
Abstract
Aim
To compare robotic-assisted needle insertions performed under CBCT guidance to standard manual needle insertions.
Materials and Methods
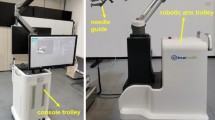
A homemade robotic prototype was used by two operators to perform robotic and manual needle insertions on a custom-made phantom. Both the operators had no experience with the prototype before starting the trial. The primary endpoint was accuracy (i.e., the minimal distance between the needle tip and the center of the target) between robotic and manual insertions. Secondary endpoints included total procedure time and operators’ radiation exposure. The Wilcoxon test was used. A p value less than 0.05 was considered statistically significant.
Results
Thirty-three (17 manual, 16 robotic) needle insertions were performed. Mean accuracy for robotic insertion was 2.3 ± 0.9 mm (median 2.1; range 0.8–4.2) versus 2.3 ± 1 mm (median 2.1; range 0.7–4.4) for manual insertion (p = 0.84). Mean procedure time was 683 ± 57 s (median 670; range 611–849) for the robotic group versus 552 ± 40 s (median 548; range 486–621) for the manual group (p = 0.0002). Mean radiation exposure was 3.25 times less for the robotic insertion on comparison to manual insertion for the operator 1 (0.4 vs 1.3 µGy); and 4.15 times less for the operator 2 (1.9 vs 7.9 µGy).
Conclusion
The tested robotic prototype showed accuracy comparable to that achieved with manual punctures coupled to a significant reduction of operators’ radiation exposure. Further, in vivo studies are necessary to confirm the efficiency of the system.



Similar content being viewed by others


References
Tsai EB, Pomykala K, Ruchalski K, et al. Feasibility and safety of intrathoracic biopsy and repeat biopsy for evaluation of programmed cell death ligand-1 expression for immunotherapy in non-small cell lung cancer. Radiology. 2018;287(1):326–32.
Veltri A, Bargellini I, Giorgi L, et al. CIRSE guidelines on percutaneous needle biopsy (PNB). Cardiovasc Intervent Radiol. 2017;40(10):1501–13.
Cazzato RL, Garnon J, Shaygi B, et al. PET/CT-guided interventions: indications, advantages, disadvantages and the state of the art. Minim Invasive Ther Allied Technol. 2018;27(1):27–32.
Garnon J, Koch G, Tsoumakidou G, et al. Ultrasound-guided biopsies of bone lesions without cortical disruption using fusion imaging and needle tracking: proof of concept. Cardiovasc Intervent Radiol. 2017;40(8):1267–73.
Lee SM, Park CM, Lee KH, et al. C-arm cone-beam CT-guided percutaneous transthoracic needle biopsy of lung nodules: clinical experience in 1108 patients. Radiology. 2014;271(1):291–300.
Braak SJ, van Melick HHE, Onaca MG, et al. 3D cone-beam CT guidance, a novel technique in renal biopsy—results in 41 patients with suspected renal masses. Eur Radiol. 2012;22(11):2547–52.
Cazzato RL, Battistuzzi J-B, Catena V, et al. Cone-beam computed tomography (CBCT) versus CT in lung ablation procedure: which is Faster? Cardiovasc Intervent Radiol. 2015;38(5):1231–6.
Schulz B, Eichler K, Siebenhandl P, et al. Accuracy and speed of robotic assisted needle interventions using a modern cone beam computed tomography intervention suite: a phantom study. Eur Radiol. 2013;23(1):198–204.
Hiraki T, Kamegawa T, Matsuno T, et al. Robotically driven CT-guided needle insertion: preliminary results in phantom and animal experiments. Radiology. 2017;285(2):454–61.
Lefebvre PM, Koon KTV, Brusseau E, et al. Comparison of viscoelastic property characterization of plastisol phantoms with magnetic resonance elastography and high-frequency rheometry. In: 38th Annual International Conference of the IEEE Engineering in Medicine and Biology Society (EMBC). 2016. pp. 1216–9.
Kettenbach J, Kronreif G. Robotic systems for percutaneous needle-guided interventions. Minim Invasive Ther Allied Technol. 2015;24(1):45–53.
Kettenbach J, Kara L, Toporek G, et al. A robotic needle-positioning and guidance system for CT-guided puncture: ex vivo results. Minim Invasive Ther Allied Technol. 2014;23(5):271–8.
Groetz S, Wilhelm K, Willinek W, et al. A new robotic assistance system for percutaneous CT-guided punctures: initial experience. Minim Invasive Ther Allied Technol. 2016;25(2):79–85.
Ben-David E, Shochat M, Roth I, et al. Evaluation of a CT-guided robotic system for precise percutaneous needle insertion. J Vasc Interv Radiol. 2018. https://doi.org/10.1016/j.jvir.2018.01.002.
Solomon SB, Patriciu A, Bohlman ME, et al. Robotically driven interventions: a method of using CT fluoroscopy without radiation exposure to the physician. Radiology. 2002;225(1):277–82.
Acknowledgements
Authors would like to sincerely thank Marie Charlotte Hesler (MD) and Emile Reeb for their participation in the experiments; Luc Mertz (Ph.D.), Nicolas Clauss and Elise Bottlaender from the Radiophysics and Radioprotection Department of the University of Strasbourg for their kind assistance in lending and reading the TLD dosimeters.
Funding
This work was supported by the INTERREG Upper Rhine program from the ERDF (European Regional Development Fund), SPIRITS project.
Author information
Authors and Affiliations
Corresponding author
Ethics declarations
Conflict of interest
The authors declare that they have no conflict of interest.
Human and Animal Rights
This article does not contain any studies with animals performed by any of the authors.
Rights and permissions
About this article

Cite this article
Pfeil, A., Cazzato, R.L., Barbé, L. et al. Robotically Assisted CBCT-Guided Needle Insertions: Preliminary Results in a Phantom Model. Cardiovasc Intervent Radiol 42, 283–288 (2019). https://doi.org/10.1007/s00270-018-2088-8
Received:
Accepted:
Published:
Issue Date:
DOI: https://doi.org/10.1007/s00270-018-2088-8