
Abstract
Background
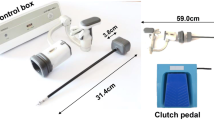
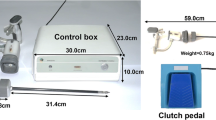
The Kymerax© Precision-Drive Articulating Surgical System by Terumo© is a handheld laparoscopic robot which permits motion in two additional degrees of freedom (deflection and rotation in the instrument tip). In a pelvitrainer model, we compared the performance of participants with different laparoscopic experiences and compared Kymerax© to conventional laparoscopic instruments.
Methods
20 expert surgeons, performing more than 50 laparoscopic procedures per year, and 25 medical students without any experience in surgery at all were selected. Each participant was randomized into two groups: Group TK performed the tasks using the traditional laparoscopic Instruments (TLI) first and Kymerax© thereafter, group KT vice versa. Six standardized tasks were used: Two instructional exercises and four tasks where time, number of mistakes, and overall precision were measured. Finally, a questionnaire had to be answered.
Results
All four tasks were performed significantly more slowly with the Kymerax© device. Improved needle control in stitches towards the surgeon, significantly less deviation while cutting along different lines as well as a significantly reduced fraying of the cutting edge were found when participants were using Kymerax©. By questionnaire more than 90% of the participants indicated clear advantages using Kymerax©. However, participants needed more training time and had an earlier loss of concentration with Kymerax©. Further complaints about Kymerax© were its limitations in rotation and deflection, the impaired view as well as the non-ergonomic instrument handle. Rotation force, instrument weight, digital instrument-tip control, and needle fixation were rated as accurate.
Conclusions
This study shows that more time is needed to solve tasks with Kymerax© compared to conventional laparoscopic instruments. Kymerax© is superior to conventional laparoscopy for suturing at difficult angles and cutting along complex structures. Kymerax© can potentially bring benefits for certain laparoscopic tasks, but as seen in this study, further developments are necessary. Terumo© meanwhile closed down its Kymerax© business.
















Similar content being viewed by others

References
Zullo F, Falbo A, Palomba S (2012) Safety of laparoscopy vs laparotomy in the surgical staging of endometrial cancer: a systematic review and metaanalysis of randomized controlled trials. Am J Obstet Gynecol 207:94–100
Yeung PP Jr, Bolden CR, Westreich D, Sobolewski C (2013) Patient preferences of cosmesis for abdominal incisions in gynecologic surgery. J Minim Invasive Gynecol 20:79–84
Park JY, Kim DY, Kim JH (2012) Laparoscopic versus open radical hysterectomy for elderly patients with early-stage cervical cancer. Am J Obstet Gynecol 207:195–198
Pérez-Duarte FJ, Sánchez-Margallo FM, Díaz-Güemes Martín-Portugés I (2011) Ergonomics in laparoscopic surgery and its importance in surgical training. Cir Esp 90:284–291
Zhang L, Zhou N, Wang S (2013) Direct manipulation of tool-like masters for controlling a master-slave surgical robotic system. Int J Med Robot 10:427–437
Jiang ZW, Li JS (2012) Current status and future perspectives of robotic surgery and laparoscopic surgery for gastric cancer. Chin J gastrointest surg 15:776–777
Sundi D, Reese AC, Mettee LZ (2013) Laparoscopic and robotic radical prostatectomy outcomes in obese and extremely obese men. Urology 82:600–605
Frede T, Hammady A, Klein J (2006) The Radius Surgical System—a new device for complex minimally invasive procedures in urology? Eur Urol 51:1015–1022
Waseda M, Inaki N, Torres Bermudez JR (2007) Precision in stitches: Radius Surgical System. Surg Endosc 21:2056–2062
Inaki N, Waseda M, Schurr MO (2006) Experimental results of mesh fixation by a manual manipulator in a laparoscopic inguinal hernia repair model. Surg Endosc 21:197–201
Di Lorenzo N, Camperchioli I, Gaspari AL (2007) Radius Surgical System and conventional laparoscopic instruments in abdominal surgery: application, learning curve and ergonomy. Surg Oncol 16:69–72
Torres Bermudez JR, Buess G, Waseda M (2009). Laparoscopic intacorporal colorectal sutured anastomosis using the Radius Surgical System in a phantom model. Surg Endosc 23(7):1624–1632
McDougall EM (2007) Validation of surgical simulators. J Endourol 21(3):244–247
14 Bianchi PP, Luca F, Petz W (2013). The role of the robotic technique in minimally invasive surgery in rectal cancer. Encancermedicalscience 26:357.ssss
Shane MD, Pettitt BJ, Morgenthal CH (2008) Should surgical novices trade their retractors for joysticks? Videogame experience decreases the time needed to acquire surgical skills. Surg Endosc 22(5):1294–1297
Acknowledgements
Many thanks to all the participants, to Mr. Helmut Vorkauf for assistance in statistical analysis, to Dominik Lacher and Robert Oehler, Dr.med. for technical support, and to Miriam Ryf and Adrian Sieber, Dr.med. for critically reviewing the text.
Author information
Authors and Affiliations
Corresponding author
Ethics declarations
Disclosure
In this article, there is no funding or any disclosure to companies, except from the fact, that the laparoscopy system and the traditional laparoscopic instruments were provided by Anklin© AG Switzerland and the Kymerax system by Terumo© for the duration of the study. Otherwise, the authors Sieber Marco Alain, Fellmann-Fischer Bernhard, Mueller Michael have no conflicts of interest or financial ties to disclose.
Additional information
Authors Fellmann and Sieber contributed equally to this work.
Rights and permissions
About this article

Cite this article
Sieber, M.A., Fellmann-Fischer, B. & Mueller, M. Performance of Kymerax© precision-drive articulating surgical system compared to conventional laparoscopic instruments in a pelvitrainer model. Surg Endosc 31, 4298–4308 (2017). https://doi.org/10.1007/s00464-017-5438-8
Received:
Accepted:
Published:
Issue Date:
DOI: https://doi.org/10.1007/s00464-017-5438-8