
Abstract
Background
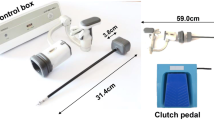
Handheld robotic laparoscopic instruments fill the gap between robotic and conventional instruments, combining the advantages of degrees of freedom and low price. The difficulty and value in learning these new instruments require detailed investigation.
Methods
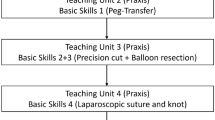
Forty novice surgeons with no laparoscopic experience were randomly assigned to two groups: conventional instrument group (Group Conv) and robotic instrument group (Group Rob). The same training protocol was used in both groups: after viewing a standard operation film, laparoscopic suture training was administered using the corresponding instruments. After each training period, surgeons were tested using a force-sensing test platform. Maximum force (MF) and impulse (IMP) of operators through each ring were recorded. Learning curves based on MF and IMP for both instruments were compared. Institutional review board approval is not needed for this study.
Results
MF and IMP of both groups decreased with increased training time; the learning curve of Group Conv decreased faster than that of Group Rob. When training time reached 13 h, the MF of Group Rob was significantly lower than that of Group Conv (P < 0.05), while IMP showed no significant difference between the two groups.
Conclusions
Effective training reduces operator MF and IMP, possibly decreasing damage to tissues with both conventional and handheld robotic needle holders. Group Rob took longer to reach a plateau, but subsequently had lower suture tension than did Group Conv. MF is more sensitive than IMP for measuring performance progress.






Similar content being viewed by others

Abbreviations
- IMP:
-
Impulse
- MF:
-
Maximum force
References
Bann S, Khan M, Hernandez J, Munz Y, Moorthy K, Datta V, Rockall T, Darzi A (2003) Robotics in surgery. J Am Coll Surg 196:784–795
Williams RD (2002) What's new in urology. J Am Coll Surg 195:663–674
Hockstein NG, Gourin CG, Faust RA, Terris DJ (2007) A history of robots: from science fiction to surgical robotics. J Robot Surg 1:113–118
Kalan S, Chauhan S, Coelho RF, Orvieto MA, Camacho IR, Palmer KJ, Patel VR (2010) History of robotic surgery. J Robot Surg 4:141–147
Casella DP, Fox JA, Schneck FX, Cannon GM, Ost MC (2013) Cost analysis of pediatric robot-assisted and laparoscopic pyeloplasty. J Urol 189:1083–1086
Morelli L, Di Franco G, Lorenzoni V, Guadagni S, Palmeri M, Furbetta N, Gianardi D, Bianchini M, Caprili G, Mosca F, Turchetti G, Cuschieri A (2019) Structured cost analysis of robotic TME resection for rectal cancer: a comparison between the da Vinci Si and Xi in a single surgeon's experience. Surg Endosc 33:1858–1869
Amodeo A, Linares QA, Joseph JV, Belgrano E, Patel HR (2009) Robotic laparoscopic surgery: cost and training. Minerva Urol Nefrol 61:121–128
Zapardiel I, Hernandez A, De Santiago J (2015) The efficacy of robotic driven handheld instruments for the acquisition of basic laparoscopic suturing skills. Eur J Obstet Gynecol Reprod Biol 186:106–109
Sanchez-Margallo JA, Sanchez-Margallo FM (2017) Initial experience using a robotic-driven laparoscopic needle holder with ergonomic handle: assessment of surgeons' task performance and ergonomics. Int J Comput Assist Radiol Surg 12:2069–2077
Bensignor T, Morel G, Reversat D, Fuks D, Gayet B (2016) Evaluation of the effect of a laparoscopic robotized needle holder on ergonomics and skills. Surg Endosc 30:446–454
Feng J, Yang K, Zhang Z, Li M, Chen X, Yan Z, Du Z, Wang X (2019) Handheld laparoscopic robotized instrument: progress or challenge? Surg Endosc. https://doi.org/10.1007/s00464-019-06820-z
Horeman T, Rodrigues SP, Jansen FW, Dankelman J, van den Dobbelsteen JJ (2010) Force measurement platform for training and assessment of laparoscopic skills. Surg Endosc 24:3102–3108
Simon J, Finter F, Ignatius A, Meilinger M, Durselen L (2011) Maximum tensile force of different suture techniques in reconstruction of the renal remnant after nephron-sparing surgery. Surg Endosc 25:503–507
Sieber MA, Fellmann-Fischer B, Mueller M (2017) Performance of Kymerax(c) precision-drive articulating surgical system compared to conventional laparoscopic instruments in a pelvitrainer model. Surg Endosc 31:4298–4308
Sipahi M, Arslan E (2018) A New Needle Holder Design to Facilitate Intracorporeal Knot Tying. Surg Innov 25:199–202
Chandra V, Nehra D, Parent R, Woo R, Reyes R, Hernandez-Boussard T, Dutta S (2010) A comparison of laparoscopic and robotic assisted suturing performance by experts and novices. Surgery 147:830–839
Hardon SF, Horeman T, Bonjer HJ, Meijerink W (2018) Force-based learning curve tracking in fundamental laparoscopic skills training. Surg Endosc 32:3609–3621
Jamshidi R, LaMasters T, Eisenberg D, Duh QY, Curet M (2009) Video self-assessment augments development of videoscopic suturing skill. J Am Coll Surg 209:622–625
Yang K, Perez M, Hubert N, Hossu G, Perrenot C, Hubert J (2017) Effectiveness of an integrated video recording and replaying system in robotic surgical training. Ann Surg 265:521–526
Pernar LIM, Robertson FC, Tavakkoli A, Sheu EG, Brooks DC, Smink DS (2017) An appraisal of the learning curve in robotic general surgery. Surg Endosc 31:4583–4596
Stefanidis D, Hope WW, Korndorffer JR, Markley S, Scott DJ (2010) Initial laparoscopic basic skills training shortens the learning curve of laparoscopic suturing and is cost-effective. J Am Coll Surg 210:436–440
Lee SY, Allen PJ, Sadot E, D’Angelica MI, DeMatteo RP, Fong Y, Jarnagin WR, Kingham TP (2015) Distal pancreatectomy: a single institution’s experience in open, laparoscopic, and robotic approaches. J Am Coll Surg 220:18–27
Acknowledgements
The authors would like to thank all of the volunteers in this study.
Funding
This work was supported by the youth talent project of the Health Commission of Hubei Province (Grant No. WJ2019Q050) and the Hubei provincial teaching reform research project (Grant No. 2018038).
Author information
Authors and Affiliations
Corresponding authors
Ethics declarations
Disclosure
Jing Feng, Zhiyuan Yan, Man Li, Zhang Zhang, XiaoJia Chen, Zhi Jiang Du and Kun Yang declare that they have no conflicts of interest or financial ties to disclose.
Additional information
Publisher's Note
Springer Nature remains neutral with regard to jurisdictional claims in published maps and institutional affiliations.
Electronic supplementary material
Below is the link to the electronic supplementary material.
Supplementary file1 (MP4 37815 kb)
Rights and permissions
About this article

Cite this article
Feng, J., Yan, Z., Li, M. et al. Handheld robotic needle holder training: slower but better. Surg Endosc 35, 1667–1674 (2021). https://doi.org/10.1007/s00464-020-07550-3
Received:
Accepted:
Published:
Issue Date:
DOI: https://doi.org/10.1007/s00464-020-07550-3