
Abstract
This paper deals with the Saint-Venant torsion of elastic, cylindrically orthotropic bar whose cross section is a sector of a circular ring shaped bar. The cylindrically orthotropic homogeneous elastic wedge-shaped bar strengthened by on its curved boundary surfaces by thin isotropic elastic shells. An analytical method is presented to obtain the Prandtl’s stress function, torsion function, torsional rigidity and shearing stresses. A numerical example illustrates the application of the developed analytical method.
Similar content being viewed by others

Avoid common mistakes on your manuscript.
1 Introduction
The Saint-Venant torsion of anisotropic linearly elastic bars has been the subject of several works from both theoretical and numerical viewpoints. Books by Lekhnitskii [5, 6], Milne-Thomson [8], Arutjujan and Abramjan [1], Sokolnikoff [13], Sadd [10], Sarkisyan [11, 12], Rand and Rovenski [9], Chabanjan [2] give the detailed analysis of Saint-Venant torsion of anisotropic and orthotropic bars. The books mentioned above deal with mainly the Saint-Venant torsion of Cartesian anisotropic and orthotropic bars. The torsion problem of cylindrically anisotropic and orthotropic bars is studied in books by Lekhnitskii [5, 6], Rand and Rovenski [9] and papers by Soós [14] and Ecsedi et al [4]. In paper [3], by the use of principle of minimum of potential energy and principle of minimum of complementary energy, approximate analytical solutions are derived for the torsion function and for the Prandtl’s stress function of the uniform torsion of cylindrically orthotropic solid elliptical cross section.
Present paper deals with the Saint-Venant torsion of cylindrically orthotropic bar whose cross section is a sector of hollow circle. The considered cylindrically orthotropic homogeneous elastic annular wedge-shaped bar strengthened on its curved boundary parts by thin isotropic elastic shells. An analytical solution is formulated to solve the Saint-Venant’s torsion problem for the cylindrically orthotropic bar which is reinforced by thin isotropic elastic shells on its curved boundary surfaces. The developed solution gives the Prandtl’s stress function, torsion function and the torsional rigidity of the compound cross section which consists of one solid cross section and two open thin walled cross section.
2 Governing equations
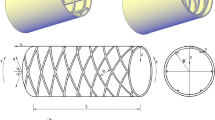
At first, we consider the Saint-Venant torsion of the compound linear elastic bar which is constructed from three cylindrical orthotropic beam components whose cross section is shown in Fig. 1.

Cylindrically orthotropic compound cross section
The cylindrical coordinate system \(Or\varphi z\) has been used to formulate the governing equations of the uniform torsion problem of compound annular wedge-shape bar. The cross section A can be divided into three parts as \(A=A_{1}\cup A_{2}\cup A_{3}\), where
There are perfect connections between the beam components whose cross sections are \(A_{1}\), \(A_{2}\) and \(A_{3}\). From this fact it follows that axial displacement and radial shearing stress field are continuous on the whole cross section A. The length of the compound bar is denoted by L. The material of the beam component \(B_{i}=A_{i}\times (0,L)\) \((i=1,2,3)\) is cylindrically orthotropic with shear modulus \(G_{ir}\), \(G_{i\varphi }\) \((i=1,2,3)\). In the present problem the Prandtl’s stress function formulation of the considered Saint-Venant torsion leads to the next coupled boundary-value problem [2, 4,5,6, 9, 11, 12]
Equations (4), (6) and (8) formulate the strain compatibility conditions in terms of stress function \(U_{i}=U_{i}(r,\varphi )\) \((i=1,2,3)\). The boundary conditions (5), (7), (9), (10) and (11) express that the whole boundary contour of cross section A is traction free. The continuity conditions of radial shearing stresses on the common boundary curve of \(A_{1}\) and \(A_{2}\) on the common boundary curve of \(A_{2}\) and \(A_{3}\) are formulated by Eqs. (12) and (13). Equations (14) and (15) provide the continuity of the axial displacement over the whole cross section A. The relation between the Prandtl’s stress functions \(U_{i}=U_{i}(r,\varphi )\) and torsion function \(\omega _{i}=\omega _{i}(r,\varphi )\) are described by the following systems of equations [2, 5, 6, 9, 11, 12]
Equation (16) is based on formulae of shearing stresses \(\tau _{irz}=\tau _{irz}(r,\varphi )\) and \(\tau _{i\varphi z}=\tau _{i\varphi z}(r,\varphi )\) expressed in terms of \(U_{i}=U_{i}(r,\varphi )\) and \(\omega _{i}=\omega _{i}(r,\varphi )\) \((i=1,2,3)\) which are as follows
In Eqs. (14), (15) \(\vartheta \) denotes the rate of twist with respect to the axial coordinate z [5, 6, 8]. The relation between the applied torque T and \(\vartheta \) is as follows
where S is the torsional rigidity of the compound cross section A. According to Prandtl’s formulation of uniform torsion we have [5, 6, 11, 12]
Here, we note for isotropic beam component the shear modulus in radial and circumferential direction is the same, that is
3 Cross section reinforced by thin elastic shells
Figure 2 shows the elastic cylindrically orthotropic cross section which is reinforced by thin isotropic elastic shells on its curved boundary. In the present problem
The thickness \(t_{i}\) \((i=1,2)\) are small in comparison with \(R_{0}\). Following Arutyunjan and Abramyan [1] and Chabanjan [2] we assume that the stress function \(U_{i}=U_{i}(r,\varphi )\) \((i=1,3)\) is a linear function of the radial coordinate r and satisfies the boundary conditions (10), (11), and the continuity conditions formulated by Eqs. (12) and (13). According to the above-mentioned requirements we have
Here, we introduce the next designation \(U_{2}(r,\varphi )=U(r,\varphi )\). Denote \(G_{i}\) \((i=1,3)\) the shear modulus of the thin isotropic elastic shell whose thickness is \(t_{i}\) \((i=1,2)\). The shear modulus in radial and tangential direction of cylindrically orthotropic cross section \(A_{2}\) are represented by \(G_{r}\) and \(G_{\varphi }\). From Eqs. (14) and (15) we obtain the next boundary conditions for \(U=U(r,\varphi )\) [1, 2]
Here

Orthotropic cross section reinforced by thin shells
The solution of Saint-Venant’s torsion of cylindrically orthotropic annular wedge-shaped bar strengthened by on its curved boundary surfaces by thin isotropic elastic shells is obtained from the next boundary value problem
We look for the solution of the boundary value problem formulated by Eqs. (29)–(32) in the next form
It is evident \(U=U(r,\varphi )\) satisfies the boundary conditions (30). In order to obtain the expression of \(u_{k}=u_{k}(r)\) we will use the next Fourier’s series representation of \(-2G_{\varphi }\)
Substitution of Eq. (33) into Eq. (29) we obtain
The general solution of the ordinary differential equation (35) is as follows
The constants \(a_{k}\) and \(b_{k}\) can be computed from the boundary conditions (31) and (32). A detailed computation gives
The determination of the torsional function of the cylindrically orthotropic cross section \(A_{2}\) is based on the coupled system of partial differential equations (17) and (18). In this section we use the next designation \(\omega _{2}=\omega \). According to Eqs. (17) and (18) we have
The solution of system of partial differential equation for \(\omega =\omega (r,\varphi )\) is as follows
This solution is vanishes on the axis of symmetry of the cross section \(A_{2}\) \((\varphi =\alpha /2)\). Since the size of thickness of shell-like cross-sectional component is very small we assume that \(\omega _{i}=\omega _{i}(r,\varphi )\) \((i=1,3)\) can be represented as
The torsional rigidity of the compound cross section is obtained by the application of Eq. (20). A simple computation gives the next results for S
where
The analytical solution of isotropic homogeneous elastic wedge-shaped bar which was given by Madhavi A and Madhavi Y [7] is recovered from the solution of Saint-Venant torsion problem presented in Sect. 3 of this paper if
4 Numerical example
The following data are used in the numerical example which illustrates the application of formulae of Sect. 3
The plots of the Prandtl’s stress function as a function of radial coordinate for five different values of polar angle are shown in Fig. 3.

Prandtl’s stress function as a function of radial coordinate
The plots of the shearing stress \(\tau _{\varphi z}\) for five different values of polar angle against radial coordinate are presented in Fig. 4.

Shearing stress \(\tau _{\varphi z}\) for five different values of polar angle
The illustration of the shearing stresses \(\tau _{rz}\) as a function of radial coordinate for five different values of polar angle are given in Fig. 5.

Shearing stress \(\tau _{rz}\) for five different values of polar angle
The contour lines of the Prandtl’s stress function are shown in Fig. 6.

Contour lines of Prandtl’s stress function
The plots of the torsional function for five different values of polar angle against radial coordinate r are presented in Fig. 7.

Torsional function for five different values of polar angle

Contour lines of the torsion function
The contour lines of the torsion function are shown in Fig. 8. The torsional rigidity of the beam components \(B_{1}\), \(B_{2}\), \(B_{3}\) and the whole compound cross section are as follows
5 Comparison of approximate solution with exact analytical solution
Table 1 shows the effect of the thickness of outer and inner shell-layers to the accuracy of the solution given by this paper. The accuracy of the solution is measured by the torsional rigidities \(S_{1}\), \(S_{2}\) and \(S_{3}\) of the cross-sectional components and a one value of Prandtl’s stress function
The first column of Table 1 are derived from the solution of boundary value problem formulated by Eqs. (29–32). The second column of Table 1 contains the results of exact analytical solutions of torsional problem which satisfy Eqs. (4–15).
The following data are used for calculation of the results for Table 1
6 Conclusion
In the present paper, the Saint-Venant torsion of the compound cylindrically orthotropic wedge-shaped bar has been studied. An analytical solution is given for the uniform torsion of the cylindrical orthotropic annular wedge shaped bar whose curved boundary segments are strengthened by thin isotropic elastic shells. The presented solution is valid for the vertex angle of compound cross section between 0 and \(2 \pi \). Closed form formulae are derived for the Prandtl’s stress function, torsion function, shearing stresses and torsional rigidity. Example illustrates the applications of the presented formulae.
References
Arutyunyan, N.H., Abramyan, B.L.: Torsion of Elastic Bodies. In Russian) Fizmatgiz, Moscow (1962)
Chobanjan, K.S.: Stresses in Compound Elastic Bodies. (In Russian) Izd. An. Apm. janslkoj SSSR, Erevan (1987)
Ecsedi, I., Baksa, A.: Saint-Venant torsion of cylindrical orthotropic elliptical cross section. Mech. Res. Commun. 99, 42–46 (2019). https://doi.org/10.1016/j.mechrescom.2019.06.006
Ecsedi, I., Lengyel, A.J., Baksa, A.: Torsion of cylindrical orthotropic composite bar with cross section of a sector of solid circle. MultiScience XXXIII. In microCAD Int. Multidiscip. Conf. D(2–5), 1–9 (2019). https://doi.org/10.26649/musci.2019.038
Leknitskii, S.G.: Torsion of Anisotropic and Non-homogenous Beams. (in Russian) Izd. Nauka, Fiz-Mat. Literaturi, Moscow (1971)
Leknitskii, S.G.: Theory of Elasticity of an Anisotropic Body. MIR Publisher, Moscow (1981). https://doi.org/10.1107/S0365110X64002171
Madhavi, A., Madhavi, Y.: A novel analytical solution for warping analysis of annular wedge-shaped bars. Arch. Appl. Mech. 150, 258 (2021). https://doi.org/10.1007/s00419-020-01858-1
Milne-Thomson, M.L.: Antiplane Elastic Systems. Springer, Berlin (1962). https://doi.org/10.1007/978-3-642-85627-3
Rand, O., Rovenski, W.: Analytical Methods in Anisotropic Elasticity. Birkhäser (2005). https://doi.org/10.1007/b138765
Sadd, H.M.: Elasticity. Theory, Application and Numerics. Elsevier, London (2005). https://doi.org/10.1016/B978-0-12-374446-3.X0001-6
Sarkisyan, V.S.: Some Problems of Anisotropic Elastic Bodies. Izd. Erevan University Press, Erevan (1970). In Russian
Sarkisyan, V.S.: Some Problems of Mathematical Theory of Elasticity of an Anisotropic Body. Izd. Erevan University Press, Erevan (1976). (In Russian)
Sokolnikoff, I.S.: Mathematical Theory of Elasticity. McGraw-Hill, Chennai (1956). https://doi.org/10.2307/3608899
Soós, E.: Sur le probléme de Saint-Venant dans le cas des barres hétérogénes avae anisotropic cylindrique. Bull. Math. de la Soc.Sci.Math.Phys. de la RPP 7(55), 61–75 (1963)
Funding
Open access funding provided by University of Miskolc.
Author information
Authors and Affiliations
Corresponding author
Ethics declarations
Conflict of interest
On behalf of all authors, the corresponding author states that there is no conflict of interest.
Additional information
Publisher's Note
Springer Nature remains neutral with regard to jurisdictional claims in published maps and institutional affiliations.
Rights and permissions
Open Access This article is licensed under a Creative Commons Attribution 4.0 International License, which permits use, sharing, adaptation, distribution and reproduction in any medium or format, as long as you give appropriate credit to the original author(s) and the source, provide a link to the Creative Commons licence, and indicate if changes were made. The images or other third party material in this article are included in the article’s Creative Commons licence, unless indicated otherwise in a credit line to the material. If material is not included in the article’s Creative Commons licence and your intended use is not permitted by statutory regulation or exceeds the permitted use, you will need to obtain permission directly from the copyright holder. To view a copy of this licence, visit http://creativecommons.org/licenses/by/4.0/.
About this article

Cite this article
Ecsedi, I., Baksa, A. Analytical solution for torsion of cylindrical orthotropic annular wedge-shaped bars reinforced by thin shells. Arch Appl Mech 91, 4303–4311 (2021). https://doi.org/10.1007/s00419-021-02009-w
Received:
Accepted:
Published:
Issue Date:
DOI: https://doi.org/10.1007/s00419-021-02009-w