
Abstract
In general relativity, time functions are crucial objects whose existence and properties are intimately tied to the causal structure of a spacetime and also to the initial value formulation of the Einstein equations. In this work we establish all fundamental classical existence results on time functions in the setting of Lorentzian (pre-)length spaces (including causally plain continuous spacetimes, closed cone fields and even more singular spaces). More precisely, we characterize the existence of time functions by K-causality, show that a modified notion of Geroch’s volume functions are time functions if and only if the space is causally continuous, and lastly, characterize global hyperbolicity by the existence of Cauchy time functions, and Cauchy sets. Our results thus inevitably show that no manifold structure is needed in order to obtain suitable time functions.
Similar content being viewed by others

Avoid common mistakes on your manuscript.
1 Introduction
On a smooth spacetime (M, g) a continuous function \(t:M \rightarrow \mathbb {R}\) is called a time function if it satisfies
where \(p < q\) means that there exists a future-directed causal curve from p to q, and that \(p \ne q\). Time functions play a crucial role in Lorentzian causality theory and Einstein’s general theory of relativity.
The study of time functions has a long history in general relativity. Their origin can be traced back to the works of Geroch and Hawking in the late 1960s. Geroch introduced volume time functions by normalizing the volume of a spacetime to one, and by defining the time of a point p as the volume of its chronological past \(I^-(p)\). In his seminal work [31] from 1970, Geroch used these volume functions to characterize global hyperbolicity by the existence of Cauchy surfaces and to obtain a topological splitting. Global hyperbolicity is the strongest and most important causality condition in general relativity. Cauchy surfaces represent the natural sets to pose initial conditions for the Einstein equations (for a self-contained exposition see [58]). Moreover, global hyperbolicity and its different characterizations play a crucial role in the singularity theorems of Penrose and Hawking (see [36, Sect. 8.2]), the Lorentzian splitting theorems (see [6, 25, 29] and follow-up work) and the formulation of Quantum Field Theory on curved backgrounds [5, Chapter 4].
Building upon Geroch’s idea, Hawking [35] showed that volume functions can be “smeared out” to obtain time functions at a significantly lower step on the causal ladder, namely stable causality (see also the work of Minguzzi [49, 50] for the same result via the equivalent notion of K-causality and [52, Fig. 20] for a depiction of the complete causal ladder). This result contributed to Hawking’s program to find the minimal causality conditions that one should impose on a spacetime in order to consider it as physically reasonable. As an in-between result between stable causality and global hyperbolicity, Hawking and Sachs [37] showed in 1974 that Geroch’s volume functions are continuous themselves (that is, without the use of an averaging procedure) precisely when the spacetime is causally continuous. Their proof, however, contained a loophole that was later filled by Dieckmann [21, 23].
After these foundational works, the question remained whether time functions and Cauchy surfaces can be chosen smooth, rather than just continuous. Despite several attempts by Seifert [61], Sachs and Wu [59] and Dieckmann [21, 22], this problem remained open for decades. Only in the early 2000s, it was firmly established by Bernal and Sánchez [7,8,9] that a spacetime that admits a continuous time function also admits a smooth one, and that Geroch’s topological splitting of globally hyperbolic spacetimes can be promoted to a smooth, orthogonal splitting. Building on these results, Sämann [60] showed that even if the metric tensor is merely continuous, global hyperbolicity still implies the existence of smooth Cauchy surfaces and time functions (but no orthogonal splitting). This is in spite of the pathological behavior that continuous metrics exhibit, first discovered by Chruściel and Grant [19], such as “causal bubbles” (failure of the push-up property) and not necessarily open chronological futures/pasts [30, 34, 45, 63]. While their work differs significantly from previous approaches, it was recently established by Chruściel, Grant and Minguzzi [20] that also a family of Geroch’s time functions are continuously differentiable for globally hyperbolic \(C^{2,1}\)-metrics, and that Hawking’s time functions can be smoothed out.
A radically different approach to show smoothness of time functions is that of Fathi and Siconolfi [26, 27], which uses weak KAM theory. It has the added advantage that it is formulated for smooth manifolds equipped with a continuous field of closed convex tangent cones, of which Lorentzian manifolds are just one class of examples. Their approach has been developed further in very recent works of Bernard and Suhr [10, 11] (extending Conley theory to this setting) and Minguzzi [53] (using traditional arguments). Besides the elimination of the need of a Lorentzian metric in the theory of closed (causal) cones, also the smooth manifold structure should be removable to some degree. Indeed, it was already pointed out by Minguzzi [51] that sufficient conditions for the existence of time functions can be obtained for more general topological spaces through Nachbin’s theory of closed ordered spaces [55].
It remained open, however, if and to what extent general (and in particular, all finer) results about the existence and properties of time functions known for smooth spacetimes rely on the causal and topological structure alone. Our present work answers this question fully in the abstract framework of Lorentzian (pre-) length spaces by characterizing the existence of several types of time functions with different steps on the causal ladder.
The framework of Lorentzian (pre-)length spaces is widely applicable as a broad range of singular and regular “spacetimes” appearing in the literature are encompassed, including the above-mentioned closed cone fields and causally plain continuous spacetimes. Introduced by Kunzinger and Sämann [42] in 2018, the notion of Lorentzian length spaces makes explicit what is already evident in the early works of Weyl, Penrose and what has also been proposed by various other authors (see, for instance, [12,13,14, 17, 24, 41, 66, 67] and [52, Sect. 4.2.4]), namely that one should treat the causal structure as the most fundamental geometric object in the general theory of relativity. At the same time, an attempt has been made to translate metric geometric techniques à la Gromov that have revolutionized Riemannian geometry to Lorentzian geometry. In this spirit, Lorentzian (pre-)length spaces are defined as essentially metric spaces equipped with a chronological and a causal order satisfying basic order-theoretic properties such as open chronological futures/pasts and the push-up property (see Sect. 2 for precise definitions). This general theory of “spacetime-like” spaces encompasses basically all previously mentioned low-regularity settings. Despite its youth the Lorentzian (pre-)length framework has already celebrated important successes in the context of causality theory [1, 42], inextendibility results [2, 33], synthetic curvature bounds [18, 48, 54] (related to energy conditions in general relativity) and stability [3, 43] with respect to the null distance.
Nonetheless, the question of when a time function on Lorentzian (pre-)length space exists has been neglected until now, the only exception being the recent work of Kunzinger and Steinbauer [43] where it is shown that the existence of certain time functions implies strong causality (the converse, however, is false even in the manifold setting). In the present work, we fill this gap by establishing several sharp existence results. The statements and a discussion of our main results follow.
1.1 Main Results
In this paper we establish three major results relating the existence (and properties) of time functions to three different steps on the causal ladder, starting from the optimal condition for existence (K-causality) and building it up to the top one (global hyperbolicity). All our results in the main body of the paper are obtained for Lorentzian pre-length spaces obeying milder axioms than those required of a Lorentzian length space (all definitions are presented in Sect. 2 in a self-contained way). Establishing our results in the context of Lorentzian pre-length spaces is important because they are more widely applicable and often sufficient (see also [18, 43]). In this introduction, however, we state a simplified version of our theorems in the setting of Lorentzian length spaces (at the end we briefly comment on the pre-length case). Generally, it is useful to recall that on a smooth spacetime, the local causal and topological structure is very rigid (all neighborhoods look the same). Our proofs, on the other hand, rely almost exclusively on global arguments. This way, we can reduce the local assumptions to the bare minimum, doing away completely with the manifold structure.
Our first result characterizes the mere existence of time functions on Lorentzian (pre-)length spaces by K-causality, generalizing a result of Hawking [35] and Minguzzi [50] for smooth spacetimes (note that K-causality is equivalent to stable causality in the smooth setting [49]).
Theorem 1.1
Suppose X is a second countable, locally compact Lorentzian length space. Then X is K-causal if and only if X admits a time function.
Here it is crucial that the K-relation is closed and transitive (by Definition 3.1). Then, as already pointed out by Minguzzi [51], the general theory of topological ordered spaces yields time functions on K-causal spaces. To prove the converse statement, namely that existence of a time function implies K-causality, we closely follow the approach of Minguzzi [50], which requires the use of limit curve theorems.
Our second result is concerned with an explicit construction of time functions on Lorentzian (pre-)length spaces that can be equipped with Borel probability measures. Here, we are influenced by Geroch’s notion of volume functions [31] as well as Hawking’s averaging procedure [35]. Since the boundaries of light cones, however, are no longer hypersurfaces with measure zero as in the smooth manifold setting, the definition of our averaged volume functions as well as the proof of their causal properties and continuity are significantly more involved. The result we obtain is essentially a generalization of a theorem by Hawking and Sachs [37] (and Dieckmann’s rigorous follow-up work [23]), and thus, the corresponding step on the causal ladder is that of causal continuity.
Theorem 1.2
Let X be a second countable, locally compact Lorentzian length space. Then X is causally continuous if and only if the averaged volume functions on X are time functions.
While the assumption on second countability of the underlying metric space is crucial in order to have a suitable measure at hand, local compactness can be removed by using a weaker (but in the smooth case equivalent) notion of causal continuity.
Our third result characterizes globally hyperbolic Lorentzian (pre-)length spaces by the existence of Cauchy time functions, whose level sets are Cauchy sets that are intersected by every inextendible causal curve exactly once. The smooth spacetime analogue is the seminal 1970 result of Geroch [31].
Theorem 1.3
Let X be a second countable Lorentzian length space with a proper metric structure. Then the following are equivalent:
-
(i)
X is globally hyperbolic,
-
(ii)
X is non-totally imprisoning and the set of causal curves between any two points is compact,
-
(iii)
X admits a Cauchy set,
-
(iv)
X admits a Cauchy time function.
To establish Theorem 1.3, we utilize our averaged volume functions introduced already for Theorem 1.2, as well as the behavior of inextendible causal curves. The use of averaged volume functions poses an additional difficulty in our proofs, compared to the smooth case. The other main challenge is the fact that our Cauchy sets are not hypersurfaces, and in fact very little can be deduced about their topology (hence the name Cauchy set instead of surface, see also our discussion below).
The above theorems follow immediately from their sharper versions, Theorems 3.2, 4.13 and 5.4, which are obtained for Lorentzian pre-length spaces. Some essential conditions (which are part of the axioms of Lorentzian length spaces), however, still need to be assumed. In Theorem 3.2 (generalizing Theorem 1.1), for instance, we need to additionally impose the existence of causal curves and their limit curves. The chronological relation, however, is not needed in the proof at all. The proof of Theorem 4.13 (corresponding to Theorem 1.2), on the other hand, does not require causal curves, but does make use of both the causal and chronological relation. Furthermore, the two relations need to satisfy a compatibility condition that we call “approximating”, which simply means that the causal futures and pasts are contained in the closure of the chronological ones. Finally, Theorem 5.4 (the pre-length version of Theorem 1.3) builds upon Theorem 4.13; hence, the “approximating” condition is also needed here. Moreover, causal curves are used already in the definition of Cauchy set and Cauchy time function, and the limit curve theorems will be important again.
1.2 Discussion and Outlook
Since its inception, the framework of Lorentzian length spaces has seen a rapid expansion [1, 2, 18, 33, 42, 43]. Notably, Cavalletti and Mondino [18] recently introduced a notion of Ricci curvature bounds for Lorentzian pre-length spaces, based on optimal transport theory, that mimics the strong energy condition of general relativity, and implies a version of Hawking’s singularity theorem. Our work completes another important milestone in establishing the potential of this non-smooth causal theory by fully characterizing the existence of time functions in terms of the causal ladder. As an immediate application, we have now unambiguously established when one can make use of time functions to define the null distance of Sormani and Vega [64]. Very recently, this notion (as well as convergence) has been investigated by Kunzinger and Steinbauer [43] in the context of Lorentzian pre-length spaces (certain limits of examples in [3, Sect. 5] are also of this type). With our new characterizations, in particular, of global hyperbolicity via Cauchy time functions, more refined convergence/stability results may be obtained. Moreover, it should be straightforward to carry over the cosmological time function of Andersson et al. [4] to the Lorentzian length space framework using the time separation function in place of the Lorentzian distance.
While in broad terms we show that the classical results about time functions admit direct generalizations for Lorentzian length spaces, we also find interesting and not so subtle differences. In particular, although global hyperbolicity is also characterized by the existence of Cauchy sets, these Cauchy sets need not be homeomorphic to each other. This is in stark contrast to the case of spacetimes, where Geroch’s celebrated splitting theorem [31] (later refined by Bernal and Sánchez [7]) shows that all Cauchy surfaces on a given spacetime must have the same topology. In fact, Geroch already showed in [32] that transitions between compact spatial topologies not only contradict global hyperbolicity, but in fact even violate the most basic of all assumptions, chronology. While time travel is a no-go in any physically sound theory, Sorkin [62] argues that topology change is a necessary feature of any convincing candidate theory of quantum gravity. Going beyond the setting of smooth Lorentzian manifolds is thus a necessity in order to admit topology change without violating chronology, a common approach being the use of degenerate Lorentzian metrics [15, 38]. Current proposals for quantum gravity also predict that physical spacetimes are represented by non-manifold-like structures at small scales, such as causal sets [65], causal dynamical triangulations [46], causal fermion systems [28], or spin foams [56]. An interesting and important next step will be to see if and how the framework of Lorentzian length spaces fits into these quantum gravitational theories.
1.3 Outline
The paper is structured as follows. In Sect. 2, we give a self-contained account of the relevant aspects of the theory of Lorentzian (pre-)length spaces, drawing from the existing literature but also introducing new material. We then prove Theorems 1.1, 1.2 and 1.3 (more precisely, the corresponding sharper Lorentzian pre-length space versions) in Sects. 3, 4 and 5, respectively.
2 Lorentzian Pre-length Spaces
In this section we recall, and partly refine, the definition of Lorentzian (pre-)length spaces, their causality conditions and the limit curve theorems. We use the notation and results of [1, 42]. A reader familiar with the smooth case will find that most classical concepts are defined in the same way for Lorentzian pre-length spaces (with the difference that some important properties do not follow automatically but have to be imposed separately, such as causal curves themselves).
In Sect. 2.1 we recall the definition of Lorentzian pre-length space, and of causal curve. This is standard material, except that we use a more precise nomenclature for inextendible causal curves (Definition 2.8). In Sect. 2.2 we revisit the limit curve theorems of Kunzinger and Sämann [42] in the slightly weaker framework of “local weak causal closedness” following a suggestion of Aké et al. [1]. We also introduce the new notion of Lorentzian pre-length spaces with limit curves, which encompasses all necessary assumptions needed for the application of the limit curve theorems. In Sect. 2.3 we introduce the notion of approximating Lorentzian pre-length space, which can be seen as a much weaker version of Kunzinger and Sämann’s “localizability”. Most importantly, we show that our newly introduced properties are, in particular, satisfied by all Lorentzian length spaces. Finally, in Sect. 2.4, we define time functions and introduce some elements of causality theory for Lorentzian pre-length spaces. Notably, we give some new characterizations of non-total imprisonment, both in terms of causal curves and of time functions. Additional causality conditions, including K-causality and global hyperbolicity, are introduced in later sections when needed.
2.1 Basic Definitions and Properties
Definition 2.1
[42, Definition 2.1]. A causal set is a set X equipped with a preorder \(\le \) (called causal relation) and a transitive relation \(\ll \) (called chronological or timelike relation) contained in \(\le \).
The following notation for the timelike/causal future or past of a point is standard
and we write \(p < q\) if \(p \le q\) and \(p \ne q\).
Definition 2.2
[42, Definition 2.8]. A Lorentzian pre-length space is a causal set \((X,\ll ,\le )\) equipped with a metric d and a lower semicontinuous function \(\tau :X \times X \rightarrow [0,\infty ]\) satisfying, for all \(x,y,z \in X\)
-
(i)
\(\tau (x,y) > 0\) \(\Longleftrightarrow \) \(x \ll y\),
-
(ii)
\(\tau (x,y) = 0\) if \(x \not \le y\),
-
(iii)
\(\tau (x,z) \ge \tau (x,y) + \tau (y,z)\) if \(x \le y \le z\).
Occasionally, we denote a Lorentzian pre-length space simply by X. It follows from Definition 2.2 that the sets \(I^\pm (p)\) are open for all \(p \in X\), a fact that we will also refer to as the openness of \(\ll \). The crucial push-up property extends from the smooth situation.
Lemma 2.3
(Push-up [42, Lemma 2.10]). Let \((X,d,\ll ,\le ,\tau )\) be a Lorentzian pre-length space and \(x,y,z \in X\) with \(x \ll y \le z\) or \(x \le y \ll z\). Then \(x \ll z\).
The function \(\tau \) in Definition 2.2 is often called time separation function or Lorentzian distance function. We will not use this terminology. In fact, we never need the function \(\tau \) by itself but just the openness of \(\ll \) and the push-up property (we could also trivially set \(\tau (p,q) = \infty \) if \(p \ll q\) and \(=0\) otherwise).
In smooth Lorentzian geometry the causal character of curves determines the timelike and causal future and past, that is \(I^\pm \) and \(J^\pm \), respectively. In Lorentzian pre-length spaces it is the other way round.
Definition 2.4
[42, Definition 2.18]. Let \((X,d,\ll ,\le ,\tau )\) be a Lorentzian pre-length space and I be any (open, half-open, or closed) interval in \(\mathbb {R}\). A non-constant locally Lipschitz path \(\gamma :I \rightarrow X\) is called a
-
(i)
future-directed causal curve if \(\gamma (s_1) \le \gamma (s_2)\) for all \(s_1 < s_2 \in I\).
-
(ii)
past-directed causal curve if \(\gamma (s_2) \le \gamma (s_1)\) for all \(s_1 < s_2 \in I\).
Future- and past-directed timelike curves are defined analogously by replacing \(\le \) with \(\ll \).
Remark 2.5
By a result in metric geometry (see, for instance, [16, Proposition 2.5.9]), we can parametrize any causal curve by d-arclength (the reference is for closed intervals only, but the proof is in fact valid for any interval). Recall that \(\gamma :I \rightarrow X\) is parametrized by d-arclength iff
Since a curve that is parametrized by d-arclength is automatically 1-Lipschitz continuous, causal curves remain causal when parametrizing them by d-arclength. Hence, without loss of generality, we can assume that causal curves are parametrized in a way so that they are not locally constant, i.e., not constant on any open subinterval of \(\mathbb {R}\).
Definition 2.6
[42, Definition 3.1]. A Lorentzian pre-length space X is called causally path-connected if for every \(p < q\) there exists a future-directed causal curve connecting p and q, and for every \(p \ll q\) a future-directed timelike curve connecting p and q.
Definition 2.7
[1, Definition 2.19]. For a subset U of a Lorentzian pre-length space X we define the relation \(\le _U\) by
A neighborhood U is called weakly causally closed if \(\le _U\) is closed, and the Lorentzian pre-length space X is called locally weakly causally closed if every point \(p \in X\) is contained in a weakly causally closed neighborhood U.
Definition 2.7 is satisfied on any smooth Lorentzian manifold and thus acts as a replacement for regularity on a Lorentzian pre-length space. In contrast, the “local causal closedness” condition of Kunzinger and Sämann [42, Definition 3.4] is stronger than Definition 2.7 because it requires that \(\le \) restricted to \(\overline{U} \times \overline{U}\) is closed. For instance, in the smooth case the latter notion would only be satisfied on strongly causal spacetimes (see [1, p. 6] for a detailed discussion). Note also that weak causal closedness is most natural on causally path-connected spaces (as it would be a void condition on spaces with no causal curves at all), so one may even include causal path-connectedness in the definition, as done implicitly in [1].
Finally, we refine the concept of an inextendible curve.Footnote 1
Definition 2.8
Let X be a Lorentzian pre-length space and \(\gamma :(a,b) \rightarrow X\) be a future-directed causal curve. If there exists a causal curve \(\bar{\gamma }:(a,b] \rightarrow X\) such that \(\bar{\gamma }\vert _{(a,b)} = \gamma \), we say that \(\gamma \) is future-extendible. If there exists a causal curve \(\tilde{\gamma }:[a,b) \rightarrow X\) such that \(\tilde{\gamma }\vert _{(a,b)} = \gamma \), we say that \(\gamma \) is past-extendible. We say that \(\gamma \) is future-(past-)inextendible if it is not future-(past-)extendible, and doubly inextendible if it is neither future- nor past-extendible.
The analogous definition for past-directed causal curves is obtained by interchanging future and past in Definition 2.8. The definition applies accordingly to half-open intervals. If a path is defined on all of \(\mathbb {R}\), we mean extendibility to \(\pm \infty \). Alternatively, we can parametrize it by arclength and apply the following lemma (which, of course, admits also a past version).
Lemma 2.9
Let X be a locally weakly causally closed Lorentzian pre-length space, let \(-\infty< a < b \le \infty \) and let \(\gamma :[a, b) \rightarrow X\) be a future-directed causal curve parametrized with respect to d-arclength. If (X, d) is a proper metric space or the curve \(\gamma \) is contained in a compact set, then \(\gamma \) is future-inextendible if and only if \(b = \infty \). In this case \(L^d (\gamma ) = \infty \). Moreover, \(\gamma \) is future-inextendible if and only if \(\lim _{t \nearrow b} \gamma (t)\) does not exist.
Proof
First, assume that \(b = \infty \). If \(\gamma \) admitted an extension \(\bar{\gamma }\) as in Definition 2.8, then \(\bar{\gamma }\) would be locally Lipschitz and have two endpoints. Therefore, \(L^d(\bar{\gamma }) < \infty \), but also \(L^d(\bar{\gamma })=L^d(\gamma ) = b-a\) (since we have only added one point), a contradiction. The rest of the proof is the same as [42, Lemma 3.12]. Note that there, the assumption of local “strong” causal closedness is only applied to points which lie on \(\gamma \). Hence, that proof also works with our notion of weakly causally closed neighborhood. \(\square \)
In the remaining subsection, we recall the definition of Lorentzian length space (including necessary preliminary notions) as introduced in [42]. While we will not directly work with Lorentzian length spaces in the main body of this paper, our results about pre-length spaces immediately also lead to useful Corollaries in this setting (see Introduction). A Lorentzian length space is, in essence, just the Lorentzian analogue of length metric spaces generalizing Riemannian manifolds where the time separation function \(\tau \) is used in place of a distance function to measure lengths and the admissible class of curves respects causality. More precisely, if \(\gamma :[a,b] \rightarrow X\) is a future-directed causal curve, then its \(\tau \)-length \(L_{\tau }(\gamma )\) is defined by (see [42, Definition 2.24])
In addition, the notion of localizability is needed.
Definition 2.10
[42, Definition 3.16] and [1, Definition 2.22].Footnote 2 We call a Lorentzian pre-length space \((X,d,\ll ,\le ,\tau )\) localizable if for every point \(p \in X\), there exists a neighborhood \(U_p\) of p such that
-
(i)
There exists a constant \(C > 0\) such that for all causal curves contained in \(U_p\) we have \(L^d(\gamma )\le C\).
-
(ii)
For every \(q \in U_p\) we have \(I^\pm (q) \cap U_p \ne \emptyset \).
-
(iii)
There exists a continuous function \(\omega _p :U_p \times U_p \rightarrow [0,\infty )\) such that \((U_p,d \vert _{U_p \times U_p}, \ll _{U_p}, \le _{U_p}, \omega _p)\) is a Lorentzian pre-length space. Moreover, for all \(x,y \in U_p\) with \(x < y\), it holds that
$$\begin{aligned} \omega _p(x,y) = \max \{L_\tau (\gamma ) \mid \gamma :[a,b] \rightarrow U_p \text { future-dir. causal from { x} to { y} } \}, \end{aligned}$$so in particular there exists a maximizing causal curve between x and y.
In the main sections of this paper, only assumptions (i) and (ii) of Definition 2.10 are needed; thus, we restate them separately in the upcoming sections (see Definitions 2.14 and 2.17, Lemma 2.19 and Proposition 2.20). By further assuming that also \(\tau \) is given by length-maximization (but without necessarily requiring the existence of global maximizers), one obtains a Lorentzian length space.
Definition 2.11
[42, Definition 3.22]. A causally path-connected, locally (weakly) causally closed and localizable Lorentzian pre-length space \((X,d,\ll ,\le ,\tau )\) is called a Lorentzian length space if for all \(p,q \in X\)
2.2 Limit Curve Theorems
We revisit the limit curves theorems of Kunzinger and Sämann [42, Sect. 3.2] and relax their assumption of local causal closedness to local weak causal closedness (see Definition 2.7). That this extension is possible was already pointed out by Aké et al. [1, p. 8]. The limit curve theorems are crucial for Sects. 3 and 5.
We start with [42, Lemma 3.6] where, instead of pointwise convergence, we need to assume locally uniform convergence.
Lemma 2.12
Let X be a causally path-connected locally weakly causally closed Lorentzian pre-length space and let \((\gamma _n)_{n}\) be a sequence of future-directed causal curves \(\gamma _n :I \rightarrow X\) converging locally uniformly to a non-constant locally Lipschitz curve \(\gamma :I \rightarrow X\). Then \(\gamma \) is future-directed causal.
Proof
For every \(s \in I\) there exists a weakly causally closed neighborhood \(U_{\gamma (s)}\). By continuity, we can pick \(s_1< s < s_2\) such that \(\gamma ([s_1,s_2]) \subseteq U_{\gamma (s)}\) (if s is a boundary point of I, then \(s_1=s\) or \(s_2=s\) is chosen). Assume additionally that we choose \(s_1, s_2\) close enough such that \((\gamma _n)_{n}\) converges uniformly on \([s_1,s_2]\). This implies that there exists \(n_0 \in \mathbb {N}\) such that for all \(n > n_0\), \(\gamma _n([s_1,s_2]) \subseteq U_{\gamma (s)}\). Now it follows from the definition of weakly causally closed neighborhood that \(\gamma \) restricted to \([s_1,s_2]\) is future-directed causal. Since s was arbitrary, we can decompose \(\gamma \) as a concatenation of future-directed causal curves; hence, by transitivity of \(\le \), \(\gamma \) is future-directed causal on I. \(\square \)
Theorem 2.13
(Limit curve theorem). Let X be a causally path-connected locally weakly causally closed Lorentzian pre-length space. Let \((\gamma _n)_n\) be a sequence of future-directed causal curves \(\gamma _n :[a, b] \rightarrow X\) that are uniformly Lipschitz continuous, i.e., there is an \(L > 0\) such that \({\text {Lip}}(\gamma _n ) \le L\) for all \(n \in \mathbb {N}\). Suppose that there exists a compact set that contains every \(\gamma _n\) or that d is proper and that the curves \((\gamma _n)_n\) accumulate at some point, i.e., there is a \(t_0 \in [a, b]\) such that \(\gamma _n (t_0 ) \rightarrow x_0 \in X\). Then there exists a subsequence \((\gamma _{n_k})_k\) of \((\gamma _n)_n\) and a Lipschitz continuous curve \(\gamma :[a, b] \rightarrow X\) such that \(\gamma _{n_k} \rightarrow \gamma \) uniformly. If \(\gamma \) is non-constant, then \(\gamma \) is a future-directed causal curve.
Proof
The proof of [42, Theorem 3.7] goes through. The assumption of local “strong” causal closedness is only used to invoke [42, Lemma 3.6], but since the convergence is uniform, we can replace it by our Lemma 2.12. \(\square \)
This first limit curve theorem is already very useful. In order to formulate our second limit curve theorem, we need a better control over the d-length of causal curves.
Definition 2.14
[42, Definition 3.13]. A Lorentzian pre-length space \((X,d,\ll ,\le ,\tau )\) is called d-compatible if for every \(p \in X\) there exists a neighborhood U of p and a constant \(C > 0\) such that \(L^d(\gamma ) \le C\) for all causal curves \(\gamma \) contained in U.
To ease the nomenclature, we group some of our previous assumptions into the following definition.
Definition 2.15
A Lorentzian pre-length space with limit curves is a causally path-connected, locally weakly causally closed, and d-compatible Lorentzian pre-length space.
It is an easy consequence that Lorentzian length spaces are particular cases of Lorentzian pre-length spaces with limit curves (see also Proposition 2.20 below).
Theorem 2.16
(Limit curve theorem for inextendible curves). Let X be a Lorentzian pre-length space with limit curves. Let \((\gamma _n )_n\) be a sequence of future-directed causal curves \(\gamma _n :[0, L_n ] \rightarrow X\) which are parametrized with respect to d-arclength and satisfy \(L_n:= L^d (\gamma _n ) \rightarrow \infty \). If there exists a compact set that contains every curve \(\gamma _n ([0, L_n ])\) or if d is proper and \(\gamma _n (0) \rightarrow x\) for some \(x \in X\), then there exists a subsequence \((\gamma _{n_k})_k\) of \((\gamma _n )_n\) and a future-directed causal curve \(\gamma :[0, \infty ) \rightarrow X\) such that \(\gamma _{n_k} \rightarrow \gamma \) locally uniformly. Moreover, \(\gamma \) is future-inextendible.
Proof
The proof of [42, Theorem 3.14] goes through. The assumption of local “strong” causal closedness is only used to invoke [42, Lemmas 3.6 and 3.12, Theorem 3.7], so we can replace them by our Lemmas 2.12, 2.9 and Theorem 2.13 respectively. \(\square \)
While the limit curve theorems are stated for future-directed curves, they of course also hold for past-directed ones.
2.3 Approximating Lorentzian Pre-length Spaces
In this subsection we introduce our new “approximating” condition relating the causal structure and the topology on X. It is satisfied on all spacetimes regardless of their place in the causal ladder, and will be crucial in Sect. 4. In Proposition 2.20 we show that all Lorentzian length spaces automatically fulfill the “approximating” condition, and also our earlier Definition 2.15.
Definition 2.17
A Lorentzian pre-length space \((X,d,\ll ,\le ,\tau )\) is called approximating if for all points \(p \in X\) it holds that \(J^\pm (p) \subseteq \overline{I^\pm (p)}\).
It is called future-(past-)approximating if the approximating property holds for \(+\)(−).
The approximating property can equivalently be characterized via sequences as follows.
Lemma 2.18
Let \((X,d,\ll ,\le ,\tau )\) be a Lorentzian pre-length space. Then X is (future-/past-)approximating if and only if for every point \(p \in X\) there exists a sequence \((p^\pm _n)_n\) in \(I^\pm (p)\) such that \(p^\pm _n \rightarrow p\) as \(n\rightarrow \infty \).
We say that the sequence \((p^+_n)_n\) approximates p from the future, and that the sequence \((p^-_n)_n\) approximates p from the past.
Proof
That such sequences exist on approximating spaces is obvious, because \(p \in J^\pm (p) \subseteq \overline{I^\pm (p)}\). To show the converse, suppose \(q \in J^+(p)\) and \((q_n^+)\) is a sequence in \(I^+(q)\) approximating q from the future. By the push-up Lemma 2.3, \(q_n^+ \in I^+(p)\) for all \(n \in \mathbb {N}\), hence \(q \in \overline{I^+(p)}\). \(\square \)
Assuming that X is causally path-connected, we get even more characterizations, which in the smooth case are in fact the most widely used ones.
Lemma 2.19
Let \((X,d,\ll ,\le ,\tau )\) be a causally path-connected Lorentzian pre-length space. Then the following are equivalent:
-
(i)
X is future-(past-)approximating,
-
(ii)
\(I^+(p) \ne \emptyset \) (\(I^-(p) \ne \emptyset \)) for all \(p \in X\),
-
(iii)
for every point \(p \in X\) there exists a future-(past-)directed timelike curve \(\gamma :[a,b) \rightarrow X\) with \(\gamma (a) = p\).
Note that if X is approximating, we can always join the future- and past-directed curves from point (iii) to find a timelike curve \(\gamma :(a,b) \rightarrow X\) through p.
Proof
(i) \(\implies \) (ii) Let \(p \in X\) be any point. Then \(p \in J^+(p)\), so if X is future-approximating, we get that \(\emptyset \ne J^+(p) \subseteq \overline{I^+(p)}\). This implies that \(I^+(p) \ne \emptyset \).
(ii) \(\implies \) (iii) By assumption, there exists points \(q \in I^+(p)\). By causal path-connectedness, there exists a future-directed timelike curve \(\gamma \) from p to q, which by Definition 2.4 must be non-constant, even if \(p=q\). We can then remove the appropriate endpoint of \(\gamma \) to get the desired curve.
(iii) \(\implies \) (i) Let \(p \in X\) and \(\gamma :[a,b) \rightarrow X\) be a future-directed timelike curve with \(\gamma (a) = p\). By continuity of \(\gamma \), we have \(p = \lim _{s \rightarrow a} \gamma (s)\), so \(p \in \overline{I^+(p)}\).
The past statements are proved analogously. \(\square \)
We can now easily see how Lorentzian length spaces are particular cases of the more general pre-length spaces that we will be working with in the rest of the paper.
Proposition 2.20
If X is a localizable, causally path-connected Lorentzian pre-length space, then X is approximating and d-compatible. If X is a Lorentzian length space, then X is an approximating Lorentzian pre-length space with limit curves.
Proof
If X is localizable, then by property (i) in Definition 2.10, X is d-compatible. Furthermore, by property (ii), every point \(q \in X\) has \(I^\pm (q) \ne \emptyset \), and then by Lemma 2.19, X is approximating. The second statement follows trivially from the definitions. \(\square \)
Remark 2.21
In connection with the null distance on Lorentzian pre-length spaces, Kunzinger and Steinbauer [43, Definition 3.4] introduced the notion of sufficiently causally connectedness (scc). A Lorentzian pre-length space is scc if it is path-connected (in the sense of metric spaces), causally path-connected (Definition 2.6) and every point \(p \in X\) lies on some timelike curve \(\gamma \). While the last condition is reminiscent of property (iii) in our Lemma 2.19, it is in fact weaker, since scc puts no restriction on whether p should be a future (or past) endpoint of \(\gamma \). On the other hand, we do not need to assume path-connectedness.
Having established the existence of causal (even timelike) curves through every point in Lemma 2.19, the question remains whether one can find a (doubly) inextendible causal curve through every point (see Definition 2.8). The following proposition and corollary answer this question in the affirmative, which will be crucial in Sect. 5 when studying Cauchy sets. We need to assume that (X, d) is proper in order to invoke the limit curve theorem. The use of the latter is also the reason why we only prove the existence of intextendible causal (and not timelike) curves.
Proposition 2.22
(Existence of maximal extensions of causal curves). Let X be an approximating Lorentzian pre-length space with limit curves. Suppose, in addition, that (X, d) is proper. Then, for every future-(past-)directed causal curve \(\gamma :[a,b) \rightarrow X\) with \(b < \infty \), there exists \(c \in [b,\infty ]\) and a future-(past-) inextendible causal curve \(\lambda : [a,c) \rightarrow X\) such that \(\lambda \vert _{[a,b)} = \gamma \).
Proof
Consider, without loss of generality, the case that \(\gamma \) is future-directed. If \(\gamma \) is already inextendible, there is nothing to prove since we can just choose \(c=b\). Hence, we consider the case of \(\gamma \) being extendible. Then \(\gamma \) has an endpoint, which we will, by abuse of notation, denote as \(\gamma (b)\). Since X is approximating, by Lemma 2.19 there is a future-directed timelike curve starting at \(\gamma (b)\). Concatenating it with \(\gamma \), we get a proper extension \(\tilde{\gamma }:[a,c) \rightarrow X\) of \(\gamma \), where \(c > b\). If we can choose \(\tilde{\gamma }\) to be inextendible, we are done. Hence, suppose for the sake of contradiction that all extensions of \(\gamma \) are themselves extendible. There are two possible cases:
-
1.
There exists a constant \(C>0\) such that the d-arclength of all extensions of \(\gamma \) is bounded by C. Suppose that we have chosen C as small as possible. Then there exists a sequence \((\gamma _n)_n\) of extensions such that \(L^d(\gamma _n) \rightarrow C\). Since all the \(\gamma _n\) are extendible (hence we can add their future-endpoints) and agree at the point \(\gamma (b)\), by Theorem 2.13 a subsequence converges to a limit curve \(\gamma _\infty :[a,c] \rightarrow X\) of arclength \(L^d(\gamma _\infty ) = C\). But then, by the above, \(\gamma _\infty \) admits a future extension, which is then also an extension of \(\gamma \) and has arclength greater than C, a contradiction.
-
2.
There exists a sequence \((\gamma _n)_n\) of extensions of \(\gamma \) such that \(L^d(\gamma _n) \rightarrow \infty \). In this case we can apply Theorem 2.16 to find an inextendible limit curve \(\gamma _\infty \) of a subsequence. This \(\gamma _\infty \) is then the desired inextendible extension of \(\gamma \). \(\square \)
Combining Lemma 2.19 and Proposition 2.22 gives us an important conclusion.
Corollary 2.23
Let X satisfy the assumptions of Proposition 2.22. Then, for every point \(p \in X\), there exists a doubly inextendible causal curve passing through p. \(\square \)
2.4 Causality Conditions and Time Functions
The conditions in the previous subsections relating the topology and the causal structure (such as approximating) are satisfied automatically when the topology is that of a manifold, and the causal structure is induced by a Lorentzian metric. They can thus be thought of as making our Lorentzian pre-length spaces more “manifold-like”, while still being much more general. In this subsection, on the other hand, we are going to discuss causality conditions, i.e., steps on the causal ladder, which are not satisfied by all smooth spacetimes and hence also not by all Lorentzian pre-length spaces. They should be thought of as criteria for physical reasonability.
In this section, we consider the notions of causality and non-total imprisonment, and the definition of time functions (for an in-depth treatment of the causal ladder for Lorentzian length spaces, see [1]). Most of the material is standard, but Theorem 2.27 and Proposition 2.28 are new. The goal of this paper is to characterize the existence of (certain kinds of) time functions by suitable causality conditions, which will be introduced in the main sections. The causality conditions in this section are weaker, but also play an important role.
A smooth spacetime is called causal if it contains no closed causal curves. The following equivalent definition is better suited for Lorentzian pre-length spaces.
Definition 2.24
[42, Definition 2.35]. A Lorentzian pre-length space is called causal if for any two points \(p,q \in X\), \(p < q\) implies \(q \not < p\).
Time functions too can be defined either via causal curves (time functions are then required to be strictly increasing on future-directed causal curves), or in the following, more order-theoretic manner.
Definition 2.25
A function \(f :X \rightarrow \mathbb {R}\) on a Lorentzian pre-length space \((X,d,\ll ,\le ,\tau )\) is called a generalized time function if for all \(p,q \in X\),
It is called a time function if it is also continuous.
Clearly, the existence of a (generalized) time function requires that the underlying space is at least causal.
In the smooth case, non-total imprisonment is equivalent to the following definition (see, for instance, [52, Theorem 4.39]).
Definition 2.26
[42, Definition 2.35]. A Lorentzian pre-length space \((X,d,\ll ,\le ,\tau )\) is called non-totally imprisoning if for every compact set \(K \subseteq X\) there exists a constant \(C>0\) such that for every causal curve \(\gamma \) with image in K, \(L^d(\gamma ) \le C\).
As a corollary to the limit curve theorems, we obtain the following alternative characterizations.
Theorem 2.27
Let X be a Lorentzian pre-length space with limit curves. Then the following are equivalent.
-
(i)
X is non-totally imprisoning.
-
(ii)
No compact set in X contains a future-inextendible causal curve.
-
(iii)
No compact set in X contains a past-inextendible causal curve.
-
(iv)
No compact set in X contains a doubly inextendible causal curve.
Proof
The equivalence between (i), (ii) and (iii) is shown in [42, Corollary 3.15]. As a consequence of Lemma 2.9, any doubly inextendible curve has infinite arclength. Thus, (i) implies (iv).
It remains to be shown that (iv) implies (i). Suppose X is not non-totally imprisoning. Then there exists a compact set K and a sequence of future-directed causal curves \(\gamma _n :[0,L_n] \rightarrow X\), parametrized by arclength and contained in K, such that \(L_n = L^d(\gamma _n) \rightarrow \infty \). Consider the sequence of future-directed causal curves \(\bar{\gamma }_n :[0,L_n/2] \rightarrow X\) given by
Then also \(L^d(\bar{\gamma }_n) = L_n/2 \rightarrow \infty \) and we can apply Theorem 2.16 to find a converging subsequence \((\bar{\gamma }_{n_k})_k\) and a future-inextendible causal limit curve \(\bar{\gamma }:[0,\infty ) \rightarrow X\). Next consider the sequence of past-directed causal curves \(\tilde{\gamma }_k :[-L_n/2,0] \rightarrow X\) given by
Again we can apply Theorem 2.16 to find a converging subsequence \((\tilde{\gamma }_{k_m})_m\) and a past-inextendible limit curve \(\tilde{\gamma }:(-\infty ,0] \rightarrow X\). Note that
where the limit in the middle exists by compactness of K, a fact that we had already used implicitly when applying the Limit Curve Theorem 2.16. Thus, the curve \(\tilde{\gamma }\) joined with \(\bar{\gamma }\) is a doubly inextendible causal curve \((-\infty ,\infty ) \rightarrow X\) contained in K. This contradicts our assumption (iv). \(\square \)
The following result was shown by Kunzinger and Sämann for Lorentzian length spaces, but only the assumption of causal path-connectedness is used in the proof.
Proposition 2.28
[42, Theorem 3.26]. Suppose \((X,d,\ll ,\le ,\tau )\) is a causally path-connected Lorentzian pre-length space. If X is non-totally imprisoning, then X is causal.
For spacetimes, it is well-known that the existence of a time function implies strong causality, and that strong causality implies non-total imprisonment. This result has been shown by Kunzinger and Steinbauer for Lorentzian length spaces [43, Theorem 3.13], under the additional assumption that the time function must be topologically locally anti-Lipschitz. We instead give a direct proof of the fact that for Lorentzian pre-length spaces with limit curves, the existence of any kind of time function implies non-total imprisonment.
Lemma 2.29
Let \((X,d,\ll ,\le ,\tau )\) be a Lorentzian pre-length space with limit curves. If X admits a time function, then X is non-totally imprisoning.
Proof
Suppose X is not non-totally imprisoning. Then by Theorem 2.27 there exists a compact set \(K \subseteq X\) and a future-inextendible future-directed causal curve \(\gamma :[0, \infty ) \rightarrow K\). Note the following two facts:
-
(i)
By Lemma 2.9, because \(\gamma \) is inextendible, \(\lim _{s \rightarrow \infty } \gamma (s)\) does not exist.
-
(ii)
By compactness of K, for every sequence \((s_i)_i\) in \([0,\infty )\), there exists a subsequence of \(\left( \gamma (s_i)\right) _i\) that converges in K.
Thus, we can find two sequences \((r_i)_i\) and \((s_i)_i\) in \([0,\infty )\) such that \(p:= \lim _{i \rightarrow \infty } \gamma (r_i) \ne \lim _{i \rightarrow \infty } \gamma (s_i) =: q\) (in particular, both limits exist).
For these p, q, pick \(\delta > 0\) small enough so that \(B_\delta (p)\) is contained in a weakly causally closed neighborhood and \(q \not \in B_\delta (p)\). Assume w.l.o.g. that \(r_1< s_1< r_2 < s_2 \ldots \) and that for all \(i \in \mathbb {N}\) we have \(\gamma (r_i) \in B_{\delta /2} (p)\) and \(\gamma (s_i) \not \in B_{\delta /2}(p)\). Now define a third sequence \((a_i)_i\) with \(r_i< a_i < s_i\) and such that \(a_i\) is the value at which \(\gamma \vert _{[r_i, s_i]}\) first intersects \(\partial B_{\delta /2}(p)\). We then have \(r_i< a_i< s_i < r_{i+1}\). By compactness of \(\partial B_{\delta /2}(p)\), there exists a subsequence of \((\gamma (a_i))_i\) that converges to a point \(q' \ne p\). Since \(r_i < a_i\), we have \(\gamma (r_i) \le \gamma (a_i)\). Because \(B_\delta (p)\) is contained in a weakly causally closed neighborhood, we have \(p < q'\). By assumption, X admits a time function \(t:X \rightarrow \mathbb {R}\), for which it holds that \(t(p) < t(q')\). On the other hand, since \(a_i < r_{i+1}\), we have \(\gamma (a_i) \le \gamma (r_{i+1})\). Thus, \(t(\gamma (a_i)) \le t(\gamma (r_{i+1}))\) for all \(i \in \mathbb {N}\) and by continuity of t and \(\gamma \) also \(t(q') \le t(p)\). Combining this with the previous inequality, we obtain
which is a contradiction. \(\square \)
3 Time Functions and K-Causality
The notion of K-causality was first introduced by Sorkin and Woolgar [63] to study spacetimes with continuous Lorentzian metrics. Among the multiple applications of this concept, we emphasize the work of Minguzzi [50], who showed that for smooth spacetimes, K-causality is equivalent to stable causality. Since Hawking [35] had shown earlier that stable causality is equivalent to the existence of a time function, so is K-causality. Minguzzi in [50] also gave a direct proof of the equivalence between K-causality and the existence of time functions, which is more mathematically rigorous and less dependent on the Lorentzian manifold structure. Since K-causality is a purely order-theoretical notion, it can be used verbatimFootnote 3 for Lorentzian pre-length spaces.
Definition 3.1
[63, Definitions 8 and 9]. Let \((X,d,\ll ,\le ,\tau )\) be a Lorentzian pre-length space. The \(K^+\)-relation on X is defined as the (unique) smallest transitive relation that contains \(\le \) and is (topologically) closed.
A Lorentzian pre-length space X is called K-causalFootnote 4 if the \(K^+\)-relation is antisymmetric.
In this section we establish the equivalence of the existence of time functions and K-causality on certain Lorentzian pre-length spaces (see Theorem 3.2 below and Theorem 1.1 formulated for Lorentzian length spaces). This result generalizes the analogous theorem known for smooth spacetimes by Minguzzi [50, Theorem 7] and the proof is obtained along the same lines.
Theorem 3.2
Suppose \(\tau \) is a second countable, locally compact Lorentzian pre-length space with limit curves. Then X is K-causal if and only if X admits a time function.
Before proving the theorem, we show that time functions can exist more generally also on Lorentzian pre-length spaces that are not K-causal if they do not satisfy the limit curve property (Definition 2.15).
Example 3.3
(There exist Lorentzian pre-length spaces that admit a time function but are neither strongly causal nor K-causal).
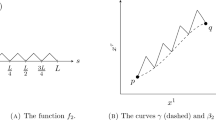
Let (X, d) be the Euclidean plane with coordinates (t, x). For any pair of points \(p_i = (t_i,x_i)\), \(i=1,2\), let
as depicted in Fig. 1, and
This equips (X, d) with the structure of a Lorentzian pre-length space. Clearly, the t-coordinate is a time function.

The sets \(I^+(p)\) (blue, without boundary) and \(J^+(p) = I^+(p) \cup \{p\}\) for a point p in Example 3.3
However, this space is not K-causal, as any closed relation containing \(\le \) (or \(\ll \)) must contain the relation \(\le _R\) given by
But \(\le _R\) is not antisymmetric, so the K-relation will not be antisymmetric either, and our space is therefore not K-causal.
Note that while K-causality implies strong causality on smooth spacetimes and locally compact Lorentzian length spaces [1, Proposition 3.16] this need not be the case for Lorentzian pre-length spaces. To see that X is also not strongly causal, recall that a Lorentzian pre-length space X is called strongly causal if the Alexandrov topology, generated by
agrees with the metric topology [42, Definitions 2.4 and 2.35].
The Alexandrov topology of the above example is generated by the open horizontal stripes, hence is strictly coarser than the Euclidean topology, and X is therefore not strongly causal.
3.1 Proof of Theorem 3.2
We follow Minguzzi’s proof for smooth spacetimes [50]. A key element is the following theorem from utility theory, a branch of mathematical economics with resemblances to causality theory.
Theorem 3.4
(Levin’s Theorem [44]). Let X be a second countable, locally compact Hausdorff topological space and R be a closed preorder on X. Then there exists a continuous function \(f: X \rightarrow \mathbb {R}\) such that
with equality if and only if \(x=y\).
That K-causality implies the existence of a time function is a direct consequence of Levin’s Theorem, and is in fact true in an even more general setting than ours, as already pointed out by Minguzzi [51].
It remains to show the converse. The next lemma gives us a more explicit characterization of the K-relation. Its proof is not significantly different to its smooth counterpart [50, Lemma 3], but is included for the sake of clarity.
Lemma 3.5
Let \((X,d,\ll ,\le ,\tau )\) be a non-totally imprisoning, locally compact Lorentzian pre-length space with limit curves. If \((p,q) \in K^+\subseteq X \times X\), then either \(p \le q\) or for every relatively compact open set B containing p, there exists \(r \in \partial B\) such that \(p < r\) and \((r,q) \in K^+\).
Proof
For the purposes of this proof, it will be more convenient to denote relations as subsets of \(X \times X\); in particular, \(J^+:= \{ (p,q) \in X \times X \mid p \le q \}\). Consider the relation
Clearly, \(J^+ \subseteq R^+ \subseteq K^+\). We will show that \(R^+\) is closed and transitive, which then implies \(R^+=K^+\), and in turn proves the Lemma. Transitivity can be proven exactly in the same way as in the smooth case, so we refer to [50, Lemma 3].
To show closedness of \(R^+\), consider \((p_n,q_n) \rightarrow (p,q)\) with \((p_n,q_n) \in R^+\) for all \(n \in \mathbb {N}\). If \(p=q\) then \((p,q) \in J^+ \subseteq R^+\). We can therefore assume that \(p \ne q\) and it remains to be shown that \((p,q) \in R^+\) as well. Let B be an open relatively compact neighborhood of p. For sufficiently large n, \(p_n \ne q_n\) and \(p_n \in B\). By passing to a subsequence if necessary, we can assume that either \((p_n,q_n) \in J^+\) (case 1) or \((p_n, q_n) \in R^+ \setminus J^+\) (case 2) for all \(n \in \mathbb {N}\):
-
1.
Suppose \((p_n,q_n) \in J^+\) for all \(n \in \mathbb {N}\). By assumption X is causally path-connected (and \(p_n \ne q_n\)); thus, there exist future-directed causal curves \(\gamma _n :[0,1] \rightarrow X\) from \(p_n\) to \(q_n\). By passing to a subsequence if necessary, we can assume that \(\gamma _n\) either lies entirely in \(\overline{B}\) for all n, or leaves \(\overline{B}\) for all n. If all the \(\gamma _n\) lie inside \(\overline{B}\), then by non-total imprisonment their lengths (and by linear reparametrization also their Lipschitz constants) are bounded above by a positive constant C independent of n. Thus, we are in conditions to apply Theorem 2.13, which shows the existence of a limit causal curve connecting p and q, and hence \((p,q) \in J^+ \subseteq R^+\). If, on the other hand, none of the \(\gamma _n\) lie entirely inside \(\overline{B}\), then there is a first parameter value \(s_n\) at which \(\gamma _n\) leaves B (and \(\gamma _n(s_n) \in \partial B\) by connectedness). Define a new sequence of curves \(\tilde{\gamma }_n:= \gamma _n \vert _{[0,s_n]}\). Linear reparametrization so that \(\tilde{\gamma }_n :[0,1]\rightarrow X\) together with Theorem 2.13 shows the existence of a limit causal curve that connects p with a point \(r = \lim _{n \rightarrow \infty } \gamma _n(s_n) \in \partial B\) (again w.l.o.g. by passing to a subsequence). Because \(\gamma _n(s_n)\le q_n\) for all n it follows that \((r,q) \in \overline{J^+} \subseteq K^+\) by closedness of the K-relation. Since also \(p < r\), we again conclude that \((p,q) \in R^+\).
-
2.
Suppose \((p_n,q_n) \in R^+ {\setminus } J^+\) for all n. Then there exist points \(r_n \in \partial B\) such that \(p_n < r_n\) and \((r_n,q_n) \in K^+\). By passing to a subsequence if necessary, we can assume that \(r_n \rightarrow r \in \partial B\). Arguing as in case 1 (for the sequence \((p_n,r_n)\)), either \(p < r\), or there exists \(r' \in \partial B\) such that \(p < r'\) and \((r',r) \in \overline{J^+} \subseteq K^+\). Combining this with the fact that \((r,q) \in K^+\) by closedness of the K-relation, it follows that \((p,q) \in R^+\).
In both cases we have thus shown that \((p,q) \in R^+\), which concludes the proof. \(\square \)
The next and final lemma is key and tells us that time functions are K-utilities, in the language of economics. In other words, a time function with respect to the causal relation \(\le \) is automatically also a time function with respect to the \(K^+\)-relation.
Lemma 3.6
Let \((X,d,\ll ,\le ,\tau )\) be a locally compact Lorentzian pre-length space with limit curves and \(t:X \rightarrow \mathbb {R}\) be a time function. If \((p,q) \in K^+\), then either \(p = q\) or \(t(p) < t(q)\).
Proof
The proof is the same as the one of [50, Lemma 4], replacing [50, Lemma 2] and [50, Lemma 3] by our Lemmas 2.29 and 3.5, respectively. \(\square \)
Proof of Theorem 3.2
That K-causal spaces admit time functions is a direct consequence of Levin’s Theorem 3.4. Conversely, if X admits a time function, then the \(K^+\)-relation must be antisymmetric, as otherwise it would contradict Lemma 3.6. \(\square \)
Remark 3.7
It is worth pointing out that, throughout this section, we have not made use of the chronological relation \(\ll \), nor of timelike curves. Hence, Theorem 3.2 is still valid if in Definition 2.6 we only require the existence of causal (and not of timelike) curves, or even if \(\ll \) is empty.
4 Volume Time Functions
In this section we introduce and explicitly construct special types of functions, called averaged volume functions, on Lorentzian pre-length spaces that are equipped with probability measures. While the existence of a suitable measure solely depends on the topology (in fact, the metric structure) it is the causal structure that determines whether these functions are time functions. More precisely, we will see that the averaged volume functions are time functions if and only if the underlying Lorentzian pre-length space is causally continuous in Theorem 4.13 (see Theorem 1.2 for the Lorentzian length space version thereof).
Our results generalize a classical theorem of Dieckmann [21, 23] (also stated earlier by Hawking and Sachs [37], but with an incomplete proof). Volume functions had already been introduced earlier by Geroch [31, Sect. 5] to study global hyperbolicity; we will replicate those results in Sect. 5. In this section, we follow the approach of Dieckmann, but also make use of an averaging procedure similar to that used by Hawking [35] to study stable causality and time functions. Besides that, our methods in this section are based on order- and measure-theoretical arguments, and we do not need to assume the existence of causal curves.
4.1 Averaged Volume Functions
To construct averaged volume functions on a Lorentzian pre-length space X, we equip X with a Borel measure \(\mu \) satisfying
-
(i)
\(\mu (X)=1\), i.e., \(\mu \) is a probability measure, and
-
(ii)
\({\text {supp}}(\mu ) = X\), i.e., \(\mu \) has full support.
When X is finite, the construction of \(\mu \) is trivial. Otherwise such a measure exists precisely when (X, d) is a separable metric space (which is automatically satisfied for all compact spaces).
Proposition 4.1
A metric space (X, d) admits a Borel probability measure \(\mu \) with \({\text {supp}}(\mu ) = X\) if and only if it is separable (equivalently, second-countable).
Proof
Suppose (X, d) is separable. Then it contains a countable dense subset \(D= \{p_n \mid n \in \mathbb {N}\}\). Denote by \(\delta _n\) the Dirac delta measure centered at \(p_n\), and define
The measure \(\mu \) has the desired properties since (i) \(\mu (X) = \sum _n 2^{-n}=1\) and (ii) for all open sets A, \(A \cap D \ne \emptyset \) by denseness and hence \(\mu (A) > 0\). The proof of the converse can be found in [47, p. 134].
Finally, secound countability implies separability, and on metric spaces the two notions in fact are equivalent. \(\square \)
Let \((X,d,\ll ,\le ,\tau )\) be a Lorentzian pre-length space equipped with a Borel probability measure \(\mu \) of full support. For \(r \in (0,1)\) and \(p \in X\), let
We call \(I^\pm _r(p)\) the r-thickening of \(I^\pm (p)\), as depicted in Fig. 2, and \(V^\pm _r(p)\) its volume.

The sets \(I^-(p)\) (dark blue) and \(I^-_r(p)\) (light and dark blue) for some point p in Minkowski spacetime, with d the Euclidean distance
Definition 4.2
Let \((X,d,\ll ,\le ,\tau )\) be a Lorentzian pre-length space equipped with a Borel probability measure \(\mu \) of full support. The future (\(+\)) and past (−) averaged volume functions of \(\mu \) are defined by
Note that the integral exists for all points \(p \in X\) because the function \(r \mapsto V^\pm _r(p)\) is increasing and bounded.
Remark 4.3
(Comparison to previous definitions of volume functions). The classical definition of a volume function by Geroch [31, Sect. 5] is simpler and reads \(t_\textrm{cl}^\pm (p) = \mp \mu \left( I^\pm (p)\right) \). However, it was discovered by Dieckmann [23, Def. 1.2] that in order to show continuity, one has to require that \(\mu \) also satisfies the property (iii) \(\mu (\partial I^\pm (p)) = 0\). On a smooth spacetime (M, g) one can always construct such an admissible measure \(\mu \) from the volume form using a partition of unity and utilize that \(\partial I^\pm (p)\) is a hypersurface having zero Lebesgue measure in charts [23, Prop. 1.1]. Since we do not have a manifold structure and the Lebesgue measure at our disposal, we instead integrate over r to “average out” discontinuities, hence the addition of “averaged” in the naming of volume functions in Definition 4.2. This averaging procedure is inspired by the work of Hawking [35] on stable causality and time functions.
Remark 4.4
(\(\mu \)-dependence). It is clear that the above constructions of \(I^\pm _r\), \(V^\pm _r\), and \(t^\pm \) depend crucially on the choice of d and \(\mu \). We will, however, see that the existence of (generalized) time functions is at this point independent of the particular choice of \(\mu \) and also of d (as long as the metric is second countable). More precisely, whether the averaged volume functions \(t^\pm \) are indeed (continuous) time functions depends only on the causal structure of X.
We end this subsection by proving that \(t^\pm \) are isotone or causal functions (see [52, Def. 1.17]), a property that is weaker than being a time function.
Lemma 4.5
Let X be a Lorentzian pre-length space as in Definition 4.2 and let \(p,q \in X\). If \(p \le q\), then \(V^-_r(p) \le V^-_r(q)\) and \(V^+_r(p) \ge V^+_r(q)\). In particular,
Proof
By the push-up Lemma 2.3, \(p \le q\) implies \(I^-(p) \subseteq I^-(q)\), and hence \(I^-_r(p) \subseteq I^-_r(q)\) for all \(r \in (0,1)\). The first conclusion thus follows from the monotonicity of \(\mu \), and the second one from the monotonicity of the integral. \(\square \)
4.2 Averaged Volume Functions as Generalized Time Functions
Finally, in order to show that \(t^\pm \) are generalized time functions we need to apply the standard distinguishing causality condition, or at least our own weaker version thereof.
Definition 4.6
[41, p. 486]. Let \((X,d,\ll ,\le ,\tau )\) be a Lorentzian pre-length space. We say that
-
(i)
X is past-distinguishing if
$$\begin{aligned}I^-(p) = I^-(q) \Longrightarrow p=q, \quad p,q \in X,\end{aligned}$$ -
(ii)
X is future-distinguishing if
$$\begin{aligned}I^+(p) = I^+(q) \Longrightarrow p=q, \quad p,q \in X.\end{aligned}$$
We call X distinguishing if it is both past- and future-distinguishing.
Definition 4.7
We say that X is causally (past- or future-) distinguishing if the conditions of Definition 4.6 are only required to hold for all \(p,q \in X\) with \(p \le q\).
Furthermore, we assume that the Lorentzian pre-length spaces are approximating (see Sect. 2.3). This avoids the pathological situation where the future or past of a point could be “far away” from the point itself, or empty.
Having equipped our spaces with sufficient causal and topological conditions, we are in a position to establish the well-known classical result about generalized time functions [23, Prop. 2.2] also for separable Lorentzian pre-length spaces (for which averaged volume functions \(t^\pm \) from Definition 4.2 are well-defined by Proposition 4.1).
Proposition 4.8
Let \((X,d,\ll ,\le ,\tau )\) be a past-(future-)approximating Lorentzian pre-length space equipped with a Borel probability measure of full support. Then X is causally past-(future-)distinguishing if and only if \(t^-\) (\(t^+\)) is a generalized time function i.e., for all \(p,q \in X\)
Proof
We prove the past version. If X is causally past-distinguishing, then for all \(p,q \in X\) with \(p<q\),
Clearly, \(q \not \in I^-(p)\), because \(q \in I^-(p)\) would imply \(I^-(q) \subseteq I^-(p) \subsetneq I^-(q)\), a contradiction. We show that also \(q \not \in \partial I^-(p)\): For any \(x \in I^{-}(q)\) the future \(I^+(x)\) is open and thus contains an open set V around q. If \(q \in \partial I^-(p)\), then there is a point \(y \in V \cap I^-(p)\); thus, \(x \ll y \ll p\) and by transitivity \(x \in I^-(p)\). Therefore, \(I^-(q) \subseteq I^-(p)\), a contradiction.
Since any metric space is normal, the disjoint closed sets \(\{q\}\) and \(\overline{I^-(p)}\) can be separated by disjoint open sets. In particular, there exists an open neighborhood U around q such that \(r_0:= d(U,I^-(p)) >0\). The intersection \(U \cap I^-(q)\) is open, and by the past-approximating property of X at q (see Lemma 2.18) also non-empty. Thus, since \(U \cap I^-(q) \subseteq I_r^-(q) {\setminus } I_r^-(p)\) for all \(r<r_0\),
To prove the converse, assume that for all \(p<q\) we have \(t^-(q)-t^-(p) > 0\). In order to show that X is causally past-distinguishing, furthermore assume that \(I^-(p) = I^-(q)\) and \(p \le q\). Then \(I^-_r(p) = I^-_r(q)\) for all \(r \in [0,1]\), and therefore \(t^-(p)=t^-(q)\). Hence, \(p=q\). \(\square \)
Example 3.3 is a Lorentzian pre-length space that is causally distinguishing but not distinguishing (any two points on the same level set of t have the same past, but are not causally related to one another). One can show that under certain conditions the two notions agree, in particular, for smooth spacetimes.
Proposition 4.9
Let \((X,d,\ll ,\le ,\tau )\) be a locally compact, causally path-connected, locally weakly causally closed, (past-/future-)approximating Lorentzian pre-length space. If X is causally (past-/future-)distinguishing, then it is also (past-/future-)distinguishing.
Proof
Suppose X is causally past-distinguishing but not past-distinguishing (the future case is analogous). Then there exist two distinct points \(p,q \in X\) such that \(I^-(p) = I^-(q)\). By Lemma 2.18 there is a sequence \((p_n^-)_n\) that approximates p from the past. Because \(p_n^- \in I^-(p) = I^-(q)\) and X is causally path-connected, there exists a sequence of causal curves \((\gamma _n)_n\) connecting \(p_n^-\) and q. Let \(\delta \) be small enough so that \(B_\delta (p)\) is compact and does not contain q. Consider the sequence of points \((r_n)_n\) where \(\gamma _n\) first intersects \(\partial B_{\delta /2}(p)\). By compactness, we may assume it converges to a point \(r \in \partial B_{\delta /2}(p)\). Without loss of generality, suppose that \(B_\delta (p)\) is contained in a weakly causally closed neighborhood, and so furthermore \(p \le r\) and \(I^-(p) \subseteq I^-(r)\) by the push-up Lemma 2.3. Moreover, by openness of \(\ll \) we have \(I^-(r) \subseteq \bigcup _n I^-(r_n)\), and since \(r_n \ll q\), by transitivity we have \(I^-(r_n)\subseteq I^-(q)\). Hence, \(I^-(p) \subseteq I^-(r) \subseteq I^-(q)\), which together with our initial assumption \(I^-(p)=I^-(q)\) implies that \(I^-(p) = I^-(r)\). Since X is causally past-distinguishing, we thus know that \(p=r\), which contradicts the fact that \(d(p,r)=\frac{\delta }{2}>0\). Thus, X must indeed also be past-distinguishing. \(\square \)
4.3 Continuity of Averaged Volume Functions
We conclude this section by generalizing the equivalence between causal continuity and the continuity of volume functions (shown in the smooth case by Dieckmann [23, Proposition 2.5]) to establish when \(t^\pm \) of Definition 4.2 are time functions.
Definition 4.10
Let \((X,d,\ll ,\le ,\tau )\) be a Lorentzian pre-length space. If for all \(p,q \in X\),
-
(i)
\(I^+(p) \subseteq I^+(q)\) implies \(I^-(q) \subseteq I^-(p)\), we say that X is past reflecting.
-
(ii)
\(I^-(p) \subseteq I^-(q)\) implies \(I^+(q) \subseteq I^+(p)\), we say that X is future reflecting.
If X is both past and future reflecting, we say that it is reflecting.
We define causal continuity as in the smooth case. Aké et al. showed that this notion of causal continuity implies strong causality [1, Proposition 3.15], as it does in the smooth case. However, it turns out that the optimal condition for our Theorem 4.13 is a weaker version thereof. This weaker version is not (trivially) sufficient for the results of Aké et al. to still hold. In any case, both definitions are equivalent when the conditions of Proposition 4.9 are met (in particular, in the smooth case).
Definition 4.11
[1, Definition 3.9]. A Lorentzian pre-length space is called causally continuous if it is reflecting and distinguishing.
Definition 4.12
A Lorentzian pre-length space is called weakly causally continuous if it is reflecting and causally distinguishing.
Using this terminology, we can state the main result of this section (see Theorem 1.2 for the corresponding Lorentzian length space version).
Theorem 4.13
Let X be an approximating Lorentzian pre-length space equipped with a Borel probability measure of full support. Then X is weakly causally continuous if and only if the averaged volume functions \(t^\pm \) are time functions.
Note that also in this section we combine a topological condition (second countable) and a causal condition ((weakly) causally continuous) to characterize the existence of volume time functions.
Proof
By Proposition 4.8 the averaged volume functions are generalized time functions if and only if X is causally distinguishing. In Lemma 4.16 below we show that their continuity is characterized by X being reflecting. \(\square \)
First, we show that property (iii) discussed in Remark 4.3 holds for almost all thickenings of \(I^\pm (p)\).
Lemma 4.14
Let \((X,d,\ll ,\le ,\tau )\) be a Lorentzian pre-length space equipped with a Borel probability measure \(\mu \) of full support. For \(p \in X\) consider the functions \(r \mapsto V^\pm _r(p) = \mu (I^\pm _r(p))\) as defined in Sect. 4.1 and
Then the sets
are countable in (0, 1) for all \(p \in X\).
Proof
Let \(p \in X\). By definition and additivity of \(\mu \), we have
Hence, we can rewrite \(S^\pm (p)\) as
To see that \(S^\pm (p)\) is countable, consider the sets
for \(n \in \mathbb {N}\). We show that \(|S_n^\pm (p)| \le n\). Otherwise there would exist at least \(n+1\) distinct \(r_i \in S_n^\pm (p)\). Since all \(\partial I^\pm _{r_i}(p)\) are disjoint, this would imply that
a contradiction. Finally, because \(S^\pm (p) = \bigcup _{n\in \mathbb {N}} S_n^\pm (p)\), we deduce that the sets \(S^\pm (p)\) are countable for any \(p \in X\). \(\square \)
In addition to Lemma 4.14, the continuity of the averaged volume functions rests on the following general result which is based on Lebesgue’s dominated convergence theorem (in [39] formulated for \(X=\mathbb {R}^d\) but true for all sequential spaces).
Theorem 4.15
[39, Theorem 16.10]. Let (X, d) be a metric space, \(U \subseteq X\) and \(y_0 \in U\). Consider a function \(f :\mathbb {R}^n \times U \rightarrow \mathbb {R}\cup \{ \pm \infty \}\). Assume that
-
(i)
for every fixed \(y \in U\) the function \(x \mapsto f(x,y)\) is integrable,
-
(ii)
for almost all \(x \in \mathbb {R}^n\) the function \(y \mapsto f(x,y)\) is continuous at \(y_0\),
-
(iii)
there exists an integrable function \(F :\mathbb {R}^n \rightarrow \mathbb {R}\cup \{+\infty \}\) with the property that for every \(y \in U\),
$$\begin{aligned} |f(x,y)| \le F(x) \end{aligned}$$holds almost everywhere on \(\mathbb {R}^n\).
Then the function
is continuous at the point \(y_0\).
With this, we can prove the last lemma of this section (compare with [23, Proposition 1.6]). Together with Proposition 4.8, it constitutes the proof of Theorem 4.13.
Lemma 4.16
Let \((X,d,\ll ,\le ,\tau )\) be an approximating Lorentzian pre-length space equipped with a Borel probability measure \(\mu \) of full support. For any point \(q \in X\), the following are equivalent:
-
(i)
\(t^-\) (\(t^+\)) is continuous at q.
-
(ii)
\(I^+(q) \subseteq I^+(p) \implies I(\tilde{p},p) \cap I^-(q) \ne \emptyset \) for all \(\tilde{p} \ll p\) (\(I^-(q) \subseteq I^-(p) \implies I(p,\tilde{p}) \cap I^-(q) \ne \emptyset \) for all \(p \ll \tilde{p}\)).
-
(iii)
X is past (future) reflecting at q.
-
(iv)
\(\bigcap _{q \ll x} I^-(x) \subseteq \overline{I^-(q)}\) (\(\bigcap _{x \ll q} I^+(x) \subseteq \overline{I^+(q)}\)).
Proof
We show the past versions. Fix \(q \in X\).
(i) \(\Longrightarrow \) (ii) Assume (i) holds but not (ii). Then there exist points p and \(\tilde{p}\) such that \(\tilde{p} \ll p\) and \(I^+(q) \subseteq I^+(p)\) but \(I(\tilde{p},p) \cap I^-(q) = \emptyset \). Note that \(I(\tilde{p}, p)\) is open and non-empty, because we can approximate p from the past, and by openness of \(\ll \), any past-approximating sequence must enter \(I^+(\tilde{p})\). Let \(r_0 > 0\) be small enough, then also the set
is open and non-empty: If not, then \(I(\tilde{p},p) \subseteq \overline{I^-_{r_0}(q)}\). But since \(I(\tilde{p},p)\) is open, this would mean that \(I(\tilde{p},p) \cap I^-(q) \ne \emptyset \), contradicting our earlier assumption. Clearly, \(B \cap I_{r}^-(q) = \emptyset \) for all \(r < r_0\).
Let \((q_n^+)\) be a sequence approximating q from the future. Since \(q_n^+ \in I^+(q) \subseteq I^+(p)\), transitivity of \(\ll \) implies that \(I(\tilde{p},p) \subseteq I^-(p) \subseteq I^-(q_n^+)\). Then, because
and \(B \subseteq I^-_r(q_n^+) \setminus I^-_r(q)\) for \(r<r_0\), it follows that
showing discontinuity of \(t^-\) at q, a contradiction to (i).
(ii) \(\Longrightarrow \) (iii) Assume (ii) holds but not (iii). If X is not past reflecting at q, then there exists a \(p \in X\) with \(I^+(q) \subseteq I^+(p)\) but \(I^-(p) \not \subseteq I^-(q)\). Thus, there is a \(\tilde{p} \in I^-(p) \setminus I^-(q)\) and by (ii) there exists a point \(\hat{p} \in I(\tilde{p},p) \cap I^-(q)\). But then \(\tilde{p} \ll \hat{p} \ll q\), and by transitivity \(\tilde{p} \ll q\), a contradiction.
(iii) \(\Longrightarrow \) (iv) If \(\bigcap _{q\ll x} I^-(x) = \emptyset \) the conclusion is trivial. Suppose \(p \in \bigcap _{q \ll x} I^-(x)\). Then \(x \in I^+(p)\) for all \(x \gg q\), i.e., \(I^+(q) \subseteq I^+(p)\). By (iii) X is past reflecting at q, hence \(I^-(p) \subseteq I^-(q)\). Since X is past-approximating, \(p \in J^-(p) \subseteq \overline{I^-(p)} \subseteq \overline{I^-(q)}\). Since p was an arbitrary point in the intersection, (iv) follows.
(iv) \(\Longrightarrow \) (i) Fix \(r \in (0,1)\) and let \(\epsilon > 0\). Because X is past-approximating, we can find a sequence \((q^-_i)_i\) that approximates q from the past. By openness of \(\ll \), it then follows that
and by standard measure theory [40, Theorem 1.2.5] there exists \(i_0 \in \mathbb {N}\), such that
By Lemma 4.5, we deduce
Next, consider \((q^+_j)_j\) a sequence approximating q from the future. Assumption (iv) implies that
and hence
By [40, Theorem 1.2.5], for r given, there exists \(j_0 \in \mathbb {N}\) such that
Then, using Lemma 4.5 we deduce
By Lemma 4.14, \(\overline{V^-_r}(q) = {V^-_r}(q)\) for all but countably many r. Hence, for almost all \(r\in (0,1)\), we can combine (1) and (2) to write
We conclude that almost all functions \(V^-_r :X \rightarrow \mathbb {R}\), \(r \in (0,1)\), are continuous at q. Thus, it follows from Theorem 4.15 that
is continuous at q. \(\square \)
5 Global Hyperbolicity and Cauchy Time Functions
The highest step on the causal ladder, namely global hyperbolicity, is fundamental for a number of deep and important results in general relativity, such as the study of the Cauchy problem of the Einstein equations, the singularity theorems, and Lorentzian splitting theorems. This is due to the fact global hyperbolicity is equivalent to the existence of a Cauchy time function, whose level sets in turn are Cauchy surfaces, i.e., domains suitable for specifying initial data for hyperbolic PDEs, and for imposing focusing conditions for geodesics. This characterization of global hyperbolicity was first obtained by Geroch [31] in 1970 and makes use of volume time functions. In the same vein, in this section we characterize global hyperbolicity for Lorentzian pre-length spaces in four different ways by also utilizing our constructions from Sect. 4.
5.1 Definitions and Main Result
The causality conditions we use for Lorentzian pre-length space are defined analogously to the smooth case as follows (cf. [52]).
Definition 5.1
[42, Definition 2.35]. A Lorentzian pre-length space \((X,d,\ll , \le , \tau )\) is called globally hyperbolic if it is non-totally imprisoning and the causal diamonds J(p, q) are compact for all \(p,q \in X\).
Definition 5.2
A time function \(t :X \rightarrow \mathbb {R}\) on a Lorentzian pre-length space \((X,d,\ll ,\le ,\tau )\) is called a Cauchy time function if for every doubly inextendible causal curve \(\gamma \) we have \({\text {Im}}(t \circ \gamma ) = \mathbb {R}\).
For smooth and continuous Lorentzian metrics, global hyperbolicity is also characterized by the existence of a Cauchy surface, which is then a topological (even smooth) hypersurface. We extend the definition verbatim, but adopt the name Cauchy set to emphasize that we are not in the manifold setting.
Definition 5.3
Let \((X,d,\ll ,\le ,\tau )\) be a Lorentzian pre-length space. A Cauchy set is a subset \(\mathcal {S}\subseteq X\) such that every doubly inextendible causal curve intersects \(\mathcal {S}\) exactly once.
Geroch [31, Sect. 4] makes use of Leray’s notion of global hyperbolicity which is formulated in terms of the topology on the collection of certain curves. We will show that Definition 5.1 is equivalent to this notion also for Lorentzian pre-length spaces. To this end, for any two points \(p,q \in X\), we consider the set \(\mathcal {C}(p,q)\) the equivalence class of future-directed causal curves from p to q with continuous, strictly monotonically increasing reparametrizations, equipped with the Hausdorff distance between the images of the curves as subsets in X, i.e.,
(we write \(\gamma _i\) also for the image \({\text {Im}}(\gamma _i)\), since the parametrization does not matter).
In this section we establish the third, and last, main result of this paper (which via Proposition 2.20 immediately implies the Lorentzian length version stated in Theorem 1.3 of the Introduction).
Theorem 5.4
Let \((X,d,\ll ,\le ,\tau )\) be an approximating Lorentzian pre-length space with limit curves. Suppose, in addition, that (X, d) is second countable and proper. Then the following are equivalent:
-
(i)
X is globally hyperbolic,
-
(ii)
X is non-totally imprisoning and \(\mathcal {C}(p,q)\) is compact, for any \(p,q \in X\),
-
(iii)
X admits a Cauchy time function,
-
(iv)
X admits a Cauchy set.
Remark 5.5
(Smooth spacetimes). Manifolds are second-countable by definition. Moreover, any differentiable manifold admits a complete Riemannian metric [57], and hence, by the Hopf–Rinow Theorem, a proper distance. For spacetimes with continuous metrics, however, Theorem 5.4 cannot be applied unrestrictedly, since only causally plain \(C^0\)-spacetimes satisfy the axioms of Lorentzian pre-length spaces [42, Example 5.2] (but a characterization of global hyperbolicity on all \(C^0\)-spacetimes has been obtained in [60]). On the other hand, Theorem 5.4 is of course valid well beyond the manifold setting. For instance, by the Hopf–Rinow–Cohn-Vossen Theorem it is sufficient that (X, d) is a complete, locally compact length metric space for it to be proper.
Remark 5.6
(Topology change). On a spacetime (M, g), if \(\mathcal {S}\) is a smooth Cauchy surface, then any other Cauchy surface is diffeomorphic to \(\mathcal {S}\) [7] (similarly, if one works with continuous Cauchy surfaces, then they are homeomorphic). The diffeomorphism can be constructed by following the flow of the time-orientation vector field. Further, M is foliated by Cauchy surfaces.
For Lorentzian pre-length spaces X, it is still true that in the setting of Theorem 5.4 the level sets of Cauchy time functions yield a decomposition of X as a disjoint union of Cauchy sets. Different Cauchy sets, however, need not be homeomorphic, nor even homotopy equivalent as the next examples show.
Example 5.7
(Degenerate subsets of Minkowski space). Let \((M,\eta )\) be \((n+1)\)-dimensional Minkowski spacetime, with coordinates \((t,x) \in \mathbb {R}\times \mathbb {R}^n\) and \(n \ge 2\). Define
(here \(\vert x \vert \) denotes the Euclidean norm of \(x\in \mathbb {R}^n\)), equipped with the causal and chronological relations induced by \(\eta \) and the Euclidean distance. Then X is a globally hyperbolic Lorentzian pre-length space and satisfies the assumptions of Theorem 5.4. The function \(f(t,x) = t\) is a Cauchy time function, with some of its level sets being points (if \(t\le 0\)) and some being \((n-1)\)-spheres (if \(t>0\)).
Example 5.8
(Degenerate generalized cones). If \((X_1,d_1)\), \((X_2,d_2)\) are separable, proper geodesic length spaces one can construct generalized cones \(Y_1\) and \(Y_2\) in the sense of [2] over them and glue them together at the tip. The resulting space can be equipped with the structure of a Lorentzian length space in the usual way, which is then globally hyperbolic by [2, Prop. 4.10], and has Cauchy sets homeomorphic to \(X_1\), \(X_2\) and \(\{ \text {tip} \}\).
5.2 Properties of Cauchy Sets
In what follows, we prove several results involving Cauchy sets that are crucial in the proof of Theorem 5.4 for the implication (iv) \(\Longrightarrow \) (ii), but are also of independent interest. We make use of several results about inextendible causal curves, in particular, about the existence of a maximal extension of causal curves obtained in Sect. 2.1.
Proposition 5.9
(Basic properties of Cauchy sets). Let \((X,d,\ll ,\le ,\tau )\) be an approximating Lorentzian pre-length space with limit curves such that (X, d) is proper. If \(\mathcal {S}\subseteq X\) is a Cauchy set, then the following properties hold:
-
(i)
\(\mathcal {S}\) is acausal, i.e., distinct points on \(\mathcal {S}\) are not causally related,
-
(ii)
\(X = J^-(\mathcal {S}) \cup J^+(\mathcal {S})\),
-
(iii)
\(X = I^-(\mathcal {S}) \sqcup \mathcal {S}\sqcup I^+(\mathcal {S})\), where \(\sqcup \) denotes the disjoint union,
-
(iv)
\(J^\pm (\mathcal {S}) = \overline{I^\pm (\mathcal {S})} = I^\pm (\mathcal {S}) \sqcup \mathcal {S}\), and \(\mathcal {S}\) and \(J^\pm (\mathcal {S})\) are closed.
Proof
(i) Suppose \(p < q\) and \(p,q \in \mathcal {S}\). Then by causal path-connectedness, there exists a causal curve \(\gamma :[a,b] \rightarrow X\) from p to q. By Proposition 2.22 there exists a maximal doubly inextendible extension \(\lambda \) of \(\gamma \), which therefore intersects \(\mathcal {S}\) more than once, a contradiction to \(\mathcal {S}\) being a Cauchy set.
(ii) Let \(p \in X\). By Corollary 2.23, there exists a doubly inextendible causal curve \(\gamma \) through p. Since \(\mathcal {S}\) is a Cauchy set, it intersects \(\gamma \) exactly once, say at \(\gamma (0)\). Hence, \(p \le \gamma (0)\) or \(\gamma (0) \le p\).
(iii) Let \(p \in X\). By Lemma 2.19, we can assume that the curve \(\gamma \) in (ii) is timelike in a neighborhood of p. Then, if \(p \le \gamma (0)\), we have either \(p = \gamma (0) \in \mathcal {S}\) or \(p \ll \gamma (-\epsilon ) < \gamma (0)\) for some \(\epsilon > 0\), which then by the push-up Lemma 2.3 implies \(p \ll \gamma (0)\). Applying the same argument in the case \(\gamma (0) \le p\), we conclude that \(p \in I^-(\mathcal {S}) \cup \mathcal {S}\cup I^+(\mathcal {S})\).
It remains to be shown that the union is disjoint. Since \(\mathcal {S}\) is acausal by (i) and the push-up property it is clear that \(\mathcal {S}\) and \(I^\pm (\mathcal {S})\) are disjoint. Moreover, \(I^+(\mathcal {S})\) and \(I^-(\mathcal {S})\) are disjoint since otherwise, there exists a causal curve that intersects \(\mathcal {S}\) at two different points or is closed timelike (if the points coincide), and hence contradicts \(\mathcal {S}\) being Cauchy.
(iv) The sets \(I^\pm (\mathcal {S}) = \bigcup _{p \in \mathcal {S}} I^\pm (p)\) are unions of open sets and hence open. By (iii) is \(\mathcal {S}= X {\setminus } (I^-(\mathcal {S}) \sqcup I^+(\mathcal {S}))\) the complement of open sets and thus closed. By the same argument is \(X {\setminus } I^\mp (\mathcal {S}) = I^\pm (\mathcal {S}) \sqcup \mathcal {S}\) closed, and hence
where the last inclusion is due to the assumption that X is approximating. Thus, \(I^\pm (\mathcal {S}) \sqcup \mathcal {S}= J^\pm (\mathcal {S}) = \overline{I^\pm (\mathcal {S})}\), and hence closed. \(\square \)
Closedness of Cauchy sets, in particular, will be key in establishing (iv) \(\Longrightarrow \) (ii) of Theorem 5.4. In the remaining lemmas of this subsection we prove this implication in steps.
Lemma 5.10
Let \((X,d,\ll ,\le ,\tau )\) be an approximating Lorentzian pre-length space with limit curves. Suppose, in addition, that (X, d) is proper. If X contains a Cauchy set \(\mathcal {S}\), then X is non-totally imprisoning.
Proof
Suppose X is not non-totally imprisoning. Then by Theorem 2.27, there is a compact set \(K \subseteq X\) and a doubly inextendible future-directed causal curve \(\gamma :\mathbb {R}\rightarrow K\). By Definition 5.3 we know that, without loss of generality, \(\gamma \cap \mathcal {S}= \{\gamma (0)\}\).
First, we show that \(\tilde{\gamma }:= \gamma \vert _{[1,\infty )}\) must come arbitrarily close to \(\mathcal {S}\), that is, there exist parameter values \(s_n\) such that \(d(\tilde{\gamma }(s_n),\mathcal {S}) < 1/n\), for all \(n \in \mathbb {N}\). Suppose this is not the case: then there exists a \(\delta \) such that \(d(\tilde{\gamma }(s),\mathcal {S}) > \delta \) for all \(s \in [1,\infty )\), and hence, \(\tilde{\gamma }\) is contained in the compact set \(K {\setminus } \mathcal {S}_\delta \), where \(\mathcal {S}_\delta := \{ x \in X \mid d(x,\mathcal {S}) < \delta \}\). But then, since \(\tilde{\gamma }\) is future-inextendible, by the proof of Theorem 2.27, there also exists a doubly inextendible causal curve contained in \(K \setminus \mathcal {S}_\delta \), in contradiction to \(\mathcal {S}\) being a Cauchy set. Thus, we conclude that there must exist a sequence \((s_n)_n\) such that \(d(\tilde{\gamma }(s_n),\mathcal {S}) \rightarrow 0\). Moreover, since \(\mathcal {S}\) is closed by Proposition 5.9 (iv), \(K \cap \mathcal {S}\) is compact, and hence \(\left( \tilde{\gamma }(s_n)\right) _n\) converges, up to a subsequence, to some point \(p \in \mathcal {S}\). This implies that \(s_n \rightarrow \infty \), because if \(s_\infty = \lim s_n \in [1,\infty )\), then \(\gamma (s_\infty ) \in \mathcal {S}\), which is not allowed since already \(\gamma (0) \in \mathcal {S}\) and \(\mathcal {S}\) is a Cauchy set.
Having established the existence of a sequence \(s_n \rightarrow \infty \) in \(\mathbb {R}\) such that \(\gamma (s_n) \rightarrow p \in \mathcal {S}\), we may consider the sequence of past-directed causal curves \(\lambda _n: [0,s_n] \rightarrow X\) given by
By Lemma 2.9, \(\gamma \) has infinite arclength, and thus, \(L^d(\lambda _n) \rightarrow \infty \). Since \(\lambda _n(0) \rightarrow p\), we can apply Theorem 2.16 to find a past-directed limit curve \(\lambda : [0,\infty ) \rightarrow X\) with \(\lambda (0) = p\), hence \(\lambda ([0,\infty )) \subseteq J^-(p) \subseteq J^-(\mathcal {S})\). On the other hand, we have that \(\gamma ([0,\infty )) \subseteq J^+(\gamma (0)) \subseteq J^+(\mathcal {S})\), therefore \(\lambda _n([0,s_n]) \subseteq J^+(\mathcal {S})\). By Proposition 5.9(iv), \(J^+(\mathcal {S})\) is closed, so as a limit curve, \(\lambda \) is contained in it. But then \(\lambda ([0,\infty )) \subseteq J^-(\mathcal {S}) \cap J^+(\mathcal {S})\). This is a contradiction since, by Proposition 5.9 (iv), \(J^-(\mathcal {S}) \cap J^+(\mathcal {S}) = \mathcal {S}\), and by Proposition 5.9 (i), Cauchy surfaces are acausal. \(\square \)
Finally, the last two lemmas prove compactness of \(\mathcal {C}(p,q)\). They are adapted from Geroch’s original proof for smooth spacetimes [31]. Similarly to \(\mathcal {C}(p,q)\), we denote by \(\mathcal {C}(p,\mathcal {S})\) the space of future-directed causal curves from a point \(p \in X\) to a Cauchy set \(\mathcal {S}\), equipped with the Hausdorff distance.
Lemma 5.11
Let \((X,d,\ll ,\le ,\tau )\) be an approximating Lorentzian pre-length space with limit curves. Suppose, in addition, that (X, d) is proper. Let \(\mathcal {S}\) be a Cauchy surface in X. Then for all \(p \in X\), the space \(\mathcal {C}(p,\mathcal {S})\) is compact.
Proof
Suppose \(\mathcal {C}(p,\mathcal {S}) \ne \emptyset \), otherwise the statement is trivial. In particular, this means that \(p \in J^-(\mathcal {S})\). The set \(\mathcal {C}(p,\mathcal {S})\) together with the Hausdorff distance \(d_H\) is a metric space, and hence, it remains to prove sequential compactness. Let \((\gamma _n)_n\) be a sequence in \(\mathcal {C}(p,\mathcal {S})\). We distinguish between two cases:
-
1.
There exists a constant \(C>0\) such that \(L^d(\gamma _n) < C\) for all \(n \in \mathbb {N}\). Assume that all \(\gamma _n\) are defined on [0, 1]. Then by Theorem 2.13, a subsequence of \((\gamma _n)_n\) converges uniformly (and thus also with respect to \(d_H\)) to a future-directed causal limit curve \(\gamma :[0,1] \rightarrow X\). Since \(\gamma _n(0) = p\), also \(\gamma (0) = p\). Moreover, \(\gamma _n(1) \in \mathcal {S}\) for all \(n \in \mathbb {N}\), and \(\mathcal {S}\) is closed by Proposition 5.9 (iv), thus also \(\gamma (1) \in \mathcal {S}\). Hence, \(\gamma \in \mathcal {C}(p,\mathcal {S})\).
-
2.
On the other hand, assume that \(L^d(\gamma _n) \rightarrow \infty \) and all \(\gamma _n\) are parametrized by d-arclength. By Theorem 2.16 a subsequence of \((\gamma _n)_n\) converges locally uniformly to a future-inextendible causal limit curve \(\gamma :[0,\infty ) \rightarrow X\). Since \(\gamma _n \subseteq J^-(\mathcal {S})\), and by Proposition 5.9(iv), \(J^-(\mathcal {S})\) is closed, we have \(\gamma \subseteq J^-(\mathcal {S})\). By Proposition 2.22, there exists a doubly inextendible extension \(\tilde{\gamma }:\mathbb {R}\rightarrow X\) of \(\gamma \), which by transitivity of \(\le \) is also contained in \(J^-(\mathcal {S})\). Then \(\tilde{\gamma }\) must intersect \(\mathcal {S}\), say at \(\tilde{\gamma }(s_0)\). This implies that for all \(s > s_0\), \(\gamma (s) \in J^-(\mathcal {S}) \cap J^+(\mathcal {S}) = \mathcal {S}\). Moreover, \(\gamma \vert _{(s_0,\infty )}\) cannot be constant, because then by Lemma 2.9, \(\gamma \) would be future-extendible. Since by Proposition 5.9 (i) \(\mathcal {S}\) is acausal, we arrive at a contradiction. \(\square \)
Lemma 5.12
Let \((X,d,\ll ,\le ,\tau )\) be an approximating Lorentzian pre-length space with limit curves. Suppose, in addition, that (X, d) is proper. If X contains a Cauchy set \(\mathcal {S}\), then \(\mathcal {C}(p,q)\) is compact for all \(p,q \in X\).
Proof
By Lemma 5.10, if X contains a Cauchy set \(\mathcal {S}\), then X is non-totally imprisoning and hence causal. Thus, we may assume without loss of generality that \(p < q\) so that \(\mathcal {C}(p,q)\) is nontrivial. We prove sequential compactness, with \((\gamma _n)_n\) always denoting a sequence in \(\mathcal {C}(p,q)\). In view of Proposition 5.9 (i) and (iii), we can distinguish three cases:
-
1.
\(p \in \mathcal {S}\) and \(q \in I^+(\mathcal {S})\) (or analogously, \(q \in \mathcal {S}\) and \(p \in I^-(\mathcal {S})\)): Then \((\gamma _n)_n\) can be seen as a sequence in \(\mathcal {C}(\mathcal {S},q)\). By Lemma 5.11, there exists a limit curve \(\gamma \) in \(\mathcal {C}(\mathcal {S},q)\). But since \(\gamma _n\) starts at p for all n, also \(\gamma \) must start at p; hence, it is an element of \(\mathcal {C}(p,q)\).
-
2.
\(p,q \in I^+(\mathcal {S})\) (or analogously, \(p,q \in I^-(\mathcal {S})\)): There exists a future-directed timelike curve \(\lambda \) from \(\mathcal {S}\) to p. Construct a new sequence \((\tilde{\gamma }_n)_n\) by concatenating \(\lambda \) with \(\gamma _n\). Then \((\tilde{\gamma }_n)_n\) is a sequence in \(\mathcal {C}(\mathcal {S},q)\) and thus has a causal limit curve \(\tilde{\gamma }\) by Lemma 5.11. Because of how the sequence was constructed, \(\tilde{\gamma }\) must be the concatenation of \(\lambda \) with a causal curve \(\gamma \in \mathcal {C}(p,q)\) which is the Hausdorff limit of \((\gamma _n)_n\).
-
3.
\(p \in I^-(\mathcal {S})\) and \(q \in I^+(\mathcal {S})\): By Proposition 2.22 we can extend each \(\gamma _n\), and the maximal extension must intersect \(\mathcal {S}\) exactly once, say at \(\gamma _n(0)\). Because of Proposition 5.9 (iv), \(\gamma _n(0)\) cannot lie to the past of p nor to the future of q; hence, it must in fact lie on \(\gamma _n\). Consider the sequence \((\bar{\gamma }_n)_n\) where \(\bar{\gamma }_n\) is the restriction of \(\gamma _n\) from p to \(\gamma _n(0)\). By Lemma 5.11 a subsequence \((\bar{\gamma }_{n_k})_k\) converges to a limit curve \(\bar{\gamma }\) in \(\mathcal {C}(p,\mathcal {S})\). Similarly, consider the sequence \((\tilde{\gamma }_{n_k})_k\) of the restrictions of the original curves \(\gamma _{n_k}\) from \(\gamma _{n_k}(0)\) to q. By Lemma 5.11, we may assume it converges to a limit curve \(\tilde{\gamma }\) in \(\mathcal {C}(\mathcal {S},q)\). Since by construction the endpoints of \(\bar{\gamma }\) and \(\tilde{\gamma }\) agree on \(\mathcal {S}\), we can join them to obtain a limit causal curve of (a subsequence of) the original sequence \((\gamma _n)_n\) from p to q. \(\square \)
5.3 Proof of Theorem 5.4
We prove Theorem 5.4 in several steps. The implications (ii) \(\Longrightarrow \) (i) and (iii) \(\Longrightarrow \) (iv) are straightforward. The most involved step (iv) \(\Longrightarrow \) (ii) follows from our results in Sect. 5.2 about properties of Cauchy sets. Finally, for the implication (i) \(\Longrightarrow \) (iii) we show that the averaged volume functions of Sect. 4 have additional properties on globally hyperbolic Lorentzian pre-length spaces.
Proof of Theorem 5.4
(ii) \(\Longrightarrow \) (i) By (ii), X is already non-totally imprisoning, and thus, it remains to be shown that the causal diamonds J(p, q) are compact for all \(p\le q\). If \(p = q\), then \(J(p,q) = \{p\}\) because non-total imprisonment implies causality. Suppose that \(p<q\). Let \((x_n)_n\) be any sequence in J(p, q). By causal path-connectedness of X, every \(x_n\) lies on a causal curve \(\gamma _n :[0,1] \rightarrow X\) from p to q. By (ii), the space of curves \(\mathcal {C}(p,q)\) is compact, and hence, a subsequence \((\gamma _{n_k})_k\) of \((\gamma _n)_n\) converges to a causal curve \(\gamma \in \mathcal {C}(p,q)\) in the Hausdorff sense. In particular, for the corresponding points, \(d(x_{n_k},\gamma ) \rightarrow 0\) as \(k \rightarrow \infty \). Since \(\gamma \) itself is compact, a subsequence of \((x_{n_k})_k\) must converge to a point on \(\gamma \). Hence, J(p, q) is compact.
(iii) \(\Longrightarrow \) (iv) Suppose t is a Cauchy time function. Then the level sets of t are Cauchy sets: For \(s \in \mathbb {R}\) consider the preimage \(\mathcal {S}= t^{-1}(\{ s \})\). Since t is a time function, any future-directed causal curve \(\gamma \) intersects \(\mathcal {S}\) at most once. If \(\gamma \) is furthermore doubly inextendible, and since t is Cauchy, \({\text {Im}}(t \circ \gamma ) = \mathbb {R}\) and thus \(\mathcal {S}\cap \gamma \ne \emptyset \). Hence, doubly inextendible causal curves intersect \(\mathcal {S}\) at exactly one point.
(iv) \(\Longrightarrow \) (ii) Suppose X admits a Cauchy set. By Lemma 5.10, X is non-totally imprisoning. By Lemma 5.12, the set of future-directed causal curves \(\mathcal {C}(p,q)\) between p and q is compact for any \(p,q \in X\).
(i) \(\Longrightarrow \) (iii) Let \(t^\pm \) be given by Definition 4.2 and define
By (i), X is globally is hyperbolic, and thus, it follows immediately from Lemma 5.14 (see below) that t is a Cauchy time function. Note that here we are using the assumption of second countability in order to equip (X, d) with a Borel probability measure of full support (see Proposition 4.1). \(\square \)
We finish the remaining parts of the proof of (i) \(\Longrightarrow \) (iii). By definition, \(I^\pm (p) \subseteq J^\pm (p)\) for all points p in a Lorentzian pre-length space X. If X is approximating, then furthermore \(J^\pm (p) \subseteq \overline{I^\pm (p)}\), and thus, \(\overline{I^\pm (p)} = \overline{J^\pm (p)}\). If X is globally hyperbolic, we can say even more, which will allow us to apply our results of Sect. 4.
Proposition 5.13
Let \((X,d,\ll ,\le ,\tau )\) be a causally path-connected, approximating Lorentzian pre-length space. If X is globally hyperbolic, then X is causally simple, meaning that \(J^\pm (p)\) is closed and thus \(J^\pm (p) = \overline{I^\pm (p)}\) for all \(p \in X\). Moreover, if X is causally simple, then X is causally continuous.
Proof
These statements were shown by Aké et al. for Lorentzian length spaces [1, Propositions 3.13 and 3.14]. The same proof goes through for our assumptions, because the assumption of localizability is only needed to invoke [1, Sequence Lemma 2.25] which in our case is replaced by Lemma 2.18. \(\square \)
We also need the following result.
Lemma 5.14
Let \((X,d,\ll ,\le ,\tau )\) be an approximating Lorentzian pre-length space with limit curves. Suppose, in addition, that (X, d) is a proper metric space equipped with a Borel probability measure of full support and corresponding averaged volume functions \(t^+ :X \rightarrow [-\infty ,0]\) and \(t^- :X \rightarrow [0,\infty ]\) (see Definition 4.2). If X is globally hyperbolic, then \(t^\pm \) are time functions. Moreover, for every doubly inextendible future-directed causal curve \(\gamma :(a,b) \rightarrow X\) it holds that
Proof
We follow [21, Satz II.20]. Suppose X is a globally hyperbolic, approximating Lorentzian pre-length space with limit curves. Then by Proposition 5.13X is causally continuous, and thus, by Theorem 4.13\(t^\pm \) are time functions.
To show the second part of the statement, assume for contradiction that \(\gamma :(a,b] \rightarrow X\) is a future-directed past-inextendible causal curve with
On the other hand, by standard measure theory [40, Thm. 1.2.5] and Lebesgue’s dominated convergence theorem,
Assumption (3) implies that there exists an \(r \in (0,1)\) and a point
This means that for every \(s>a\), there exists a \(q \in I^-(\gamma (s))\) such that \(d(q,p) < r\). In particular, we can find a sequence \(q_n \in I^-\left( \gamma (a + 1/n)\right) \) such that \(d(q_n,p) < r\) for all \(n \in \mathbb {N}\). Because d is proper, the closed ball of radius r around p is compact, and hence, \(q_n\) converges to a limit point q (up to a subsequence). Now for a given \(s > a\), we choose \(n_0\) such that \(s > a + 1/n_0\). Then, by the push-up Lemma 2.3, \(q_n \in I^-(\gamma (s))\) for all \(n \ge n_0\). Because of this, \(q \in \overline{I^-(\gamma (s))} = J^-(\gamma (s))\), where the last equality follows by global hyperbolicity and Proposition 5.13. Since \(s>a\) was arbitrary, we have that \(\gamma \subseteq J^+(q)\). In particular, \(q \le \gamma (b)\), and by global hyperbolicity, \(J(q,\gamma (b))\) is compact. But then the curve \(\gamma \) is imprisoned in \(J(q,\gamma (b))\), in contradiction to global hyperbolicity. \(\square \)
This concludes our characterization of global hyperbolicity with the existence of Cauchy time functions (and Cauchy sets) in the setting of Lorentzian pre-length spaces.
Data Availability
No data were collected or analyzed as part of this project.
Notes
Doubly inextendible causal curves are often simply called “inextendible”. On the other hand, Kunzinger and Sämann [42] call a curve inextendible if it is either future- or past-inextendible (or both), and have no need for the concept of double-inextendibility. We will be more precise when needed.
In [1, 42] a Lorentzian pre-length space with this property is called stably causal because in the smooth case K-causality and stable causality are equivalent [49]. The definition of stable causality [35, p. 433], however, requires knowledge about causal properties of “nearby” Lorentzian metrics. Since (causal) stability of Lorentzian pre-length spaces has not yet been investigated in this sense, we prefer to use the standard term K-causal.
References
Aké Hau, L., Cabrera Pacheco, A.J., Solis, D.A.: On the causal hierarchy of Lorentzian length spaces. Class. Quantum Gravity 37(21), 215013 (2020)
Alexander, S.B., Graf, M., Kunzinger, M., Sämann, C.: Generalized cones as Lorentzian length spaces: causality, curvature, and singularity theorems. To appear in Commun. Anal. Geom. arXiv:1909.09575
Allen, B., Burtscher, A.: Properties of the null distance and spacetime convergence. Int. Math. Res. Not. IMRN 10, 7729–7808 (2022)
Andersson, L., Galloway, G.J., Howard, R.: The cosmological time function. Class. Quantum Gravity 15(2), 309–322 (1998)
Bär, C., Ginoux, N., Pfäffle, F.: Wave Equations on Lorentzian Manifolds and Quantization. European Mathematical Society Publishing House, Zürich (2007)
Bartnik, R.: Remarks on cosmological spacetimes and constant mean curvature surfaces. Commun. Math. Phys. 117(4), 615–624 (1988)
Bernal, A.N., Sánchez, M.: On smooth Cauchy hypersurfaces and Geroch’s splitting theorem. Commun. Math. Phys. 243(3), 461–470 (2003)
Bernal, A.N., Sánchez, M.: Smoothness of time functions and the metric splitting of globally hyperbolic spacetimes. Commun. Math. Phys. 257(1), 43–50 (2005)
Bernal, A.N., Sánchez, M.: Further results on the smoothability of Cauchy hypersurfaces and Cauchy time functions. Lett. Math. Phys. 77(2), 183–197 (2006)
Bernard, P., Suhr, S.: Lyapounov functions of closed cone fields: from Conley theory to time functions. Commun. Math. Phys. 359(2), 467–498 (2018)
Bernard, P., Suhr, S.: Cauchy and uniform temporal functions of globally hyperbolic cone fields. Proc. Am. Math. Soc. 148(11), 4951–4966 (2020)
Bombelli, L., Lee, J., Meyer, D., Sorkin, R.: Space–time as a causal set. Phys. Rev. Lett. 59, 521–524 (1987)
Borchers, H.-J., Sen, R.N.: Theory of ordered spaces. Commun. Math. Phys. 132(3), 593–611 (1990)
Borchers, H.-J., Sen, R.N.: Mathematical implications of Einstein–Weyl causality. In: Lecture Notes in Physics, vol. 709. Springer, Berlin (2006)
Borde, A., Dowker, H.F., Garcia, R.S., Sorkin, R.D., Surya, S.: Causal continuity in degenerate spacetimes. Class. Quantum Gravity 16(11), 3457–3481 (1999)
Burago, D., Burago, Y., Ivanov, S.: A course in metric geometry. In: Graduate Studies in Mathematics, vol. 33. American Mathematical Society, Providence, RI (2001)
Busemann, H.: Timelike spaces. Dissertationes Math. (Rozprawy Mat.) 53, 52 (1967)
Cavalletti, F., Mondino, A.: Optimal transport in Lorentzian synthetic spaces, synthetic timelike Ricci curvature lower bounds and applications. To appear in Camb. J. Math. arXiv:2004.08934
Chruściel, P.T., Grant, J.D.E.: On Lorentzian causality with continuous metrics. Class. Quantum Gravity 29(14), 145001 (2012)
Chruściel, P.T., Grant, J.D.E., Minguzzi, E.: On differentiability of volume time functions. Ann. Henri Poincaré 17(10), 2801–2824 (2016)
Dieckmann, J.: Volumenfunktionen in der allgemeinen Relativitätstheorie. Ph.D. Thesis, Berlin (1987)
Dieckmann, J.: Cauchy surfaces in a globally hyperbolic space–time. J. Math. Phys. 29(3), 578–579 (1988)
Dieckmann, J.: Volume functions in general relativity. Gen. Relativ. Gravit. 20(9), 859–867 (1988)
Ehlers, J., Pirani, F.A.E., Schild, A.: The geometry of free fall and light propagation. In: General Relativity (Papers in Honour of J. L. Synge), pp. 63–84. Clarendon Press, Oxford (1972)
Eschenburg, J.-H.: The splitting theorem for space–times with strong energy condition. J. Differ. Geom. 27(3), 477–491 (1988)
Fathi, A.: Time functions revisited. Int. J. Geom. Methods Mod. Phys. 12(8), 1560027 (2015)
Fathi, A., Siconolfi, A.: On smooth time functions. Math. Proc. Camb. Philos. Soc. 152(2), 303–339 (2012)
Finster, F.: Causal fermion systems: a primer for Lorentzian geometers. In: Journal of Physics Conference Series, volume 968 of Journal of Physics Conference Series, p. 012004 (2018)
Galloway, G.J.: The Lorentzian splitting theorem without the completeness assumption. J. Differ. Geom. 29(2), 373–387 (1989)
García-Heveling, L.: Causality theory of spacetimes with continuous Lorentzian metrics revisited. Class. Quantum Gravity 38(14), 145028 (2021)
Geroch, R.: Domain of dependence. J. Math. Phys. 11, 437–449 (1970)
Geroch, R.P.: Topology in general relativity. J. Math. Phys. 8, 782–786 (1967)
Grant, J.D.E., Kunzinger, M., Sämann, C.: Inextendibility of spacetimes and Lorentzian length spaces. Ann. Glob. Anal. Geom. 55(1), 133–147 (2019)
Grant, J.D.E., Kunzinger, M., Sämann, C., Steinbauer, R.: The future is not always open. Lett. Math. Phys. 110(1), 83–103 (2020)
Hawking, S.: The existence of cosmic time functions. Proc. R. Soc. Lond. A A308, 433–435 (1968)
Hawking, S.W., Ellis, G.F.R.: The large scale structure of space-time. In: Cambridge Monographs on Mathematical Physics. Cambridge University Press (1973)
Hawking, S.W., Sachs, R.K.: Causally continuous spacetimes. Commun. Math. Phys. 35, 287–296 (1974)
Horowitz, G.T.: Topology change in classical and quantum gravity. Class. Quantum Gravity 8, 587–602 (1991)
Jost, J.: Postmodern analysis. In: Universitext, 3rd edn. Springer, Berlin (2005)
Krantz, S.G., Parks, H.R.: Geometric integration theory. In: Cornerstones. Birkhäuser, Boston (2008)
Kronheimer, E.H., Penrose, R.: On the structure of causal spaces. Proc. Camb. Philos. Soc. 63, 481–501 (1967)
Kunzinger, M., Sämann, C.: Lorentzian length spaces. Ann. Glob. Anal. Geom. 54(3), 399–447 (2018)
Kunzinger, M., Steinbauer, R.: Null distance and convergence of Lorentzian length spaces. Ann. Henri Poincaré 23, 4319–4342 (2022)
Levin, V.L.: Continuous utility theorem for closed preorders on a metrizable \(\sigma \)-compact space. Sov. Math. Dokl. 28(3), 715–718 (1983)
Ling, E.: Aspects of \(C^0\) causal theory. Gen. Relat. Gravit. 52(6), 57 (2020)
Loll, R.: Quantum gravity from causal dynamical triangulations: a review. Class. Quantum Gravity 37(1), 013002 (2020)
Marczewski, E., Sikorski, R.: Measures in non-separable metric spaces. Colloq. Math. 1, 133–139 (1948)
McCann, R.J.: Displacement convexity of Boltzmann’s entropy characterizes the strong energy condition from general relativity. Camb. J. Math. 8(3), 609–681 (2020)
Minguzzi, E.: \(K\)-causality coincides with stable causality. Commun. Math. Phys. 290(1), 239–248 (2009)
Minguzzi, E.: Time functions as utilities. Commun. Math. Phys. 298(3), 855–868 (2010)
Minguzzi, E.: Topological ordered spaces as a foundation for a quantum spacetime theory. J. Phys: Conf. Ser. 442, 012034 (2013)
Minguzzi, E.: The representation of spacetime through steep time functions. J. Phys: Conf. Ser. 968, 012009 (2018)
Minguzzi, E.: Lorentzian causality theory. Living Rev. Rel. 22(1), 3–204 (2019)
Mondino, A., Suhr, S.: An optimal transport formulation of the Einstein equations of general relativity. J. Eur. Math. Soc. (2022). 25(3), 933–994 (2022)
Nachbin, L.: Topology and order. In: Van Nostrand Mathematical Studies, No. 4. D. Van Nostrand Co., (1965). Translated from the Portuguese by Lulu Bechtolsheim
Nicolai, H., Peeters, K.: Loop and Spin Foam Quantum Gravity: A Brief Guide for Beginners, pp. 151–184. Springer, Berlin (2007)
Nomizu, K., Ozeki, H.: The existence of complete Riemannian metrics. Proc. Am. Math. Soc. 12, 889–891 (1961)
Ringström, H.: The Cauchy problem in general relativity. In: ESI Lectures in Mathematics and Physics. European Mathematical Society (EMS), Zürich (2009)
Sachs, R.K., Wu, H.H.: General relativity for mathematicians. In: Graduate Texts in Mathematics, vol. 48. Springer, New York (1977)
Sämann, C.: Global hyperbolicity for spacetimes with continuous metrics. Ann. Henri Poincaré 17(6), 1429–1455 (2016)
Seifert, H.-J.: Smoothing and extending cosmic time functions. Gen. Relat. Gravit. 8(10), 815–831 (1977)
Sorkin, R.D.: Forks in the road, on the way to quantum gravity. Int. J. Theor. Phys. 36, 2759–2781 (1997)
Sorkin, R.D., Woolgar, E.: A causal order for spacetimes with \(C^0\) Lorentzian metrics: proof of compactness of the space of causal curves. Class. Quantum Gravity 13(7), 1971–1993 (1996)
Sormani, C., Vega, C.: Null distance on a spacetime. Class. Quantum Gravity 33(8), 085001 (2016)
Surya, S.: The causal set approach to quantum gravity. Living Rev. Rel. 22(1), 5 (2019)
Weyl, H.: Raum. Zeit. Materie, vol. 251 (7th edn). Springer, Berlin (1988)
Woodhouse, N.M.J.: The differentiable and causal structures of space–time. J. Math. Phys. 14, 495–501 (1973)
Acknowledgements
LGH would like to thank Didier Solis for communication related to their work [1]. The authors are also grateful to Ettore Minguzzi for feedback on the introduction, and to the anonymous referees for constructive comments. AB’s research is supported by the Dutch Research Council (NWO), Project number VI.Veni.192.208.
Author information
Authors and Affiliations
Corresponding author
Ethics declarations
Conflict of interest
The authors state that there is no conflict of interest.
Additional information
Communicated by Mihalis Dafermos.
Publisher's Note
Springer Nature remains neutral with regard to jurisdictional claims in published maps and institutional affiliations.
Rights and permissions
Open Access This article is licensed under a Creative Commons Attribution 4.0 International License, which permits use, sharing, adaptation, distribution and reproduction in any medium or format, as long as you give appropriate credit to the original author(s) and the source, provide a link to the Creative Commons licence, and indicate if changes were made. The images or other third party material in this article are included in the article’s Creative Commons licence, unless indicated otherwise in a credit line to the material. If material is not included in the article’s Creative Commons licence and your intended use is not permitted by statutory regulation or exceeds the permitted use, you will need to obtain permission directly from the copyright holder. To view a copy of this licence, visit http://creativecommons.org/licenses/by/4.0/.
About this article

Cite this article
Burtscher, A., García-Heveling, L. Time Functions on Lorentzian Length Spaces. Ann. Henri Poincaré (2024). https://doi.org/10.1007/s00023-024-01461-y
Received:
Accepted:
Published:
DOI: https://doi.org/10.1007/s00023-024-01461-y