
Abstract
Multiobjective reliability-based design optimization (RBDO) is a research area, which has not been investigated in the literatures comparing with single-objective RBDO. This work conducts an exhaustive study of fifteen new and popular metaheuristic multiobjective RBDO algorithms, including non-dominated sorting genetic algorithm II, differential evolution for multiobjective optimization, multiobjective evolutionary algorithm based on decomposition, multiobjective particle swarm optimization, multiobjective flower pollination algorithm, multiobjective bat algorithm, multiobjective gray wolf optimizer, multiobjective multiverse optimization, multiobjective water cycle optimizer, success history-based adaptive multiobjective differential evolution, success history-based adaptive multiobjective differential evolution with whale optimization, multiobjective salp swarm algorithm, real-code population-based incremental learning and differential evolution, unrestricted population size evolutionary multiobjective optimization algorithm, and multiobjective jellyfish search optimizer. In addition, the adaptive chaos control method is employed for the above-mentioned algorithms to estimate the probabilistic constraints effectively. This comparative analysis reveals the critical technologies and enormous challenges in the RBDO field. It also offers new insight into simultaneously dealing with the multiple conflicting design objectives and probabilistic constraints. Also, this study presents the advantage and future development trends or incurs the increased challenge of researchers to put forward an effective multiobjective RBDO algorithm that assists the complex engineering system design.



Similar content being viewed by others


References
Acar E, Bayrak G, Jung Y, Lee I, Ramu P, Ravichandran SS (2021) Modeling, analysis, and optimization under uncertainties: a review. Struct Multidisc Optim 64:2909–2945. https://doi.org/10.1007/s00158-021-03026-7
Aittokoski T, Miettinen K (2010) Efficient evolutionary approach to approximate the Pareto-optimal set in multiobjective optimization, UPS-EMOA. Optim Methods Softw 25:841–858. https://doi.org/10.1080/10556780903548265
Akbari R, Hedayatzadeh R, Ziarati K, Hassanizadeh B (2012) A multi-objective artificial bee colony algorithm. Swarm Evol Comput 2:39–52. https://doi.org/10.1016/j.swevo.2011.08.001
Aoues Y, Chateauneuf A (2010) Benchmark study of numerical methods for reliability-based design optimization. Struct Multidisc Optim 41:277–294. https://doi.org/10.1007/s00158-009-0412-2
Bader J, Zitzler E (2011) HypE: an algorithm for fast hypervolume-based many-objective optimization. Evol Comput 19:45–76. https://doi.org/10.1162/EVCO_a_00009
Balaji K, Siva Kumar M, Yuvaraj N (2021) Multi objective taguchi–grey relational analysis and krill herd algorithm approaches to investigate the parametric optimization in abrasive water jet drilling of stainless steel. Appl Soft Comput 102:107075. https://doi.org/10.1016/j.asoc.2020.107075
Bandyopadhyay S, Saha S, Maulik U, Deb K (2008) A simulated annealing-based multiobjective optimization algorithm: AMOSA. IEEE Trans Evol Comput 12:269–283. https://doi.org/10.1109/TEVC.2007.900837
Barakat S, Bani-Hani K, Taha MQ (2004) Multi-objective reliability-based optimization of prestressed concrete beams. Struct Saf 26:311–342. https://doi.org/10.1016/j.strusafe.2003.09.001
Beck AT, Rodrigues da Silva LA, Miguel LFF (2023) The latent failure probability: a conceptual basis for robust, reliability-based and risk-based design optimization. Reliab Eng Syst Saf 233:109127. https://doi.org/10.1016/j.ress.2023.109127
Biswas R, Sharma D (2021) A single-loop shifting vector method with conjugate gradient search for reliability-based design optimization. Eng Optim 53:1044–1063. https://doi.org/10.1080/0305215X.2020.1770745
Biswas R, Sharma D (2023) Chaos control assisted single-loop multi-objective reliability-based design optimization using differential evolution. Swarm Evolut Comput 81:101340. https://doi.org/10.1016/j.swevo.2023.101340
Cakir B, Altiparmak F, Dengiz B (2011) Multi-objective optimization of a stochastic assembly line balancing: a hybrid simulated annealing algorithm. Comput Ind Eng 60:376–384. https://doi.org/10.1016/j.cie.2010.08.013
Chakri A, Yang XS, Khelif R, Benouaret M (2018) Reliability-based design optimization using the directional bat algorithm. Neural Comput Appl 30:2381–2402. https://doi.org/10.1007/s00521-016-2797-3
Chen ZZ, Qiu HB, Gao L, Su L, Li PG (2013) An adaptive decoupling approach for reliability-based design optimization. Comput Struct 117:58–66. https://doi.org/10.1016/j.compstruc.2012.12.001
Chen CT, Chen MH, Horng WT (2014) A cell evolution method for reliability-based design optimization. Appl Soft Comput 15:67–79. https://doi.org/10.1016/j.asoc.2013.10.020
Chen ZZ, Li XK, Chen G, Gao L, Qiu HB, Wang SZ (2018) A probabilistic feasible region approach for reliability-based design optimization. Struct Multidisc Optim 57:359–372. https://doi.org/10.1007/s00158-017-1759-4
Cheng G, Xu L, Jiang L (2006) A sequential approximate programming strategy for reliability-based structural optimization. Comput Struct 84:1353–1367. https://doi.org/10.1016/j.compstruc.2006.03.006
Cheng J, Yen GG, Zhang G (2016a) A grid-based adaptive multi-objective differential evolution algorithm. Inf Sci 367–368:890–908. https://doi.org/10.1016/j.ins.2016.07.009
Cheng R, Jin Y, Olhofer M, Sendhoff B (2016b) A reference vector guided evolutionary algorithm for many-objective optimization. IEEE Trans Evol Comput 20:773–791. https://doi.org/10.1109/TEVC.2016.2519378
Cheng GH, Gary Wang G, Hwang YM (2021) Multi-objective optimization for high-dimensional expensively constrained black-box problems. J Mech Des. https://doi.org/10.1115/1.4050749
Chiandussi G, Codegone M, Ferrero S, Varesio FE (2012) Comparison of multi-objective optimization methodologies for engineering applications. Comput Math Appl 63:912–942. https://doi.org/10.1016/j.camwa.2011.11.057
Cho T, Lee B (2010) Reliability-based design optimization using convex approximations and sequential optimization and reliability assessment method. J Mech Sci Technol 24:279–283. https://doi.org/10.1007/s12206-009-1143-4
Cho TM, Lee BC (2011) Reliability-based design optimization using convex linearization and sequential optimization and reliability assessment method. Struct Saf 33:42–50. https://doi.org/10.1016/j.strusafe.2010.05.003
Chou JS, Truong DN (2020) Multiobjective optimization inspired by behavior of jellyfish for solving structural design problems. Chaos Solitons Fractals 135:109738. https://doi.org/10.1016/j.chaos.2020.109738
Coelho RF (2015) Probabilistic dominance in multiobjective reliability-based optimization: theory and implementation. IEEE Trans Evol Comput 19:214–224. https://doi.org/10.1109/tevc.2014.2312208
Coelho RF, Bouillard P (2011) Multi-objective reliability-based optimization with stochastic metamodels. Evol Comput 19:525–560. https://doi.org/10.1162/EVCO_a_00034
Coello CAC, Lechuga MS (2002) MOPSO: a proposal for multiple objective particle swarm optimization. In: Proceedings of the 2002 Congress on Evolutionary Computation. CEC’02 (Cat. No.02TH8600). IEEE, Honolulu, HI, USA, pp 1051–1056. https://doi.org/10.1109/CEC.2002.1004388
Dai H, Zhang H, Wang W (2016) A new maximum entropy-based importance sampling for reliability analysis. Struct Saf 63:71–80. https://doi.org/10.1016/j.strusafe.2016.08.001
Dammak K, El Hami A (2020) Multi-objective reliability based design optimization using Kriging surrogate model for cementless hip prosthesis. Comput Methods Biomech Biomed Eng 23:854–867. https://doi.org/10.1080/10255842.2020.1768247
das Neves Carneiro G, António CC (2017) A RBRDO approach based on structural robustness and imposed reliability level. Struct Multidisc Optim 57:2411–2429. https://doi.org/10.1007/s00158-017-1870-6
das Neves Carneiro G, Conceição António C (2019) Global optimal reliability index of implicit composite laminate structures by evolutionary algorithms. Struct Saf 79:54–65. https://doi.org/10.1016/j.strusafe.2019.03.001
Deb K, Pratap A, Agarwal S, Meyarivan T (2002) A fast and elitist multiobjective genetic algorithm: NSGA-II. IEEE Trans Evol Comput 6:182–197. https://doi.org/10.1109/4235.996017
Deb K, Gupta S, Daum D, Branke J, Mall AK, Padmanabhan D (2009) Reliability-based optimization using evolutionary algorithms. IEEE Trans Evol Comput 13:1054–1074. https://doi.org/10.1109/tevc.2009.2014361
Debich B, Yaich A, Dammak K, El Hami A, Gafsi W, Walha L, Haddar M (2021) Integration of multi-objective reliability-based design optimization into thermal energy management: application on phase change material-based heat sinks. J Energy Storage 41:102906. https://doi.org/10.1016/j.est.2021.102906
Dhiman G, Kumar V (2018) Multi-objective spotted hyena optimizer: a multi-objective optimization algorithm for engineering problems. Knowl Based Syst 150:175–197. https://doi.org/10.1016/j.knosys.2018.03.011
Dhiman G, Singh KK, Soni M, Nagar A, Dehghani M, Slowik A, Kaur A, Sharma A, Houssein EH, Cengiz K (2021) MOSOA: a new multi-objective seagull optimization algorithm. Expert Syst Appl 167:114150. https://doi.org/10.1016/j.eswa.2020.114150
Du X, Chen W (2004) Sequential optimization and reliability assessment method for efficient probabilistic design. J Mech Des 126:225–233. https://doi.org/10.1115/1.1649968
Du W, Luo Y, Wang Y (2018) A hybrid directional step method for minimum performance target point search. Appl Math Model 62:103–118. https://doi.org/10.1016/j.apm.2018.05.029
Duan L, Li G, Cheng A, Sun G, Song K (2017) Multi-objective system reliability-based optimization method for design of a fully parametric concept car body. Eng Optim 49:1247–1263. https://doi.org/10.1080/0305215X.2016.1241780
Duan L, Jiang H, Cheng A, Xue H, Geng G (2019) Multi-objective reliability-based design optimization for the VRB-VCS FLB under front-impact collision. Struct Multidisc Optim 59:1835–1851. https://doi.org/10.1007/s00158-018-2142-9
Echard B, Gayton N, Lemaire M (2011) AK-MCS: an active learning reliability method combining Kriging and Monte Carlo Simulation. Struct Saf 33:145–154. https://doi.org/10.1016/j.strusafe.2011.01.002
Ehre M, Papaioannou I, Willcox KE, Straub D (2021) Conditional reliability analysis in high dimensions based on controlled mixture importance sampling and information reuse. Comput Methods Appl Mech Eng 381:113826. https://doi.org/10.1016/j.cma.2021.113826
Enayatifar R, Yousefi M, Abdullah AH, Darus AN (2013) MOICA: A novel multi-objective approach based on imperialist competitive algorithm. Appl Math Comput 219:8829–8841. https://doi.org/10.1016/j.amc.2013.03.099
Ezzati G, Mammadov M, Kulkarni S (2015) A new reliability analysis method based on the conjugate gradient direction. Struct Multidisc Optim 51:89–98. https://doi.org/10.1007/s00158-014-1113-z
Fang J, Gao Y, Sun G, Li Q (2013) Multiobjective reliability-based optimization for design of a vehicledoor. Finite Elem Anal Des 67:13–21. https://doi.org/10.1016/j.finel.2012.11.007
Filomeno Coelho R (2013) Co-evolutionary optimization for multi-objective design under uncertainty. J Mech Des 135:021006–021006. https://doi.org/10.1115/1.4023184
Fleming PJ, Purshouse RC, Lygoe RJ (2005) Many-objective optimization: an engineering design perspective. In: Coello Coello CA, Hernández Aguirre A, Zitzler E (eds) Evolutionary multi-criterion optimization. Springer, Berlin Heidelberg, pp 14–32
Garg H (2015) An efficient biogeography based optimization algorithm for solving reliability optimization problems. Swarm Evol Comput 24:1–10. https://doi.org/10.1016/j.swevo.2015.05.001
Georgioudakis M, Lagaros ND, Papadrakakis M (2017) Probabilistic shape design optimization of structural components under fatigue. Comput Struct 182:252–266. https://doi.org/10.1016/j.compstruc.2016.12.008
Ghalehnovi M, Rashki M, Ameryan A (2020) First order control variates algorithm for reliability analysis of engineering structures. Appl Math Model 77:829–847. https://doi.org/10.1016/j.apm.2019.07.049
Gholaminezhad I, Jamali A, Assimi H (2017) Multi-objective reliability-based robust design optimization of robot gripper mechanism with probabilistically uncertain parameters. Neural Comput Appl 28:659–670. https://doi.org/10.1007/s00521-016-2392-7
Goh CK, Tan KC, Liu DS, Chiam SC (2010) A competitive and cooperative co-evolutionary approach to multi-objective particle swarm optimization algorithm design. Eur J Oper Res 202:42–54. https://doi.org/10.1016/j.ejor.2009.05.005
Gong W, Cai Z, Zhu L (2009) An efficient multiobjective differential evolution algorithm for engineering design. Struct Multidisc Optim 38:137–157. https://doi.org/10.1007/s00158-008-0269-9
Got A, Moussaoui A, Zouache D (2020) A guided population archive whale optimization algorithm for solving multiobjective optimization problems. Expert Syst Appl 141:112972. https://doi.org/10.1016/j.eswa.2019.112972
Got A, Zouache D, Moussaoui A (2022) MOMRFO: multi-objective Manta ray foraging optimizer for handling engineering design problems. Knowl-Based Syst 237:107880. https://doi.org/10.1016/j.knosys.2021.107880
Hamzehkolaei NS, Miri M, Rashki M (2018) New simulation-based frameworks for multi-objective reliability-based design optimization of structures. Appl Math Model 62:1–20. https://doi.org/10.1016/j.apm.2018.05.015
Hao P, Ma R, Wang YT, Feng SW, Wang B, Li G, Xing HZ, Yang F (2019) An augmented step size adjustment method for the performance measure approach: toward general structural reliability-based design optimization. Struct Saf 80:32–45. https://doi.org/10.1016/j.strusafe.2019.04.001
Hassanzadeh HR, Rouhani M (2010) A multi-objective gravitational search algorithm. In: 2010 2nd International conference on computational intelligence, communication systems and networks, 28–30 July 2010, pp 7–12. https://doi.org/10.1109/CICSyN.2010.32
Ho-Huu V, Duong-Gia D, Vo-Duy T, Le-Duc T, Nguyen-Thoi T (2018) An efficient combination of multi-objective evolutionary optimization and reliability analysis for reliability-based design optimization of truss structures. Expert Syst Appl 102:262–272. https://doi.org/10.1016/j.eswa.2018.02.040
Houssein EH, Mahdy MA, Shebl D, Manzoor A, Sarkar R, Mohamed WM (2022) An efficient slime mould algorithm for solving multi-objective optimization problems. Expert Syst Appl 187:115870. https://doi.org/10.1016/j.eswa.2021.115870
Hu Z, Du XP (2015) First order reliability method for time-variant problems using series expansions. Struct Multidisc Optim 51:1–21. https://doi.org/10.1007/s00158-014-1132-9
Hu W, Yen GG (2015) Adaptive multiobjective particle swarm optimization based on parallel cell coordinate system. IEEE Trans Evol Comput 19:1–18. https://doi.org/10.1109/TEVC.2013.2296151
Hu Z, Mansour R, Olsson M, Du XP (2021) Second-order reliability methods: a review and comparative study. Struct Multidisc Optim 64:3233–3263. https://doi.org/10.1007/s00158-021-03013-y
Huang HZ, Gu YK, Du X (2006) An interactive fuzzy multi-objective optimization method for engineering design. Eng Appl Artif Intell 19:451–460. https://doi.org/10.1016/j.engappai.2005.12.001
Hurtado JE (2007) Filtered importance sampling with support vector margin: a powerful method for structural reliability analysis. Struct Saf 29:2–15. https://doi.org/10.1016/j.strusafe.2005.12.002
Ishibuchi H, Masuda H, Tanigaki Y, Nojima Y (2015) Modified distance calculation in generational distance and inverted generational distance. In: Gaspar-Cunha A, Henggeler Antunes C, Coello CC (eds) Evolutionary multi-criterion optimization. Springer International Publishing, Cham, pp 110–125
Jafari-Asl J, Ben Seghier MEA, Ohadi S, van Gelder P (2021) Efficient method using Whale Optimization Algorithm for reliability-based design optimization of labyrinth spillway. Appl Soft Comput 101:107036. https://doi.org/10.1016/j.asoc.2020.107036
Jeong SB, Park GJ (2017) Single loop single vector approach using the conjugate gradient in reliability based design optimization. Struct Multidisc Optim 55:1329–1344. https://doi.org/10.1007/s00158-016-1580-5
Jiang C, Qiu H, Li X, Chen Z, Gao L, Li P (2019) Iterative reliable design space approach for efficient reliability-based design optimization. Eng Comput 36:151–169. https://doi.org/10.1007/s00366-018-00691-z
Jiang C, Qiu H, Gao L, Wang D, Yang Z, Chen L (2020) Real-time estimation error-guided active learning Kriging method for time-dependent reliability analysis. Appl Math Model 77:82–98. https://doi.org/10.1016/j.apm.2019.06.035
Jung Y, Cho H, Lee I (2020) Intelligent initial point selection for MPP search in reliability-based design optimization. Struct Multidisc Optim 62:1809–1820. https://doi.org/10.1007/s00158-020-02577-5
Kahloul S, Zouache D, Brahmi B, Got A (2022) A multi-external archive-guided Henry Gas Solubility Optimization algorithm for solving multi-objective optimization problems. Eng Appl Artif Intell 109:104588. https://doi.org/10.1016/j.engappai.2021.104588
Kannan BK, Kramer SN (1994) An augmented lagrange multiplier based method for mixed integer discrete continuous optimization and its applications to mechanical design. J Mech Des 116:405–411. https://doi.org/10.1115/1.2919393
Kaur H, Rai A, Bhatia SS, Dhiman G (2020) MOEPO: A novel Multi-objective Emperor Penguin Optimizer for global optimization: special application in ranking of cloud service providers. Eng Appl Artif Intell 96:104008. https://doi.org/10.1016/j.engappai.2020.104008
Kaveh A, Mahdavi V (2014) Colliding bodies optimization: a novel meta-heuristic method. Comput Struct 139:18–27. https://doi.org/10.1016/j.compstruc.2014.04.005
Kaveh A, Zaerreza A (2022) A new framework for reliability-based design optimization using metaheuristic algorithms. Structures 38:1210–1225. https://doi.org/10.1016/j.istruc.2022.02.069
Keshtegar B, Chakraborty S (2018) Dynamical accelerated performance measure approach for efficient reliability-based design optimization with highly nonlinear probabilistic constraints. Reliab Eng Syst Saf 178:69–83. https://doi.org/10.1016/j.ress.2018.05.015
Keshtegar B, Meng D, Ben Seghier MEA, Xiao M, Trung NT, Bui DT (2021) A hybrid sufficient performance measure approach to improve robustness and efficiency of reliability-based design optimization. Eng Comput 37:1695–1708. https://doi.org/10.1007/s00366-019-00907-w
Knowles J, Corne D (2002) On metrics for comparing nondominated sets. In: Proceedings of the 2002 congress on evolutionary computation. CEC’02 (Cat. No.02TH8600). IEEE, Honolulu, pp 711–716. https://doi.org/10.1109/CEC.2002.1007013
Kumar A, Wu G, Ali MZ, Luo Q, Mallipeddi R, Suganthan PN, Das S (2021a) A benchmark-Suite of real-World constrained multi-objective optimization problems and some baseline results. Swarm Evol Comput 67:100961. https://doi.org/10.1016/j.swevo.2021.100961
Kumar S, Jangir P, Tejani GG, Premkumar M, Alhelou HH (2021b) MOPGO: a new physics-based multi-objective plasma generation optimizer for solving structural optimization problems. IEEE Access 9:84982–85016. https://doi.org/10.1109/ACCESS.2021.3087739
Kumar S, Tejani GG, Pholdee N, Bureerat S (2021c) Multi-objective passing vehicle search algorithm for structure optimization. Expert Syst Appl 169:114511. https://doi.org/10.1016/j.eswa.2020.114511
Lee JO, Yang YS, Ruy WS (2002) A comparative study on reliability-index and target-performance-based probabilistic structural design optimization. Comput Struct 80:257–269. https://doi.org/10.1016/S0045-7949(02)00006-8
Li HS, Cao ZJ (2016) Matlab codes of Subset Simulation for reliability analysis and structural optimization. Struct Multidisc Optim 54:391–410. https://doi.org/10.1007/s00158-016-1414-5
Li G, Meng Z, Hu H (2015) An adaptive hybrid approach for reliability-based design optimization. Struct Multidisc Optim 51:1051–1065. https://doi.org/10.1007/s00158-014-1195-7
Li YF, Wang Y, Ma R, Hao P (2019) Improved reliability-based design optimization of non-uniformly stiffened spherical dome. Struct Multidisc Optim 60:375–392. https://doi.org/10.1007/s00158-019-02213-x
Li S, Chen H, Wang M, Heidari AA, Mirjalili S (2020) Slime mould algorithm: a new method for stochastic optimization. Future Gener Comput Syst 111:300–323. https://doi.org/10.1016/j.future.2020.03.055
Li LL, Ren XY, Tseng ML, Wu DS, Lim MK (2022a) Performance evaluation of solar hybrid combined cooling, heating and power systems: a multi-objective arithmetic optimization algorithm. Energy Convers Manag 258:115541. https://doi.org/10.1016/j.enconman.2022.115541
Li X, Chen G, Wang Y, Yang D (2022b) A unified approach for time-invariant and time-variant reliability-based design optimization with multiple most probable points. Mech Syst Signal Process 177:109176. https://doi.org/10.1016/j.ymssp.2022.109176
Liang J, Mourelatos ZP, Nikolaidis E (2007) A single-loop approach for system reliability-based design optimization. J Mech Des 129:1215–1224. https://doi.org/10.1115/1.2779884
Liang J, Mourelatos ZP, Tu J (2008) A single-loop method for reliability-based design optimisation. Int J Prod Dev 5:76–92. https://doi.org/10.1504/ijpd.2008.016371
Lim J, Jang YS, Chang HS, Park JC, Lee J (2020) Multi-objective genetic algorithm in reliability-based design optimization with sequential statistical modeling: an application to design of engine mounting. Struct Multidisc Optim 61:1253–1271. https://doi.org/10.1007/s00158-019-02409-1
Limbourg P, Kochs HD (2008) Multi-objective optimization of generalized reliability design problems using feature models—a concept for early design stages. Reliab Eng Syst Saf 93:815–828. https://doi.org/10.1016/j.ress.2007.03.032
Liu X, Fu Q, Ye N, Yin L (2019) The multi-objective reliability-based design optimization for structure based on probability and ellipsoidal convex hybrid model. Struct Saf 77:48–56. https://doi.org/10.1016/j.strusafe.2018.11.004
Liu Q, Dai Y, Wu X, Han X, Ouyang H, Li Z (2021) A non-probabilistic uncertainty analysis method based on ellipsoid possibility model and its applications in multi-field coupling systems. Comput Methods Appl Mech Eng 385:114051. https://doi.org/10.1016/j.cma.2021.114051
Lobato FS, Goncalves MS, Jahn B, Ap Cavalini A, Steffen V (2017) Reliability-based optimization using differential evolution and inverse reliability analysis for engineering system design. J Optim Theory Appl 174:894–926. https://doi.org/10.1007/s10957-017-1063-x
Lobato FS, da Silva MA, Cavalini AA Jr, Steffen V Jr (2019) Reliability-based robust multi-objective optimization applied to engineering system design. Eng Optim 52:1–21. https://doi.org/10.1080/0305215x.2019.1577413
Marichelvam MK, Prabaharan T, Yang XS (2014) A discrete firefly algorithm for the multi-objective hybrid flowshop scheduling problems. IEEE Trans Evol Comput 18:301–305. https://doi.org/10.1109/TEVC.2013.2240304
Marler RT, Arora JS (2004) Survey of multi-objective optimization methods for engineering. Struct Multidisc Optim 26:369–395. https://doi.org/10.1007/s00158-003-0368-6
Melchers RE, Ahammed M, Middleton C (2003) FORM for discontinuous and truncated probability density functions. Struct Saf 25:305–313. https://doi.org/10.1016/S0167-4730(03)00002-X
Meng Z, Keshtegar B (2019) Adaptive conjugate single-loop method for efficient reliability-based design and topology optimization. Comput Methods Appl Mech Eng 344:95–119. https://doi.org/10.1016/j.cma.2018.10.009
Meng Z, Li G, Wang BP, Hao P (2015) A hybrid chaos control approach of the performance measure functions for reliability-based design optimization. Comput Struct 146:32–43. https://doi.org/10.1016/j.compstruc.2014.08.011
Meng Z, Li G, Yang D, Zhan L (2017) A new directional stability transformation method of chaos control for first order reliability analysis. Struct Multidisc Optim 55:601–612. https://doi.org/10.1007/s00158-016-1525-z
Meng Z, Zhang ZH, Zhang DQ, Yang DX (2019) An active learning method combining Kriging and accelerated chaotic single loop approach (AK-ACSLA) for reliability-based design optimization. Comput Methods Appl Mech Eng 357:112570. https://doi.org/10.1016/j.cma.2019.112570
Meng Z, Li G, Wang X, Sait SM, Yıldız AR (2021) A comparative study of metaheuristic algorithms for reliability-based design optimization problems. Arch Comput Methods Eng 28:1853–1869. https://doi.org/10.1007/s11831-020-09443-z
Meng Z, Rıza Yıldız A, Mirjalili S (2022) Efficient decoupling-assisted evolutionary/metaheuristic framework for expensive reliability-based design optimization problems. Expert Syst Appl 205:117640. https://doi.org/10.1016/j.eswa.2022.117640
Mirjalili S, Lewis A (2016) The whale optimization algorithm. Adv Eng Softw 95:51–67. https://doi.org/10.1016/j.advengsoft.2016.01.008
Mirjalili S, Mirjalili SM, Lewis A (2014) Grey wolf optimizer. Adv Eng Softw 69:46–61. https://doi.org/10.1016/j.advengsoft.2013.12.007
Mirjalili S, Saremi S, Mirjalili SM, Coelho LdS (2016) Multi-objective grey wolf optimizer: a novel algorithm for multi-criterion optimization. Expert Syst Appl 47:106–119. https://doi.org/10.1016/j.eswa.2015.10.039
Mirjalili S, Gandomi AH, Mirjalili SZ, Saremi S, Faris H, Mirjalili SM (2017a) Salp Swarm algorithm: a bio-inspired optimizer for engineering design problems. Adv Eng Softw 114:163–191. https://doi.org/10.1016/j.advengsoft.2017.07.002
Mirjalili S, Jangir P, Mirjalili SZ, Saremi S, Trivedi IN (2017b) Optimization of problems with multiple objectives using the multi-verse optimization algorithm. Knowl-Based Syst 134:50–71. https://doi.org/10.1016/j.knosys.2017.07.018
Mirjalili S, Jangir P, Saremi S (2017c) Multi-objective ant lion optimizer: a multi-objective optimization algorithm for solving engineering problems. Appl Intell 46:79–95. https://doi.org/10.1007/s10489-016-0825-8
Mirjalili SZ, Mirjalili S, Saremi S, Faris H, Aljarah I (2018) Grasshopper optimization algorithm for multi-objective optimization problems. Appl Intell 48:805–820. https://doi.org/10.1007/s10489-017-1019-8
Mun J, Lim J, Kwak Y, Kang B, Choi KK, Kim DH (2021) Reliability-based design optimization of a permanent magnet motor under manufacturing tolerance and temperature fluctuation. IEEE Trans Magn 57:1–4. https://doi.org/10.1109/TMAG.2021.3063161
Ohadi S, Jafari-Asl J (2021) Multi-objective reliability-based optimization for design of trapezoidal labyrinth weirs. Flow Meas Instrum 77:101787. https://doi.org/10.1016/j.flowmeasinst.2020.101787
Okoro A, Khan F, Ahmed S (2023) Dependency effect on the reliability-based design optimization of complex offshore structure. Reliabil Eng Syst Saf 231:109026. https://doi.org/10.1016/j.ress.2022.109026
Panagant N, Bureerat S, Tai K (2019) A novel self-adaptive hybrid multi-objective meta-heuristic for reliability design of trusses with simultaneous topology, shape and sizing optimisation design variables. Struct Multidisc Optim 60:1937–1955. https://doi.org/10.1007/s00158-019-02302-x
Panagant N, Pholdee N, Bureerat S, Yildiz AR, Mirjalili S (2021) A comparative study of recent multi-objective metaheuristics for solving constrained truss optimisation problems. Arch Comput Methods Eng 28:4031–4047. https://doi.org/10.1007/s11831-021-09531-8
Papadrakakis M, Lagaros ND (2002) Reliability-based structural optimization using neural networks and Monte Carlo simulation. Comput Methods Appl Mech Eng 191:3491–3507. https://doi.org/10.1016/S0045-7825(02)00287-6
Papadrakakis M, Lagaros ND, Plevris V (2005) Design optimization of steel structures considering uncertainties. Eng Struct 27:1408–1418. https://doi.org/10.1016/j.engstruct.2005.04.002
Park J, Lee I (2022) A new framework for efficient sequential sampling-based RBDO using space mapping. J Mech Des. https://doi.org/10.1115/1.4055547
Pereira JLJ, Francisco MB, Diniz CA, Antônio Oliver G, Cunha SS, Gomes GF (2021) Lichtenberg algorithm: a novel hybrid physics-based meta-heuristic for global optimization. Expert Syst Appl 170:114522. https://doi.org/10.1016/j.eswa.2020.114522
Petrone G, Axerio-Cilies J, Quagliarella D, Iaccarino G (2013) A probabilistic non-dominated sorting GA for optimization under uncertainty. Eng Comput 30:1054–1085. https://doi.org/10.1108/EC-05-2012-0110
Pholdee N, Bureerat S (2013) Hybridisation of real-code population-based incremental learning and differential evolution for multiobjective design of trusses. Inf Sci 223:136–215. https://doi.org/10.1016/j.ins.2012.10.008
Pholdee N, Bureerat S (2014) Hybrid real-code population-based incremental learning and approximate gradients for multi-objective truss design. Eng Optim 46:1032–1051. https://doi.org/10.1080/0305215X.2013.823194
Poli R, Kennedy J, Blackwell T (2007) Particle swarm optimization. Swarm Intell 1:33–57. https://doi.org/10.1007/s11721-007-0002-0
Precup R, David R, Petriu EM (2017) Grey wolf optimizer algorithm-based tuning of fuzzy control systems with reduced parametric sensitivity. IEEE Trans Ind Electron 64:527–534. https://doi.org/10.1109/TIE.2016.2607698
Premkumar M, Jangir P, Sowmya R, Alhelou HH, Mirjalili S, Kumar BS (2021) Multi-objective equilibrium optimizer: framework and development for solving multi-objective optimization problems. J Comput Des Eng 9:24–50. https://doi.org/10.1093/jcde/qwab065
Rahman S, Xu H (2004) A univariate dimension-reduction method for multi-dimensional integration in stochastic mechanics. Probab Eng Mech 19:393–408. https://doi.org/10.1016/j.probengmech.2004.04.003
Rahman CM, Rashid TA, Ahmed AM, Mirjalili S (2022) Multi-objective learner performance-based behavior algorithm with five multi-objective real-world engineering problems. Neural Comput Appl 34:6307–6329. https://doi.org/10.1007/s00521-021-06811-z
Rao RV, Savsani VJ, Vakharia DP (2011) Teaching–learning-based optimization: a novel method for constrained mechanical design optimization problems. Comput Aided Des 43:303–315. https://doi.org/10.1016/j.cad.2010.12.015
Ray T, Liew KM (2002) A swarm metaphor for multiobjective design optimization. Eng Optim 34:141–153. https://doi.org/10.1080/03052150210915
Ren Z, Zhang D, Seop Koh C (2014) Multi-objective optimization approach to reliability-based robust global optimization of electromagnetic device. COMPEL 33:191–200. https://doi.org/10.1108/COMPEL-11-2012-0341
Robič T, Filipič B (2005) DEMO: Differential evolution for multiobjective optimization. In: Coello Coello CA, Hernández Aguirre A, Zitzler E (eds) Evolutionary multi-criterion optimization. Springer, Berlin Heidelberg, pp 520–533
Rosario Z, Fenrich RW, Iaccarino G (2019) Cutting the double loop: theory and algorithms for reliability-based design optimization with parametric uncertainty. Int J Numer Meth Eng 118:718–740. https://doi.org/10.1002/nme.6035
Sadollah A, Eskandar H, Bahreininejad A, Kim JH (2015a) Water cycle algorithm for solving multi-objective optimization problems. Soft Comput 19:2587–2603. https://doi.org/10.1007/s00500-014-1424-4
Sadollah A, Eskandar H, Kim JH (2015b) Water cycle algorithm for solving constrained multi-objective optimization problems. Appl Soft Comput 27:279–298. https://doi.org/10.1016/j.asoc.2014.10.042
Sahoo L, Bhunia AK, Kapur PK (2012) Genetic algorithm based multi-objective reliability optimization in interval environment. Comput Ind Eng 62:152–160. https://doi.org/10.1016/j.cie.2011.09.003
Sahoo L, Banerjee A, Bhunia AK, Chattopadhyay S (2014) An efficient GA–PSO approach for solving mixed-integer nonlinear programming problem in reliability optimization. Swarm Evol Comput 19:43–51. https://doi.org/10.1016/j.swevo.2014.07.002
Santos MGC, Silva JL, Beck AT (2018) Reliability-based design optimization of geosynthetic-reinforced soil walls. Geosynth Int 25:442–455. https://doi.org/10.1680/jgein.18.00028
Savsani V, Tawhid MA (2017) Non-dominated sorting moth flame optimization (NS-MFO) for multi-objective problems. Eng Appl Artif Intell 63:20–32. https://doi.org/10.1016/j.engappai.2017.04.018
Shaheen AM, El-Sehiemy RA, Alharthi MM, Ghoneim SSM, Ginidi AR (2021) Multi-objective jellyfish search optimizer for efficient power system operation based on multi-dimensional OPF framework. Energy 237:121478. https://doi.org/10.1016/j.energy.2021.121478
Shan S, Wang GG (2008) Reliable design space and complete single-loop reliability-based design optimization. Reliab Eng Syst Saf 93:1218–1230. https://doi.org/10.1016/j.ress.2007.07.006
Shi Y, Lu Z, Huang Z, Xu L, He R (2020) Advanced solution strategies for time-dependent reliability based design optimization. Comput Methods Appl Mech Eng 364:112916. https://doi.org/10.1016/j.cma.2020.112916
Sivasubramani S, Swarup KS (2011) Multi-objective harmony search algorithm for optimal power flow problem. Int J Electr Power Energy Syst 33:745–752. https://doi.org/10.1016/j.ijepes.2010.12.031
Song LK, Fei CW, Wen J, Bai GC (2017) Multi-objective reliability-based design optimization approach of complex structure with multi-failure modes. Aerosp Sci Technol 64:52–62. https://doi.org/10.1016/j.ast.2017.01.018
Storn R, Price K (1997) Differential evolution–a simple and efficient heuristic for global optimization over continuous spaces. J Global Optim 11:341–359. https://doi.org/10.1023/A:1008202821328
Sun G, Zhang H, Fang J, Li G, Li Q (2017a) Multi-objective and multi-case reliability-based design optimization for tailor rolled blank (TRB) structures. Struct Multidisc Optim 55:1899–1916. https://doi.org/10.1007/s00158-016-1592-1
Sun G, Zhang H, Wang R, Lv X, Li Q (2017b) Multiobjective reliability-based optimization for crashworthy structures coupled with metal forming process. Struct Multidisc Optim 56:1571–1587. https://doi.org/10.1007/s00158-017-1825-y
Tu J, Choi KK, Park YH (1999) A new study on reliability-based design optimization. J Mech Des 121:557–564. https://doi.org/10.1115/1.2829499
Valdebenito M, Schuëller G (2010) A survey on approaches for reliability-based optimization. Struct Multidisc Optim 42:645–663. https://doi.org/10.1007/s00158-010-0518-6
Varadharajan TK, Rajendran C (2005) A multi-objective simulated-annealing algorithm for scheduling in flowshops to minimize the makespan and total flowtime of jobs. Eur J Oper Res 167:772–795. https://doi.org/10.1016/j.ejor.2004.07.020
Wang NF, Zhang XM, Yang YW (2013) A hybrid genetic algorithm for constrained multi-objective optimization under uncertainty and target matching problems. Appl Soft Comput 13:3636–3645. https://doi.org/10.1016/j.asoc.2013.03.013
Wang J, Du P, Niu T, Yang W (2017) A novel hybrid system based on a new proposed algorithm—multi-objective whale optimization algorithm for wind speed forecasting. Appl Energy 208:344–360. https://doi.org/10.1016/j.apenergy.2017.10.031
Wang L, Xiong C, Yang YW (2018) A novel methodology of reliability-based multidisciplinary design optimization under hybrid interval and fuzzy uncertainties. Comput Methods Appl Mech Eng 337:439–457. https://doi.org/10.1016/j.cma.2018.04.003
Wang Y, Hao P, Guo Z, Liu D, Gao Q (2019) Reliability-based design optimization of complex problems with multiple design points via narrowed search region. J Mech Des 10(1115/1):4045420
Wang Q, Huang Z, Dong J (2020) Reliability-based design optimization for vehicle body crashworthiness based on copula functions. Eng Optim 52:1362–1381. https://doi.org/10.1080/0305215X.2019.1657112
While L, Hingston P, Barone L, Huband S (2006) A faster algorithm for calculating hypervolume. IEEE Trans Evol Comput 10:29–38. https://doi.org/10.1109/TEVC.2005.851275
Wolpert DH, Macready WG (1997) No free lunch theorems for optimization. IEEE Trans Evol Comput 1:67–82. https://doi.org/10.1109/4235.585893
Wu YT, Millwater HR, Cruse TA (1990) Advanced probabilistic structural analysis method for implicit performance functions. AIAA J 28:1663–1669. https://doi.org/10.2514/3.25266
Xiao NC, Yuan K, Zhou C (2019) Adaptive kriging-based efficient reliability method for structural systems with multiple failure modes and mixed variables. Comput Methods Appl Mech Eng. https://doi.org/10.1016/j.cma.2019.112649
Xu X, Chen XB, Liu Z, Yang JH, Xu YA, Zhang Y, Gao YK (2021) Multi-objective reliability-based design optimization for the reducer housing of electric vehicles. Eng Optim. https://doi.org/10.1080/0305215x.2021.1923704
Xue J, Wu Y, Shi Y, Cheng S (2012) Brain storm optimization algorithm for multi-objective optimization problems. In: Tan Y, Shi Y, Ji Z (eds) Advances in swarm intelligence. Springer, Berlin, pp 513–519
Yang DX (2010) Chaos control for numerical instability of first order reliability method. Commun Nonlinear Sci Numer Simul 15:3131–3141. https://doi.org/10.1016/j.cnsns.2009.10.018
Yang XS (2011) Bat algorithm for multi-objective optimisation. Int J Bio Inspir Comput 3:267–274. https://doi.org/10.1504/IJBIC.2011.042259
Yang D, Li G, Cheng G (2006) Convergence analysis of first order reliability method using chaos theory. Comput Struct 84:563–571. https://doi.org/10.1016/j.compstruc.2005.11.009
Yang XS, Karamanoglu M, He X (2014) Flower pollination algorithm: a novel approach for multiobjective optimization. Eng Optim 46:1222–1237. https://doi.org/10.1080/0305215X.2013.832237
Yang IT, Hsieh YH, Kuo CG (2016) Integrated multiobjective framework for reliability-based design optimization with discrete design variables. Autom Constr 63:162–172. https://doi.org/10.1016/j.autcon.2015.12.010
Yang M, Zhang D, Han X (2020) New efficient and robust method for structural reliability analysis and its application in reliability-based design optimization. Comput Methods Appl Mech Eng 366:113018. https://doi.org/10.1016/j.cma.2020.113018
Yang JS, Chen JB, Beer M, Jensen H (2022a) An efficient approach for dynamic-reliability-based topology optimization of braced frame structures with probability density evolution method. Adv Eng Softw 173:103196. https://doi.org/10.1016/j.advengsoft.2022.103196
Yang Y, Liao Q, Wang J, Wang Y (2022b) Application of multi-objective particle swarm optimization based on short-term memory and K-means clustering in multi-modal multi-objective optimization. Eng Appl Artif Intell 112:104866. https://doi.org/10.1016/j.engappai.2022.104866
Yi P, Cheng G, Jiang L (2008) A sequential approximate programming strategy for performance-measure-based probabilistic structural design optimization. Struct Saf 30:91–109. https://doi.org/10.1016/j.strusafe.2006.08.003
Youn BD, Choi KK (2004) An investigation of nonlinearity of reliability-based design optimization approaches. J Mech Des 126:403–411. https://doi.org/10.1115/1.1701880
Youn BD, Choi KK, Park YH (2003) Hybrid analysis method for reliability-based design optimization. J Mech Des 125:221–232. https://doi.org/10.1115/1.1561042
Youn BD, Choi KK, Du L (2005a) Adaptive probability analysis using an enhanced hybrid mean value method. Struct Multidisc Optim 29:134–148. https://doi.org/10.1007/s00158-004-0452-6
Youn BD, Choi KK, Du L (2005b) Enriched performance measure approach for reliability-based design optimization. AIAA J 43:874–884. https://doi.org/10.2514/1.6648
Youn BD, Choi KK, Yi K (2005c) Performance moment integration (PMI) method for quality assessment in reliability-based robust design optimization. Mech Based Des Struct Mach 33:185–213. https://doi.org/10.1081/Sme-200067066
Yu S, Wang Z (2019) A general decoupling approach for time- and space-variant system reliability-based design optimization. Comput Methods Appl Mech Eng 357:112608. https://doi.org/10.1016/j.cma.2019.112608
Yuan K, Xiao NC, Wang Z, Shang K (2019) System reliability analysis by combining structure function and active learning Kriging model. Reliab Eng Syst Saf. https://doi.org/10.1016/j.ress.2019.106734
Zafar T, Zhang Y, Wang Z (2020) An efficient Kriging based method for time-dependent reliability based robust design optimization via evolutionary algorithm. Comput Methods Appl Mech Eng 372:113386. https://doi.org/10.1016/j.cma.2020.113386
Zaman K, Mahadevan S (2017) Reliability-based design optimization of multidisciplinary system under aleatory and epistemic uncertainty. Struct Multidisc Optim 55:681–699. https://doi.org/10.1007/s00158-016-1532-0
Zhang Q, Li H (2007) MOEA/D: a multiobjective evolutionary algorithm based on decomposition. IEEE Trans Evol Comput 11:712–731. https://doi.org/10.1109/TEVC.2007.892759
Zhang Z, Deng W, Jiang C (2021) A PDF-based performance shift approach for reliability-based design optimization. Comput Methods Appl Mech Eng 374:113610. https://doi.org/10.1016/j.cma.2020.113610
Zhao W (2021) A Broyden–Fletcher–Goldfarb–Shanno algorithm for reliability-based design optimization. Appl Math Model 92:447–465. https://doi.org/10.1016/j.apm.2020.11.012
Zhong K, Zhou G, Deng W, Zhou Y, Luo Q (2021) MOMPA: multi-objective marine predator algorithm. Comput Methods Appl Mech Eng 385:114029. https://doi.org/10.1016/j.cma.2021.114029
Zhong CT, Li G, Meng Z (2022) Beluga whale optimization: a novel nature-inspired metaheuristic algorithm. Knowl Based Syst 251:109215. https://doi.org/10.1016/j.knosys.2022.109215
Zhu SP, Keshtegar B, Trung NT, Yaseen ZM, Bui DT (2021) Reliability-based structural design optimization: hybridized conjugate mean value approach. Eng Comput 37:381–394. https://doi.org/10.1007/s00366-019-00829-7
Zhu SP, Keshtegar B, Ben Seghier MEA, Zio E, Taylan O (2022) Hybrid and enhanced PSO: novel first order reliability method-based hybrid intelligent approaches. Comput Methods Appl Mech Eng 393:114730. https://doi.org/10.1016/j.cma.2022.114730
Zio E (2013) Monte Carlo simulation: the method. In: Zio E (ed) The Monte Carlo simulation method for system reliability and risk analysis. Springer, London, pp 19–58. https://doi.org/10.1007/978-1-4471-4588-2_3
Zitzler E, Deb K, Thiele L (2000) Comparison of multiobjective evolutionary algorithms: empirical results. Evol Comput 8:173–195. https://doi.org/10.1162/106365600568202
Zou F, Wang L, Hei X, Chen D, Wang B (2013) Multi-objective optimization using teaching-learning-based optimization algorithm. Eng Appl Artif Intell 26:1291–1300. https://doi.org/10.1016/j.engappai.2012.11.006
Acknowledgements
The supports of the National Natural Science Foundation of China (Grant Nos. 11972143 and 11602076), Key Laboratory of High-Efficiency and Clean Mechanical Manufacture at Shandong University, Ministry of Education, and Fundamental Research Funds for the Central Universities of China (Grant Nos. JZ2020HGPA0112 and JZ2020HGTA0080) are much appreciated.
Author information
Authors and Affiliations
Corresponding author
Ethics declarations
Conflict of interest
On behalf of all authors, the corresponding author states that there is no conflict of interest.
Replication of results
All the algorithms and analyses are implemented through MATLAB. We have uploaded the codes of the examples 1 and 2 on the GitHub (https://github.com/hfut-mengz/multiobjective-reliability-based-design-optimization-algorithm.git).
Additional information
Responsible Editor: Chao Hu
Publisher's Note
Springer Nature remains neutral with regard to jurisdictional claims in published maps and institutional affiliations.
Appendices
Appendix
Multiobjective RBDO for spring
The multiobjective RBDO of spiral squeezing spring is selected as the first example, which is modified from (Kannan and Kramer 1994; Kumar et al. 2021a). The multiobjective RBDO of spring can be deemed as a real mechanical application example with integer, discrete, and continuous variables. The schematic view is shown in Fig.

Schematic view of spiral squeezing spring
4. There are two design objectives and eight constraints. The first objective is minimizing volume of the steel wire, while the second objective is minimizing the shear stress. The integer variable \(x_{1}\) and the discrete variable \(x_{3}\) are considered as the deterministic design variables, while the continuous variable \(x_{2}\) is selected as the random variable that obeys the normal distribution with standard deviation 0.005.
where
Multiobjective RBDO for simply supported I-beam
A simply supported I-beam is used as the second examples, which is widely tested by different researches (Huang et al. 2006; Kumar et al. 2021a). The schematic diagram is plotted in Fig.

Schematic view of simply supported I-beam
5. There are two loads, i.e., P = 600 kN and Q = 50 kN. The Young’s modulus E is 2 × 104 kN/cm2. The length L is 200 cm. The allowable bending stress σb is 16 kN/cm2. Two design objectives are minimizations of cross-sectional area and vertical deflection. The stress constraint is utilized. The geometric dimensions are selected as the design and random variables, which are assumed following the normal distribution with standard deviation 0.005.
Multiobjective RBDO for ten bar truss
A ten bar truss is tested, which is modified from (Yi et al. 2008). The boundary condition is illustrated in Fig.

Schematic view of ten bar truss
6. The values of loads P1 and P2 are 105 Psi. The Young’s modulus is 107 Psi. Both compliance and volume are selected as the design objectives. The first ten constraints are the stresses should be less than 2.5 × 104 Psi, while the eleventh constraint is the allowable vertical nodal displacement should be less than 4.5 in. The multiobjective RBDO model is as follows:
Multiobjective RBDO for welded beam
As plotted in Fig.

Schematic view of a welded beam
7, the multiobjective RBDO of welded beam is performed, which is modified from the deterministic multiple-objective optimization example (Dhiman and Kumar 2018; Ray and Liew 2002). The task is to minimizing the cost and maximum deflection, while the constraints are related to the shear stress, bending stress, and buckling load. The multiobjective RBDO model is as follows:
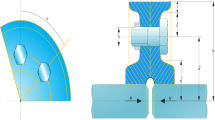
Multiobjective RBDO for speed reducer
The fifth multiobjective RBDO example is based on the super reducer, which is a popular tested engineering optimization problem. The schematic diagram is potted in Fig.

Schematic view of speed reducer
8. There are two objectives, including minimizing the structural weight and stress. Seven uncertain variables and eleven constraints are considered. The details can been seen in studies of (Cho and Lee 2011) and (Chen et al. 2018). The multiobjective RBDO formulation is expressed as follows:
Multiobjective RBDO for disk brake
This multiobjective RBDO problem is modified from the deterministic optimization (Gong et al. 2009; Houssein et al. 2022). There are two objectives and four design variables. The design objectives include brake mass and stopping time. The design and random variables include disk radii, engaging force, and friction surface number. The multiobjective RBDO model is depicted by
Multiobjective RBDO for high-dimensional example
This high-dimensional multiobjective RBDO problem is also modified from deterministic optimization problem (Cheng et al. 2021). It contains 20 random variables, and their means are considered as design variables. The multiobjective RBDO model is depicted by
Rights and permissions
Springer Nature or its licensor (e.g. a society or other partner) holds exclusive rights to this article under a publishing agreement with the author(s) or other rightsholder(s); author self-archiving of the accepted manuscript version of this article is solely governed by the terms of such publishing agreement and applicable law.
About this article

Cite this article
Meng, Z., Yıldız, B.S., Li, G. et al. Application of state-of-the-art multiobjective metaheuristic algorithms in reliability-based design optimization: a comparative study. Struct Multidisc Optim 66, 191 (2023). https://doi.org/10.1007/s00158-023-03639-0
Received:
Revised:
Accepted:
Published:
DOI: https://doi.org/10.1007/s00158-023-03639-0