
Abstract
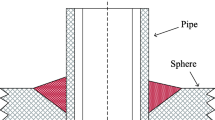
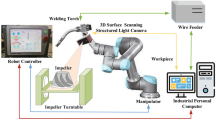
Our paper mainly introduces a novel path planning method for non-ideal sphere-pipe intersecting curve robot welding based on laser scanning. This method integrates the generation of laser scanning trajectory, the processing of scanning data, and the path planning of non-ideal sphere-pipe joint welding. First, the paper perfects the ideal sphere-pipe intersection model and represents the parametric equation of ideal intersecting curve, which can cover all the intersection ways for sphere-pipe joints. Since the spheres and pipes applied in actual production are not standard, this paper adopts the scheme of scanning and identifying weld seam using the laser displacement sensor and gives the laser sensor scanning trajectory by analyzing the direction and attitude of space welds. In this paper, by sampling and filtering the distance data obtained from laser sensor, a novel weld point identification algorithm suitable for the above scanning trajectory is proposed. In response to the constantly changing of sphere-pipe joints’ weld inclination and attitude, this paper adopts the robot-positioner welding scheme and introduces a novel algorithm for solving the position of two external axes. The ADAMS simulation experiments prove that this scheme can effectively avoid the adverse effects of the uphill and downhill welding on the welding quality.























Similar content being viewed by others

References
Luo M, Fang J, Zhao J (2015) The development and the application of the industrial robot technology. Mach Building Autom 1(4):66–74
Li Z, Li G, Sun Y (2017) Development of articulated robot trajectory planning. Int J Comput Sci Math 8(1):52–60
Kucuk S (2017) Optimal trajectory generation algorithm for serial and parallel manipulators. Robot Comput Integr Manuf 48:219–232
Barraquand J, Kavraki L, Latombe JC, Motwani R, Li TY, Raghavan P (1997) A random sampling scheme for path planning. Int J Robot Res 16(6):759–774
Yan SJ, Ong SK, Nee AYC (2016) Optimal pass planning for robotic welding of large-dimension joints with deep grooves. Procedia CIRP 56:188–192
Fang HC, Ong SK, Nee AYC (2017) Robot path planning optimization for welding complex joints. Int J Adv Manuf Technol 90:3829–3839
Fang HC, Ong SK, Nee AYC (2017) Adaptive pass planning and optimization for robotic welding of complex joints. Adv Manuf 5(2):93–104
Deepak B, Rao CA, Raju B (2016) Weld seam tracking and simulation of 3-axis robotic arm for performing welding operation in CAD environment. CAD/CAM, robotics and factories of the future. Springer, New Delhi, pp 405–415
Kiddee P, Fang Z, Tan M (2016) An automated weld seam tracking system for thick plate using cross mark structured light. Int J Adv Manuf Technol 87(9–12):3589–3603
Mahajan A, Figueroa F (1997) Intelligent seam tracking using ultrasonic sensors for robotic welding. Robotica 15(3):275–281
Fridenfalk M, Bolmsjö G (2004) Design and validation of a universal 6D seam-tracking system in robotic welding using arc sensing. Adv Robot 18(1):1–21
Fan J, Jing F, Fang Z, Tan M (2017) Automatic recognition system of welding seam type based on SVM method. Int J Adv Manuf Technol 92(1–4):989–999
Xu Y, Lv N, Fang G, Du S, Zhao W, Ye Z, Chen S (2017) Welding seam tracking in robotic gas metal arc welding. J Mater Process Technol 248:18–30
Chen HB, Huang HY, Lin T, Zhang HJ, Chen SB (2013) Situation and development of intelligentized technology for arc welding robot. Electirc Welding Machine 43(4):8–15
Huo L, Baron L (2008) The joint-limits and singularity avoidance in robotic welding. Ind Robot: Int J 35(5):456–464
Mitsi S, Bouzakis KD, Mansour G, Sagris D, Maliaris G (2005) Off-line programming of an industrial robot for manufacturing. Int J Adv Manuf Technol 26(3):262–267
Liu J, Shengsun H, Junqi S, Yukun T, Changliang C (2017) Intersection seam of sphere and tube welding robot trajectory optimization based on spatial offset curve. Trans China Weld Instit 38(11):47–50
Jie Z, Shengsun H, Junqi S, Changliang C, Wei D (2011) Mathematical model based on MATLAB for intersection seam of sphere and tube. Trans China Weld Instit 32(8):89–92
Chen C, Hu S, He D, Shen J (2013) An approach to the path planning of tube-sphere intersection welds with the robot dedicated to J-groove joints. Robot Comput Integr Manuf 29(4):41–48
Craig JJ (2003) Introduction to robotics: mechanics and control, 3rd edn. Prentice Hall, London
Hongzhu G, Jinggeng W, Ruonan F (2007) Space analytic geometry. Beijing Normal University Press, Beijing
Yu J, Chen B, Yu H, Lin C, Zhao L (2018) Neural networks-based command filtering control of nonlinear systems with uncertain disturbance. Inf Sci 426:50–60
Liu H, Liu Q, Sun P, Liu Q, Yuan S (2017) A polynomial equation-based interpolation method of NURBS tool path with minimal feed fluctuation for high-quality machining. Int J Adv Manuf Technol 90(9–12):2751–2759
Liu X, Ahmad F, Yamazaki K, Mori M (2005) Adaptive interpolation scheme for NURBS curves with the integration of machining dynamics. Int J Mach Tools Manuf 45(4–5):433–444
Liu Y, Shi L, Tian XC (2018) Weld seam fitting and welding torch trajectory planning based on NURBS in intersecting curve welding. Int J Adv Manuf Technol 95(5–8):2457–2471
Funding
The authors gratefully thank the research funding by the National Key Research and Development Plan of China under Grant No. 2017YFB13035.
Author information
Authors and Affiliations
Corresponding author
Additional information
Publisher’s note
Springer Nature remains neutral with regard to jurisdictional claims in published maps and institutional affiliations.
Rights and permissions
About this article

Cite this article
Liu, Y., Tian, X. Robot path planning with two-axis positioner for non-ideal sphere-pipe joint welding based on laser scanning. Int J Adv Manuf Technol 105, 1295–1310 (2019). https://doi.org/10.1007/s00170-019-04344-3
Received:
Accepted:
Published:
Issue Date:
DOI: https://doi.org/10.1007/s00170-019-04344-3