satellites’ orbital stability through normal forms. Proc. Int. Astron. Union, 15(S364), 146–151 (2021). https://doi.org/10.1017/S174392132100137X
De Blasi, I., Celletti, A., Efthymiopoulos, C.: Semi-analytical estimates for the orbital stability of Earth’s satellites. J. Nonlinear Sci. 31(6), 1–37 (2021b). https://doi.org/10.1007/s00332-021-09738-w
Delis, N., Efthymiopoulos, C., Kalapotharakos, C.: Effective power-law dependence of Lyapunov exponents on the central mass in galaxies. Mon. Not. R. Astron. Soc. 448(3), 2448–2468 (2015). https://doi.org/10.1093/mnras/stv064
Devaney, R.L.: An Introduction to Chaotic Dynamical Systems. Studies in Nonlinearity. Westview Press, Boulder (2003). https://doi.org/10.1201/9780429280801. reprint of the second (1989) edition
Do Carmo, M.P.: Differential Geometry of Curves and Surfaces: Revised and Updated, 2nd edn. Dover, New York (2016)
Efthymiopoulos, C.: Canonical perturbation theory; stability and diffusion in Hamiltonian systems: applications in dynamical astronomy. In: Workshop Series of the Asociacion Argentina de Astronomia, pp. 3–146 (2011)
ESA’s annual space environment report. Tech. Rep., European Space Agency, Space Debris Office (2022)
Fassò, F., Benettin, G.: Composition of Lie transforms with rigorous estimates and applications to Hamiltonian perturbation theory. Z. Angew. Math. Phys. 40(3), 307–329 (1989). https://doi.org/10.1007/BF00945008
Ferrarese, L., Ford, H.: Supermassive black holes in galactic nuclei: past, present and future research. Space Sci. Rev. 116(3–4), 523–624 (2005). https://doi.org/10.1007/s11214-005-3947-6
Froeschlé, C., Lega, E., Gonczi, R.: Fast Lyapunov indicators. Application to asteroidal motion. Celest. Mech. Dyn. Astron. 67(1), 41–62 (1997). https://doi.org/10.1023/A:1008276418601
Gasiorek, S.: On the dynamics of inverse magnetic billiards. Nonlinearity 34(3), 1503 (2021). https://doi.org/10.1088/1361-6544/abe2f1
Giorgilli, A.: Notes on Hamiltonian Dynamical Systems, vol. 102. Cambridge University Press, Cambridge (2022)
Giorgilli, A., Skokos, C.: On the stability of the Trojan asteroids. Astron. Astrophys. 317, 254–261 (1997)
Gkolias, I., Daquin, J., Skoulidou, D.K., Tsiganis, K., Efthymiopoulos, C.: Chaotic transport of navigation satellites. Chaos 29(10), 101106 (2019). https://doi.org/10.1063/1.5124682
Golé, C.: Symplectic Twist Maps: Global Variational Techniques, vol. 18. World Scientific, Singapore (2001). https://doi.org/10.1142/1349
Guzzo, M., Lega, E.: Theory and applications of fast Lyapunov indicators to model problems of celestial mechanics. Celest. Mech. Dyn. Astron. 135(4), 37 (2023). https://doi.org/10.1007/s10569-023-10152-5
Hasselblatt, B., Katok, A.: A First Course in Dynamics. Cambridge University Press, New York (2003). https://doi.org/10.1017/CBO9780511998188
Hirsch, M.W., Smale, S., Devaney, R.L.: Differential Equations, Dynamical Systems, and an Introduction to Chaos, 3rd edn. Elsevier/Academic Press, Amsterdam (2013). https://doi.org/10.1016/B978-0-12-382010-5.00001-4
Hughes, S.: Earth satellite orbits with resonant lunisolar perturbations I. Resonances dependent only on inclination. Proc. R. Soc. Lond., Math. Phys. Sci. 372, 243–264 (1980). https://doi.org/10.1098/rspa.1980.0111
Kalapotharakos, C.: The rate of secular evolution in elliptical galaxies with central masses. Mon. Not. R. Astron. Soc. 389(4), 1709–1721 (2008). https://doi.org/10.1111/j.1365-2966.2008.13592.x
Kaloshin, V., Sorrentino, A.: On the local Birkhoff conjecture for convex billiards. Ann. Math. (2) 188(1), 315–380 (2018). https://doi.org/10.4007/annals.2018.188.1.6
Kaula, W.M.: Development of the lunar and solar disturbing functions for a close satellite. Astron. J. 67, 300–303 (1962). https://doi.org/10.1086/108729
Kaula, W.M.: Theory of Satellite Geodesy. Blaisdell, Waltham (1966)
King-Hele, D.G., Walker, D.M.C.: Predicting the orbital lifetimes of Earth satellites. Acta Astronaut. 18, 123–131 (1988). https://doi.org/10.1016/0094-5765(88)90093-8
Knauf, A.: The \(n\)-centre problem of celestial mechanics for large energies. J. Eur. Math. Soc. 4(1), 1–114 (2002). https://doi.org/10.1007/s100970100037
Kozai, Y.: Secular perturbations of asteroids with high inclination and eccentricity. Astron. J. 67, 591–598 (1962). https://doi.org/10.1086/108790
Legnaro, E., Efthymiopoulos, C.: A detailed dynamical model for inclination-only dependent lunisolar resonances. Effect on the eccentricity growth mechanism. Adv. Space Res. 72(7), 2460–2480 (2023). https://doi.org/10.1016/j.asr.2022.07.057
Lerman, A., Zharnitsky, V.: Whispering gallery orbits in Sinai oscillator trap. Phys. D: Nonlinear Phenom. 425, 132960 (2021). https://doi.org/10.1016/j.physd.2021.132960
Levi-Civita, T.: Sur la résolution qualitative du problème restreint des trois corps. Acta Math. 30(1), 305–327 (1906). https://doi.org/10.1007/BF02418577
Lidov, M.L.: The evolution of orbits of artificial satellites of planets under the action of gravitational perturbations of external bodies. Planet. Space Sci. 9, 719–759 (1962). https://doi.org/10.1016/0032-0633(62)90129-0
Miranda, C.: In: Un’osservazione su un teorema di Brouwer, Boll UMI, vol. 3, pp. 5–7 (1940)
Morbidelli, A.: Modern celestial mechanics: aspects of solar system dynamics (2002)
Möser, J.: On invariant curves of area-preserving mappings of an annulus. Nachr. Akad. Wiss. Gött., 2 II, 1–20 (1962)
Murray, C.D., Dermott, S.F.: Solar System Dynamics. Cambridge University Press, Cambridge (1999). https://doi.org/10.1017/CBO9781139174817
Nekhoroshev, N.N.: An exponential estimate of the time of stability of nearly-integrable Hamiltonian systems. Usp. Mat. Nauk 32(6), 5–66 (1977). https://doi.org/10.1070/RM1977v032n06ABEH003859
Nie, T., Gurfil, P.: Long-term evolution of orbital inclination due to third-body inclination. Celest. Mech. Dyn. Astron. 133(1), 1–33 (2021). https://doi.org/10.1007/s10569-020-09997-x
Panov, A.A.: Elliptical billiard table with Newtonian potential. Math. Notes 55(3), 334–334 (1994). https://doi.org/10.1007/BF02110789
Pöschel, J.: Nekhoroshev estimates for quasi-convex Hamiltonian systems. Math. Z. 213(1), 187–216 (1993). https://doi.org/10.1007/BF03025718
Rosengren, A.J., Scheeres, D.J.: Long-term dynamics of high area-to-mass ratio objects in high-Earth orbit. Adv. Space Res. 52, 1545–1560 (2013). https://doi.org/10.1016/j.asr.2013.07.033
Rosengren, A.J., Scheeres, D.J., McMahon, J.W.: The classical Laplace plane as a stable disposal orbit for geostationary satellites. Adv. Space Res. 53(8), 1219–1228 (2014). https://doi.org/10.1016/j.asr.2014.01.034
Seifert, H.: Periodische Bewegungen mechanischer Systeme. Mat. Ž. 51, 197–216 (1948). https://doi.org/10.1007/BF01291002
Shute, B.E., Chiville, J.: The lunar-solar effect on the orbital lifetimes of artificial satellites with highly eccentric orbits. Planet. Space Sci. 14(4), 361–369 (1966). https://doi.org/10.1016/0032-0633(66)90073-0
Steichen, D., Giorgilli, A.: Long time stability for the main problem of artificial satellites. Celest. Mech. Dyn. Astron. 69(3), 317–330 (1997). https://doi.org/10.1023/A:1008277122375
Tabachnikov, S.: Geometry and Billiards. Student Mathematical Library, vol. 30. Am. Math. Soc., Providence (2005). https://doi.org/10.1090/stml/030
Takeuchi, A., Zhao, L.: Conformal transformations and integrable mechanical billiards. Adv. Math. 436, 109411 (2024). https://doi.org/10.1016/j.aim.2023.109411
Tremaine, S., Touma, J., Namouni, F.: Satellite dynamics on the Laplace surface. Astron. J. 137(3), 3706 (2009). https://doi.org/10.1088/0004-6256/137/3/3706
Acknowledgements
The author wishes to express her thanks to all her co-authors.
Funding
Open access funding provided by Università degli Studi di Torino within the CRUI-CARE Agreement. Supported by Italian Research Center on High Performance Computing Big Data and Quantum Computing (ICSC), project funded by European Union - NextGenerationEU - and National Recovery and Resilience Plan (NRRP) - Mission 4 Component 2. Spoke 3, Astrophysics and Cosmos Observations. Work partially supported by INdAM group G.N.A.M.P.A.
Author information
Authors and Affiliations
Contributions
The author confirms sole responsibility for the manuscript preparation.
Corresponding author
Ethics declarations
Ethics approval
Not applicable.
Consent to participate
Not applicable.
Consent for publication
Not applicable.
Competing interests
The authors declare no competing interests.
Additional information
Publisher’s Note
Springer Nature remains neutral with regard to jurisdictional claims in published maps and institutional affiliations.
Rights and permissions
Open Access This article is licensed under a Creative Commons Attribution 4.0 International License, which permits use, sharing, adaptation, distribution and reproduction in any medium or format, as long as you give appropriate credit to the original author(s) and the source, provide a link to the Creative Commons licence, and indicate if changes were made. The images or other third party material in this article are included in the article’s Creative Commons licence, unless indicated otherwise in a credit line to the material. If material is not included in the article’s Creative Commons licence and your intended use is not permitted by statutory regulation or exceeds the permitted use, you will need to obtain permission directly from the copyright holder. To view a copy of this licence, visit http://creativecommons.org/licenses/by/4.0/.
About this article

Cite this article
De Blasi, I. Analytical methods in celestial mechanics: satellites’ stability and galactic billiards. Astrophys Space Sci 369, 52 (2024). https://doi.org/10.1007/s10509-024-04312-8
Received:
Accepted:
Published:
DOI: https://doi.org/10.1007/s10509-024-04312-8