
Abstract
Indentation testing has been widely used in laboratory environments to investigate the processes leading to rock fragmentation in drilling, mechanized tunneling, and mining. Rock specimens for laboratory testing are limited to finite size, potentially causing size effects that have to be accounted for when transferring results to in situ applications. We present an integrated experimental and theoretical investigation of the specimen size effect in indentation testing (a) to address the limited understanding of its causes and the lack of tools to analyze tests on variable specimen sizes and (b) to identify to what extent an indenter mimicking the shape of a cutter on a tunneling machine can be approximated by a conventional indenter geometry. We performed indentation tests on cylindrical specimens of a porous sandstone with aspect ratios (diameter/height) ranging from 0.3 to 1.7, using a blunt-truncated indenter and monitoring the fracturing process by the acoustic emission technique. A damage zone, enclosing a zone of crushed grains immediately below the indenter tip, forms and grows due to tool penetration. Eventually, all specimens failed as a result of the propagation of a sub-vertical fracture, initiated close to peak indentation pressure. Peak force, its corresponding penetration depth, and peak indentation pressure increase with specimen size, more significantly with specimen diameter than with height. We developed a semi-analytical model based on cavity-expansion theory and linear elastic fracture mechanics for the formation of the damage zone and the nucleation and propagation of the macroscopic vertical fracture, respectively, whose predictions are in good agreement with our experimental data. The observed increases of peak indentation pressure with specimen size can be explained by the effect of the free surfaces on damage zone growth rather than on fracture propagation. The model permits evaluating the specimen size effect through the ratio between two geometrical parameters, specimen diameter and tip width of the truncated indenter, which has to be larger than around 102 for the size effect to be insignificant. The model permits upscaling of experimental results to in situ conditions based on geometrical indenter parameters and commonly used material parameters.
Highlights
-
The series of indentation tests performed with the aid of acoustic emission technique reveals the significant influence of specimen size on test results.
-
The proposed novel semi-analytical model is proved useful to analyse indentation tests on variable specimen sizes and indenter geometries including indenters with a truncated tip.
-
The presented detailed mechanistic analysis for indentation tests identifies key parameters controlling rock fragmentation process and permits transferring laboratory results to in-situ applications.













Similar content being viewed by others

Abbreviations
- a 0 :
-
Half width of blunt tip
- a :
-
Cavity radius
- B :
-
Finite radius of specimens
- B g :
-
A dimensionless parameter associated with specimen geometry, (B.7)
- b :
-
Distance between onset of elastic region and the elastic–plastic boundary
- C, C v :
- c ini, c max :
-
Half of initial flaw size and the flaw size at maximum stress intensity
- D :
-
Specimen diameter
- \(D_{0}\) :
-
Initial damage parameter in Eq. (7)
- \(d, \, d_{{{\text{peak}}}} , \, d_{p\max }\) :
-
Penetration depth, its value at peak force and at peak indentation pressure, respectively
- E :
-
Young’s modulus
- \(E_{i} , \, E_{{{\text{tot}}}}\) :
-
The energy of a sensor and total energy of an event
- \(F\) :
-
Indentation force
- \(f\left( m \right)\) :
-
Parameter depending on m as in Eq. (23)
- G :
-
Shear modulus
- H :
-
Specimen height
- h :
-
Strength parameter
- K I, K IC :
-
Stress intensity and Mode I fracture toughness
- K p , K d :
-
Friction and dilation parameter, respectively.
- \(K_{\phi }\) :
-
Internal friction coefficient in Eq. (7)
- k :
-
Parameter associated with cavity geometry
- m :
-
Parameter for size effect
- p :
-
Indentation pressure
- R :
-
Radius of damage zone
- \(R_{{{\text{ind}}}}\) :
-
Curvature of the indenter tip
- r :
-
Radius of element
- t 0, t 1 :
-
Starting and ending time of the voltage transient, respectively.
- ΔV IND , ΔV CEM :
-
Change in volume by indenter and cavity-expansion method
- V i :
-
Voltage of the ith sensor
- u :
-
Displacement around an expanding cavity
- v :
-
Radial velocity
- α :
-
Inclination angle of indenter with respect to horizontal plane
- β :
-
Exponent in stress in plastic region
- λ :
-
A dimensionless parameter, Eq. (28)
- µ :
-
Poisson’s ratio
- \(\sigma_{{{\text{uni}}}}\) :
-
Uniaxial compressive strength
- \(\sigma_{r} {, }\sigma_{\theta } {, }\sigma_{R} {, }\sigma_{{\theta {\text{ ,EP}}}}\) :
-
Radial stress and hoop stress around an expanding cavity, radial and hoop stress at elastic–plastic boundary
- \(\varepsilon_{r} {, }\varepsilon_{\theta } {, }\) :
-
Radial and hoop strains around an expanding cavity
- \(\phi\) :
-
Friction angle
- ψ :
-
Dilation angle
- \(\xi , \, \xi_{{\text{R}}}\) :
-
Dimensionless radius and dimensionless radius of the damage zone
- χ :
-
A dimensionless parameter, Eq. (38)
- γ :
-
A dimensionless parameter, Eq. (33)
- δ :
-
Normalized penetration depth
References
Alehossein H, Detournay E, Huang H (2000) An analytical model for the indentation of rocks by blunt tools. Rock Mech Rock Eng 33:267–284
Baud P, Vajdova V, Wong T (2006) Shear-enhanced compaction and strain localization: Inelastic deformation and constitutive modeling of four porous sandstones. J Geophys Res Solid Earth. https://doi.org/10.1029/2005JB004101
Baud P, Wong T, Zhu W (2014) Effects of porosity and crack density on the compressive strength of rocks. Int J Rock Mech Min Sci 67:202–211
Bažant P (1984) Size effect in blunt fracture: concrete, rock, metal. J Eng Mech 110:518–535
Bazant ZP, Pfeiffer PA (1987) Determination of fracture energy from size effect and brittleness number. ACI Mater J 84:463
Brace WF (1960) Behavior of rock salt, limestone, and anhydrite during indentation. J Geophys Res 1896–1977(65):1773–1788
Chen LH, Labuz JF (2006) Indentation of rock by wedge-shaped tools. Int J Rock Mech Min Sci 43:1023–1033
Chen LH, Huang KC, Chen YC (2011) Acoustic emission at wedge indentation fracture in quasi-brittle materials. J Mech 25:213–223
Cheng Y, Yang H-W (2019) Exact solution for drained spherical cavity expansion in saturated soils of finite radial extent. IJNAM 43:1594–1611
Cheng Y, Yang H-W, Sun DA (2018) Cavity expansion in unsaturated soils of finite radial extent. Comput Geotech 102:216–228
Collins I, Stimpson J (1994) Similarity solutions for drained and undrained cavity expansions in soils. Geotechnique 44:21–34
Gao XL, Jing XN, Subhash G (2006) Two new expanding cavity models for indentation deformations of elastic strain-hardening materials. IJSS 43:2193–2208
Harris DO, Bell RL (1977) The measurement and significance of energy in acoustic-emission testing. ExM 17:347–353
He X, Xu C (2016) Specific energy as an index to identify the critical failure mode transition depth in rock cutting. Rock Mech Rock Eng 49:1461–1478
Huang H, Detournay E (2008) Intrinsic length scales in tool-rock interaction. Int J Geomech 8:39–44
Huang H, Detournay E (2013) Discrete element modeling of tool-rock interaction II: rock indentation. IJNAM 37:1930–1947
Huang H, Damjanac B, Detournay E (1998) Normal wedge indentation in rocks with lateral confinement. Rock Mech Rock Eng 31:81–94
Huang K, Deng P, Liu Q, Pan Y, Liu Q, Peng X (2018) Experimental study on rock indentation using infrared thermography and acoustic emission techniques. JGE 15:1864–1877
Huang H (1999) Discrete element modeling of tool-rock interaction, University of Minnesota
ISRM (2007) The Complete ISRM Suggested Methods for Rock Characterization, Testing and Monitoring: 1974–2006, ISRM Turkish National Group and the ISRM.
Johnson KL (1970) The correlation of indentation experiments. J Mech Phys Solids 18:115–126
Johnson KL, Johnson KL (1987) Contact mechanics. Cambridge University Press, Cambridge
Klein E, Reuschlé T (2003) A model for the mechanical behaviour of Bentheim Sandstone in the Brittle Regime. PApGe 160:833–849
Klein E, Baud P, Reuschlé T, Wong T (2001) Mechanical behaviour and failure mode of Bentheim sandstone under triaxial compression. Phys Chem Earth Part A 26:21–25
Kong X, Liu Q, Lu H (2021) Effects of rock specimen size on mechanical properties in laboratory testing. J Geotech Geoenviron 147:04021013
Kou S-Q, Huang Y, Tan X-C, Lindqvist P-A (1998) Identification of the governing parameters related to rock indentation depth by using similarity analysis. Eng Geol 49:261–269
Krause M (2018) Experimental investigation of propagation mechanisms of stimulation-induced fractures under in-situ conditions. Ph.D Doctoral thesis, Ruhr-Universität Bochum
Landis EN, Baillon L (2002) Experiments to relate acoustic emission energy to fracture energy of concrete. J Eng Mech 128:698–702
Lawn BR, Evans AG (1977) A model for crack initiation in elastic/plastic indentation fields. JMatS 12:2195–2199
Lawn BR, Marshall DB (1979) Hardness, toughness, and brittleness: an indentation analysis. J Am Ceram Soc 62:347–350
Lawn B, Wilshaw TR (1993) Fracture of brittle solids. Cambridge University Press, Cambridge
Li X, Li H, Liu Y, Zhou Q, Xia X (2016) Numerical simulation of rock fragmentation mechanisms subject to wedge penetration for TBMs. Tunnel Undergr Space Technol 53:96–108
Lindqvist P-A, Hai-Hui L (1983) Behaviour of the crushed zone in rock indentation. Rock Mech Rock Eng 16:199–207
Liu J, Cao P, Han D (2016) Sequential indentation tests to investigate the influence of confining stress on rock breakage by tunnel boring machine cutter in a biaxial state. Rock Mech Rock Eng 49:1479–1495
Lockner DA (1995) Rock failure. Rock Phys Phase Relat 3:127–147
Molenda, M, Stöckhert F, Brenne S, Alber M (2015) Acoustic emission monitoring of laboratory scale hydraulic fracturing experiments. 49th US Rock Mechanics/Geomechanics Symposium. American Rock Mechanics Association
Narasimhan R (2004) Analysis of indentation of pressure sensitive plastic solids using the expanding cavity model. Mech Mater 36:633–645
Ouchterlony F (1988) Suggested methods for determining the fracture toughness of rock. Int Jo Rock Mech Mining Sci Geomech Abst 25:71–96
Park Y, Pharr G (2004) Nanoindentation with spherical indenters: finite element studies of deformation in the elastic–plastic transition regime. Thin Solid Films 447:246–250
Pournaghiazar M, Russell AR, Khalili N (2013) Drained cavity expansions in soils of finite radial extent subjected to two boundary conditions. IJNAM 37:331–352
Puttick KE (1980) The correlation of fracture transitions. J Phys D Appl Phys 13:2249–2262
Richard T (1999) Determination of strength from cutting tests. Master. University of Minnesota, Minneapolis
Roxborough FF, Phillips HR (1975) Rock excavation by disc cutter. Int J Rock Mech Mining Sci Geomech Abst 12:361–366
Scholz T, Schneider G, Munoz-Saldana J, Swain M (2004) Fracture toughness from submicron derived indentation cracks. Appl Phys Lett 84:3055–3057
Sebastiani M, Johanns KE, Herbert EG, Pharr GM (2015) Measurement of fracture toughness by nanoindentation methods: Recent advances and future challenges. Curr Opin Solid State Mater Sci 19:324–333
Stoeckhert F, Molenda M, Brenne S, Alber M (2015) Fracture propagation in sandstone and slate–Laboratory experiments, acoustic emissions and fracture mechanics. J Rock Mech Geotech Eng 7:237–249
Szwedzicki T (1998) Indentation hardness testing of rock. Int J Rock Mech Min Sci 35:825–829
Tabor, D (1984) Indentation Hardness and Its Measurement: Some Cautionary Comments. Microindentation Techniques in Materials Science and Engineering: A Symposium Sponsored by ASTM Committee E-4 on Metallography and by the International Metallographic Society, Philadelphia, PA, ASTM International: 129
Tada, H, Paris PC, Irwin GR (2000) The stress analysis of cracks handbook, The American Society of Mechanical Engieers, New York
Teale R (1965) The concept of specific energy in rock drilling. Int J Rock Mech Mining Sci Geomech Abst 2:57–73
Yadav S, Saldana C, Murthy TG (2015) Deformation field evolution in indentation of a porous brittle solid. IJSS 66:35–45
Yang H, Russell AR (2015) Cavity expansion in unsaturated soils exhibiting hydraulic hysteresis considering three drainage conditions. IJNAM 39:1975–2016
Yin LJ, Gong QM, Ma HS, Zhao J, Zhao XB (2014) Use of indentation tests to study the influence of confining stress on rock fragmentation by a TBM cutter. Int J Rock Mech Min Sci 72:261–276
Zhou Y, Lin J-S (2013) On the critical failure mode transition depth for rock cutting. Int J Rock Mech Min Sci 62:131–137
Zhou Y, Lin J-S (2014) Modeling the ductile–brittle failure mode transition in rock cutting. Eng Fract Mech 127:135–147
Zhu W, Baud P, Wong T-f (2010) Micromechanics of cataclastic pore collapse in limestone. J Geophys Res Solid Earth 115:B04405
Zietlow WK, Labuz JF (1998) Measurement of the intrinsic process zone in rock using acoustic emission. Int J Rock Mech Min Sci 35:291–299
Acknowledgements
We gratefully acknowledge the financial support by the German Science Foundation (DFG) in the framework of the Collaborative Research Centre SFB 837 “Interaction modelling in Mechanized Tunnelling” (subproject C5).
Author information
Authors and Affiliations
Corresponding author
Additional information
Publisher's Note
Springer Nature remains neutral with regard to jurisdictional claims in published maps and institutional affiliations.
Appendices
Appendix 1
1.1 Cavity Expansion in Mohr–Coulomb Rock of Finite Radial Extent
Previous applications of cavity-expansion theory to rock indentation, for example, with a regular indenter (Huang et al. 1998; Huang 1999) or a blunt tool (Alehossein et al. 2000), did not incorporate the specimen size. We modify the solutions of Huang et al. (1998) and Alehossein et al. (2000) by incorporating the stresses and displacements around a cavity in a finite specimen, introduced in previous studies (Pournaghiazar et al. 2013; Cheng et al. 2018; Cheng and Yang 2019).
1.1.1 Definition of the Problem and Notation
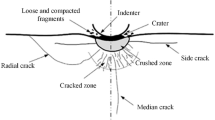
The indentation process is idealized by describing the contact surface between the indenter and the rock as a hemispherical or a semicircular dent of radius a, which is surrounded by a hemispherical or a semicircular damage zone with radius \(R\) (Fig.

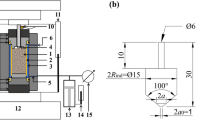
14). The semicircular dent corresponds to plane strain conditions and models a wedge indenter, while the hemi-spherically symmetric conditions apply to a cone indenter. The damage region, in turn, is surrounded by elastically deforming rock to boundary \(B\), laterally determined by the specimen radius. We use spherical (r, ω, θ) and cylindrical (r, z, θ) coordinates matching hemispherical and semicircular dent geometry, respectively, and introduce a dimensionless radius \(\xi = r/a\). Radial stress \(\sigma_{r}\) and tangential stress \(\sigma_{\theta }\) represent major and minor principal stress. We follow the engineering sign convention, i.e., compressive stresses are negative. Model parameters are shear modulus \(G\), Poisson’s ratio \(\mu\), uniaxial compressive strength \(\sigma_{{{\text{uni}}}}\), angle of internal friction \(\phi\), dilation angle \(\psi\), a parameter \(k\) varying with cavity geometry, \(k = 1\) and 2 for cylindrical and hemispherical cavity, respectively (e.g., Collins and Stimpson 1994), and the various parameters of indenter geometry, such as the inclination angle \(\alpha\) with respect to the indented specimen surface and the width of the blunt tip \(2a_{0}\).
1.1.2 Finite Elastic Region
The finite elastic region \(\xi_{{\text{R}}} \le \xi \le \xi_{{\text{B}}} \, \left( {R \le r \le B} \right)\) requires modifications of the stresses and displacements in Alehossein et al. (2000). We use the solutions by Cheng et al. (2018) for the stresses and displacements around an expanding cavity:
and
respectively, where
and
1.1.3 Plastic Region and Elastic-Plastic Boundary
In the plastic region \(1 \le \xi \le \xi_{{\text{R}}} \, \left( {a \le r \le R} \right)\), the stress states satisfy the Mohr–Coulomb failure criterion:
where
and
The stress state has to satisfy the equilibrium equation
Using the boundary condition at the cavity wall \(\sigma_{r} = - p\) (\(p\) compressive) at \(r = a\) and combining Eqs. (14) and (17) gives the stresses in the plastic region as
and
where
Stress continuity across the elastic–plastic boundary yields
and
where
Since \(f\left( m \right)\) decreases with increasing \(R/B\), i.e., decreasing distance between the elastic–plastic boundary and the specimen’s free surface, the absolute values of radial and tangential stresses at the elastic–plastic boundary, Eqs. (21) and (22), are reduced by finite specimen size.
For strains in the plastic region 1 ≤ ξ ≤ ξR (a ≤ r ≤ R), the conventional non-associative flow rule for the Mohr–Coulomb model is assumed, i.e.,
with
where \(v = {{{\text{d}}u} \mathord{\left/ {\vphantom {{{\text{d}}u} {{\text{d}}t}}} \right. \kern-\nulldelimiterspace} {{\text{d}}t}}\) denotes the radial particle velocity, and
Decomposing the total strain into elastic and plastic strains and combining Eqs. (24) and (25), Hook’s law for elastic radial and tangential strains, and the yield function (14) lead to
where \(\lambda\) is given by
The material derivative of radial stress Eq. (21) is
Substituting Eq. (29) into Eq. (37) yields
To solve this inhomogeneous differential equation for the radial particle velocity, a boundary condition is required. The material derivative of the radial displacement component, i.e., \({{{\text{d}}u} \mathord{\left/ {\vphantom {{{\text{d}}u} {{\text{d}}t}}} \right. \kern-\nulldelimiterspace} {{\text{d}}t}} = v = {{\partial u} \mathord{\left/ {\vphantom {{\partial u} {\partial t}}} \right. \kern-\nulldelimiterspace} {\partial t}} + v{{\partial u} \mathord{\left/ {\vphantom {{\partial u} {\partial r}}} \right. \kern-\nulldelimiterspace} {\partial r}}\) yields
Substituting (A.13) with \(r = R\) into Eq. (11) gives the displacement in the elastic region as
with
Combining Eqs. (32) and (31) gives
Now, Eq. (30) can be solved as an initial value problem with the boundary condition given by Eq. (34). We omit the non-linear part in the brackets on the left-hand side of Eq. (30) because, dominated by the ratio \(h/G \propto \sigma_{{{\text{uni}}}} /G\) that is of magnitude 10–2, it is much smaller than 1 for relevant material parameters. Then, Eq. (30) reduces to a linear inhomogeneous differential equation of the form:
\(y^{\prime} + a\left( \xi \right)y = f\left( \xi \right)\), Eq. (35).
with the general solution
Accordingly, the solution of Eq. (30) is
where χ is given by
1.1.4 Size of Damage Zone and Indentation Pressure
We apply the developed cavity-expansion model to the indentation problem. The displacements produced by a blunt indenter are approximately radial and the plastic strain contours are hemispherical or semicircular in shape. An increment of penetration of the indenter is accompanied by an increment in the radial displacement of the cavity of Δa. Following Johnson (1970), we impose volume conversion requiring that the volume of the material displaced by the indenter, \(\Delta V_{{{\text{IND}}}} = 2^{2 - k} \pi^{k - 1} a^{k} \tan \alpha \Delta a\), corresponds to the radial expansion of the hemispherical cavity, \(\Delta V_{{{\text{CEM}}}} = 2^{k - 1} \pi a^{k} \Delta a\). The velocity at the cavity wall, i.e., ξ = 1, reads
Combining Eqs. (37) and (39) gives a general expression for the evolution of the normalized damage zone size:
For a blunt-truncated indenter with a flat tip of width 2a0, the contact length becomes
Introducing the ratio of penetration depth \(d\) and the length of the truncated tip
the evolution of the damage zone size Eq. (40) becomes
with the initial condition given by
Equation (43) reduces to the solution of Alehossein et al. (2000) for m = 0, i.e., infinite specimen size. An analytical solution of Eq. (43) is hindered by the fact that \(f_{{\text{m}}}\) and \(C_{{\text{v}}}\) depend on \(m\) introduced in Eq. (12), which is a function of \(\xi_{R}\) and \(\delta\):
Therefore, Eq. (43) is solved numerically as an initial value problem using fourth Runge–Kutta method as in Yang and Russell (2015). Once \(\xi_{R}\) is known, the indentation pressure is determined by Eq. (21) as:
Appendix 2
2.1 Linear Elastic Fracture Mechanics
The growth of a single tensile fracture in the wake of indentation is treated within the framework of linear elastic fracture mechanics. The model is based on the milestone work of Lawn and Evans (1977) and is extended to incorporate specimen size effect and indenter geometry for frictional materials like rocks. The stress intensity factor for an axially symmetric penny-shaped crack of length 2c is given as (Tada et al. 2000)
where the position \(x\) corresponds to a coordinate axis aligned with the crack and with its origin at the center of the crack. We identify the tensile stress \(\sigma (x)\) with the hoop stress at the elastic–plastic boundary from the cavity-expansion analysis Eq. (22). To simplify the following analysis, the power function Eq. (22) is approximated by a linear function (see Fig. 15):

with the characteristic distance, over which the hoop stress decays in the elastic region:
where \(C_{{\text{b}}}\) is a dimensionless factor expected to be of order unity (Fig. 15). Equation (48) reflects the rule-of-thumb that a source perturbs stresses in a region with the source’s size and corresponds to the scaling argument made by Lawn and Evans (1977).
Precisely, Cb can be obtained by comparing the gradient of σθ at the elastic-plastic boundary, i.e., \( \sigma _{\theta } (x) = \sigma _{{\theta ,{\text{EP}}}} + \left. {{{d\sigma _{\theta } } \mathord{\left/ {\vphantom {{d\sigma _{\theta } } {dx}}} \right. \kern-\nulldelimiterspace} {dx}}} \right|_{{x = R}} x \) with Eq. (47), so that
Insertion of Eq. (47) into Eq. (46) and subsequent direct integration for \(b > c\) lead to
The stress intensity Eqs. (49) depends on cavity shape and specimen dimensions. Evaluation with the scaling relation Eq. (48) reveals that the stress intensity for a given crack size \(c\) is larger for a cylindrical cavity than for a spherical cavity (Fig. 16). Furthermore, cracks of a given size experience larger stress intensities in smaller specimens (larger \(R/B\)) corresponding to a smaller \(\xi_{{\text{R}}}\).

Estimation of the angle of internal friction, one of the two parameters of the Mohr–Coulomb failure criterion
The stress intensity Eq. (49) exhibits a maximum for a crack length
i.e., a flaw that extends over ~ 40% of the distance range, for which a significant tensile hoop stress occurs in the elastic region (Fig. 15). The existence of this maximum is of key importance for the failure evolution. When a pre-existing flaw with \(c_{{{\text{ini}}}} < c_{\max }\) reaches the critical stress intensity, i.e., \(K_{{\text{I}}} (c_{{{\text{ini}}}} ) = K_{{{\text{IC}}}}\), its growth is associated with increasing stress intensity and thus indentation pressure decreases until the initial flaw reaches a length \(c_{\max }\). As a consequence of the reduction in indentation pressure, the damage zone will exhibit limited growth during fracture growth and thus we can approximate \(\xi_{{\text{R}}} (c_{{{\text{ini}}}} ) \simeq \xi_{{\text{R}}} (c_{\max } )\). Then also the penetration depths hold \(d(c_{{{\text{ini}}}} ) \simeq d(c_{\max } )\), as supported by our experimental observation that the load decrease after the peak pressure occurs over a small range in penetration compared to the penetration associated with reaching the peak pressure, and thus, evaluating Eq. (46) for the maximum indentation pressure \(p_{{{\text{max}}}} = p(c_{{{\text{ini}}}} )\), we arrive at
where
is a parameter depending on indenter and specimen geometry.
Appendix 3
3.1 Failure Envelope of the Tested Rock
We use the results of triaxial compression tests, performed at confining pressures up to 150 MPa on specimens from a different block than the one used to prepare our specimens for the indentation tests, to estimate the parameters of the Mohr–Coulomb failure criterion. The failure envelope is slightly curved (Fig. 16). The internal friction angle used in this study is estimated based on the initial part of the curved failure envelope, covering mean stresses up to 200 MPa consistent with the stress state of the damage zone and is, therefore, larger than the angle obtained from the overall fitting.
Rights and permissions
About this article

Cite this article
Yang, H., Renner, J., Brackmann, L. et al. Normal Indentation of Rock Specimens with a Blunt Tool: Role of Specimen Size and Indenter Geometry. Rock Mech Rock Eng 55, 2027–2047 (2022). https://doi.org/10.1007/s00603-021-02732-4
Received:
Accepted:
Published:
Issue Date:
DOI: https://doi.org/10.1007/s00603-021-02732-4