
Abstract
The present paper works out a classical-Marxian growth model with an endogenous direction of technical change and a heterogeneous labour force, made up of high-skilled and low-skilled workers. It draws on the Kaleckian mark-up pricing to link wage inequality to the relative unit labour cost at the firm level; on growth cycle models à la Goodwin to formalize the dynamic interaction between labour market and distributive shares of income; on the induced innovation literature to link the bias of technical change to the firm’s choice of the optimal combination of factor-augmenting technologies. We find that, in contrast to the neoclassical literature on skill-biased technical change, the institutional framework that governs the distributional conflict is the ultimate determinant of both wage inequality and the direction of technical change. A decline in low-skilled workers’ bargaining strength or a rise in product market concentration led to both an increase in wage inequality and a bias of technical change favouring high-skilled over low-skilled labour productivity growth. As opposed to the Goodwin model with induced technical change and homogeneous labour force, labour market institutions thus affect steady-state income distribution, capital accumulation and labour productivity growth, and no necessary trade-off arises between labour market regulation and employment. Finally, if the steady-state value of wage inequality exceeds a critical value, an exogenous increase in the mark-up or in the high-skilled workers’ bargaining power allow both capitalists and high-skilled workers to increase their income shares at the expense of the low-skilled workers.




Similar content being viewed by others

Data availability
The MATLAB code that supports the findings of this study is available from the corresponding author upon request.
Notes
Even changes in wage dispersion among workers with the same educational level are ultimately ascribed to a purely technological process, with no room for labour market institutions, as residual inequality is supposed to reflect returns to unobserved individual abilities (Nelson and Phelps 1966; Card and Lemieux 1996; Acemoglu 2002b; Violante 2002; Lemieux 2006).
The more recent literature on directed technical change can be considered as a neoclassical attempt to overcome these criticisms, by combining an endogenous direction of technical change with production of capital goods under monopolistic competition (Acemoglu 2003, 2015). According to this literature, the direction of technical change responds to the profitability incentives of capital goods producers. As intermediate and final goods producers use both capital and (high-skilled and low-skilled) labour inputs, the decision of a profit-maximizing firm producing capital goods will be affected by the relative price and the relative endowment of high-skilled labour in the economy. The implication is that the development of high-skilled labour complementary technologies is induced by the rising supply of high-skilled labour itself. Thus, when the directed technical change approach is applied to skill-biased technical change, neoclassical authors conclude that, in contrast to the induced innovation hypothesis, technical change will be biased towards the relatively more abundant factor (Acemoglu 2002a, 2002b).
For any variable \(x\), \(\dot{x}=dx/dt\) and \(\widehat{x}=\dot{x}/x\).
Equations (10) and (11) provide, of course, a simplified version of the real wage-setting process. A more realistic representation should consider that workers’ claims on wages also depend on price expectations and labour productivity growth, as workers try to keep nominal wage growth in line with the expected increase in the price level and to capture part of the productivity gains. However, in line with most of the previous literature on the steady-state effects of labour market institutions in Goodwin-type models (e.g. Petach and Tavani 2020; Rada et al. 2021, 2022; Cruz and Tavani 2023). I opted for the simpler specifications (10) and (11), where the wage-setting process is only affected by a catch-all institutional variable and – in the case of high-skilled workers – the employment rate. I believe that these simpler specifications can provide some useful insights into the analysis of the steady-state effects of labour market institutions in classical-Marxian models with heterogenous labour force, while keeping the model as simple as possible. Of course, assuming a different wage equation could partly modify the impact of labour market institutions on employment (I would thank an anonymous referee for stressing this point). Exploring the implications of different kinds of wage equations (i.e. introducing a role for price expectation and a partial pass-through from productivity to wages) is left for future research.
See Appendix 1 for the calculation of the expressions for \({f}_{z}^{H{\prime}}\), \({f}_{\mu }^{H{\prime}}\), \({f}_{z}^{L{\prime}}\), and \({f}_{\mu }^{L{\prime}}\).
For a formal proof, see Appendix 2.
For the computation of the slopes of the AK and Z isoclines, see Appendix 3.
For the details of the numerical simulations, see Appendix 4. The numerical simulations are run for illustrative purposes only.
We omit “\(*\)” to save notation.
The coefficient \({a}_{3}\) of the Jacobian matrix is positive if and only if \(\sigma >0\). See Appendix 5.
Of course, there is no denying that additional factors, such as public expenditure in infrastructure capital and R&D, play a crucial role in shaping the technological trajectory of the economy.
For a formal proof, see Appendix 3.
See Gandolfo (2009).
References
Acemoglu D (2002a) Directed technical change. Rev Econ Stud 69(4):781–809. https://doi.org/10.1111/1467-937X.00226
Acemoglu D (2002b) Technical change, inequality, and the labor market. J Econ Lit 40(1):7–72. https://doi.org/10.1257/0022051026976
Acemoglu D (2003) Labor- and capital-augmenting technical change. J Eur Econ Assoc 1(1):1–37. https://doi.org/10.1162/154247603322256756
Acemoglu D (2009) Introduction to modern economic growth. Princeton University Press, Princeton
Acemoglu D (2015) Localised and biased technologies: Atkinson and Stiglitz’s new view, induced innovations, and directed technological change. Econ J 125(583):443–463. https://doi.org/10.1111/ecoj.12227
Acemoglu D, Autor D (2012) What does human capital do? A review of Goldin and Katz’s The race between education and technology. J Econ Lit 50(2):426–463. https://doi.org/10.1257/jel.50.2.426
Acemoglu D, Aghion P, Violante GL (2001) Deunionization, technical change and inequality. Carnegie-Rochester conf. ser. public policy 55(1):229–264. https://doi.org/10.1016/S0167-2231(01)00058-6
Aghion P, Howitt P (2010) The Economics of Growth. MIT Press, Cambridge
Barrales-Ruiz J, Mendieta-Muñoz I, Rada C, Tavani D, von Arnim R (2021) The distributive cycle: Evidence and current debates. J Econ Surv 36(2):468–503. https://doi.org/10.1111/joes.12432
Bertola G, Blau FD, Kahn LM (2002) Comparative Analysis of Labor Market Outcomes: Lessons for the Us from International Long-Run Evidence. Evidence. In: Krueger A, Solow R (eds) The Roaring Nineties: Can Full Employment Be Sustained? Russell Sage and Century Foundations, New York, pp 159–218
Blecker RA, Setterfield M (2019) Heterodox macroeconomics: Models of demand, distribution and growth. Edward Elgar, Cheltenham
Botta A (2017) The complex inequality-innovation-public investment nexus: What we (don’t) know, what we should know and what we have to do. Forum Soc Econ 46(3):275–298. https://doi.org/10.1080/07360932.2016.1150867
Brugger F, Gehrke C (2017) The neoclassical approach to induced technical change: from Hicks to Acemoglu. Metroeconomica 68(4):730–776. https://doi.org/10.1111/meca.12141
Brugger F, Gehrke C (2018) Skilling and deskilling: technological change in classical economic theory and its empirical evidence. Theory Soc 47:663–689. https://doi.org/10.1007/s11186-018-9325-7
Card D, Lemieux T (1996) Wage dispersion, returns to skill, and black-white wage differentials. J Econom 74(2):319–361. https://doi.org/10.1016/0304-4076(95)01757-7
Card D, Lemieux T (2001) Can falling supply explain the rising return to college for younger man? A Cohort-based analysis. Q J Econ 116:705–746. https://doi.org/10.1162/00335530151144140
Card D, Lemieux T, Riddell CW (2004) Unions and wage inequality. J Labor Res 25:519–562. https://doi.org/10.1007/s12122-004-1011-z
Carvalho L, Lima GT, Serra GP (2024) Household debt, knowledge capital accumulation, and macrodynamic performance. J Post Keynes Econ 47(1):84–116. https://doi.org/10.1080/01603477.2023.2170247
Carvalho L, Rezai A (2016) Personal income inequality and aggregate demand. Camb J Econ 40(2):491–505. https://doi.org/10.1093/cje/beu085
Checchi D, García-Peñalosa C (2008) Labour market institutions and income inequality. Econ Policy 23(56):602–649. https://doi.org/10.1111/j.1468-0327.2008.00209.x
Cozzens SE, Kaplinsky R (2009) Innovation, poverty and inequality: Cause, coincidence, or co-evolution? In: Lundvall B, Joseph KJ, Chaminade C, Vang J (eds) Handbook of innovation systems and developing countries. Edward Elgar, Cheltenham and Northampton
Cruz MD, Tavani D (2023) Secular stagnation: A classical-Marxian view. Rev Keynes Econ 11(4):554–584. https://doi.org/10.4337/roke.2023.04.06
Desai M (1973) Growth cycles and inflation in a model of the class struggle. J Econ Theory 6(6):527–545. https://doi.org/10.1016/0022-0531(73)90074-4
Desai M, Henry B, Mosley A, Pemberton M (2006) A clarification of the Goodwin model of the growth cycle. J Econ Dyn Control 30(12):2661–2670. https://doi.org/10.1016/j.jedc.2005.08.006
Dosi G, Nelson RR (2010) Technical change and industrial dynamics as evolutionary processes. In Handbook of the Economics of Innovation, (volume 1, pp 51-127)https://doi.org/10.1016/S0169-7218(10)01003-8
Dosi G, Nelson RR (2018) Technological advance as an evolutionary process. In: Nelson RR, Dosi G, Helfat CE, Pyka A, Saviotti PP, Lee K, Dopfer K, Malerba F, Winter SG (eds) Modern evolutionary economics: an overview. Cambridge University Press, Cambridge, pp 35–84. https://doi.org/10.1017/9781108661928
Duménil G, Lévy D (2010) The classical-Marxian evolutionary model of technical change. Application to historical tendencies. In: Setterfield M (ed) Handbook of Alternative Theories of Economic Growth. Edward Elgar Publishing. https://doi.org/10.4337/9781849805582.00020
Duménil G, Lévy D (1995) A stochastic model of technical change: An application to the US economy (1869–1989). Metroeconomica 46(3):213–245. https://doi.org/10.1111/j.1467-999X.1995.tb00380.x
Dutt AK (2010) Keynesian growth theory in the 21st century. In: Arestis P, Sawyer M (eds) Twenty-first century Keynesian economics. Palgrave Macmillan, London, pp 39–80. https://doi.org/10.1057/9780230285415_2
Dutt AK (2017) Income inequality, the wage share, and economic growth. Rev Keynes Econ 5(2):170–195. https://doi.org/10.4337/roke.2017.02.03
Dutt AK, Veneziani R (2011) Education, growth and distribution: classical-Marxian economic thought and a simple model. Cah Econ Polit 61(2):157–185. https://doi.org/10.3917/cep.061.0157
Dutt AK, Veneziani R (2019) Education and ‘human capitalists’ in a classical-Marxian model of growth and distribution. Camb J Econ 43(2):481–506. https://doi.org/10.1093/cje/bey025
Dutt AK, Veneziani R (2020) A classical model of education, growth, and distribution. Macroecon Dyn 24(5):1186–1221. https://doi.org/10.1017/S1365100518000755
Farber HS, Herbst D, Kuziemko I, Naidu S (2021) Unions and Inequality over the Twentieth Century: New Evidence from Survey Data. Q J Econ 136(3):1325–1385. https://doi.org/10.1093/qje/qjab012
Fiorio C, Mohun S, Veneziani R (2013) Social democracy and distributive conflict in the UK, 1950-2010. University of Massachusetts Amherst, Economics Department Working Paper Series 157
Foley DK (2003) Endogenous technical change with externalities in a classical growth model. J Econ Behav Organ 52(2):167–189. https://doi.org/10.1016/S0167-2681(03)00020-9
Foley DK, Michl TR, Tavani D (2019) Growth and distribution. Harvard University Press, Cambridge
Gandolfo G (2009) Economic Dynamics. Springer Verlag, Berlin
Goldin C, Katz LF (2008) The race between education and technology. Harvard University Press, Cambridge
Goodwin R (1967) A growth cycle. In: Feinstein C (ed) Socialism, capitalism, and economic growth. Cambridge University Press, Cambridge, pp 54–58
Hein E, Prante FJ (2020) Functional distribution and wage inequality in recent Kaleckian growth models. In: Bougrine H, Rochon LP (eds) Economic growth and macroeconomic stabilization policies in post-Keynesian economics. Edward Elgar, Cheltenham, pp 33–49. https://doi.org/10.4337/9781786439574.00011
Hicks JR (1932) The theory of wages. Palgrave Macmillan, London
Hornstein A, Krusell P, Violante GL (2005) The effects of technical change on labor market inequalities. In: Aghion P, Durlauf SN (eds) Handbook of economic growth, 1B edn. Elsevier, Amsterdam, pp 1275–1370. https://doi.org/10.1016/S1574-0684(05)01020-8
Julius AJ (2005) Steady-state growth and distribution with an endogenous direction of technical change. Metroeconomica 56(1):101–125. https://doi.org/10.1111/j.1467-999X.2005.00209.x
Kapeller J, Schütz B (2014) Debt, boom, bust: a theory of Minsky-Veblen cycles. J Post Keynes Econ 36(4):781–814. https://doi.org/10.2753/PKE0160-3477360409
Kapeller J, Schütz B (2015) Conspicuous consumption, inequality and debt: the nature of consumption driven profit-led regimes. Metroeconomica 66(1):51–70. https://doi.org/10.1111/meca.12061
Katz L, Autor D (1999) Changes in the wage structure and earnings inequality. In: Ashenfelter O, Card D (eds) Handbook of labor economics, 3rd edn. Elsevier, Amsterdam, pp 1463–1555. https://doi.org/10.1016/S1573-4463(99)03007-2
Kemp-Benedict E (2019) Cost share-induced technological change and Kaldor’s stylized facts. Metroeconomica 70(1):2–23. https://doi.org/10.1111/meca.12223
Kemp-Benedict E (2022) A classical-evolutionary model of technological change. J Evol Econ 32(4):1303–1343. https://doi.org/10.1007/s00191-022-00792-5
Kennedy C (1964) Induced bias in innovation and the theory of distribution. Econ J 74(295):541–547. https://doi.org/10.2307/2228295
Keynes JM (1936) The general theory of employment, interest, and money. Palgrave Macmillan, London
Koeniger W, Leonardi M, Nunziata L (2007) Labor market institutions and wage inequality. Ind Labor Relat Rev 60(3):340–356. https://doi.org/10.1177/001979390706000302
Krusell P, Ohanian LE, Ríos-Rull JV, Violante GL (2000) Capital-skill complementarity and inequality: A macroeconomic analysis. Econometrica 68(5):1029–1053. https://doi.org/10.1111/1468-0262.00150
Kurz HD, Salvadori N (1995) Theory of production: A long-period analysis. Cambridge University Press, Cambridge
Lavoie M (2009) Cadrisme within a post-Keynesian model of growth and distribution. Rev Political Econ 21(3):369–391. https://doi.org/10.1080/09538250903073396
Lazonick W, Mazzucato M (2013) The risk-reward nexus in the innovation-inequality relationship. Who takes the risks? Who gets the rewards? Ind Corp Chang 22(4):1093–1128. https://doi.org/10.1093/icc/dtt019
Lemieux T (2006) Increasing residual wage inequality: composition effects, noisy data, or rising demand for skill? Am Econ Rev 96(3):461–498. https://doi.org/10.1257/aer.96.3.461
Lewis WA (1954) Economic development with unlimited supplies of labor. Manch Sch 22(2):139–191. https://doi.org/10.1111/j.1467-9957.1954.tb00021.x
Lima GT, Carvalho L, Serra GP (2021) Human capital accumulation, income distribution, and economic growth: A demand-led analytical framework. Rev Keynes Econ 9(3):319–336. https://doi.org/10.4337/roke.2021.03.02
Lindbeck A, Snower DJ (1996) Reorganization of firms and labor-market inequality. Am Econ Rev 86(2):315–321
Lucas RE (1988) On the mechanics of economic development. J Monet Econ 22(1):3–42. https://doi.org/10.1016/0304-3932(88)90168-7
Marx K (1976) Capital: A critique of political economy. Penguin Books, London
Mazzucato M (2013) The entrepreneurial state. Anthem Press
Mishel L, Bivens J (2021) Identifying the policy levers generating wage suppression and wage inequality. Economic Policy Institute Working Papers report 215903
Mohun S, Veneziani R (2008) Goodwin cycles and the U.S. economy, 1948–2004. In: Flaschel P, Landesmann M (eds) Mathematical economics and the dynamics of capitalism. Routledge, London, pp 107–130
Nelson RR, Phelps ES (1966) Investment in humans, technological diffusion, and economic growth. Am Econ Rev 56:69–75
Neto ASM, Ribeiro RSM (2019) A Neo-Kaleckian model of skill-biased technological change and income distribution. Rev Keynes Econ 7(3):292–307. https://doi.org/10.4337/roke.2019.03.02
Nishi H (2020) A two-sector Kaleckian model of growth and distribution with endogenous productivity dynamics. Econ Model 88:223–243. https://doi.org/10.1016/j.econmod.2019.09.032
Okishio N (1961) Technical change and the rate of profit. Kobe University Economic Review 7:86–99
Ortigueira S (2013) The rise and fall of centralized wage bargaining. Scand J Econ 115(3):825–855. https://doi.org/10.1111/sjoe.12018
Palley TI (2015a) A neo-Kaleckian-Goodwin model of capitalist economic growth: monopoly power, managerial pay and labour market conflict. Camb J Econ 38(6):1355–1372. https://doi.org/10.1093/cje/bet001
Palley TI (2015b) The middle class in macroeconomics and growth theory: a three-class neo-Kaleckian-Goodwin model. Camb J Econ 39(1):221–243. https://doi.org/10.1093/cje/beu019
Palley TI (2017a) Wage- vs profit-led growth: the role of the distribution of wages in determining regime character. Camb J Econ 41(1):49–61. https://doi.org/10.1093/cje/bew004
Palley TI (2017b) Inequality and growth in neo-Kaleckian and Cambridge growth theory. Rev Keynes Econ 5(2):146–169. https://doi.org/10.4337/roke.2017.02.02
Petach L, Tavani D (2020) Income shares, secular stagnation and the long-run distribution of wealth. Metroeconomica 71(1):235–255. https://doi.org/10.1111/meca.12277
Piketty T (2014) Capital in the twenty-first century. Harvard University Press, Cambridge. https://doi.org/10.4159/9780674982918
Piketty T, Saez E (2003) Income inequality in the United States, 1913–1998. Q J Econ 118(1):1–41. https://doi.org/10.1162/00335530360535135
Prante FJ (2018) Macroeconomic effects of personal and functional income inequality: Theory and empirical evidence for the US and Germany. Panoeconomicus 65(3):289–318. https://doi.org/10.2298/PAN1803289P
Rada C (2012) Social security tax and endogenous technical change in an economy with an aging population. Metroeconomica 63(4):727–756. https://doi.org/10.1111/j.1467-999X.2012.04162.x
Rada C, Schiavone A, von Arnim R (2022) Goodwin, Baumol & Lewis: How structural change can lead to inequality and stagnation. Metroeconomica 73(4):1070–1093. https://doi.org/10.1111/meca.12390
Rada C, Santetti M, Schiavone A, von Arnim R (2021) Post-Keynesian vignettes on secular stagnation: From labor suppression to natural growth. University of Utah, Department of Economics Working Paper Series no. 2021-05
Rada C, Tavani D, von Arnim R, Zamparelli L (2023) Classical and Keynesian models of inequality and stagnation. J Econ Behav Organ 211(6):442–461. https://doi.org/10.1016/j.jebo.2023.05.015
Salter WEG (1960) Productivity and technical change. Cambridge University Press, Cambridge
Samuelson PA (1965) A theory of induced innovation along Kennedy-Weizsäcker lines. Rev Econ Stat 47(4):343–356. https://doi.org/10.2307/1927763
Shah A, Desai M (1981) Growth cycles with induced technical change. Econ J 91(364):1006–1010. https://doi.org/10.2307/2232506
Skott P (2010) Growth, instability and cycles: Harrodian and Kaleckian models of accumulation and income distribution. In: Setterfield M (ed) Handbook of alternative theories of economic growth. Edward Elgar, Cheltenham, pp 108–131. https://doi.org/10.4337/9781849805582.00011
Tavani D (2012) Wage bargaining and induced technical change in a linear economy: Model and application to the US (1963–2003). Struct Chang Econ Dyn 23(2):117–126. https://doi.org/10.1016/j.strueco.2011.11.001
Tavani D (2013) Bargaining over productivity and wages when technical change is induced: implications for growth, distribution, and employment. J Econ 109:207–244. https://doi.org/10.1007/s00712-012-0287-3
Tavani D, Vasudevan R (2014) Capitalists, workers, and managers: wage inequality and effective demand. Struct Chang Econ Dyn 30:120–131. https://doi.org/10.1016/j.strueco.2014.05.001
Tavani D, Zamparelli L (2015) Endogenous technical change, employment and distribution in the Goodwin model of the growth cycle. Stud Nonlinear Dyn Econom 19(2):209–226. https://doi.org/10.1515/snde-2013-0117
Tavani D, Zamparelli L (2016) Public capital, redistribution and growth in a two-class economy. Metroeconomica 67(2):458–476. https://doi.org/10.1111/meca.12105
Tavani D, Zamparelli L (2018) Endogenous technical change in alternative theories of growth and distribution. In: Veneziani R, Zamparelli L (eds) Analytical political economy. Wiley-Blackwell, Hoboken, pp 139–174. https://doi.org/10.1002/9781119483328.ch6
Tavani D, Zamparelli L (2020) Growth, income distribution and the ‘entrepreneurial state.’ J Evol Econ 30(1):117–141. https://doi.org/10.1007/s00191-018-0555-7
Tinbergen J (1975) Income distribution: Analysis and policies. North-Holland, Amsterdam
Uzawa H (1965) Optimum technical change in an aggregative model of growth. Int Econ Rev 6(1):18–31. https://doi.org/10.2307/2525621
van der Ploeg F (1987) Growth cycles, induced technical change, and perpetual conflict over the distribution of income. J Macroecon 9(1):1–12. https://doi.org/10.1016/S0164-0704(87)80002-2
Veneziani R, Mohun S (2006) Structural stability and Goodwin’s growth cycle. Struct Chang Econ Dyn 17(4):437–451. https://doi.org/10.1016/j.strueco.2006.08.003
Violante GL (2002) Technological acceleration, skill transferability, and the rise in residual inequality. Q J Econ 117(1):297–338. https://doi.org/10.1162/003355302753399517
Zamparelli L (2015) Induced innovation, endogenous technical change and income distribution in a labor-constrained model of classical growth. Metroeconomica 66(2):243–262. https://doi.org/10.1111/meca.12068
Acknowledgements
I am grateful to Luca Zamparelli for his support and guidance throughout the different stages of this work. Moreover, I am indebted to Daniele Tavani, as well as all participants at the 25th FMM Conference and the 33rd EAEPE Conference, for their precious comments and suggestions on earlier drafts of this paper. Finally, I wish to thank the editor and two anonymous referees for their carefully reading and suggestions, that have greatly improved this work. All remaining errors and omissions are, of course, my sole responsibility.
Funding
This work is part of the author’s Ph.D. thesis at the Department of Economics and Statistics at the University of Siena (Italy). It was supported by a three-year Ph.D. scholarship from the Tuscany Region (Italy).
Author information
Authors and Affiliations
Corresponding author
Ethics declarations
Conflicts of interest
The author has no competing interests to declare that are relevant to the content of this article.
Additional information
Publisher's Note
Springer Nature remains neutral with regard to jurisdictional claims in published maps and institutional affiliations.
Appendices
Appendix 1
Remind that \({\phi }_{{\widehat{a}}_{H}{\widehat{a}}_{L}}^{{\prime}{\prime}}=0\). Then, substituting Eqs. (17) and (18) into Eqs. (15) and (16), we find:
Totally differentiating Eqs. (28) and (29) with respect to \(z\) and \(\mu\) and rearranging, we have:
It follows that:
where \(\rho \equiv {\phi }_{{\widehat{a}}_{L}{\widehat{a}}_{L}}^{{\prime}{\prime}}/{\phi }_{{\widehat{a}}_{H}{\widehat{a}}_{H}}^{{\prime}{\prime}}\).
Appendix 2
Taking logarithms of Eq. (5), after substituting from Eq. (12), and differentiating with respect to time, we find:
Taking logarithms of Eq. (6), after substituting from Eq. (12), and differentiating with respect to time, we find:
Thus, \(\dot{z}/z=\dot{e}/e=0\) implies \({\dot{\omega }}_{H}/{\omega }_{H}={\dot{\omega }}_{L}/{\omega }_{L}=0\).
Taking logarithms of \(\pi =1-{\omega }_{H}-{\omega }_{L}\) and differentiating with respect to time, we find:
Thus, \({\dot{\omega }}_{H}/{\omega }_{H}={\dot{\omega }}_{L}/{\omega }_{L}=0\) implies \(\dot{\pi }/\pi =0\).
Taking logarithms of Eq. (5), after substituting from Eq. (12), and differentiating with respect to time, we find:
Thus, \(\dot{z}/z=\dot{e}/e=0\) implies \(\dot{p}/p={\dot{w}}_{L}/{w}_{L}-{\dot{a}}_{L}/{a}_{L}\).
Using Eq. (20), we have:
Thus, \(\dot{z}/z=\dot{e}/e=0\) implies \(\dot{p}/p={\dot{w}}_{H}/{w}_{H}-{\dot{a}}_{H}/{a}_{H}\).
Appendix 3
Differentiating Eqs. (25) and (26) with respect to \(z\), we find:
After simplifying and rearranging, we have:
Accordingly, \({\left.de/dz\right|}_{AK}>0\) if and only if \(z<\overline{z }\), whereas \({\left.de/dz\right|}_{Z}>0\) if and only if \({h}_{e}{\prime}+{\Gamma }_{\mu }{\mu }_{e}{\prime}>0\) (remind that \({\Gamma }_{\mu }\equiv \left(1-\rho z\right){f}_{\mu }^{{L}{\prime}}\)).
Differentiating Eqs. (25) and (26) with respect to \(\gamma\), we find:
After simplifying and rearranging, we have:
Accordingly, \({\left.\partial e/\partial \gamma \right|}_{Z}>0\) if and only if \({h}_{e}{\prime}+{\Gamma }_{\mu }{\mu }_{e}{\prime}>0\) (remind that \({\Gamma }_{\mu }\equiv \left(1-\rho z\right){f}_{\mu }^{{L}{\prime}}\)).
Appendix 4
For the numerical simulation, we specify the functional forms of Eqs. (10), (12), and (13), as follows:
Equation (50) is a quadratic function for the innovation possibility frontier with \({\phi }_{{\widehat{a}}_{L}{\widehat{a}}_{L}}^{{\prime}{\prime}}=-1\). We assume a non-linear specification for the relation between wage and employment, as in Desai et al. (2006), but we express it as a nominal Phillips curve (Eq. (51)). Equation (53) is a non-linear specification for the relation between mark-up and high-skilled employment rate, such that if \(e\to 1\), then \(\mu \to \gamma\) and \(\pi \to \gamma /(1+\gamma )\), if \(e\to 0\), then \(\mu \to \infty\) and \(\pi \to 1\).
In this case, \({\widehat{a}}_{H}\) and \({\widehat{a}}_{L}\) are given by:
Thus, the dynamical system becomes:
In the baseline scenario (Fig. 1a), we set the parameters as follows:
Figures 2a, 3a, 4a display the long-run equilibrium values corresponding to a 1-percentage-point increase in \(\alpha\) (i.e. \(\alpha =-0.19\)), a 1-percentage-point increase in \(\beta\) (i.e. \(\beta =0.05\)), and a 0.5-percentage-points increase in \(\gamma\) (i.e. \(\gamma =0.35\)), respectively.
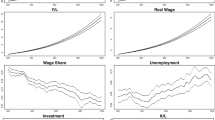
Figure

Convergence to the steady state in the baseline scenario. a) Case I: \({z}^{*}<\overline{z }\),b) Case II: \({z}^{*}>\overline{z }\). Note: Time series of wage inequality (\(z\)), high-skilled employment rate (\(e\)), and output–capital ratio (\({a}_{K}\)) in the baseline scenario. Initial values: \(z(0)=1.3\), \(e(0)=0.7\), \({a}_{K}(0)=0.2\)
Fig. 5a shows that the dynamical system is locally stable in the baseline scenario. Small changes in the parameter values do not alter the stability properties of the system.
In the baseline scenario (Fig. 1b), we set the parameters as follows:
Figures 2b, 3b, 4b display the long-run equilibrium values corresponding to a 1-percentage-point increase in \(\alpha\) (i.e. \(\alpha =-0.26\)), a 1-percentage-point increase in \(\beta\) (i.e. \(\beta =0.05\)), and a 0.5-percentage-points increase in \(\gamma\) (i.e. \(\gamma =0.465\)), respectively.
Figure 5b shows that the dynamical system is locally stable in the baseline scenario. Small changes in the parameter values do not alter the stability properties of the system.
Appendix 5 - Local stability analysis
Let us define \({\theta }_{z}\equiv \left(1-\rho z\right){f}_{z}^{{L}{\prime}}\), \({\theta }_{\mu }\equiv \left(1+\rho {z}^{2}\right){f}_{\mu }^{{L}{\prime}}<0\), \({\Gamma }_{z}\equiv \left(1+\rho \right){f}_{z}^{{L}{\prime}}<0\). Remind that \({\Gamma }_{\mu }\equiv \left(1-\rho z\right){f}_{\mu }^{{L}{\prime}}\). \({\theta }_{z}>0\) and \({\Gamma }_{\mu }>0\) if, and only if, \(z>\overline{z }\).
We investigate the local stability of the equilibrium linearizing the system of differential Eqs. (22), (23), and (24) around the equilibrium values (\({a}_{K}^{*}\), \({z}^{*}\), \({e}^{*}\)):
where the elements of the Jacobian matrix \({\varvec{J}}\) evaluated at the steady-state values \({a}_{K}^{*}(\alpha ,\beta ,\gamma ,\tau ,s,n)\), \({z}^{*}(\alpha ,\beta ,\gamma ,\tau ,s,n)\), and \({e}^{*}(\alpha ,\beta ,\gamma ,\tau ,s,n)\) are given by:
Only partial derivatives (62), (63), (65), and (67) are unambiguously signed, whereas the signs of (61), (64) and (66) are crucially dependent on the level of wage inequality, on the effect of the high-skilled employment rate on the growth rate of the high-skilled nominal wage and the rates of high-skilled- and low-skilled-labour-saving innovations, and on the effect of wage inequality on capital accumulation and the rate of high-skilled-labour-saving techniques.
Equation (61) shows that an increase in wage inequality has a stabilizing effect on the dynamics of the output–capital ratio if and only if \(z>{z}^{*}\). Indeed, an increase in \(z\) has two opposite effects on the rate of change of the output–capital ratio: on the one hand, it stimulates the development of high-skilled-labour-saving techniques, thus exerting downward pressure on the output–capital ratio; on the other hand, it reduces the adoption of low-skilled-labour-saving innovations, thus putting upward pressure on the output–capital ratio. Since the first effect is non-linear and (in absolute value) increasing in \(z\) (Eq. 28), the first effect will offset the second one if wage inequality exceeds the critical value \(\overline{z }\).
Equation (64) shows that the effect of the high-skilled employment rate on the dynamics of wage inequality is mediated by its impact on the growth rate of the high-skilled workers’ nominal wage and on the rates of adoption of high-skilled- and low-skilled-labour-saving innovations. An increase in \(e\) raises the growth rate of the high-skilled workers’ nominal wage and, by reducing the profit share, stimulates both high-skilled- and low-skilled-labour-saving innovations. As the response of high-skilled labour productivity growth to profitability is non-linear and (in absolute value) increasing in \(z\) (Eq. 32), the overall effect of an increase in \(e\) is crucially dependent on the level of wage inequality: if \(z<{z}^{*}\), an increase in \(e\) always has a destabilizing effect on the dynamics of wage inequality; if \(z>{z}^{*}\), an increase in \(e\) has a stabilizing effect if and only if the stimulus to the development of high-skilled-labour-saving innovations offset the impact on the growth rates of high-skilled nominal wage and low-skilled labour productivity.
From Eqs. (62) and (63), we have that the effect of the high-skilled employment rate on the dynamics of the output–capital ratio and the effect of wage inequality on its rate of change act as stabilization factors of the equilibrium. An increase in \(e\) lowers the capital share in total costs, putting downward pressure on the output–capital ratio. A rise in \(z\) has negative feedback on itself, as it induces the development of high-skilled-labour-saving innovations at the expense of the low-skilled-labour-saving innovation, thus reducing wage inequality.
Equation (66) shows that an increase in wage inequality has a stabilizing effect on the dynamics of the high-skilled employment rate if \(z>{z}^{*}\) and high-skilled labour productivity growth is more responsive than capital accumulation to wage inequality.
The characteristic equation of the Jacobian matrix \({\varvec{J}}\) in (60) is given by:
where \(\lambda\) denotes a characteristic root. The coefficients of Eq. (68) are:
The necessary and sufficient condition for the local stability of the dynamic system is that all characteristic roots are negative or have a negative real part,Footnote 13 which occurs when:
Proposition 5
The equilibrium is locally stable if \(\left({g}_{z}{\prime}-{f}_{z}^{{H}{\prime}}\right)\left({h}_{e}{\prime}+{\Gamma }_{\mu }^{*}{\mu }_{e}{\prime}\right)<0\) and \({\theta }_{z}^{*}\left({h}_{e}{\prime}+{\Gamma }_{\mu }^{*}{\mu }_{e}{\prime}\right)<0\), and only if \({\theta }_{z}^{*}\left({h}_{e}{\prime}+{\Gamma }_{\mu }^{*}{\mu }_{e}{\prime}\right)>{\theta }_{\mu }^{*}{\Gamma }_{z}^{*}{\mu }_{e}{\prime}\). Then, if \({z}^{*}<\overline{z }\), local stability requires \({\theta }_{z}^{*}\left({h}_{e}{\prime}+{\Gamma }_{\mu }^{*}{\mu }_{e}{\prime}\right)>{\theta }_{\mu }^{*}{\Gamma }_{z}^{*}{\mu }_{e}{\prime}\), whereas \({g}_{z}{\prime}<{f}_{z}^{{H}{\prime}}\) is sufficient for the equilibrium to be locally stable; if \({z}^{*}>\overline{z }\), a sufficient condition for the local stability is \({g}_{z}{\prime}>{f}_{z}^{{H}{\prime}}\) and \({h}_{e}{\prime}+{\Gamma }_{\mu }^{*}{\mu }_{e}{\prime}<0\).
Proof
The condition \({a}_{1}>0\) is always satisfied. The condition \({a}_{3}>0\) is satisfied if and only if \({\theta }_{z}^{*}\left({h}_{e}{\prime}+{\Gamma }_{\mu }^{*}{\mu }_{e}{\prime}\right)>{\theta }_{\mu }^{*}{\Gamma }_{z}^{*}{\mu }_{e}{\prime}\). After rearranging:
If \({a}_{3}>0\), \(\left({g}_{z}{\prime}-{f}_{z}^{{H}{\prime}}\right)\left({h}_{e}{\prime}+{\Gamma }_{\mu }^{*}{\mu }_{e}{\prime}\right)<0\) is a sufficient condition for \({a}_{2}>0\). After some algebra, we have:
If \({a}_{2}>0\) and \({a}_{3}>0\), \({\theta }_{z}^{*}\left({h}_{e}{\prime}+{\Gamma }_{\mu }^{*}{\mu }_{e}{\prime}\right)<0\) is a sufficient condition for \({a}_{1}{a}_{2}-{a}_{3}>0\). We have thus proved the first part of Proposition 1.
If \({z}^{*}<\overline{z }\), then \({\theta }_{z}^{*}<0\) and \({h}_{e}{\prime}+{\Gamma }_{\mu }^{*}{\mu }_{e}{\prime}>0\). Therefore, \({g}_{z}{\prime}<{f}_{z}^{{H}{\prime}}\) is sufficient for the equilibrium to be locally stable. If \({z}^{*}>\overline{z }\), we always have \({\theta }_{z}^{*}\left({h}_{e}{\prime}+{\Gamma }_{\mu }^{*}{\mu }_{e}{\prime}\right)>{\theta }_{\mu }^{*}{\Gamma }_{z}^{*}{\mu }_{e}{\prime}\), since \({\theta }_{z}^{*}>0\) and \({\theta }_{z}^{*}{\Gamma }_{\mu }^{*}<{\theta }_{\mu }^{*}{\Gamma }_{z}^{*}\). Therefore, \({g}_{z}{\prime}>{f}_{z}^{{H}{\prime}}\) and \({h}_{e}{\prime}+{\Gamma }_{\mu }^{*}{\mu }_{e}{\prime}<0\) are a sufficient condition for the local stability. We have thus proved the second part of Proposition 1.
The necessary condition \({\theta }_{z}^{*}\left({h}_{e}{\prime}+{\Gamma }_{\mu }^{*}{\mu }_{e}{\prime}\right)>{\theta }_{\mu }^{*}{\Gamma }_{z}^{*}{\mu }_{e}{\prime}\), or equivalently \({\theta }_{z}^{*}{\phi }_{{\widehat{a}}_{L}}{\prime}\left({h}_{e}{\prime}+{\Gamma }_{\mu }^{*}{\mu }_{e}{\prime}\right)<{\theta }_{\mu }^{*}{\Gamma }_{z}^{*}{\phi }_{{\widehat{a}}_{L}}{\prime}{\mu }_{e}{\prime}\), prevents wage inequality \(z\) and employment \(e\) from causing an explosive growth of output–capital ratio and wage inequality. Indeed, the effect of employment on the growth of the output–capital ratio (Eq. 62) and the effect of wage inequality on its growth rate (Eq. 63) act as stabilizing forces of the equilibrium, whereas the effect of wage inequality on the growth of the output–capital ratio (Eq. 61) and the effect of employment on the growth of wage inequality (Eq. 64) are not unambiguously signed. The equilibrium will be locally stable only if the effect of the stabilizing forces offset the impact of the ambiguously signed effects – a condition which is always satisfied in the presence of a high level of wage inequality (i.e. if \({z}^{*}>\overline{z }\)).
The sufficient condition \(\left({g}_{z}{\prime}-{f}_{z}^{{H}{\prime}}\right)\left({h}_{e}{\prime}+{\Gamma }_{\mu }^{*}{\mu }_{e}{\prime}\right)<0\) and \({\theta }_{z}^{*}\left({h}_{e}{\prime}+{\Gamma }_{\mu }^{*}{\mu }_{e}{\prime}\right)<0\) implies that a system is locally stable in the presence of an equilibrium in the balance of power among social classes, in terms of dynamics of high-skilled employment and wage inequality (Eqs. (63), (64), and (66)). Indeed, the system is stable if an imbalance in favour of the high-skilled workers in the dynamics of wage inequality (i.e. \({h}_{e}{\prime}+{\Gamma }_{\mu }^{*}{\mu }_{e}{\prime}>0\)) is counteracted by a negative effect of wage inequality on the growth rate of employment (i.e. \({g}_{z}{\prime}-{f}_{z}^{{H}{\prime}}<0\)) and a low level of wage inequality (\({z}^{*}<\overline{z }\)), or alternatively, if an imbalance in favour of the high-skilled workers in the dynamics of employment (i.e. \({g}_{z}{\prime}-{f}_{z}^{{H}{\prime}}>0\)) and the level of wage inequality (\({z}^{*}>\overline{z }\)) is compensated by a negative response of the growth rate of wage inequality to employment (\({h}_{e}{\prime}+{\Gamma }_{\mu }^{*}{\mu }_{e}{\prime}<0\)).
Appendix 6
Totally differentiating Eqs. (25), (26), and (27) with respect to \(\alpha\) yields:
Using Eqs. (75), (76), and \(g={\widehat{a}}_{H}-n\), total differentiation of Eqs. (5) and (6), with (12), and (10), (12), (17), and (18) with respect to \(\alpha\) yields:
Appendix 7
Totally differentiating Eqs. (25), (26), and (27) with respect to \(\beta\) yields:
Using Eqs. (75), (76), and \(g={\widehat{a}}_{H}-n\), total differentiation of Eqs. (5) and (6), with (12), and (10), (12), (17), and (18) with respect to \(\beta\) yields:
Appendix 8
Totally differentiating Eqs. (25), (26), and (27) with respect to \(\gamma\) yields:
Using Eqs. (91), (92), and \(g={\widehat{a}}_{H}-n\), total differentiation of Eqs. (5) and (6), with (12), and (10), (12), (17), and (18) with respect to \(\gamma\) yields:
Rights and permissions
Springer Nature or its licensor (e.g. a society or other partner) holds exclusive rights to this article under a publishing agreement with the author(s) or other rightsholder(s); author self-archiving of the accepted manuscript version of this article is solely governed by the terms of such publishing agreement and applicable law.
About this article

Cite this article
Stamegna, M. Wage inequality and induced innovation in a classical-Marxian growth model. J Evol Econ 34, 127–168 (2024). https://doi.org/10.1007/s00191-024-00851-z
Accepted:
Published:
Issue Date:
DOI: https://doi.org/10.1007/s00191-024-00851-z