
Abstract
We reassess the absolute and relative sea level changes at 38 tide gauge stations in the earthquake-affected Western North Pacific for the 1993–2015 period, focusing on the vertical land motion (VLM) which is crucial for narrowing the gap between these estimates. In this area, simply discarding all earthquake-affected sites, one overestimates the average regional sea level rise by more than 0.5 mm/year. Disregarding VLM would lead to misestimating local sea level trends between 0.2 and 7.6 mm/year. If accounted for, but modeled as linear during the entire time span, VLM leads to regional absolute sea level rise errors of up to 0.4 mm/year. Therefore, we introduce a new methodology that better represents the Global Positioning System (GPS)-derived nonlinear VLM by accounting for co-seismic offsets, changes in the vertical velocities and post-seismic transient. Also, for the first time, a combination of white and power-law noises is added to this nonlinear model to derive proper uncertainties of VLM. We find a maximum difference of 15.3 mm/year between pre- and post-seismic vertical velocities. The GPS-sensed vertical co-seismic displacement approaches 36 mm. Assuming the changes in vertical velocities and displacement due to the tectonic movements is not accounted for, and then, estimating absolute sea level rise from tide gauges can result in an error of 10 mm/year. Introducing a new nonlinear VLM model improves absolute tide gauge sea level estimates by 20% on average. Finally, for the reconstructed Western North Pacific sea level, altimetry agrees best with tide gauge data corrected employing the new nonlinear VLM model.
Similar content being viewed by others
Avoid common mistakes on your manuscript.
Introduction
Estimates of relative sea level rise derived from tide gauge records are affected both by vertical land motion (VLM) and by absolute sea level rise due to ocean warming, salinity change, freshwater influx and other factors (Wӧppelmann and Marcos 2016). Using the data- or model-based Glacial Isostatic Adjustment (GIA) effect is the simplest widely employed way to correct tide gauge records for VLM (Church and White 2011; Jevrejeva et al. 2014). However, this approach contains large uncertainties because the ice load history and visco-elastic properties of the earth’s interior are not sufficiently known (Argus et al. 2014). It also ignores the fact that land motion is caused by many present-day large-scale tectonic (Parsons 2006) and local effects (Ingebritsen and Galloway 2014; Schumacher et al. 2018). One of the key assumptions made when relating relative sea level rise to absolute sea level rise is that the VLM is linear over the entire time span of tide gauge records. Although this assumption is true for GIA rates, it might not necessarily be reliable for areas of present-day time-varying processes, such as volcanic, human and tectonic processes which contribute differently to VLM (Karegar et al. 2015, 2017). Here, modern techniques that allow us to model the present-day nonlinear lithospheric motion need to be employed. This opportunity is provided nowadays by precise Global Positioning System (GPS) observations recorded at thousands of permanent stations around the globe. Using the GPS position time series, the uplift or subsidence resulting from present-day ice mass loss, groundwater extraction or mining is estimated with submillimeter/year accuracy (Jiang et al. 2010; Brown and Nicholls 2015; Hammond et al. 2016). GPS position time series have also been employed to study tectonic phenomena in seismic zones (Huang et al. 2018). From these series, large co-seismic offsets and post-seismic deformations are observed and often modeled along with the linear vertical rate, its changes over time and seasonal signals.
Tide gauge records from tectonically active areas were frequently considered to be biased by earthquake-related processes. Therefore, they were often omitted when global or regional mean sea level rates were estimated (Woodworth et al. 2009; Jevrejeva et al. 2014; Wӧppelmann and Marcos 2016). If employed, they were corrected for the difference between absolute sea level estimates derived from altimetry and relative sea level estimates derived from tide gauges, adopted as VLM (Merrifield et al. 2009), or for the GPS-derived VLM, but only if the vertical rates had small uncertainties (Frederikse et al. 2016, 2018; Dangendorf et al. 2017; Kleinherenbrink et al. 2018). While GPS-derived VLM recorded for the last 25 years (since 1993) might not represent the entire time span that tide gauge records cover (since 1800; Riva et al. 2017), we argue that applying a pure GPS-derived linear VLM to correct pre-1993 tide gauge records for the earth’s crust deformations is nowadays better than no correction at all. To make the GPS observations more useful to estimate the VLM, we need to understand and remove all factors biasing them (Bos et al. 2010; Riva et al. 2017; Klos et al. 2018). Riva et al. (2017) presented the VLM nonlinearities due to elastic deformation of the earth’s crust. In this research, we address VLM nonlinearities due to earthquakes, which should be included together with the elastic deformation effect. On the contrary to the pure linear VLM, the nonlinear earthquake-related changes in VLM cannot be extrapolated to the past as it is not straightforward to state how the earth’s crust deformed during past earthquakes. Nevertheless, including current changes will help us to derive more precise present-day VLM. This will enhance sea level reconstruction from long tide gauge records.
Currently, no regional reconstruction of sea level accounts for the full time evolution of VLM for earthquake-affected areas. We argue that changes in vertical velocities over the years, small co-seismic offsets and post-seismic transient, that did not lead to the removal of time series from sea level reconstruction, may have been mis-modeled. Consistently accounting for these effects, we introduce a completely new “optimized” VLM model for the Western North Pacific basin affected by the megathrust Tohoku-Oki earthquake (a magnitude 9.1 Mw, National Earthquake Information Center, NEIC) on March 11, 2011, with epicenter at 38.322°N, 142.369°E. Knowing about 3500 earthquakes with magnitudes exceeding 6 which have occurred around the globe since 1995 (NEIC), employing our methodology will help in the future to include more tide gauge information for better estimating regional sea level changes. We estimate both absolute and relative sea level changes. Absolute sea level is derived from gridded altimetry records, altimetry at the tide gauge location, and tide gauges corrected using standard linear and optimized nonlinear VLM models. Relative sea level changes are estimated using tide gauge data and altimetry corrected by both VLM models. All analyses are performed for the time from January 1993 to December 2015 to overlap with altimetry and GPS data. Our methodology is presented for the Western North Pacific region but can also be applied to any other earthquake-affected areas.
We introduce the observations in the next section. Then, we present the methodology giving a detailed description of linear and nonlinear VLM models. Further, we describe the results in terms of VLM, relative and absolute sea level rises, proving that the nonlinear model we introduce fits the GPS-derived position time series better than the commonly used linear model and narrows the gap between altimetry and tide gauge estimates. We apply our new methodology to reconstruct the sea level and prove that using the new VLM brings the tide gauge-derived absolute sea level rise closer to altimetry estimates. Finally, we provide a summary and conclusions.
Data
The Western North Pacific region is defined here following Thompson and Merrifield (2014), where an agglomerative hierarchical cluster analysis was performed to distinguish areas based on the coherent variance of altimetry-derived sea surface height. The region is bordered by Russia, the North and South Koreas, China and Vietnam on the west, then the Philippines, the Solomon Islands and Samoa. Its southern and eastern borders are fixed at 10°S and 130°W (Fig. 1b).

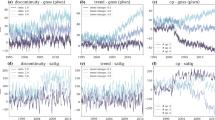
GPS-derived vertical land motion for the Western North Pacific area, for which the nonlinear model is found to be optimal to fit the earthquake impact. a GPS-derived vertical land motion at the tide gauge location, considered as linear (nine stations; orange) and nonlinear (27 stations; turquoise), for 15 GPS stations. b Western North Pacific area (black polygon), plotted along with the area for which the sea level is reconstructed (yellow-shaded area). Stations affected by the nonlinearities are plotted in green. Those nonlinearities arise from the Tohoku-Oki megathrust earthquake, whose epicenter is marked as a yellow star. The rest of the GPS observations have a clear linear vertical trend (marked in orange). c Post-seismic deformation functions employed to create the optimized vertical land motion model (post-seismic-transient-time is given). d Multi-trend model with two different velocities. These can be separated by vertical offset, not presented at the plot. Velocity is estimated based on the station displacement given in millimeter. It is expressed as a station displacement over a certain period of time, usually as millimeter per year (mm/year). The greater the velocity is, the faster is the station moving in a certain direction
We employ 38 monthly tide gauge records from the Permanent Service for Mean Sea Level (PSMSL, Holgate et al. 2013, Table S1). The PSMSL database provides series from 30 stations in Japan, while the remaining eight stations are located at islands in the southern part of the Western North Pacific. For these sites, the VLM is inferred in two ways, from GIA models and from GPS position time series. For GIA models, we used the GIA ICE6G_C(VM5a) (Peltier et al. 2015) and Geruo A et al. (2013) model corrections. As for GPS, 36 daily vertical position time series are obtained from the International GNSS Service (IGS, Table S1). These stations are located from a few meters to about 10 km from the tide gauges. We separate the GPS-derived position time series into a first group with linear VLM, and a second one affected by nonlinearity due to the Tohoku-Oki earthquake; we base this selection on the information about the post-seismic deformation model adopted directly from the ITRF2014 solution (Altamimi et al. 2016), which was developed based on consecutive station-by-station root-mean-square fitting (Fig. 1). The linear VLM is represented through the standard model, while for the nonlinear time series, different VLM models are tested: the standard model and a series of improved models that are described below. To assess the new methodology, we employed independent, absolute sea level estimates from the radar-altimetric Essential Climate Variable (ECV) dataset of the European Space Agency Climate Change Initiative (CCI; Ablain et al. 2009, 2015, 2017; Legeais et al. 2018). Details on the altimetry records are provided with Supplementary material.
The time span of our analysis is selected from January 1993 to December 2015, which overlaps with available of altimetry records and GPS data.
Methodology
We make use of the IGS time series obtained within the latest “repro-2” global reprocessing of observations (Rebischung et al. 2016). These series were also used during the creation of the ITRF2014 references frame (Altamimi et al. 2016). The time series are preprocessed before the VLM models are fitted. The outliers are removed with the Interquartile Range rule (IQR; Langbein and Bock 2004). For the station-specific offsets due to antennae or software change, the dates are adopted from the IGS and manual inspection of the time series is carried out. The date of the earthquake is reported by the NEIC.
In the standard approach, for representing linear VLM at one single station, one accounts for the intercept x0, the linear trend b, i seasonal signals with amplitudes Si and Ci, n offsets with amplitudes J and the Heaviside step function H. Here, all significant tropical and draconitic periods are included, as in Bogusz and Klos (2016). Also, a combination of white and power-law noises, which is preferred for the GPS position time series (Williams et al. 2004; Klos et al. 2016), is included in ε. The expression is:
In our new approach, a more detailed VLM model is fitted to the time series identified as nonlinear in this study, which adds a piecewise linear velocity and post-seismic transient terms to the standard velocity model (Bevis and Brown 2014):
where lτ and eτ are time constants of logarithmic and exponential functions, and tEHQ is the epoch of the earthquake. Following the ITRF2014 solution, different versions of post-seismic deformations are employed: single exponential, single logarithmic, a combination of exponential and logarithmic functions and a combination of double exponential functions (Fig. 1). The form of post-seismic deformation best corresponding to a certain GPS station is adopted from the ITRF2014 estimates (Altamimi et al. 2016). In (2), we include a change between pre- and post-seismic velocities: two velocities (linear rates, b) affecting one GPS time series which is separated by the co-seismic offset, which is included in n. If the time series was affected by more earthquakes, more changes in velocities need to be assumed. When fitting the model to GPS time series, five other aftershock events following the earthquake are also assumed in n. We refer to (1) as “standard linear model,” while (2) is referred to as the “optimized nonlinear model” of VLM. Note that for stations recognized as moving linearly, only the standard model (1) is fitted. For stations recognized as moving nonlinearly, both (1) and (2) models are fitted into GPS position time series. All parameters from (1) and (2) are estimated together in one run using the Maximum Likelihood Estimation (MLE; Langbein and Johnson 1997).
Absolute and relative sea level rates are commonly estimated by fitting the standard model of the trend, and the annual and semiannual signals to altimetry and tide gauge records. Altimetry records at the tide gauge locations are defined here via the nearest altimetry grid point; we find an average distance of about 30 km between the two locations. To include the impact of climate variability due to Pacific Decadal Oscillation (PDO) and the North Pacific Gyre Oscillation (NPGO) on sea level change, we include both effects in a multivariate regression analysis. We find that although the sea level records are well-correlated with PDO and NPGO indices at the noise level (after trend and seasonal signatures were removed), the sea level trends are affected below the 1-sigma significance level. Nevertheless, to stay consistent with previous studies, the trends that we present are estimated with PDO and NPGO included. (Details are provided in Supplementary materials.) Noise in the sea level records was identified as best modeled through an autoregressive and power-law process by Bos et al. (2013) and Royston et al. (2018) using longer tide gauge records. Since the time span of 15 years of monthly observations used here is too short to account for such noise models, we assume a pure white noise model (Williams et al. 2004).
We discuss both regional and local sea level rates. The former represents the mean value over the Western North Pacific area, while the latter indicates all phenomena occurring at the individual tide gauge location.
Results and discussion
The newly introduced optimized nonlinear VLM is discussed in light of different applications; but in all cases, it is compared to the standard linear model. First, we emphasize the differences between linear and nonlinear VLM models. Then, we apply those models to estimate absolute sea level rise from tide gauge records and compare it to altimetry estimates. Next, relative sea level rise as derived from tide gauge records and altimetry minus VLM estimates is provided. At the end, we reconstruct the Western North Pacific sea level rates using both linear and nonlinear VLM corrections and prove that the latter is optimal to minimize the difference between tide gauge and altimetry-derived absolute sea level.
VLM model
We find that a GPS-derived VLM for the stations in Japan, prior to the Tohoku-Oki earthquake, yields velocities between − 4.5 and 5.6 ± 0.1 mm/year, in agreement with many previous studies. Uplift is identified for stations located in northern Japan, while subsidence characterizes stations in southern Japan. VLM estimates are more similar to each other for stations located outside of Japan, varying between − 1.3 and 0.8 ± 0.1 mm/year and having probably no seismic influence. We employ GPS series longer than 5 years, which allows us to estimate precise velocities and their changes over time. We find a maximum difference between pre- and post-seismic velocities of 15.3 mm/year, and a maximum co-seismic offset of 36 mm (Fig. 2). As expected, the estimated offsets are spatially correlated; the largest offsets are noticed for stations close to the earthquake epicenter. Offsets decrease for increasing distances from the epicenter and approach zero for the most remote stations. One possible approach would be to apply only the changes in velocities in the VLM model, which occurred because of the earthquake, and not include the offset between these velocities. We find that in this case, one would commit an error of about 2 mm/year in tide gauge-derived absolute sea level rise, due to the missing offset. If additionally, as for the standard linear model of VLM, no change in velocity is assumed and thus the velocity prior to an earthquake is adopted as representative for the entire time span, one would commit an error in the tide gauge-derived absolute sea level estimates of up to 15 mm/year. Therefore, we strongly recommend that an optimized model of VLM combines the changes in velocity, post-seismic decays and offsets at the time of the earthquake.

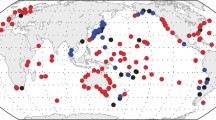
Amplitude of the vertical offset (in mm) which occurred at the time of the Tohoku-Oki earthquake (March 11, 2011), derived from the GPS position time series, as presented in (2). The values of the vertical offset are spatially correlated. Therefore, we suggest it should be included when the optimal nonlinear land motion model is employed to correct the tide gauge records
The above is also confirmed by comparing the GPS-derived VLM to the one derived as the difference between altimetry and tide gauge records at the GPS location (Fig. 3). Comparing these two rates, we notice that for all but four tide gauge locations (GPS stations: P113, P115, P116 and P203; tide gauge stations, respectively: 813, Hakodate I, 1026, Onisaki, 1343, Ito II and 1438, Yaizu), pre-seismic velocities agree within 1.5 mm/year for Japanese stations. A change between pre- and post-seismic velocities is also well observed for altimetry minus tide gauge differences with an obvious co-seismic offset. GPS station P108 (PSMSL 130, Aburatsubo) lends itself an extreme example of disagreement between both estimates; the difference is equal to 2.2 mm/year. Although the altimetry minus tide gauge estimates agree well with the GPS rates for the optimized nonlinear model of VLM, we caution that this agreement is no longer observed once the standard linear model is wrongly employed instead of the optimized nonlinear VLM.

Vertical land motion (in mm) estimated from altimetry minus tide gauge estimates, often adopted to correct the tide gauge records for the land movement. Standard and optimized GPS-derived vertical land motion models are also provided, respectively, in blue and red. Only GPS stations for which the vertical land motion is recognized as nonlinear in this study are plotted
The GIA correction (Steffen and Wu 2011; Kierulf et al. 2014), commonly applied in sea level studies to correct tide gauge records for linear VLM, accounts only for a small part of the land motion in seismic zones. The GIA models predict a maximum uplift of +0.6 and +0.3 mm/year for Japan and a minimum of − 0.2 mm/year for the open ocean islands. Comparing these values with the GPS-derived VLM, we find that both the Peltier et al. (2015) and Geruo A et al. (2013) model corrections largely underestimate the real nonlinear vertical rates of up to 13 mm/year.
Absolute sea level estimates
We estimate the mean absolute sea level rise derived from gridded altimetry in the Western North Pacific equal to 3.55 mm/year with an error of 0.20–0.30 mm/year for the period January 1993 to December 2015. For the regional average, a 1-sigma error of 0.01 mm/year accounts for white noise only. For the magnitude of systematic errors in the ESA CCI altimetry reprocessing, Ablain et al. (2009, 2015) suggested an uncertainty 0.20–0.30 mm/year. Therefore, the latter value is employed here.
Absolute sea level rise is also estimated by us from altimetry records at the tide gauge locations by evaluating the altimetry grid point closest to the tide gauges. Sea level change is not uniform over the entire area of the Western North Pacific (Fig. 4). Stations in the Philippine Sea (PSMSL 1391, 1474) and in the open ocean display trends largely above the regional mean of 3.55 mm/year, while absolute sea level trends estimated for nearby stations in Japan are similar to each other with a mean of 3.53 ± 0.17 mm/year. Stations at the Japanese Sea show similar estimates of sea level trends evidencing the uniform rise of the sea level in this region, which is in agreement with Moon and Lee (2016). This demonstrates the well-known fact that the low spatial sampling of the tide gauges does not allow straightforward estimates of regional sea level rise, as local effects may add high variability of sea level rates (Fenoglio-Marc et al. 2011, 2012). The location of the tide gauges is clearly not representative for the entire area of the Western North Pacific, with no stations located in the eastern part of this region.

Tide gauge-derived absolute sea level rise (dots) versus ESA CCI multi-mission gridded sea level anomalies (background colored-map). Top: tide gauge records corrected using the standard linear land motion. Bottom: tide gauge observations corrected using the optimized nonlinear land motion. The differences between absolute tide gauge-derived trends, estimated when the standard and optimized land motion models are used, are plotted as a histogram in the top panel. The tide gauges with weak spatial correlations (PSMSL: 1026, 1438, 1343 and 813) are marked at the bottom-right panel. The largest differences in the tide gauge trends between standard linear and optimized nonlinear vertical land motions are noticed for stations: PSMSL: 753, 1344, 1264, 721 and 813 (top right panel), for which the largest values of the vertical offset are estimated
Correcting tide gauge records for VLM bridges the gap between the tide gauge and altimetry estimates. From the analysis of linear VLM derived from the GIA models, it becomes obvious that using the GIA correction only leads to under-estimating absolute sea level rates by more than 10 mm/year in some cases. Therefore, it is necessary to employ the GPS position time series to account for other effects contributing to land motion rates.
A maximum difference of 3 mm/year is found between tide gauge-derived absolute sea level rise for the standard linear and optimized nonlinear VLM estimates from the GPS position time series. Five tide gauge stations are mostly affected: 721 (Asamushi), 753 (Kashiwazaki), 813 (Hakodate I), 1264 (Oga) and 1344 (Ogi) (Fig. 3). The misfits depend mainly on a change between pre- and post-seismic GPS velocities, and on the vertical offset which occurred at the time of the earthquake. We note that both are not included in the standard linear model of VLM.
After correcting the tide gauge records by the GPS-fitted optimized nonlinear VLM model, we compute the tide gauge unweighted mean absolute regional sea level trend for the Western North Pacific using a bootstrap method (one hundred Monte Carlo simulations where five randomly chosen tide gauges are removed each time). Trends vary between 3.65 and 4.00 ± 0.30 mm/year, confirming that the optimized nonlinear VLM model is indeed more representative for this region and brings the absolute tide gauge-derived sea level rates closer to altimetry estimates at individual tide gauges.
The more conservative approach to simply exclude those tide gauge stations affected by the earthquake when deriving regional sea level estimates would lead us to remove 29 stations out of 38, all situated in Japan. If the sea level rise is to be estimated with the remaining tide gauge stations, this estimate would be dominated by tide gauge records in the southern part of the Western North Pacific. It would then overestimate the region average by more than 0.5 mm/year.
Relative sea level estimates
Relative sea level rise, estimated from tide gauges, differs from absolute sea level rise depending on the tide gauge location. Stations situated in the southern part of the Western North Pacific show strong positive trends with values higher than 5 mm/year, which agree within 2 mm/year with the altimetry estimates. Moving from the stable areas to tectonically active Japan, the differences between the relative and absolute sea level values become more significant. The largest differences of a few mm/year are found in northern and southeastern Japan. For the nearby Japanese stations, 10 mm/year differences in the relative sea level are observed, indicating large local movements of the lithosphere, arising mainly from the tectonic processes.
To examine whether the tide gauge records are indeed representative of regional sea level, we evaluate the correlation between the tide gauge records and gridded altimetry time series at the noise level, once trend and seasonal signals are removed beforehand. We find that records at four tide gauge stations in Japan, namely 813 (Hakodate I), 1026 (Onisaki), 1343 (I–II) and 1438 (Yaizu), are in close agreement with altimetry in their near vicinity, i.e., agree well in terms of local sea level; however, they do not map the regional sea level. We note that these tide gauges also poorly agree when the optimized nonlinear VLM is compared to the altimetry minus tide gauges estimates, showing differences larger than 1.5 mm/year. Correlation maps for these sites closely resemble bathymetry, which suggests that local effects such as coastal currents or river inflow are responsible (Kusche et al. 2016). Additional explanations for low correlation may be local wind effects or monument instability. In contrast, correlations between the tide gauge records and gridded altimetry time series for the remaining stations are generally higher than 0.7 for almost the entire altimetry grid, which agrees with Hamlington et al. (2013).
For coastal planning, the sea level rise relative to land at the specific location is of interest. The limited number of tide gauges along the coast biases the extrapolation of relative sea level rise to coastlines without tide gauges. As an alternative, assuming the VLM as known, one could estimate relative sea level rise at the location of coastal GPS stations and possibly in a near neighborhood by subtracting the optimized nonlinear or standard linear GPS-derived VLM from satellite altimetry. In this research, we find no difference in the altimetry minus-GPS relative sea level for the stable part of the Western North Pacific, i.e., the open ocean islands, which is reassuring. When moving closer to areas affected by tectonic phenomena, the difference between relative sea level estimates provided by differences between altimetry minus optimized and standard models of VLM increases, as expected. We find that six out of 30 Japanese stations (GPS stations: P103, P104, P109, P110, P204 and P206, Fig. 4) show a misfit larger than 1 mm/year between the models. There is a clear offset occurring at the time of the earthquake observed in both tide gauges and altimetry minus-GPS relative sea level that reaches 7 mm at maximum. Also, a change between pre- and post-seismic velocities in the relative sea level rise can be clearly identified.
Sea level reconstruction
Finally, we investigate whether the correction from an optimized nonlinear model of VLM would indeed be of advantage in reconstructions of area-mean sea level. To test this hypothesis, we compute three time series of area-mean sea level based on the EOF (Empirical Orthogonal Function) analysis reconstruction method (e.g., Church and White 2011) and using spatial patterns derived from satellite altimetry. Unlike computing a simple arithmetic mean of station time series, the EOF method considers the heterogeneous distribution of tide gauges and is thus much more robust. For this analysis, we use the uncorrected and corrected tide gauge time series using both optimized and standard VLM models. Since we reconstruct during the altimetry data period, the area mean from these three reconstructions can be directly evaluated against the area mean from altimetry. In other words, we investigate which of the tide gauge series would fit best to altimetry after spatial interpolation via EOFs.
We consider the region delimited by the shaded polygon presented in Fig. 1b. First, we decompose the gridded altimetry maps in spatial and temporal modes with the EOF method. We then fit by least-squares adjustment the altimetry EOFs to the tide gauge time series. The sea level is reconstructed from six spatial and temporal modes, and the time series of the spatial mean is finally derived from the reconstructions. As mentioned before, we consider for the reconstruction three different sets of tide gauge station time series differing by the applied VLM correction: (1) uncorrected, (2) corrected for standard linear VLM and (3) optimally corrected for nonlinear VLM.
Indeed, for the reconstructed mean, we find the best agreement with the altimetry mean when tide gauges were corrected with the optimized nonlinear model of VLM, having a correlation 0.92 and root-mean-square difference of 15.6 mm. In contrast, the solutions using either uncorrected or standard-corrected tide gauges both differ from the altimetry mean by about 16.7 mm. In other words, we show that correcting tide gauge records using the optimized nonlinear model leads to mean sea levels closer to altimetry. Of course, these differences depend on the size of the region, and by reducing the dimension of the region, the differences between the solutions increase.
Summary and conclusions
For the Western North Pacific and other earthquake-affected areas such as Alaska, Indonesia or South America, the collisions of tectonic plates and associated motion play the main role in relative sea level rise and represent the largest contributor to VLM. Since VLM for these areas should include a change in velocity and the abrupt offset which occurs at the time of the earthquake, it no longer can be considered linear. We find nonlinearity relevant for 124 out of 1055 GPS stations processed by IGS (Rebischung et al. 2016). If it was considered as linear, it would be biased by processes which were not included in the time series model and may change by few mm/year (Trisirisatayawong et al. 2011).
Since the local land motion is small for tide gauges situated at the Philippine Sea, both the linear GIA and standard linear GPS-derived VLM appear appropriate to correct the tide gauge observations. Therefore, also relative sea level trends estimated for tide gauges do not differ significantly from the altimetry estimates. However, at the Japanese stations, which are affected by tectonic movements, we find large differences between the absolute and relative sea levels rates. At some locations, the local VLM is a few times larger compared to linear GIA-derived values (Han et al. 2015).
Significant differences are also observed between individual relative sea level rates from closely located Japanese tide gauge stations, potentially caused by land motion. If we trust the relative sea level estimates and do not account for VLM, the mean sea level for the Western North Pacific may differ from the global mean sea level by 5.40 mm after 10 years. Clearly, from a coastal engineering perspective, relative sea level rise is of high importance. However, for a direct estimation from tide gauge stations, the spatial sampling of the tide gauges represents the main limitation since many coastlines are poorly covered. Relative sea level can alternatively be computed in an indirect way by subtracting the GPS-derived VLM from the coastal altimetry records. We show in this study that employing an optimized nonlinear model of VLM leads to much better agreement between the direct and indirect estimates of relative sea level. To our best knowledge, so far only the standard linear VLM model has been employed for tectonically active areas.
We find that trends of absolute sea level rise, estimated from the tide gauge records corrected for VLM, are also highly sensitive to the specific model which is employed. In tectonically active areas such as Japan, not accounting for land motion estimated from the GPS observations leads to an erroneous estimation of sea level trends between 0.2 and 7.6 mm/year. The accuracy of sea level rise derived from the tide gauge records can thus be enhanced by applying an improved nonlinear VLM model; the optimized model of land motion may also reduce the uncertainty in projections of future relative sea level rise derived from the tide gauge records and bring the sea level reconstructed by tide gauges closer to altimetry estimates. In both cases, other issues related to the GPS station itself such as instability of monuments, multipath effect and offset removal must be considered when aiming for reliable estimates (Williams 2003). Also, the errors in two consecutive reference frames realizations, both with respect to the scale and translation errors, affect the GPS vertical velocities. The former propagates directly to the velocity estimates, while the latter influences the high-latitude stations in relation to their latitude (Wӧppelmann et al. 2009; Collilieux and Wöppelmann 2011). For the ITRF2008 and ITRF2014 realizations (Altamimi et al. 2016), these errors are smaller than 0.1 mm/year and fit the error bar of velocity.
For the Western North Pacific basin, 39 IGS GPS stations were affected by the Tohoku-Oki earthquake; 27 of them are located close to tide gauges and are used to correct sea level observations. These tide gauges may have been omitted in the past when regional sea level was estimated. We demonstrate that the improved nonlinear VLM model reduces the difference between altimetry- and tide gauge-derived absolute sea level trend estimates significantly more compared to applying only the standard linear VLM correction. We also prove that regional absolute sea level rate reconstructed by tide gauge data is closer to altimetry estimates than it is using standard linear VLM. We suggest that the methodology we propose should be applied to obtain more reliable vertical rates and to avoid biased tide gauge-derived regional absolute sea level. This improved methodology is relevant for other areas affected by earthquakes, such as South America (> 95,000 earthquakes in total; > 400 earthquakes with Mw > 6.0), Indonesia (> 76,000 earthquakes in total; > 700 earthquakes with Mw > 6.0) and Alaska (> 9000 earthquakes in total; > 100 earthquakes with Mw > 6.0), where tectonic-related VLM significantly exceeds other contributors and may also influence the sea level estimates of more than 100 tide gauges. This new VLM may also be helpful to provide the estimates of relative sea level rise (altimetry minus VLM) for areas where tide gauges were destroyed during large earthquakes, as the Pacific coasts of South America, where only a few tide gauges are operating at the moment.
References
A G, Wahr J, Zhong S (2013) Computations of the viscoelastic response of a 3-D compressible Earth to surface loading: an application to Glacial Isostatic Adjustment in Antarctica and Canada. Geophys J Int 192(2):557–572. https://doi.org/10.1093/gji/ggs030
Ablain M, Cazenave A, Valladeau G, Guinehut S (2009) A new assessment of the error budget of global mean sea level rate estimated by satellite altimetry over 1993–2008. Ocean Sci 5(2):193–201. https://doi.org/10.5194/os-5-193-2009
Ablain M et al (2015) Improved sea level record over the satellite altimetry era (1993–2010) from the climate change initiative project. Ocean Sci 11(1):67–82. https://doi.org/10.5194/os-11-67-2015
Ablain M, Legeais JF, Prandi P, Marcos M, Fenoglio-Marc L, Dieng HB, Benveniste J, Cazenave A (2017) Satellite altimetry-based sea level at global and regional scales. Surv Geophys 38(1):7–31. https://doi.org/10.1007/s10712-016-9389-8
Altamimi Z, Rebischung P, Métivier L, Collilieux X (2016) ITRF2014: a new release of the international terrestrial reference frame modeling nonlinear station motions. J Geophys Res Solid Earth 121(8):6109–6131. https://doi.org/10.1002/2016JB013098
Argus DF, Peltier WR, Drummond R, Moore AW (2014) The Antarctica component of postglacial rebound model ICE-6G_C (VM5a) based on GPS positioning, exposure age dating of ice thickness, and relative sea level histories. Geophys J Int 198(1):537–563. https://doi.org/10.1093/gji/ggu140
Bevis M, Brown A (2014) Trajectory models and reference frames for crustal motion geodesy. J Geod 88(3):283–311. https://doi.org/10.1007/s00190-013-0685-5
Bogusz J, Klos A (2016) On the significance of periodic signals in noise analysis of GPS station coordinate time series. GPS Solut 20(4):655–664. https://doi.org/10.1007/s10291-015-0478-9
Bos MS, Bastos L, Fernandes RMS (2010) The influence of seasonal signals on the estimation of the tectonic motion in short continuous GPS time-series. J Geodyn 49(3–4):205–209. https://doi.org/10.1016/j.jog.2009.10.005
Bos MS, Williams SDP, Araujo IB, Bastos L (2013) The effect of temporal correlated noise on the sea level rate and acceleration uncertainty. Geophys J Int 196(3):1423–1430. https://doi.org/10.1093/gji/ggt481
Brown S, Nicholls RJ (2015) Subsidence and human influences in mega deltas: the case of the Ganges–Brahmaputra–Meghna. Sci Total Environ 527–528:362–374. https://doi.org/10.1016/j.scitotenv.2015.04124
Church JA, White NJ (2011) Sea level rise from the late 19th to the early 21st century. Surv Geophys 32(4–5):585–602. https://doi.org/10.1007/s10712-011-9119-1
Collilieux X, Wöppelmann G (2011) Global sea level rise and its relation to the terrestrial reference frame. J Geod 85(1):9–22. https://doi.org/10.1007/s00190-010-0412-4
Dangendorf S, Marcos M, Wӧppelmann G, Conrad CP, Frederikse T, Riva R (2017) Reassessment of 20th century global mean sea level rise. Proc Natl Acad Sci USA 114(3):5946–5951. https://doi.org/10.1073/pnas.1616007114
Di Lorenzo E et al (2008) North Pacific Gyre Oscillation links ocean climate and ecosystem change. Geophys Res Lett 35(8):L08607. https://doi.org/10.1029/2007GL032838
Fenoglio-Marc L, Braitenberg C, Tunini L (2011) Sea level variability and trends in the Adriatic Sea in 1993–2008 from tide gauges and satellite altimetry. Phys Chem Earth 40–41:47–58. https://doi.org/10.1016/j.pce.2011.05.014
Fenoglio-Marc L, Schöne T, Illigner J, Becker M, Manurung P, Khafid P (2012) Sea level change and vertical motion from satellite altimetry, tide gauges and GPS in the Indonesian region. Mar Geod 35(1):137–150. https://doi.org/10.1080/01490419.2012.718682
Frederikse T, Riva R, Kleinherenbrink M, Wada Y, van den Broeke M, Marzeion B (2016) Closing the sea level budget on a regional scale: trends and variability on the Northwestern European continental shelf. Geophys Res Lett 43(20):10,864–10,872. https://doi.org/10.1002/2016GL070750
Frederikse T, Jevrejeva S, Riva REM, Dangendorf S (2018) A consistent sea level reconstruction and its budget on basin and global scales over 1958–2014. J Clim. https://doi.org/10.1175/JCLI-D-17-0502.1
Hamlington BD, Leben RR, Strassburg MW, Nerem RS, Kim KY (2013) Contribution of the Pacific decadal oscillation to global mean sea level trends. Geophys Res Lett 40(19):5171–5175. https://doi.org/10.1002/grl.50950
Hammond WC, Blewitt G, Kreemer C (2016) GPS Imaging of vertical land motion in California and Nevada: implications for Sierra Nevada uplift. J Geophys Res Solid Earth 121(10):7681–7703. https://doi.org/10.1002/2016JB013458
Han G, Ma Z, Chen N, Yang J, Chen N (2015) Coastal sea level projections with improved accounting for vertical land motion. Sci Rep 5:16085. https://doi.org/10.1038/srep16085
Holgate SJ, Matthews A, Woodworth PL, Rickards LJ, Tamisiea ME, Bradshaw E, Foden PR, Gordon KM, Jevrejeva S, Pugh J (2013) New data systems and products at the permanent service for mean sea level. J Coast Res 29(3):493–504. https://doi.org/10.2112/JCOASTRES-D-12-00175.1
Huang Y, Wang Q, Hao M, Zhou S (2018) Fault slip rates and seismic moment deficits on major faults in Ordos constrained by GPS observation. Sci Rep 8:16192. https://doi.org/10.1038/s41598-018-34586-2
Ingebritsen SE, Galloway DL (2014) Coastal subsidence and relative sea level rise. Eviron Res Lett 9:091002. https://doi.org/10.1088/1748-9326/9/9/091002
Jevrejeva S, Moore JC, Grinsted A, Matthews AP, Spada G (2014) Trends and acceleration in global and regional sea levels since 1807. Glob Planet Change 113:11–22. https://doi.org/10.1016/j.gloplacha.2013.12.004
Jiang Y, Dixon T, Wdowinski S (2010) Accelerating uplift in the North Atlantic region as an indicator of ice loss. Nat Geosci. https://doi.org/10.1038/ngeo845
Karegar MA, Dixon TH, Malservisi R (2015) A three-dimensional surface velocity field for the Mississippi delta: implications for coastal restoration and flood potential. Geology 43(6):519–522. https://doi.org/10.1130/G36598.1
Karegar MA, Dixon TH, Malservisi R, Kusche J, Engelhart SE (2017) Nuisance flooding and relative sea level rise: the importance of present-day land motion. Sci Rep 7:11197. https://doi.org/10.1038/s41598-017-11544-y
Kierulf HP, Steffen H, Simpson MJR, Lidberg M, Wu P, Wang H (2014) A GPS velocity field for Fennoscandia and a consistent comparison to glacial isostatic adjustment models. J Geophys Res Solid Earth 119(8):6613–6629. https://doi.org/10.1002/2013JB010889
Kleinherenbrink M, Riva R, Frederikse T (2018) A comparison of methods to estimate vertical land motion trends from GNSS and altimetry at tide gauge stations. Ocean Sci 14(2):187–204. https://doi.org/10.5194/os-14-187-2018
Klos A, Bogusz J, Figurski M, Gruszczynski M (2016) Error analysis of European IGS stations. Stud Geophys Geod 60(1):17–34. https://doi.org/10.1007/s11200-015-0828-7
Klos A, Olivares G, Teferle FN, Hunegnaw A, Bogusz J (2018) On the combined effects of periodic signals and colored noise on velocity uncertainties. GPS Solut 22:1. https://doi.org/10.1007/s10291-017-0674-x
Kusche J, Uebbing B, Rietbroek R, Shum CK, Khan Z (2016) Sea level budget in the Bay of Bengal (2002–2014) from GRACE and altimetry. J Geophys Res Oceans 121(2):1194–1217. https://doi.org/10.1002/2015JC011471
Langbein J, Bock Y (2004) High-rate real-time GPS network at Parkfield: utility for detecting fault slip and seismic displacements. Geophys Res Lett. https://doi.org/10.1029/2003GL019408
Langbein J, Johnson H (1997) Correlated errors in geodetic time series: implications for time-dependent deformation. J Geophys Res Solid Earth 102(B1):591–603. https://doi.org/10.1029/96JB02945
Legeais J-F et al (2018) An improved and homogeneous altimeter sea level record from the ESA Climate Change Initiative. Earth Syst Sci Data 10(1):281–301. https://doi.org/10.5194/essd-10-281-2018
Merrifield MA, Merrifield ST, Mitchum GT (2009) An anomalous recent acceleration of global sea level rise. J Clim. https://doi.org/10.1175/2009JCLI2985.1
Moon J-H, Lee J (2016) Shifts in multi-decadal sea level trends in the east/Japan sea over the past 60 years. Ocean Sci J 51(1):87–96. https://doi.org/10.1007/s12601-016-0008-x
Parsons T (2006) Tectonic stressing in California modeled from GPS observations. J Geophys Res Solid Earth 111(B3):B03407. https://doi.org/10.1029/2005JB003946
Peltier WR, Argus DF, Drummond R (2015) Space geodesy constrains ice-age terminal deglaciation: the global ICE-6G_C (VM5a) model. J Geophys Res Solid Earth 120(1):450–487. https://doi.org/10.1002/2014JB011176
Rebischung P, Altamimi Z, Ray J, Garayt B (2016) The IGS contribution to ITRF2014. J Geod 90(7):611–630. https://doi.org/10.1007/s00190-016-0897-6
Riva REM, Frederikse T, King MA, Marzeion B, van den Broeke M (2017) Brief communication: the global signature of post-1900 land ice wastage on vertical land motion. Cryosphere 11(3):1327–1332. https://doi.org/10.5194/tc-11-1327-2017
Royston S, Watson CS, Legresy B, King MA, Church JA, Bos MS (2018) Sea level trend uncertainty with Pacific climatic variability and temporally-correlated noise. J Geophys Res Oceans 123(3):1978–1993. https://doi.org/10.1002/2017JC013655
Schumacher M, King MA, Rougier J, Sha Z, Khan SA, Bamber JL (2018) A new global GPS dataset for testing and improving modelled GIA uplift rates. Geophys J Int 214(3):2164–2176. https://doi.org/10.1093/gji/ggy235
Steffen H, Wu P (2011) Glacial isostatic adjustment in Fennoscandia—a review of data and modeling. J Geodyn 52(3–4):169–204. https://doi.org/10.1016/j.jog.2011.03.002
Thompson PR, Merrifield MA (2014) A unique asymmetry in the pattern of recent sea level change. Geophys Res Lett 41(21):7675–7683. https://doi.org/10.1002/2014GL061263
Trisirisatayawong I, Naeije M, Simons W, Fenoglio-Marc L (2011) Sea level change in the Gulf of Thailand from GPS-corrected tide gauge data and multi-satellite altimetry. Glob Planet Change 76(3–4):137–151. https://doi.org/10.1016/j.gloplacha.2010.12.010
Williams SDP (2003) The effect of coloured noise on the uncertainties of rates estimated from geodetic time series. J Geod 76(9–10):483–494. https://doi.org/10.1007/s00190-002-0283-4
Williams SDP, Bock Y, Fang P, Jamason P, Nikolaidis RM, Prawirodirdjo L, Miller M, Johnson DJ (2004) Error analysis of continuous GPS position time series. J Geophys Res. https://doi.org/10.1029/2003JB002741
Woodworth PL, White NJ, Jevrejeva S, Holgate SJ, Church JA, Gehrels WR (2009) Evidence for the accelerations of sea level on multi-decade and century timescales. Rev Int J Climatol 29(6):777–789. https://doi.org/10.1002/joc.1771
Wӧppelmann G, Marcos M (2016) Vertical land motion as a key to understand sea level change and variability. Rev Geophys 54(1):64–92. https://doi.org/10.1002/2015RG000502
Wӧppelmann G, Letetrel C, Santamaria A, Bouin M-N, Collilieux X, Altamimi Z, Williams SDP, Martin Miguez B (2009) Rates of sea level change over the past century in a geocentric reference frame. Geophys Res Lett. https://doi.org/10.1029/2009GL038720
Acknowledgements
We thank the IGS for providing the daily position time series and the post-seismic deformation models: http://acc.igs.org/reprocess2.html, http://itrf.ign.fr/ITRF_solutions/2014/psd.php, the ESA CCI initiative for providing satellite radar altimetry data: http://www.esa-sealevel-cci.org, the PSMSL service for tide gauge observations: http://www.psmsl.org/, the USGS for providing the list and coordinates of recent earthquakes: https://earthquake.usgs.gov/earthquakes/, the NOAA for providing the PDO index: https://www.esrl.noaa.gov/psd/gcos_wgsp/Timeseries/PDO/ and Di Lorenzo et al. (2008) for providing the NPGO index. This research is financed by the Military University of Technology, Faculty of Civil Engineering and Geodesy Young Scientists Development funds (Grant Number RMN 852/2018). Anna Klos is supported by the Foundation for Polish Science (FNP) (Grant Number START 2018). Machiel Bos is sponsored by National Portuguese funds through FCT as part of the project IDL-FCT- UID/GEO/50019/2013 and Grant Number SFRH/BPD/89923/2012.
Author information
Authors and Affiliations
Corresponding author
Additional information
Publisher's Note
Springer Nature remains neutral with regard to jurisdictional claims in published maps and institutional affiliations.
Electronic supplementary material
Below is the link to the electronic supplementary material.
Rights and permissions
Open Access This article is distributed under the terms of the Creative Commons Attribution 4.0 International License (http://creativecommons.org/licenses/by/4.0/), which permits unrestricted use, distribution, and reproduction in any medium, provided you give appropriate credit to the original author(s) and the source, provide a link to the Creative Commons license, and indicate if changes were made.
About this article

Cite this article
Klos, A., Kusche, J., Fenoglio-Marc, L. et al. Introducing a vertical land motion model for improving estimates of sea level rates derived from tide gauge records affected by earthquakes. GPS Solut 23, 102 (2019). https://doi.org/10.1007/s10291-019-0896-1
Received:
Accepted:
Published:
DOI: https://doi.org/10.1007/s10291-019-0896-1