
Abstract
This paper studies the uniform and weak Lopatinskiĭ conditions associated with classical (Lax) shock fronts of arbitrary amplitude for compressible hyperelastic materials of Hadamard type in several space dimensions. Thanks to the seminal works of Majda (Mem Amer Math Soc 43(281):v+93, 1983, 41(275):iv+95, 1983) and Métivier (Trans Am Math Soc 296:431–479, 1986, Commun Partial Differ Eqs 15(7):983–1028, 1990, Stability of multidimensional shocks, in: Freistühler H, Szepessy A (eds) Advances in the theory of shock waves, vol 47 of progress in nonlinear differential equations and their applications. Birkhäuser, Boston, pp 25–103, 2001), the uniform Lopatinskiĭ condition ensures the local-in-time, multidimensional, nonlinear stability of such fronts. The stability function (also called Lopatinskiĭ determinant) for shocks of arbitrary amplitude in this large class of hyperelastic materials is computed explicitly. This information is used to establish the conditions for uniform and weak shock stability in terms of the parameters of the shock and of the elastic moduli of the material.



Similar content being viewed by others


Notes
as Benzoni-Gavage and Serre point out, “...all methods require some care and are a little lengthy"; [10], p. 431.
notice that under (\(\hbox {H}_3\)) necessarily \(\alpha < 0\), in view of Proposition 3.8; the result holds, however, independently of the sign of \(\alpha \).
With the exception, of course, of auxetic materials for which the Poisson ratio can be negative.
The first Lamé constant is usually denoted in the literature with the Greek letter \(\lambda \); however, in order to avoid confusion with the frequency \(\lambda \in {{\mathbb {C}}}\) in the shock stability analysis, we use a different symbol for it.
References
Akritas, A.G., Akritas, E.K., Malaschonok, G.I.: Various proofs of Sylvester’s (determinant) identity. Math. Comput. Simulation 42(4–6), 585–593, 1996
Aron, M., Aizicovici, S.: On a class of deformations of compressible, isotropic, nonlinearly elastic solids. J. Elast. 49(2), 175–185, 1997/98
Aubert, G.: Necessary and sufficient conditions for isotropic rank-one convex functions in dimension \(2\). J. Elast. 39(1), 31–46, 1995
Ball, J.M.: Convexity conditions and existence theorems in nonlinear elasticity. Arch. Ration. Mech. Anal. 63(4), 337–403, 1976/77
Ball, J.M., James, R.D.: Fine phase mixtures as minimizers of energy. Arch. Ration. Mech. Anal. 100(1), 13–52, 1987
Ball, J.M., James, R.D.: Proposed experimental tests of a theory of fine microstructure and the two-well problem. Phil. Trans. R. Soc. Lond. A 338(1650), 389–450, 1992
Benzoni-Gavage, S.: Stability of multi-dimensional phase transitions in a van der Waals fluid. Nonlinear Anal. TMA 31(1–2), 243–263, 1998
Ball, J.M., James, R.D.: Stability of subsonic planar phase boundaries in a van der Waals fluid. Arch. Ration. Mech. Anal. 150(1), 23–55, 1999
Benzoni-Gavage, S., Freistühler, H.: Effects of surface tension on the stability of dynamical liquid-vapor interfaces. Arch. Ration. Mech. Anal. 174(1), 111–150, 2004
Benzoni-Gavage, S., Serre, D.: Multidimensional hyperbolic partial differential equations: First-order systems and applications. Oxford Mathematical Monographs, The Clarendon Press - Oxford University Press, Oxford, 2007
Bethe, H. A.: On the theory of shock waves for an arbitrary equation of state [Rep. No. 545, Serial No. NDRC-B-237, Office Sci. Res. Develop., U. S. Army Ballistic Research Laboratory, Aberdeen Proving Ground, MD, 1942]. In Classic papers in shock compression science, High-press. Shock Compression Condens. Matter, Springer, New York, pp. 421–492, 1998
Bischoff, J.E., Arruda, E.M., Grosh, K.: A new constitutive model for the compressibility of elastomers at finite deformations. Rubber Chem. Technol. 74(4), 541–559, 2001
Blatz, P.J.: On the thermostatic behavior of elastomers. In: Chompff, A., Newman, S. (eds.) Polymer Networks, pp. 23–45. Springer Science and Business Media, New York, NY (1971)
Blokhin, A.M.: Uniqueness of the classical solution of a mixed problem for equations of gas dynamics with boundary conditions on a shock wave. Sibirsk. Mat. Zh. 23(5), 17–30, 222, 1982
Carroll, M.M., Murphy, J.G., Rooney, F.J.: Plane stress problems for compressible materials. Int. J. Solids Struct. 31(11), 1597–1607, 1994
Chugainova, A.P., Il’ichev, A.T., Shargatov, V.A.: Stability of shock wave structures in nonlinear elastic media. Math. Mech. Solids 24(11), 3456–3471, 2019
Ciarlet, P.G.: Mathematical elasticity. Vol. I: Three-dimensional elasticity, vol. 20 of Studies in Mathematics and its Applications, North-Holland Publishing Co., Amsterdam, 1988.
Ciarlet, P.G., Geymonat, G.: Sur les lois de comportement en élasticité non linéaire compressible. C. R. Acad. Sci. Paris Sér. II Méc. Phys. Chim. Sci. Univers Sci. Terre 295(4), 423–426, 1982
Coleman, B.D., Noll, W.: On certain steady flows of general fluids. Arch. Ration. Mech. Anal. 3(1), 289–303, 1959
Corli, A.: Weak shock waves for second-order multi-dimensional systems. Boll. Un. Mat. Ital. B (7) 7(3), 493–510, 1993
Costanzino, N., Jenssen, H.K., Lyng, G., Williams, M.: Existence and stability of curved multidimensional detonation fronts. Indiana Univ. Math. J. 56(3), 1405–1461, 2007
Coulombel, J.-F., Secchi, P.: The stability of compressible vortex sheets in two space dimensions. Indiana Univ. Math. J. 53(4), 941–1012, 2004
Coulombel, J.-F., Secchi, P.: Nonlinear compressible vortex sheets in two space dimensions. Ann. Sci. Éc. Norm. Supér. (4) 41(1), 85–139, 2008
Currie, P.K.: The attainable region of strain-invariant space for elastic materials. Int. J. Non-Linear Mech. 39(5), 833–842, 2004
Dacorogna, B.: Necessary and sufficient conditions for strong ellipticity of isotropic functions in any dimension. Discrete Contin. Dyn. Syst. Ser. B 1(2), 257–263, 2001
Dafermos, C.M.: Quasilinear hyperbolic systems with involutions. Arch. Ration. Mech. Anal. 94(4), 373–389, 1986
Dafermos, C.M.: Hyperbolic conservation laws in continuum physics, vol. 325 of Grundlehren der Mathematischen Wissenschaften, Springer-Verlag, Berlin, fourth ed., 2016
Davies, P.J.: A simple derivation of necessary and sufficient conditions for the strong ellipticity of isotropic hyperelastic materials in plane strain. J. Elast. 26(3), 291–296, 1991
D’ yakov, S.P.: On the stability of shock waves. Ž. Eksper. Teoret. Fiz. 27, 288–295, 1954
De Tommasi, D., Puglisi, G., Zurlo, G.: A note on strong ellipticity in two-dimensional isotropic elasticity. J. Elast. 109(1), 67–74, 2012
Eremeyev, V.A., Cloud, M.J., Lebedev, L.P.: Applications of Tensor Analysis in Continuum Mechanics. World Scientific Publishing Co. Pte. Ltd., Hackensack, NJ (2018)
Erpenbeck, J.J.: Stability of step shocks. Phys. Fluids 5, 1181–1187, 1962
Fosdick, R., Royer-Carfagni, G.: Multiple natural states for an elastic isotropic material with polyconvex stored energy. J. Elast. 60(2000)(3), 223–231, 2001
Freistühler, H.: Some results on the stability of non-classical shock waves. J. Partial Differ. Eqs. 11(1), 25–38, 1998
Freistühler, H., Plaza, R.G.: Normal modes and nonlinear stability behaviour of dynamic phase boundaries in elastic materials. Arch. Ration. Mech. Anal. 186(1), 1–24, 2007
Freistühler, H., Plaza, R.G.: Normal modes analysis of subsonic phase boundaries in elastic materials. In Hyperbolic problems: Theory, Numerics, Applications, Benzoni-Gavage, S., Serre, D. (Eds.), Proceedings of the 11th International Conference on Hyperbolic Problems (HYP2006) held at the École Normale Supérieure, Lyon, July 17–21, 2006, Springer, Berlin, pp. 841–848, 2008
Freistühler, H., Szmolyan, P.: The Lopatinski determinant of small shocks may vanish. Preprint, 2011. arXiv:1102.4279.
Gardner, C.S.: Comment on “Stability of step shocks.” Phys. Fluids 6(9), 1366–1367, 1963
Gavrilyuk, S., Ndanou, S., Hank, S.: An example of a one-parameter family of rank-one convex stored energies for isotropic compressible solids. J. Elast. 124(1), 133–141, 2016
Giaquinta, M., Hildebrandt, S.: Calculus of variations I. The Lagrangian formalism. vol. 310 of Grundlehren der Mathematischen Wissenschaften, Springer-Verlag, Berlin, 1996
Gorb, Y., Walton, J.R.: Dependence of the frequency spectrum of small amplitude vibrations superimposed on finite deformations of a nonlinear, cylindrical elastic body on residual stress. Int. J. Eng. Sci. 48(11), 1289–1312, 2010
Grabovsky, Y., Truskinovsky, L.: Legendre-Hadamard conditions for two-phase configurations. J. Elast. 123(2), 225–243, 2016
Grabovsky, Y., Truskinovsky, L.: Explicit relaxation of a two-well Hadamard energy. J. Elast. 135(1–2), 351–373, 2019
Gradshteyn, I.S., Ryzhik, I.M.: Table of Integrals, Series, and Products. Elsevier/Academic Press, Amsterdam, seventh ed. 2007. Translated from the Russian. Translation edited and with a preface by A. Jeffrey and D. Zwillinger.
Hadamard, J.: Sur les problèmes aux dérivées partielles et leur signification physique. Princeton Univ. Bull. 13, 49–52, 1902
Hadamard, J.: Leçons sur la propagation des ondes et les équations de l’hydrodynamique. Librairie Scientifique A. Hermann, Paris, 1903
Hartmann, S.: The class of Simo & Pister-type hyperelasticity relations. Technical Report Fac3-10-02, Technical Report Series, Clausthal University of Technology, 2010
Hayes, M.: A remark on Hadamard materials. Quart. J. Mech. Appl. Math. 21(2), 141–146, 1968
Hersh, R.: Mixed problems in several variables. J. Math. Mech. 12(3), 317–334, 1963
Hill, R.: On constitutive inequalities for simple materials - I. J. Mech. Phys. Solids 16(4), 229–242, 1968
Hill, R.: On constitutive inequalities for simple materials - II. J. Mech. Phys. Solids 16(5), 315–322, 1968
Holzapfel, G.A.: Nonlinear Solid Mechanics. Wiley, Chichester (2000)
Horgan, C.O.: Remarks on ellipticity for the generalized Blatz-Ko constitutive model for a compressible nonlinearly elastic solid. J. Elast. 42(2), 165–176, 1996
Horgan, C.O., Saccomandi, G.: Constitutive models for compressible nonlinearly elastic materials with limiting chain extensibility. J. Elast. 77(2), 123–138, 2004
Jenssen, H.K., Lyng, G.: Evaluation of the Lopatinski determinant for multi-dimensional Euler equations. Appendix to K. Zumbrun, “Stability of large-amplitude shock waves of compressible Navier-Stokes equations” in The Handbook of Fluid Mechanics, Vol. III, S. Friedlander and D. Serre, eds. North-Holland, Amsterdam, 2004.
Jiang, Q., Knowles, J.K.: A class of compressible elastic materials capable of sustaining finite anti-plane shear. J. Elast. 25(3), 193–201, 1991
John, F.: Plane elastic waves of finite amplitude. Hadamard materials and harmonic materials. Comm. Pure Appl. Math. 19, 309–341, 1966
John, F.: Finite amplitude waves in a homogeneous isotropic elastic solid. Commun. Pure Appl. Math. 30(4), 421–446, 1977
Kirkinis, E., Ogden, R.W., Haughton, D.M.: Some solutions for a compressible isotropic elastic material. Z. Angew. Math. Phys. 55(1), 136–158, 2004
Knowles, J.K.: A note on anti-plane shear for compressible materials in finite elastostatics. J. Austral. Math. Soc. Ser. B 20(1), 1–7, 1977
Knowles, J.K., Sternberg, E.: On the failure of ellipticity of the equations for finite elastostatic plane strain. Arch. Ration. Mech. Anal. 63(1976)(4), 321–336, 1977
Kreiss, H.-O.: Initial boundary value problems for hyperbolic systems. Commun. Pure Appl. Math. 23, 277–298, 1970
Kubo, R.: Large elastic deformation of rubber. J. Phys. Soc. Japan 3, 312–317, 1948
Kulikovskiĭ, A.G., Chugaĭnova, A.P.: On the stability of quasi-transverse shock waves in anisotropic elastic media. Prikl. Mat. Mekh. 64(6), 1020–1026, 2000
Lax, P.D.: Hyperbolic systems of conservation laws II. Commun. Pure Appl. Math. 10, 537–566, 1957
Le Tallec, P.: Numerical methods for nonlinear three-dimensional elasticity. In: Handbook of Numerical Analysis, Numerical Methods for Solids (Part 1). Ciarlet, P.G., Lions, J.L. (Eds.), vol. 3 of Handbook of Numerical Analysis, Elsevier Science B.V., Amsterdam, pp. 465–622, 1994
Levinson, M., Burgess, I.W.: A comparison of some simple constitutive relations for slightly compressible rubber-like materials. Int. J. Mech. Sci. 13(6), 563–572, 1971
Lopatinskiĭ, J.B.: The mixed Cauchy-Dirichlet type problem for equations of hyperbolic type. Dopovīdī Akad. Nauk Ukraïn. RSR Ser. A 1970, 592–594, 668, 1970
Mac Donald, B.J.: Practical Stress Analysis with Finite Elements, 2nd edn. Glasnevin Publishing, Dublin (2011)
Majda, A.: The existence of multi-dimensional shock fronts. Mem. Amer. Math. Soc. 43(281), v + 93, 1983
Majda, A.: The stability of multi-dimensional shock fronts. Mem. Amer. Math. Soc. 41(275), iv + 95, 1983
Majda, A.: Compressible fluid flow and systems of conservation laws in several space variables, vol. 53 of Applied Mathematical Sciences, Springer-Verlag, New York, 1984
Meille, S., Garboczi, E.J.: Linear elastic properties of 2D and 3D models of porous materials made from elongated objects. Modelling Simul. Mater. Sci. Eng. 9(5), 371–390, 2001
Métivier, G.: Interaction de deux choc pour un systéme de deux lois de conservation, en dimension deux d’espace. Trans. Amer. Math. Soc. 296, 431–479, 1986
Métivier, G.: Stability of multidimensional weak shocks. Commun. Partial Differ. Eqs. 15(7), 983–1028, 1990
Métivier, G.: Stability of multidimensional shocks. In: Advances in the Theory of Shock Waves, Freistühler, H., Szepessy, A. (Eds.), vol. 47 of Progress in Nonlinear Differential Equations and Their Applications, Birkhäuser, Boston, pp. 25–103, 2001
Mills, N.: Polymer Foams Handbook, Engineering and Biomechanics Applications and Design Guide, Butterworth-Heinemann, Amsterdam, 2007
Nemat-Nasser, S., Shatoff, H.D.: A consistent numerical method for the solution of nonlinear elasticity problems at finite strains. SIAM J. Appl. Math. 20, 462–481, 1971
Ogden, R.W.: Large deformation isotropic elasticity: on the correlation of theory and experiment for compressible rubberlike solids. Proc. R. Soc. Lond. A Math. Phys. Sci. 328(1575), 567–583, 1972
Ogden, R.W.: Non-linear elastic deformations. Ellis Horwood, Chichester and John Wiley (1984)
Pence, T.J., Gou, K.: On compressible versions of the incompressible neo-Hookean material. Math. Mech. Solids 20(2), 157–182, 2015
Plaza, R.G.: Multidimensional stability of martensite twins under regular kinetics. J. Mech. Phys. Solids 56(4), 1989–2018, 2008
Prasolov, V.V.: Problems and theorems in linear algebra, vol. 134 of Translations of Mathematical Monographs, American Mathematical Society, Providence, RI, 1994. Translated from the Russian manuscript by D. A. Leĭtes.
Rivlin, R.S.: Large elastic deformations of isotropic materials. I. Fundamental concepts. Philos. Trans. Roy. Soc. London. Ser. A. 240, 459–490, 1948
Rivlin, R.S., Ericksen, J.L.: Stress-deformation relations for isotropic materials. J. Ration. Mech. Anal. 4(2), 323–425, 1955
Roberts, A.E.: Stability of a steady plane shock. Los Alamos Scientific Laboratory, Report No. LA-299, 1945
Serre, D.: Systems of Conservation Laws 1. Hyperbolicity, entropies, shock waves. Cambridge University Press, Cambridge 1999. Translated from the 1996 French original by I. N. Sneddon.
Serre, D.: Systems of Conservation Laws 2. Geometric structures, oscillations and initial-boundary value problems. Cambridge University Press, Cambridge 2000. Translated from the 1996 French original by I. N. Sneddon.
Serre, D.: La transition vers l’instabilité pour les ondes de choc multi-dimensionnelles. Trans. Amer. Math. Soc. 353(12), 5071–5093, 2001
Sfyris, D.: The strong ellipticity condition under changes in the current and reference configuration. J. Elast. 103(2), 281–287, 2011
Šilhavý, M.: The mechanics and thermodynamics of continuous media, Texts and Monographs in Physics, Springer-Verlag, Berlin, 1997
Simo, J.C., Miehe, C.: Associative coupled thermoplasticity at finite strains: Formulation, numerical analysis and implementation. Comput. Meth. Appl. Mech. Eng. 98(1), 41–104, 1992
Simo, J.C., Pister, K.S.: Remarks on rate constitutive equations for finite deformation problems: computational implications. Comput. Meth. Appl. Mech. Eng. 46(2), 201–215, 1984
Simo, J.C., Taylor, R.L.: Quasi-incompressible finite elasticity in principal stretches. Continuum basis and numerical algorithms. Comput. Methods Appl. Mech. Engrg. 85(3), 273–310, 1991
Simpson, H.C., Spector, S.J.: On copositive matrices and strong ellipticity for isotropic elastic materials. Arch. Ration. Mech. Anal. 84(1), 55–68, 1983
Thorpe, M.F., Jasiuk, I.: New results in the theory of elasticity for two-dimensional composites. Proc. R. Soc. Lond. A Math. Phys. Sci. 438(1904), 531–544, 1992
Trabelsi, K.: Nonlinear thin plate models for a family of Ogden materials. C. R. Math. Acad. Sci. Paris 337(12), 819–824, 2003
Truesdell, C.: General and exact theory of waves in finite elastic strain. Arch. Ration. Mech. Anal. 8, 263–296, 1961
Truesdell, C., Noll, W.: The non-linear field theories of mechanics, 3rd edn. Springer-Verlag, Berlin (2004)
Truesdell, C., Toupin, R.: The classical field theories. In Handbuch der Physik, Bd. III/1, S. Flügge, ed., Springer, Berlin, pp. 226–793, 1960. appendix, pp. 794–858. With an appendix on tensor fields by J. L. Ericksen.
Wang, Y., Aron, M.: A reformulation of the strong ellipticity conditions for unconstrained hyperelastic media. J. Elast. 44(1), 89–96, 1996
Zumbrun, K.: Multidimensional stability of planar viscous shock waves. In: Advances in the Theory of Shock Waves, Freistühler, H., Szepessy, A. (Eds.), vol. 47 of Progress in Nonlinear Differential Equations and Their Applications, Birkhäuser, Boston, pp. 307–516, 2001
Zumbrun, K.: Stability of large-amplitude shock waves of compressible Navier-Stokes equations. In: Friedlander, S., Serre, D. (eds.) Handbook of mathematical fluid dynamics, vol. III, pp. 311–533. North-Holland, Amsterdam (2004)
Zumbrun, K., Serre, D.: Viscous and inviscid stability of multidimensional planar shock fronts. Indiana Univ. Math. J. 48(3), 937–992, 1999
Acknowledgements
The authors are warmly grateful to Heinrich Freistühler for suggesting the problem and for many stimulating conversations. The authors also thank Andrea Corli for kindly calling their attention to his work in [20]. Finally, the authors thank an anonymous referee whose careful revision and sharp comments improved the quality and scope of this paper. This research was supported by DGAPA-UNAM, program PAPIIT, grant IN-104922. The work of F. Vallejo was partially supported by CONACyT (Mexico) through a scholarship for doctoral studies, Grant No. 740356/596608.
Author information
Authors and Affiliations
Corresponding author
Additional information
Communicated by T.-P. Liu.
Publisher's Note
Springer Nature remains neutral with regard to jurisdictional claims in published maps and institutional affiliations.
Appendices
Appendix A. Multidimensional Stability of Planar Shock Fronts
For convenience of the reader, in this section we gather basic information about the stability conditions for multidimensional shock fronts. The reader is referred to the books by Benzoni-Gavage and Serre [10], Majda [71, 72] and Serre [88] for more information. Consider a hyperbolic system of n conservation laws in \(d \ge 2\) space dimensions of the form
where \(x \in {{\mathbb {R}}}^d\) and \(t \ge 0\) are space and time variables, respectively, and \(u \in {\mathcal {U}}\subset {{\mathbb {R}}}^n\) denotes the vector of n conserved quantities (here \({\mathcal {U}}\) denotes an open connected set). The flux functions \(f^j \in C^2({\mathcal {U}}; {{\mathbb {R}}}^n)\), \(j = 1, \ldots , d\), are supposed to be twice continuously differentiable and to determine the flux of the conserved quantities along the boundary of arbitrary volume elements. System (A.1) is hyperbolic in \({\mathcal {U}}\) if for any \(u \in {\mathcal {U}}\) and all \(\xi \in {{\mathbb {R}}}^d\), \(\xi \ne 0\), the matrix
where \(A^j(u) := Df^j(u) \in {{\mathbb {R}}}^{n \times n}\) for each j, is diagonalizable over \({{\mathbb {R}}}\) with eigenvalues
of class at least \(C^1({\mathcal {U}}\times {{\mathbb {R}}}^d; {{\mathbb {R}}})\), called the characteristic speeds. Each eigenvalue \(a_j(\xi ,u)\) is semi-simple (algebraic and geometric multiplicities coincide), with constant multiplicity for all \((u,\xi ) \in {\mathcal {U}}\times {{\mathbb {R}}}^d \backslash \{0\}\). The matrix \(A(\xi ,u)\) has a complete set of right (column) eigenvectors \(r_1(\xi ,u), \ldots , r_n(\xi ,u) \in C^1({{\mathbb {R}}}^d \times {\mathcal {U}};{{\mathbb {R}}}^{n \times 1})\), satisfying \(A(\xi ,u) r_j(\xi ,u) = a_j(\xi ,u) r_j(\xi ,u)\) for each j, as well as a complete set of left (row) eigenvectors \(l_1(\xi ,u), \ldots , l_n(\xi ,u) \in C^1({{\mathbb {R}}}^d \times {\mathcal {U}};{{\mathbb {R}}}^{1 \times n})\), satisfying \(l_j(\xi ,u) A(\xi ,u) = a_j(\xi ,u) l_j(\xi ,u)\).
An important class of weak solutions to (A.1) are known as shock fronts, which are configurations of the form
where \(u^\pm \in {\mathcal {U}}\) are constant states, \(u^+ \ne u^-\), and \({\hat{\nu }} = (\nu _1, \ldots , \nu _d) \in {{\mathbb {R}}}^d\), \(|{\hat{\nu }}| = 1\) is a fixed direction of propagation. The shock speed \(s \in {{\mathbb {R}}}\) is not arbitrary but determined by the classical Rankine-Hugoniot jump conditions [27, 65],
where the bracket \(\llbracket \cdot \rrbracket \) denotes the jump across the interface or, more precisely,
for any (vector or matrix valued) function \(g = g(u)\). Jump conditions (A.5) are necessary conditions for the configuration (A.4) to be a weak solution to (A.1) and express conservation of the state variables u across the interface, \(\Sigma = \{x \cdot {\hat{\nu }} - st = 0 \}\).
To circumvent the problem of non-uniqueness of weak solutions of the form (A.4) one further imposes an entropy condition. The shock front (A.4) is called an admissible (or classical) p-shock if it satisfies Lax entropy condition (cf. [27, 65]): there exists an index \(1 \le p \le n\) such that
where, by convention, if \(p=1\) then \(a_{p-1}({\hat{\nu }}, u^-) := - \infty \), and if \(p = n\) then \(a_{p+1}({\hat{\nu }}, u^+) := +\infty \). In the case where \(p=1\) or \(p=n\) the shock is called extreme. The eigenvalue \(a_p({\hat{\nu }},u)\) is called the principal characteristic speed and \(r_p({\hat{\nu }},u)\) is the principal characteristic field. It is said that the former is genuinely nonlinear in the direction \({\hat{\nu }}\) (cf. Majda [72]) if \(D_u a_p({\hat{\nu }},u)^\top r_p({\hat{\nu }},u) \ne 0\) (or equivalently, \(l_p({\hat{\nu }},u) D_u a_p({\hat{\nu }},u) \ne 0\)) for all \(u \in {\mathcal {U}}\).
Given a base state \(u^+ \in {\mathcal {U}}\), the Hugoniot locus is defined as the set of all states in \({\mathcal {U}}\) that can be connected to \(u^+\) with a speed satisfying the jump conditions (A.5). The intersection of the Hugoniot locus with those states for which one can find a shock speed satisfying Lax entropy condition (A.6) for some \(1 \le p \le n\) is referred to as the p-shock curve. If, in addition, \(u^+ \in {\mathcal {U}}\) is a point of genuine nonlinearity of the p-th characteristic family in direction of \({\hat{\nu }}\), for which \(a_p({\hat{\nu }}, u^+)\) is a simple eigenvalue and
then the p-shock curve locally behaves like
and satisfies Lax entropy condition (A.6) if and only if \(\epsilon < 0\) (respectively, \(\epsilon > 0\)). The parameter \(\epsilon \) measures the strength of the shock, \(|u^+ - u^-| = O(|\epsilon |)\).
It is well known that the nonlinear stability behavior of shock fronts of the form (A.4) is determined by the so called uniform and weak Lopatinskiĭ conditions (see Benzoni-Gavage and Serre [10], Majda [70, 71], Métivier [74,75,76] and the references therein). The analysis to obtain the former departs from a Fourier-Laplace decomposition of the constant-coefficient linearized problem associated with (A.1) at the configuration (A.4). By considering single normal modes of the form \(u \sim e^{\lambda t} e^{\mathrm {i}\xi \cdot x}\) with spatio-temporal frequencies lying on the set
as solutions to the linearized problem around the shock (A.4), one arrives at the Lopatinskiĭ determinant or stability function
where \({\mathcal {R}}_1^-(\lambda ,\xi ), \ldots , {\mathcal {R}}_{p-1}^-(\lambda ,\xi ) \in {{\mathbb {C}}}^{n \times 1}\) denotes a basis of the stable subspace of \({\mathcal {A}}^-(\lambda ,\xi )\), and \({\mathcal {R}}_{p+1}^+(\lambda ,\xi ), \ldots , {\mathcal {R}}_{n}^+(\lambda ,\xi ) \in {{\mathbb {C}}}^{n \times 1}\) denotes a basis of the unstable subspace of \({\mathcal {A}}^+(\lambda ,\xi )\), whereupon we define the matrix fields
Notice that, in view of Lax entropy conditions, the shock is not characteristic with \(s \ne a_p^\pm \) and hence the matrices \(A({\hat{\nu }}, u^\pm ) - s{{\mathbb {I}}}_n\) are not singular. The fact that the stable subspace of \({\mathcal {A}}^-(\lambda ,\xi )\) and the unstable subspace of \({\mathcal {A}}^+(\lambda ,\xi )\) have exactly dimensions \(p-1\) and \(n-p\), respectively, follows from the hyperbolicity of the matrix fields \({\mathcal {A}}^\pm (\lambda ,\xi )\) on the set \(\Gamma _{{\hat{\nu }}}^+\). This result is known in the literature as Hersh’ lemma [49] (see also [10, 55, 88]).
The function \(\Delta \) is jointly analytic in \((\lambda ,\xi ) \in \Gamma _{{\hat{\nu }}}^+\) and homogeneous of degree one. Also, by continuity of the eigenprojections, the Lopatinskiĭ determinant can be defined for all frequencies within the set
(see [62, 70, 71, 74] for further information). The stability function \(\Delta \) determines the solvability of the linearized equations by wave solutions that violate an \(L^2\) well-posedness estimate. Whenever a zero of \(\Delta \) occurs then there exist spatially decaying solutions with time growth rate \(\exp (t \, \mathrm{Re}\,\lambda )\). Thus, a necessary condition for well-posedness of the linearized problem is that \(\Delta \) does not vanish in the open set \(\Gamma _{{\hat{\nu }}}^+\). A stronger condition requires \(\Delta \) not to vanish in the whole frequency set \(\Gamma _{{\hat{\nu }}}\) (allowing time frequencies with \(\mathrm{Re}\,\lambda = 0\)) and it is sufficient for the well-posedness of the nonlinear system, as the analyses of Majda [70, 71] and Métivier [74, 75] show. To sum up, we have the following
Definition A.1
Consider a planar shock wave of the form (A.4) and its corresponding Lopatinskiĭ determinant defined in (A.10). If \(\Delta \) has no zeroes \((\lambda ,\xi )\) in \(\Gamma _{{\hat{\nu }}}\) the shock is called uniformly stable (uniform Lopatinskiĭ condition). If \(\Delta \) has a zero \((\lambda ,\xi )\) in \(\Gamma _{{\hat{\nu }}}^+\) (with \(\mathrm{Re}\,\lambda > 0\)) the shock is referred to as strongly unstable. In the intermediate case where \(\Delta \) has some zero \((\lambda ,\xi )\) with \(\mathrm{Re}\,\lambda = 0\) but no zero in \(\Gamma _{{\hat{\nu }}}^+\) the shock is said to be weakly stable (weak Lopatinskiĭ condition).
Remark A.2
When a shock is extreme with \(p=1\) then there is no stable subspace of \(\mathcal {A}^-(\lambda ,{\tilde{\xi }})\) for \((\lambda ,{\tilde{\xi }}) \in \Gamma _{{{\hat{\nu }}}}^+\) and the unstable subspace of \(\mathcal {A}^+(\lambda ,{\tilde{\xi }})\) has dimension \(n-1\). Therefore, the left stable subspace of \(\mathcal {A}^+(\lambda ,{\tilde{\xi }})\) is generated by a single (row) vector \(l_+^s(\lambda ,{\tilde{\xi }})\) associated to a unique stable eigenvalue \(\beta (\lambda ,{\tilde{\xi }})\) with \(\mathrm{Re}\,\beta < 0\). In such a case the expression for the Lopatinskiĭ determinant simplifies to
in the sense that \(\Delta = 0\) in \(\Gamma _{{{\hat{\nu }}}}^+\) if and only if \({\overline{\Delta }} = 0\) in \(\Gamma _{{{\hat{\nu }}}}^+\) (see [10, 55, 88]).
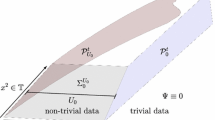
When a shock is strongly unstable, the instability is of Hadamard type [45, 88] and it is so violent that we practically never observe the shock evolve in time. In contrast, any small initial perturbation around a strongly stable shock (that is, a small wave impinging on the interface), compatible with the conservation laws and the jump conditions, produces a (local-in-time) solution to the nonlinear system with the same wave structure, that is, made of smooth regions separated by a (modified or curved) shock front. As shown by Majda [71], the strong stability condition ensures the well-posedness of a non-standard constant coefficient initial boundary value problem. The intermediate case of a weakly stable shock for which there exist zeroes of the Lopatinskiĭ determinant on the imaginary axis (\(\Delta (\mathrm {i}\tau ,{\tilde{\xi }}) = 0\), for frequencies \((\mathrm {i}\tau , \xi ) \in \partial \Gamma _{{\hat{\nu }}}^+\), \(\tau \in {{\mathbb {R}}}\)) refers to the existence of surface wave solutions localized near the shock, having the form \(\Phi (|x\cdot {\hat{\nu }}|) e^{\mathrm {i}(\tau t + x\cdot \xi )}\) and with amplitude \(\Phi \) decaying exponentially as we move away from the interface, \(|x\cdot {\hat{\nu }}| \rightarrow \infty \).
Appendix B. Compressible Hyperelastic Materials of Hadamard Type
An hyperelastic material of Hadamard type (cf. [48, 57]) is defined as an elastic material whose energy density function has the general form (1.1), where \(\mu > 0\) is a constant and \(h : (0,\infty ) \rightarrow {{\mathbb {R}}}\) is a function of class \(C^3\). According to custom, let us denote that
\(I^{(1)}\) and \(I^{(d)}\) are well-known principal invariants of the right Cauchy-Green tensor, \(C = U^\top U\), for any given deformation gradient \(U \in {{\mathbb {M}}}^d_+\). Hence, energy densities for compressible Hadamard materials have the (Rivlin-Ericksen) form
The constant \(\mu > 0\) is the classical shear modulus in the reference configuration, describing an object’s tendency to deform its shape at constant volume when acted upon opposing forces. The energy density (B.1) consists of two contributions: the first term is the isochoric part of the energy, quantifying energy changes at constant volume and depending only on \(I^{(1)}\), whereas the second one, the volumetric function \(h = h(J)\), quantifies energy changes due to changes in volume, and depends only on \(J = \det U \in (0,\infty )\). In this paper, it is assumed that the function h satisfies the regularity assumption (\(\hbox {H}_1\)) (\(h \in C^3\)), the convexity condition for the energy (\(\hbox {H}_2\)) (\(h'' > 0\)) and the material convexity condition (\(\hbox {H}_3\)) (\(h''' < 0\)).
Remark B.1
Hayes [48] calls restricted Hadamard materials to those which, in addition to (\(\hbox {H}_1\)) and (\(\hbox {H}_2\)), satisfy
a condition which guarantees that the elastic medium fulfills the ordered forces inequality of Coleman and Noll [19]. Even though some of the examples of elastic materials presented in this paper satisfy inequality (B.2), the latter plays no role in the shock stability analysis.
1.1 B.1. Stress fields
We now derive the first Piola-Kirchhoff and Cauchy stress tensors from any energy density function of the form (1.1).
Lemma B.2
For a general compressible elastic model with energy density of the form \(W = {\overline{W}}(I^{(1)}, J)\) in any dimension \(d \ge 2\), the first Piola-Kirchhoff stress tensor is given by
Moreover, the Cauchy stress tensor is
Proof
Follows from elementary computations: since \(I^{(1)} = \sum _{h,k=1}^d U_{hk}^2\) then clearly \(\partial _{U_{ij}} I^{(1)} = 2 U_{ij}\), \(1 \le i, j \le d\); on the other hand, expression (2.11) above yields
This shows (B.3). Now, since the Cauchy stress tensor T is related to \(\sigma \) by \(\sigma = J T U^{-\top }\) (cf. [4, 17]), apply (1.2) to obtain (B.4), as claimed. \(\square \)
We immediately have
Corollary B.3
For compressible hyperelastic materials of Hadamard type, the first Piola-Kirchhoff stress tensor is given by
Furthermore, the Cauchy stress tensor is
Proof
Follows directly from (B.1) and Lemma B.2. \(\square \)
Given any deformation gradient \(U \in {{\mathbb {M}}}^d_+\), the principal stretches \(\vartheta _j > 0\), \(j = 1, \ldots , d\), are the square roots of the eigenvalues of the symmetric right Cauchy-Green tensor. Therefore,
The following observation is a generalization of the result established by Currie [24] in dimension \(d = 3\).
Proposition B.4
For any \(d \ge 2\) the possible range for \(I^{(1)}\) is given by
Proof
It is a straightforward application of the inequality of arithmetic and geometric means on the principal stretches,
\(\square \)
The boundary of the domain \(\partial \mathcal {D} = \{ (I^{(1)},J) \, : \, I^{(1)} = d J^{2/d}\}\) is associated to pure pressure deformations, and the value \((I^{(1)},J) = (d,1) \in \partial \mathcal {D}\) corresponds to no deformations, \(U = {{\mathbb {I}}}_d\), with a reference configuration in which \(\vartheta _j = 1\) for all \(1 \le j \le d\).
1.2 B.2. Compressible neo-Hookean materials
The simplest interpretation of an elastic Hadamard material is as a compressible extension of a neo-Hookean incompressible solid. Incompressible hyperelasticity is restricted to isochoric (volume preserving) deformations with \(J = \det U =1\), which is a kinematic constraint. The best known incompressible hyperelastic model is the neo-Hookean material [63, 84, 99], whose energy function (in arbitrary space dimensions) is given by
This strain-energy function provides a reliable and mathematically simple constitutive model for the nonlinear deformation behavior of isotropic hyperelastic materials, such as vulcanized rubber, similar to Hooke’s law. It predicts typical effects known from nonlinear elasticity within the small strain domain (in contrast to linear elastic materials the stress-strain curve for a neo-Hookean material is not linear). It was first proposed by Rivlin in 1948 [84]. Notably, the energy function (B.7) may also be derived from statistical theory, in which rubber is regarded as a three-dimensional network of long-chain molecules that are connected at a few points (cf. [12, 52]).
The incompressibility hypothesis works well for vulcanized rubber (under very high hydrostatic pressure the material undergoes very small volume changes). There are other materials, however, which are either slightly compressible, or which may undergo considerable volume changes (like foamed rubber). Therefore, compressible models are needed in order to describe these elastic responses. Furthermore, it is known that incompressibility can cause numerical difficulties in the analysis of finite elements, and in such cases nearly incompressible models are often used [54, 66]. As a result, either motivated by numerical or by physical considerations, compressibility is often accounted by the addition of a strain energy describing the purely volumetric elastic response. In the case of the neo-Hookean model, compressible extensions have the form
This decoupled representation of the energy as the sum of isochoric and volumetric energies is very common for isothermal deformations. A compressible extension should satisfy \({\overline{W}}(I^{(1)},1) = {\overline{W}}_{\!\mathrm {nH}}(I^{(1)})\), that is, \({\overline{W}}_{\!\mathrm {vol}}(1) = 0\). In the case of energies of the form (1.1) we clearly have an isochoric contribution given by the neo-Hookean energy density (B.7) and a volumetric response given by \({\overline{W}}_{\!\mathrm {vol}}(J) = h(J) +\tfrac{1}{2}\mu d\). Pence and Gou [81] discuss nearly incompressible versions of the neo-Hookean model, as well as the requirements on the material moduli for the models to be compatible with the small-strain regime. In the next section we review such requirements and extrapolate them to arbitrary space dimensions.
1.3 B.3. Compressible theory of infinitesimal strain
Since undeformed configurations are stress free, one requires that \(\sigma = 0\) whenever \(U = {{\mathbb {I}}}_d\). In the case of a Hadamard material, this requirement leads, upon substitution into formula (B.5), to the following relation between the shear modulus and the function h,
This relation can be interpreted as a free stress condition for no deformations in the incompressible boundary, precisely at \((I^{(1)},J) = (d,1) \in \partial \mathcal {D}\).
The mean pressure field is defined as (see, e.g., [100], p. 545),
For symmetric deformation states, \(U = J^{1/d} {{\mathbb {I}}}_d\) (or equivalently, \((I^{(1)},J) \in \partial \mathcal {D}\)), Pence and Gou [81] define
where
is the hydrostatic pressure (cf. [52, 99]), or the pressure the material experiences when the shear strain is zero. The appropriate definition of the bulk modulus of infinitesimal strain theory is therefore
describing volumetric elasticity or how resistant to compression the elastic medium is. Consequently, for a Hadamard material with strain energy of the form (1.1) we have \(\partial {\overline{W}} / \partial I^{(1)} = \tfrac{\mu }{2}\) and \(\partial {\overline{W}} / \partial J = h'(J)\), yielding
and the following relation between the bulk and shear moduli:
Since the strain energy must be positive for small strains (linear physical theory for small deformations), on restriction to infinitesimal deformations the shear and bulk moduli must be positive to ensure compatibility with the linear response (cf. [15]). The Poisson ratio can then be defined in arbitrary dimensions as
measuring the ratio of strain in the direction of load over the strain in orthogonal directions. This definition extends the well known formulae for the Poisson ratio in dimension \(d=2\), \({\overline{\nu }} = \frac{\kappa - \mu }{\kappa + \mu }\), and in dimension \(d = 3\), \({\overline{\nu }} = \frac{3\kappa - 2\mu }{2(3\kappa + 2\mu )}\) (see [73, 96]). Although the admissible thermodynamic range for the Poisson ratio is \(-1 \le {\overline{\nu }} \le 1/2\) in dimension \(d = 3\) [81], and \(-1 \le {\overline{\nu }} \le 1\) in dimension \(d = 2\) [73], the standard range for consideration is \({\overline{\nu }} > 0\) (\({\overline{\nu }}\) is usually positive for most materialsFootnote 3 because interatomic bonds realign with deformation). To sum up, in this paper it is assumed that
The classical Lamé moduli of an elastic material are the shear modulus \(\mu > 0\) (second Lamé parameter) and \(\Lambda \) (first Lamé parameter)Footnote 4; the former can be related to the bulk and shear moduli by
see [17, 99]. Notice that, under assumption (B.11), \(\Lambda > 0\).
Remark B.5
In view of (B.9), condition (\(\hbox {H}_3\)) implies that \(p_{\mathrm {hyd}}'' (J) = - h'''(J) > 0\) for all \(J \in (0, \infty )\). Hence, hypothesis (\(\hbox {H}_3\)) can be interpreted as a material convexity condition for zero shear strain.
1.4 B.4. Examples
The following models belong to the class of compressible hyperelastic materials of Hadamard type, whose energy density functions have the form (1.1) and satisfy assumptions (\(\hbox {H}_1\)) and (\(\hbox {H}_2\)). They have been proposed in the materials science literature to describe different elastic responses. It is worth mentioning that there exist compressible models with energies of the form (1.1) but which do not satisfy the convexity assumption (\(\hbox {H}_2\)) for all deformations \(J \in (0,\infty )\), such as the original Simo-Pister model [93] (see also [47]), or the Ogden \(\beta \)-log model [79] (see eq. (6.137), p. 244 in [52]).
1.4.1 \(\mathrm {(a)}\) Ciarlet-Geymonat model
As a first example consider the following volumetric strain energy function
where \(\mu \) and \(\kappa \) are the shear and bulk moduli, respectively, satisfying (B.11). Notice that \(h_{\mathrm {CG}}(1) = -d\mu /2\) and therefore the energy density \({\overline{W}}_{\mathrm {CG}} = \frac{\mu }{2} I^{(1)} + h_{\mathrm {CG}}(J)\) is normalized as \({\overline{W}}_{\mathrm {CG}}(d,1) = 0\). It also satisfies (B.8) and (B.10) as the reader may easily verify. Finally, in view of (B.11) there holds the convexity condition (\(\hbox {H}_2\)) as
In addition, it holds that
for all \(J \in (0,\infty )\). This model is an extension to arbitrary spatial dimensions of the strain energy
proposed by Ciarlet and Geymonat [18] (see also [80]) in dimension \(d = 3\). It is a special form of the family of compressible Mooney-Rivlin materials (see Ciarlet [17], section 4.10, p. 189, formula (iii) in the limit \(b \rightarrow 0\)). \(h_{\mathrm {CG}}\) is defined for all deformations \(J \in (0,\infty )\) and satisfies \(h_{\mathrm {CG}} \rightarrow \infty \) as \(J \rightarrow \infty \) and as \(J \rightarrow 0^+\).
1.4.2 \(\mathrm {(b)}\) Blatz model
The energy function
where, once again, \(\mu \) and \(\kappa \) are the shear and bulk moduli, respectively, generalizes to arbitrary dimensions \(d \ge 2\) the modified compressible neo-Hookean form of the energy proposed by Blatz [13] (see eq. (48), p. 36), in dimension \(d = 3\):
This function fulfills normalization, \(h_{\mathrm {B}}(1) = -d\mu /2\), as well as conditions (B.8) and (B.10), as it is easily verified. Moreover,
for all \(J \in (0,\infty )\). Notice that \(h_{\mathrm {B}} \rightarrow \infty \) as \(J \rightarrow \infty \) or as \(J \rightarrow 0^+\). This energy was selected by Blatz as a candidate strain energy density to describe thermostatic properties of homogeneous isotropic continuous elastomers (elastic polymers).
1.4.3 \(\mathrm {(c)}\) Neo-Hookean Ogden compressible foam material
The energy function
where
was proposed by Ogden [79] to model highly compressible rubber-like materials for which significantly volume changes can occur with relatively little stress (such as foams). It belongs to what is known in the literature as the family of Ogden compressible rubber foam materials (see [69], p. 161):
specialized here to \(N =1\) (neo-Hookean), \(\mu _1 = \mu > 0\), \(\alpha _1 = 2\) and \(c_1\) given above. This neo-Hookean element of the family has been used as a basis for residually stressed extensions for energies that account for elastic responses of blood arteries in medical applications (cf. [41]). Notice that \(h_{\mathrm {O}}(1) = -d\mu /2\) (normalization) and relations (B.8) and (B.10) hold. Moreover, the convexity condition holds as
for all \(J \in (0,\infty )\). Notably \(h_{\mathrm {O}} \rightarrow \infty \) as \(J \rightarrow 0^+\) but \(\lim _{J \rightarrow \infty } h_{\mathrm {O}}(J)\) exists.
1.4.4 \(\mathrm {(d)}\) Levinson-Burgess model
Consider the following volumetric function
where
This is a generalization to any space dimension \(d \ge 2\) of the three dimensional material considered by Kirkinis et al. [59],
which is, in turn, a special case of a compressible polynomial material introduced by Levinson and Burgess [67] to account for weakly compressible elastic media with Poisson ratio close to \(\tfrac{1}{2}\) (in dimension \(d = 3\)). Notice that \(h_{\mathrm {LB}}(1) = -d\mu /2\) (normalization), it satisfies (B.8) and (B.10), and
for all \(J \in (0,\infty )\).
1.4.5 \(\mathrm {(e)}\) Simo-Taylor material
The Simo-Taylor model [94] (see also [47]),
where \(\mu \) is the shear modulus and \(\Lambda = \kappa - 2\mu /d > 0\) is the first Lamé parameter, clearly satisfies \(h_{\mathrm {ST}}(1) = -d\mu /2\) (normalization) and conditions (B.8) and (B.10). Furthermore, the convexity condition (\(\hbox {H}_2\)) holds, as
for all \(J \in (0,\infty )\). Observe also that
When \(J \rightarrow 0^+\) or \(J \rightarrow \infty \), \(h_{\mathrm {ST}}\) grows unboundedly. This energy form can be derived from (Gaussian) statistical mechanics of long-chain molecules with entropic sources of compressibility modeled thorough the logarithmic terms (cf. Bischoff et al. [12]).
1.4.6 \(\mathrm {(f)}\) Special compressible Ogden-Hill material
The volumetric response function
where \(\mu > 0\) is the shear modulus and \(b > 0\) is an empirical coefficient, yields an energy density \({\overline{W}}_{\mathrm {OH}} = \frac{\mu }{2} I^{(1)} + h_{\mathrm {OH}} (J)\) that also belongs to the class of compressible Hadamard materials. Notice that \(W_{\mathrm {OH}}(d,1) = 0\) (normalization) but \(h_{\mathrm {OH}}'(1) = 0\) and, thus, it does not satisfy the free stress condition (B.8). It does satisfy the convexity condition as
for all \(J \in (0,\infty )\). Also, \(h_{\mathrm {OH}} \rightarrow \infty \) as \(J \rightarrow \infty \), whereas \(h_{\mathrm {OH}} (0^+)\) is well-defined. This model is a particular case of the well-known family of compressible Ogden-Hill materials [50, 51, 79]
specialized to \(N =1\), \(\mu _1 = \mu > 0\), \(\alpha _1 = 2\) and \(b_1 = b > 0\). The family was proposed to model highly compressible materials such as low density polymer foams (cf. [31, 77]). The parameter \(b > 0\) is adjusted from experimental data. It is a modulus that measures compressibility: if b is small then the material is highly compressible, whereas if b is large then the material can be considered as nearly incompressible. It is used in the analysis of elastomers, as well as in the design of O-rings, seals and other industrial products [69].
1.4.7 \(\mathrm {(g)}\) Simo-Miehe model
The following energy function proposed by Simo and Miehe [92] (see also [52]):
was introduced in the context of finite-strain viscoplasticity. Note that this volumetric energy attains a minimum at \(J=1\), with \(h_{\mathrm {SM}}'(1) = 0\), and therefore it does not satisfy the free stress condition (B.8). It does, however, satisfy the convexity condition as
for all deformations. Moreover,
Also, \(h_{\mathrm {SM}}\) increases unboundedly as \(J \rightarrow 0^+\) and as \(J \rightarrow \infty \).
1.4.8 \(\mathrm {(h)}\) Bischoff, Arruda and Grosh model
Bischoff et al. [12] proposed the following volumetric response function:
where the constants \({\overline{c}}, b\) are positive empirical constants which should be calibrated from experimental data. Notice that \(h_{\mathrm {BAG}}'(1) = 0\) and \(J = 1\) is a minimum; thus, it does not satisfy (B.8). The convexity condition holds as
for all \(J \in (0,\infty )\). However,
yielding \(h_{\mathrm {BAG}}'''(1) = 0\), as well as \(h_{\mathrm {BAG}}'''(J) > 0\) if \(J > 1\) and \(h_{\mathrm {BAG}}'''(J) < 0\) if \(J < 1\). Note also that \(h_{\mathrm {BAG}} \rightarrow \infty \) as \(J \rightarrow \infty \) but \(h_{\mathrm {BAG}}(0^+)\) is well defined. This model was proposed to account for the contributions of entropy and initial energy to volume change. Its derivation follows non-Gaussian statistics of long chain molecules, which is necessary for large deformations. It can be interpreted as a non-Gaussian, higher order representation of the Ogden-Hill model (B.17) in the small volume changes regime, inasmuch as the series expansion around \(J = 1\) yields
Remark B.6
The energy densities presented above are divided into two categories. Models (a) thru (e) can be interpreted as compressible versions of the neo-Hookean material in the sense described by Pence and Gou [81]: they satisfy the free stress condition (B.8) and the hydrostatic pressure condition (B.10), both at the incompressible limit with no deformation, and represent materials which are nearly incompressible. In contrast, models (f) thru (h) are designed to fit experimental data involving phenomenological observations such as, for example, when foam polymers undergo large changes in volume [54]. In these models, \(h'(1) = 0\), so that the volumetric function h provides a direct penalization of volume departing from \(J =1\). All models (a) thru (h) provide neo-Hookean behavior in the incompressible limit, namely, \({\overline{W}}(I^{(1)},1) = {\overline{W}}_{\!\mathrm {nH}}(I^{(1)})\), and reduce to the standard linearly elastic material response when deformations are small (that is, when \(| \tfrac{1}{2}(U^\top U - {{\mathbb {I}}}_d) | \ll 1\)).
Remark B.7
All the model examples presented here are physically motivated energy functions that satisfy assumptions (\(\hbox {H}_1\)) and (\(\hbox {H}_2\)) for all possible deformations and, therefore, they belong to the general class of compressible hyperelastic Hadamard materials. (It is to be observed that the family does not include other hyperelastic models found in the literature, such as the compressible versions of the Blatz-Ko, Murnaghan or Varga models, just to mention a few; see [52, 80] and the references therein.) Notably, the convexity of the energy (property (\(\hbox {H}_2\))), implies that all energy functions are rank-one convex in the whole domain of U with \(\det U > 0\), making the elastodynamics equations hyperbolic in the whole domain of their state variables. The stability results of this paper apply to materials which, in addition, satisfy the material convexity condition (\(\hbox {H}_3\)).
Rights and permissions
About this article

Cite this article
Plaza, R.G., Vallejo, F. Stability of Classical Shock Fronts for Compressible Hyperelastic Materials of Hadamard Type. Arch Rational Mech Anal 243, 943–1017 (2022). https://doi.org/10.1007/s00205-021-01751-3
Received:
Accepted:
Published:
Issue Date:
DOI: https://doi.org/10.1007/s00205-021-01751-3