
Abstract
P-graph causality maps were recently proposed as a methodology for systematic analysis of intertwined causal chains forming network-like structures. This approach uses the bipartite representation of P-graph to distinguish system components (“objects” represented by O-type nodes) from the functions they perform (“mechanisms” represented by M-type nodes). The P-graph causality map methodology was originally applied for determining structurally feasible causal networks to enable a desirable outcome to be achieved. In this work, the P-graph causality map methodology is extended to the analysis of vicious networks (i.e., causal networks with adverse outcomes). The maximal structure generation algorithm is first used to assemble the problem elements into a complete causal network; the solution structure generation algorithm is then used to enumerate all structurally feasible causal networks. Such comprehensive analysis gives insights on how to deactivate vicious networks through the removal of keystone objects and mechanisms. The extended methodology is illustrated with an ex post analysis of the 1984 Bhopal industrial disaster. Prospects for other applications to sustainability issues are also discussed.
Graphical abstract

Similar content being viewed by others

Avoid common mistakes on your manuscript.
Introduction
Many accidents and disasters happen as a confluence of multiple contributing factors. The interdependencies that lead to such adverse events are often only clearly seen in hindsight, since the human mind is inherently limited in its ability to grasp causal chains (Trope and Liberman 2010). Labib and Read (2013) argue that the systematic ex post analysis of such failures can reveal general insights on how to prevent the occurrence of similar events in the future. In particular, reliability engineering techniques such as fault tree analysis (FTA) and reliability block diagrams (RBD) are useful for facilitating analysis and supporting future decisions. These reliability engineering tools provide the capability to systematically map interdependencies that can lead to cascading failures in complex systems. However, such techniques are unable to deal with systems with causal feedback loops; circular logic in vicious cycles is treated as a model flaw that needs to be removed prior to analysis (Lim et al. 2012). In this work, the premise is that such simplification leads to a loss of fidelity in modelling the true nature of causality in complex systems, where network-like structures are more likely to occur than simple linear causal chains. The term vicious network is used here as a generalization of vicious cycles; a vicious network is defined as a network-like structure of intertwined causal chains with adverse outcomes.
Axelrod (1976) first proposed causality maps as a means to represent interactions among problem elements in sociopolitical systems. Eden (2004) argued that systematic mapping allows network properties of the system to be used to achieve specific goals (Eden 2004). The concept was extended to fuzzy cognitive maps (FCM) by Kosko (1986); as originally conceived, FCM used a normalized numerical scale to quantify the strength of influences among problem elements, based on the judgment of an expert analyst. Kosko (1988) also proposed that the judgment of multiple experts can be merged into a single FCM. The development of techniques to train FCMs using empirical data led to a diversification of its applications (Papageorgiou and Salmeron 2013). Some of these applications of FCM were directed at adverse events such as oil spills (Kang et al. 2016) and cyclones (Singh and Chudasama 2017). Felix et al. (2019) gave a recent survey of FCM approaches and software. During the course of its evolution, FCM has proven to be a powerful tool for supporting decisions involving systems with multiple positive and negative feedback loops. However, the FCM framework has two main weaknesses. First, it requires the user to have a global mental picture of the problem being analyzed; this is a critical limitation in the case of very large, complex systems for which a “big picture” is difficult to visualize. Second, the type or nature of influences among problem elements in an FCM cannot be readily distinguished. Unambiguous representation of interdependencies or causalities is not possible in conventional FCM. To address these issues, Tan et al. (2020) recently proposed the P-graph causality map framework. The technique was originally developed for systems with positive outcomes; there remains a clear research gap in applying it to vicious networks.
In this work, a new application of P-graph causality maps is developed to address the problem of deactivating vicious networks using only structural information. This use differs from the original application, which focused on ensuring the attainment of a desired outcome (Tan et al. 2020). Due to space constraints, the discussion in this work focuses only on departures from the original P-graph causality map; readers may refer to the earlier paper for details of the methodology. This paper is organized as follows. The next section gives the formal problem statement. Then, the P-graph causality map methodology and the general P-graph framework are discussed. The technique is then demonstrated using the 1984 Bhopal disaster as a case study. Following the case study, general implications for the use of P-graph causality maps for industrial accident prevention, disaster preparedness, and sustainable development are discussed. Conclusions are then given and some directions for future research are suggested.
Formal problem statement
The formal problem statement may be stated as follows. Given:
-
An external input influence or prerequisite into the system;
-
A potential adverse system outcome;
-
A set of tangible and intangible system components or objects;
-
A set of locally specified input and output influences for each system component;
The analysis aims to determine (a) the maximal causality map which contains all possible influences that exist among system components, (b) all of the structurally feasible causality maps that lead to the adverse outcome, and (c) the criticality of each system component as a contributor to the undesired adverse outcome. The purpose of the analysis is to gain insights on potential strategies to deactivate the vicious network.
P-graph causality maps
P-graph causality maps were recently proposed by Tan et al. (2020) as a methodology for the analysis of multiple causal chains forming a network structure. The initial work focused on the problem of understanding how to ensure the structural feasibility of networks leading to desirable outcomes; however, the same approach can be modified for the current problem of deactivating vicious networks. The methodology is based on the P-graph framework, which was originally developed by Friedler et al. (1992a) as a rigorous combinatorial framework for solving process network synthesis (PNS) problems in plant design. Since its inception, the basic P-graph framework has been modified and applied to various specialized problems in process engineering (Friedler et al. 2019). In the previous decade, progress in P-graph research led to both topical and geographic diversification in the literature (Varbanov et al. 2017). In addition, there have been significant recent developments in using P-graph to solve structurally analogous PNS-like problems outside of the traditional process engineering domain (Tan et al. 2018). For example, P-graph has been used to model economic networks (Aviso et al. 2015), socio-ecological networks (Lao et al. 2020), and decision networks (Low et al. 2020).
P-graph methodology is based on a bipartite graph consisting of O-type and M-type nodes that were originally meant to represent processes and streams in PNS problems. In P-graph causality maps, O-type nodes represent objects (equivalent to problem elements in FCM), while M-type nodes represent different mechanisms by which objects in the system influence each other. The inputs and outputs of each O-type node describe local or direct causal relationships. It is assumed here that the only available information is the presence or absence of causal links; accounting for the strength of causality is beyond the scope of the current methodology. This assumption allows the method to be used prospectively for applications even when the available information is very sparse. The M-type nodes are further classified into analogs for raw materials (prerequisites), intermediates, and products (outcomes). Using two different kinds of nodes addresses one major weakness of FCM by allowing unambiguous modelling of causality (Tan et al. 2020). Five axioms are the basis for the development of component algorithms of the P-graph framework (Friedler et al. 1992b). These axioms were adapted for P-graph causality maps. For brevity, they are not stated here; the reader can refer to the previous work by Tan et al. (2020) for details.
The P-graph framework consists of three component algorithms. Maximal structure generation (MSG) performs the algorithmic generation of a complete, rigorous, and non-redundant network (Friedler et al. 1993). MSG requires only for system components to be properly specified; assembly into the maximal structure is automated and is thus guaranteed to be free of gross errors (Kovács et al. 2000). The network assembly capability of P-graph allows it to be used with other modelling techniques, such as mathematical programming (Bertók et al. 2013a) and Petri nets (Lakner et al. 2017). In the case of P-graph causality maps, MSG addresses another major weakness of FCM by eliminating the need for the user to have a global understanding of the network structure. All that is required is to correctly specify objects and their local influences via mechanisms; this feature also enables multiple experts, each of whom understands only part of the overall problem, to combine their localized knowledge into a complete representation of the global causality network (Tan et al. 2020).
The maximal structure is a superset of all structurally feasible P-graph causality maps. The solution structure generation (SSG) algorithm can be used to enumerate these causality maps as a solution structure (Friedler et al. 1992a). Every solution structure represents a plausible causality network that can be analyzed further using other techniques (Tan et al. 2020). However, for purposes of deactivating vicious networks, the structurally infeasible networks are also of interest. They can give important insights on what decisions or actions to take to disrupt an undesirable chain of events. This aspect was not explored in the original P-graph causality map paper, which was primarily concerned with positive outcomes (Tan et al. 2020).
The third algorithm of the P-graph framework is accelerated branch-and-bound (ABB), which allows for rapid optimization of PNS problems as a special class of mixed-integer programming (MIP) problems by capitalizing on PNS logic (Friedler et al. 1996). Use of ABB is beyond the scope of the current state of P-graph causality map methodology. There are also important links between P-graph and reliability engineering which result from the need to design reliable systems with adequate levels of redundancy (Süle et al. 2018). This approach has been applied to supply chain planning (Bertók et al. 2013b) and process design problems (Orosz and Friedler 2019). Although translating RBD and FTA into P-graph form results in an acyclic network, the P-graph framework itself has no such inherent limitation in handling feedback loops. The P-graph causality map method takes advantage of the capability to handle such loops to allow deeper insights to be gained during problem analysis (Tan et al. 2020).
The P-graph causality map methodology for vicious networks can be summarized by the following steps:
-
1.
Define the objects (O-type nodes) and their associated mechanisms (M-type nodes) that comprise the system. The inputs and outputs of each O-type node describe the local causal relationships as they are understood by the analyst.
-
2.
Use MSG to generate the maximal causality map.
-
3.
Use SSG to enumerate all the structurally feasible causality maps.
-
4.
Determine the criticality of each object based on the normalized frequency of occurrence in the solutions enumerated via SSG, based on the procedure described previously (Tan et al. 2020).
-
5.
Inspect the previously enumerated causality maps and identify viable actions to be considered to deactivate the vicious network.
P-graph models can be implemented using the open access platform hosted by the University of Pannonia (P-graph Studio 2020), or using a stand-alone implementation such as the Visual Basic for Applications (VBA) program that accompanies the paper by Lao et al. (2020). The former option is used in the case study that follows.
Case study
The case of the 1984 Bhopal disaster is used here to demonstrate the use of the P-graph causality map for modelling adverse events. Note that the primary purpose of the case study is to illustrate the P-graph causality map framework via a well-studied historical example. The disaster was caused by the failure of the pesticide plant of Union Carbide India Limited (UCIL); the failure then led to the release of stored methyl isocyanate (MIC) (Chouhan 2005). The resulting gas cloud released from the plant reached the nearby city of Bhopal, leading to over 3000 fatalities based on official reports. Unofficial estimates are even higher, with up to 20,000 eventual deaths resulting from the disaster; the number of people afflicted with various health impacts is also said to be an order of magnitude larger (Labib 2014).
As one of the worst industrial accidents in history, the Bhopal disaster has been subjected to repeated analysis in the literature. An account focusing on proximate causes of the accident has been given by a former UCIL employee (Chouhan 2005); corporate outlook based on indiscriminate profit-seeking and cost-cutting has also been blamed as the ultimate cause (Matilal and Adhikari 2020). A balanced account that considers the strategic and operational factors that contributed to the disaster is given by Labib (2014). In addition, different modelling techniques have been applied to the ex post analysis of the Bhopal disaster. The core reliability engineering tools, RBD and FTA, have been used most often (Labib 2014). Other works have used multi-model hybrid frameworks combining RBD and FTA with other techniques. Ishizaka and Labib (2014) used crisis tree analysis (CTA), the analytic hierarchy process (AHP), and mathematical programming. Stephen and Labib (2018) combined RBD, FTA, and AHP with failure mode, effect, and criticality analysis (FMECA), house of quality (HoQ), and decision-making grid (DMG) techniques into a hybrid framework for this industrial accident. Tan et al. (2016) analyzed the disaster using graphical pinch analysis. These model-based analyses provide important insights on how the confluence of different factors led to the Bhopal disaster; however, the results are arguably weakened due to reliability engineering techniques being inherently unable to account for feedback loops in causality networks. The current analysis using P-graph causality maps overcomes these limitations. The P-graph causality map analysis is performed based on information drawn from the account of Chouhan (2005) as an ex-UCIL employee, and from subsequent analyses from corporate (Matilal and Adhikari 2020) and network system (Labib 2014) perspectives. Table 1 lists the objects (O-type nodes) and mechanisms (M-type nodes) in the case study, based on the account given by Labib (2014). Objects represent components of the system state, while mechanisms are influences among objects that cause changes in their states. Taking a poor strategic outlook (M1) from the business standpoint and making incorrect design decisions (M2) are both prerequisites (raw material analogs); only solutions where both are present are considered in the subsequent analysis. Bhopal citizens dying is the adverse final outcome (or product analog) of the system (M10).
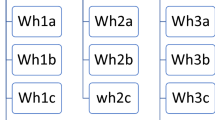
The relationships among the objects and mechanisms nodes based on Labib (2014) are summarized in Table 2. It can be seen that the inputs and outputs into each object can be identified based only on knowledge of local interactions. At this stage, the analyst does not need to have a global picture of the entire vicious network; it is further assumed that the actual magnitude or strength of causality among elements is unknown. The subsequent analysis is based only on structural features of the P-graph causality map. Using MSG, the maximal causality map shown in Fig. 1 can be automatically generated using the information in Table 2. The blue-colored nodes indicate various feedback loops present in the vicious network. A total of seven feedback loops are identified and listed in Table 3. These loops represent vicious cycles for which linear cause and effect relationships are difficult to define. They also represent important opportunities to weaken the vicious network by removing specific objects.

Maximal causality map of the case study
By implementing the SSG algorithm, a total of 149 structurally feasible causality maps are identified. However, further screening these vicious networks to just those where both M1 and M2 are present reduces the total number of structures to 57. This reduction is based on the identification of M1 and M2 in the literature as the root causes of the disaster (Labib, 2014). Thus, most of the 512 (29) possible combinations of objects cannot form structurally feasible networks. Examination of these structures shows that certain components appear more frequently, or are more critical, than others. Tan et al. (2020) defined the criticality index (ICi) of the ith O-type node as the number of times it occurs in the solutions (Ni) normalized relative to the total number of enumerated structures. Both of these indices are given in the last two rows of Table 4.
Table 4 also gives a more detailed breakdown of the frequency of occurrence of each object in networks of different degrees of complexity. A minimum number of three objects is needed to form a structurally feasible network, which is known as the minimal causality map for the system; this solution is of particular interest and will be examined in more detail later. The most complex network is the maximal causality map which contains all nine objects. The entries in the cells of Table 4 indicate the number of times an object occurs in a structure that consists of m objects. The full list of 57 structurally feasible vicious networks is given in the appendix; due to space constraints, only selected solutions are discussed next.
Figure 2 shows the minimal causality map for the case study. This solution contains just three objects, poor operational decision-making (O1), flawed plant design (O6), inadequate links with local community (O9), each with ICi = 1, which comprise the core of the vicious network. Removal of any of these objects immediately leads to structural infeasibility and averts the disaster, since any remaining objects cannot form a vicious network. The first two objects are frequently mentioned as critical contributing factors in previous analyses of the disaster (Chouhan 2005). The proximate cause was a series of blunders by plant management and personnel that led to the catastrophic release of the MIC. The plant itself was a low-cost version of a similar Union Carbide facility in the USA, but with inadequate safety systems and inappropriate process equipment construction materials (Ishizaka and Labib 2014). A former employee has stated that the plant was “an accident waiting to happen” (Chouhan 2005). Lack of coordination with the Bhopal local government is mentioned by Labib (2014) in his narrative account, but does not appear as a unique element in his FTA. Loss of lives in Bhopal could have been reduced, had there been safety protocols and evacuation plans in place via a corporate information campaign. In addition to the core, it is also possible to determine by inspection that the minimal causality map has two possible paths from either prerequisite (M1 or M2) to the outcome (M10). We define the strength of the vicious network as the number of such distinct paths. The two paths are M1 → O1 → M9 → O9 → M10 and M2 → O6 → M8 → O9 → M10.

Minimal causality map of the case study
Less critical objects do not occur as frequently in the 57 solutions, but contribute to the vicious network by providing additional paths from the prerequisites to the outcome. Removal of such objects does not guarantee the deactivation of the vicious network. For example, Fig. 3a shows a solution with six objects consisting of reduced financial resources (O2), low employee morale (O3), and deteriorated plant condition (O7) in addition to the core. These three objects are involved in multiple feedback loops. For instance, poor operational decision-making (O1) led to reduced financial resources (O2) via declining profits (M3). The reduced financial resources (O2) then led to poor employee morale (O3) due to layoffs (M4). Low morale (O3) then led to poor plant conditions (O7) as a result of personnel taking maintenance shortcuts (M6). Prior to the accident, the state of the plant (O7) further exacerbated losses (M3) to strain UCIL finances further (O2). It should also be possible to identify other loops in the vicious network in Fig. 3a, as well as branches leading to the final outcome. These feedback loops lead to new paths through the network. Since it is always possible to find a new path by taking an additional iteration through a loop, the number of distinct potential paths is unlimited. Due to the presence of feedback loops, the strength of this vicious network is infinite.

Example of a solution structure a before and b after the removal O7
Figure 3b shows the effect of removing poor plant conditions (O7). The previously discussed feedback loop is interrupted, resulting in a much sparser vicious network. Removing O7 reduces the strength of the network from infinity to 5. In addition to the two paths in the minimal causality map, there are three additional ones (M1 → O1 → M3 → O2 → M4 → O3 → M9 → O9 → M10; M1 → O1 → M4 → O3 → M9 → O9 → M10; and M2 → O6 → M3 → O2 → M4 → O3 → M9 → O9 → M10). Since multiple paths still remain that lead to the outcome, this measure by itself is not sufficient to deactivate the vicious network. The propensity for the accident to occur would still have been present, even had the plant been in good condition, due to poor operational decision-making by management (O1), coupled with a fundamentally flawed design (O6) and lack of links with Bhopal authorities (O9). This propensity would have been reinforced by strained finances (O2) and low morale (O3). In particular, human error due to the latter might still plausibly cause catastrophic release of MIC even with properly maintained process equipment.
Similar analysis can be done for the other enumerated solutions in the appendix. The criticality and strength indexes can be used to evaluate the component objects and the vicious networks that they form. Note that the analysis is based only on structural information (i.e., the presence or absence of local causal links) and does not account for differences in strength of influence. The P-graph Studio files can be shared with interested readers upon request addressed to the corresponding author.
General implications
The case study discussed has general implications for effective industrial accident prevention and disaster preparedness based on a historical case study. Such ex post analysis can lead to insights that can prevent future disasters (Labib 2014). The P-graph causality map approach can be used in combination with reliability engineering techniques, which have proven useful for the analysis of accidents caused by strategic or operational human error (Labib and Read 2013), as well as those triggered by natural disasters (Labib 2015). In addition, technological advances will require better tools to support human decision-making. The increasing complexity of modern industrial processes has created new challenges in ensuring safety in cyber-physical systems (Adriaensen et al. 2019). Similarly, Santos et al. (2020) point out the need for a unified multidimensional framework to properly manage risks resulting from disasters. Use of this method for prospective analysis of possible future adverse events is possible using the same steps as illustrated in the case study. One key advantage is that the P-graph causality map approach can be used with sparse information that is inherent in prospective applications; analysts need to specify only the presence or absence of causal linkages around each O-type node, without having to provide estimates of the strength or extent of causality. Such applications are possible because problem analysis with P-graph causality maps focuses only on structural features.
Other than applications in industrial safety and disaster risk management, P-graph causality maps can be used to disentangle wicked problems that occur in other domains. These wicked problems often result from vicious cycles and vicious networks in complex systems that include social, political, and economic dimensions (Andersson and Törnberg 2018). Many contemporary sustainability issues fit this description. For example, plastic pollution is now considered to be a major emerging environmental problem. The issue has grown despite the emergence of conceptual frameworks such as sustainable consumption and the circular economy (CE). The extent of the danger posed by microplastics still remains unclear, due to the developing state of scientific knowledge on the transport and accumulation in different environmental compartments; health impacts upon ingestion are also not well understood (Petersen and Hubbart 2021). The availability of viable technologies to recycle commercial polymers is evidently a necessary–but not sufficient–condition for managing plastic pollution. Social, economic, and regulatory dimensions can act as barriers that form a vicious network. For example, the potential for plastic recycling is hindered by volatility of oil prices, unfavorable public perception of recycled plastic quality, and poor waste management practices in developing countries (Carey 2017). The decision of companies to invest in practices to promote the sustainable consumption of plastics requires anticipation of the response of their customers (Chiu et al. 2020). It is possible for both industry and consumers to be stuck in a vicious cycle due to feedback effects. The problem has also been compounded by the recent plastic surge in the COVID-19 pandemic (Klemeš et al. 2020). There have been recent calls for a global treaty to manage plastic pollution (e.g., Nordic Council of Ministers 2020), with the proponents recognizing the need for a holistic rather than piecemeal approach. Given its complexity, the plastic pollution problem appears to be intractable unless a global picture of factors and barriers emerges.
Attempts to solve problems of this type very often meet with failure, or cause unintended side effects, due to experts and stakeholders falling into the trap of the proverbial blind men describing the elephant. With its capability to assemble fragments of localized knowledge into a coherent global network of interactions, the P-graph causality map can be a powerful tool for participatory modelling of complex, wicked sustainability problems. Subjectivity is inherent in the analysis of scenarios of future adverse events. Rather than seeking to eliminate subjectivity from the analysis of problems, the P-graph causality map provides a framework for organizing subjective knowledge of expert analysts into coherent form, to facilitate both analysis and communication. The resulting causality map formally encodes the collective mental picture of the problem based on the consolidated perspectives of the contributing expert analysts and stakeholders. Thus, future studies on socio-technical systems will need to elucidate problematiques as systems of interrelated problems from the minds of the participating stakeholders (Promentilla et al. 2016). Only such a unified approach can unravel the underlying complexity emerging from such wicked problems.
Conclusion
In this work, a P-graph causality map approach to the analysis of vicious networks has been developed. This extension generalizes the capability of the P-graph causality map beyond its original scope. A new index of network strength has also been proposed to complement the previously proposed criticality index for component objects. To demonstrate this technique, an ex post analysis of the 1984 Bhopal disaster was performed. The case study provides key lessons on the general implications of the new methodology, particularly for the analysis and management of vicious networks that are increasingly prevalent in many seemingly intractable global sustainability issues. Examples of contemporary problems that are potentially amenable to modelling using P-graph causality maps include plastic pollution, climate change, natural resource depletion, biodiversity loss, and the potential emergence of future pandemics.
This work, as well as the previous paper (Tan et al. 2020), has thus far been limited to combinatorial and structural aspects of P-graph causality networks. Future work can focus on subsequent steps in the methodology after network generation. If data on or estimates of the strengths of causality links are given, the ABB algorithm can be used to optimize a system in a manner analogous to PNS problems. Such an extension will require quantification of the magnitudes of influences. Conventional techniques for training FCMs from empirical data can also be adapted to be applicable to the fundamentally different network representation used in P-graph causality maps.
Data availability
The data used in this work are available upon request as P-graph Studio files.
References
Adriaensen, A., Decré, W., Pintelon, L., 2019, Can complexity-thinking methods contribute to improving occupational safety in Industry 4.0? A review of safety analysis methods and their concepts. Safety, 5, Article 65
Andersson C, Törnberg P (2018) Wickedness and the anatomy of complexity. Futures 95:118–138
Aviso KB, Cayamanda CD, Solis FDB, Danga AMR, Promentilla MAB, Yu KDS, Santos JR, Tan RR (2015) P-graph approach for GDP-optimal allocation of resources, commodities and capital in economic systems under climate change-induced crisis conditions. J Clean Prod 92:308–317
Axelrod R (1976) Structure of Decision: The Cognitive Maps of Political Elites. Princeton University Press, Princeton, NJ, USA
Bertók B, Barany M, Friedler F (2013a) Generating and analyzing mathematical programming models of conceptual process design by P-graph software. Ind Eng Chem Res 52:166–171
Bertók B, Kalauz K, Süle Z, Friedler F (2013b) Combinatorial algorithm for synthesizing redundant structures to increase reliability of supply chains: application to biodiesel supply. Ind Eng Chem Res 52:181–186
Carey J (2017) On the brink of a recycling revolution? Proc Natl Acad Sci USA 114:612–616
Chiu, A.S.F., Aviso, K.B., Baquillas, J., Tan, R.R., 2020, Can disruptive events trigger transitions towards sustainable consumption? Cleaner and Responsible Consumption, 1, Article 100001.
Chouhan TR (2005) The unfolding of Bhopal disaster. J Loss Prev Process Ind 18:205–208
Eden C (2004) Analyzing cognitive maps to help structure issues or problems. Eur J Oper Res 159:673–686
Felix G, Napoles G, Falcon R, Froelich W, Vanhoof K, Bello R (2019) A review on methods and software for fuzzy cognitive maps. Artif Intell Rev 52:1707–1737
Friedler F, Tarjan K, Huang YW, Fan LT (1992a) Combinatorial algorithms for process synthesis. Comput Chem Eng 16:S313–S320
Friedler F, Tarján K, Huang YW, Fan LT (1992b) Graph-theoretic approach to process synthesis: axioms and theorems. Chem Eng Sci 47:1973–1988
Friedler F, Tarjan K, Huang YW, Fan LT (1993) Graph-theoretic approach to process synthesis: polynomial algorithm for maximal structure generation. Comput Chem Eng 17:929–942
Friedler F, Varga JB, Feher E, Fan LT (1996) Combinatorially Accelerated Branch-and-Bound Method for Solving the MIP Model of Process Network Synthesis. In: Floudas CA, Pardalos PM (eds) State of the Art in Global Optimization: Computational Methods and Applications. Springer, Dordrecht, Netherlands, pp 609–626
Friedler F, Aviso KB, Bertók B, Foo DCY, Tan RR (2019) Prospects and challenges for chemical process synthesis with P-graph. Curr Opin Chem Eng 26:58–64
Ishizaka A, Labib A (2014) A hybrid and integrated approach to evaluate and prevent disasters. J Op Res Soc 65:1475–1489
Kang J, Zhang J, Bai Y (2016) Modeling and evaluation of the oil-spill emergency response capability based on linguistic variables. Mar Pollut Bull 113:293–301
Klemeš JJ, Fan YV, Tan RR, Jiang P (2020) Minimising the present and future plastic waste, energy and environmental footprints related to COVID-19. Renew Sustain Energy Rev 127:109883
Kosko B (1986) Fuzzy cognitive maps. Int J Man Mach Stud 24:65–75
Kosko B (1988) Hidden patterns in combined and adaptive knowledge networks. Int J Approx Reason 2:377–393
Kovács Z, Ercsey Z, Friedler F, Fan LT (2000) Separation-network synthesis: global optimum through rigorous super-structure. Comput Chem Eng 24:1881–1900
Labib A (2014) Learning from Failures: Decision Analysis of Major Disasters. Elsevier, Oxford, UK
Labib A (2015) Learning (and unlearning) from failures: 30 years on from Bhopal to Fukushima an analysis through reliability engineering techniques. Process Saf Environ Prot 97:80–90
Labib A, Read M (2013) Not just rearranging the deckchairs on the Titanic: learning from failures through risk and reliability analysis. Saf Sci 51:397–413
Lakner, R., Friedler, F., Bertók, B., 2017, Synthesis and Analysis of Process Networks by Joint Application of P-graphs and Petri Nets. In: van der Aalst W., Best E. (eds) Application and Theory of Petri Nets and Concurrency. PETRI NETS 2017. Lecture Notes in Computer Science, vol 10258. Springer, Cham, Switzerland, p. 309–329.
Lao A, Cabezas H, Orosz A, Friedler F, Tan R (2020) Socio-ecological network structures from process graphs. PLoS ONE 15:e0232384
Lim H-G, Han S-H (2012) Systematic treatment of circular logics in a fault tree analysis. Nucl Eng Des 245:172–179
Low CX, Ng WY, Putra ZA, Aviso KB, Promentilla MAB, Tan RR (2020) Induction approach via P-Graph to rank clean technologies. Heliyon 6:e03083
Matilal S, Adhikari P (2020) Accounting in Bhopal: Making catastrophe. Critic Perspect Account 72:102123
Nordic Council of Ministers, 2020, Possible elements of a new global agreement to prevent plastic pollution. Accessed at www.nordicreport2020.com on January 4, 2021
Orosz A, Friedler F (2019) Synthesis technology for failure analysis and corrective actions in process systems engineering. Comp Aid Chem Eng 46:1405–1410
Papageorgiou E, Salmeron J (2013) A review of fuzzy cognitive map research during the last decade. IEEE Trans Fuzzy Syst 21:66–79
Petersen F, Hubbart JA (2021) The occurrence and transport of microplastics: the state of the science. Sci Total Environ 758:143936
P-graph Studio, 2020. Accessed at www.p-graph.org on January 3, 2021
Promentilla MAB, Bacudio LR, Benjamin MFD, Chiu ASF, Yu KDS, Tan RR, Aviso KB (2016) Problematique approach to analyse barriers in implementing industrial ecology in Philippine industrial parks. Chem Eng Trans 52:811–816
Santos J, Yip C, Thekdi S, Pagsuyoin S (2020) Workforce/population, economy, infrastructure, geography, hierarchy, and time (weight): reflections on the plural dimensions of disaster resilience. Risk Anal 40:43–67
Singh PK, Chudasama H (2017) Assessing impacts and community preparedness to cyclones: a fuzzy cognitive mapping approach. Clim Change 143:337–354
Stephen C, Labib A (2018) A hybrid model for learning from failures. Expert Syst Appl 93:212–222
Süle Z, Baumgartner J, Abonyi J (2018) Reliability-redundancy allocation in process graphs. Chem Eng Trans 70:991–996
Tan RR, Abd. Aziz, M.K., Ng, D.K.S., Foo, D.C.Y., Lam, H.L., (2016) Pinch analysis-based approach to industrial safety risk and environmental management. Clean Technol Environ Policy 18:2107–2117
Tan RR, Aviso KB, Klemeš JJ, Lam HL, Varbanov PS, Friedler F (2018) Towards generalized process networks: prospective new research frontiers for the P-graph framework. Chem Eng Trans 70:91–96
Tan, R.R., Aviso, K.B., Lao, A.R., Promentilla, M.A.B., 2020. P-graph causality maps. Process Integration and Optimization for Sustainability (in press, DOI: https://doi.org/10.1007/s41660-020-00147-2).
Trope Y, Liberman N (2010) Construal-level theory of psychological distance. Psychol Rev 117:440–463
Varbanov PS, Friedler F, Klemeš JJ (2017) Process network design and optimisation using P-graph: the success, the challenges and potential roadmap. Chem Eng Trans 61:1549–1554
Acknowledgements
The authors would like to thank the software development and support team behind P-graph Studio in the University of Pannonia, Hungary.
Author information
Authors and Affiliations
Corresponding author
Ethics declarations
Conflict of interest
The authors have no conflict of interest to declare.
Additional information
Publisher's Note
Springer Nature remains neutral with regard to jurisdictional claims in published maps and institutional affiliations.
Rights and permissions
About this article

Cite this article
Tan, R.R., Aviso, K.B., Lao, A.R. et al. Modelling vicious networks with P-graph causality maps. Clean Techn Environ Policy 24, 173–184 (2022). https://doi.org/10.1007/s10098-021-02096-x
Received:
Accepted:
Published:
Issue Date:
DOI: https://doi.org/10.1007/s10098-021-02096-x