
Abstract
We show that, apart from degeneracies, determining a plane curve whose curvature depends on its position essentially consists of determining a null curve in the Lorentzian 3-space when the null tangent direction depends on its position. We use this point of view to investigate the intrinsic equations for the n-elastic curves. We show how the problem of prescribed null tangent direction in terms of the position can be solved by quadratures when the prescription exhibits sufficient symmetries. This problem is formalized in terms of a convenient contact 3-form.
Similar content being viewed by others


Avoid common mistakes on your manuscript.
1 Introduction
The problem of determining a plane curve when its curvature is defined in terms of its position is not only important in geometry, but also has implications in physics. For instance, the Newton-Lorentz law for the planar motion of a charged particle under a perpendicular magnetic field can be interpreted as a position-dependent curvature problem for Euclidean plane curves. The understanding of such motions plays a crucial role in the understanding of some dynamic processes in plasmas [1].
The solutions of some well-known classical variational problems are plane curves whose curvature only depends on the Euclidean distance d from a given line. The Euler elasticae curves (see [2, 3] and references therein), which minimize the bending energy of a thin, inextensible wire, have curvature proportional to d. Other classical example is provided by the profile curves of Delaunay’s surfaces [4]. More recently, in [5], the authors obtained a full description of n-elastic curves, i.e., curves whose curvature is of the form \(d^n+\mu \), with \(n,\mu \in \mathbb {R}\). This work was motivated by the study of stationary soap films with vertical potentials. For more examples on curves whose curvature depends on the Euclidean distance from a given line, see [6]. D. Singer [7] addressed the case where the prescribed curvature only depends on the Euclidean distance r to a point. He reformulated the equations of the problem as a Hamiltonian system associated to the motion of a body under the influence of a central force. This Hamiltonian system exhibits a sufficient of symmetries to be integrable by quadratures. A. Berger [8] considered the same problem from a dynamical point of view, and gave a complete classification of the closed curves whose curvature prescription is of the form \(ar^b\), with \(a,b\in \mathbb {R}\). In [9], the authors considered curves in the Lorentzian plane with Lorentzian curvature depending on their position. They showed how to determine such curves through quadratures when the prescribed curvature function only depends on the Lorentzian distance to a point.
The second main role in the present paper will be played by null curves in the Lorentzian 3-space \(\mathbb {R}^{2,1}\). It is well known that the one-parameter family of osculating circles associated to a curve \(\gamma \) in the Euclidean plane, assuming that \(\gamma \) has nonvanishing curvature and it has no vertices, defines a null curve \(\Gamma \) in the Lorentzian 3-space \(\mathbb {R}^{2,1}\) [10, 11]. Geometrically, the null curve \(\Gamma \) represents the one-parameter family of osculating circles to the curve \(\gamma \) under the isotropy projection. This point of view provides [10, 11] an elegant proof of Tait-Kneser theorem, which states that the osculating circles along a plane curve with monotone non-vanishing curvature are pairwise disjoint and nested. The correspondence between plane curves and null curves in the Lorentzian 3-space, which we recall in Sect. 2, holds almost verbatim in other plane geometries (eg. Lorentzian, isotropic and equi-centro-affine planes [10, 12, 13]).
In Sect. 3, we show that, apart from degeneracies, determining a plane curve when the curvature depends on its position (see Problem 3.1) essentially consists of determining a null curve in the Lorenztian 3-space when the null tangent direction depends on its position (see Problem 3.2). This reduces, in a geometric sensible way, the differential equations of the initial problem to a nonautonomous system of two differential equations. Since curves in other plane geometries (equipped with the corresponding notions of curvature and osculating conics) also produce null curves in the Lorentzian 3-space, Problem 3.2 encompasses the analogues of the initial problem in other plane geometries, thus being a little more general. We show how the intrinsic equations for the solutions of Problem 3.1 can be deduced from the corresponding solutions of Problem 3.2. In particular, in Example 3.8, we investigate the intrinsic equations for the n-elastic curves. Recall that the curvature function k of a classical elastic curve is a solution of the equation \(k''=-\frac{1}{2} k^3+\lambda k\), with \(\lambda \in \mathbb {R}\). We obtain the analogous second order differential equations for n-elastic curves (see (13)). When the prescription of null directions in Problem 3.2 exhibits a sufficient number of symmetries, one can expect to solve the corresponding system of differential equations by quadratures. In Sect. 4 we will show how this system can be reduced to a first order ordinary differential equation together with a quadrature when the prescription of null directions is invarian for different one-parameter subgroups of \({{\,\textrm{O}\,}}(2,1)\). Apart degeneracies, Problem 3.2 admits a coordinate-free description in terms of a convenient contact 3-form, as explained in Sect. 5.
2 Plane curves and null curves
Consider the Lorentzian 3-space \(\mathbb {R}^{2,1}:=(\mathbb {R}^3,\cdot )\), with the scalar product of signature (2, 1) given by \((x_1,y_1,z_1)\cdot (x_2,y_2,z_2)=x_1x_2+y_1y_2-z_1z_2\). A nonzero vector \(\vec {u}\in \mathbb {R}^{2,1}\) is called lightlike (respectively, timelike and spacelike) if \( \vec {u}\cdot \vec {u}=0\) (respectively, \(\vec {u}\cdot \vec {u}<0\) and \(\vec {u}\cdot \vec {u} >0\)). Any line spanned by a lightlike vector is called a null line. A null curve in the Lorentzian 3-space is a regular curve whose tangent vector at each point is lightlike.
The Lorentzian 3-space models the space of all points and oriented circles in the Euclidean plane \(\mathbb {R}^2\) as follows [14]. Points in \(\mathbb {R}^{2}\) will be regarded as circles of zero radius. Denote by \((\vec {e}_1,\vec {e}_2,\vec {e}_3)\) the canonical basis of \(\mathbb {R}^{2,1}\). Consider the natural identification \(\mathbb {R}^2\cong \textrm{span}\{\vec {e}_3\}^\perp \). Given a point \(P=(x,y,z)\in \mathbb {R}^{2,1}\), denote by \(\mathcal {L}(P)\) the light cone with vertex at P. The intersection of \(\mathcal {L}(P)\) with \(\mathbb {R}^2\) is a circle centered at (x, y) with radius |z|. Equip this circle with the positive orientation if \(z>0\) and with the negative orientation if \(z<0\). This establishes a one-to-one correspondence, called the isotropy projection, between \(\mathbb {R}^{2,1}\) and the set of points and oriented circles in \(\mathbb {R}^2\).
Under the isotropy projection, a one-parameter family of points and oriented circles in the Euclidean plane corresponds therefore to a curve in the Lorentzian 3-space \(\mathbb {R}^{2,1}\). In particular, the family of osculating circles to a given regular plane curve \(\gamma \) corresponds to a certain curve in \(\mathbb {R}^{2,1}\), which we call, following [11], the L-evolute of \(\gamma \). More precisely: let \(\gamma :I\rightarrow \mathbb {R}^2\) be a regular curve with nonvanishing curvature k; let \(\varepsilon :I\rightarrow \mathbb {R}^2\) be its evolute and \(z=1/k\) its (signed) radius of curvature, so that \(\varepsilon =\gamma +\frac{1}{k}\textbf{n}\), where \(\textbf{n}\) is the unit normal vector field of \(\gamma \); the L-evolute of \(\gamma \) is the curve \(\Gamma =\varepsilon +z\vec {e}_3:I\rightarrow \mathbb {R}^{2,1}\). For each \(t\in I\), \(\Gamma (t)\in \mathbb {R}^{2,1}\) corresponds to the osculating circle of \(\gamma \) at t under the isotropy projection.
We have the following:
Proposition 2.1
[10, 11] Let \(\gamma :I\rightarrow \mathbb {R}^2\cong \textrm{span}\{\vec {e}_3\}^\perp \) be a regular curve with nonvanishing curvature k. If the derivative \(k'\) is nonvanishing (i.e., \(\gamma \) has no vertex points), then the L-evolute \(\Gamma \) is a null curve for which \(\Gamma '\wedge \Gamma ''\) is nonvanishing.
Conversely, given a null curve \(\Gamma :I\rightarrow \mathbb {R}^{2,1}\), with \(\Gamma '\wedge \Gamma ''\) nonvanishing, which does not intersect \(\mathbb {R}^2\), there exists a unique regular curve \(\gamma :I\rightarrow \mathbb {R}^2\) with nonvanishing curvature and without vertex points such that either (a) the L-evolute of \(\gamma \) is \(\Gamma \) or (b) the L-evolute of the opposite curve \(\gamma ^{\textrm{op}}\) is \(\Gamma ^{\textrm{op}}\).
In the conditions of Proposition 2.1, the curve \(\gamma \) is obtained from \(\Gamma \) as follows. Let L be the null line spanned by \(\Gamma '\). Then \(\gamma \) is the intersection of the affine line \(\Gamma +L\) with \(\mathbb {R}^2\), that is, if \(\Gamma =\varepsilon +z\vec {e}_3\), where \(\varepsilon \) is a curve in \(\mathbb {R}^2\), then
Observe that \(z'\) is nonvanishing since \(\Gamma \) is a (regular) null curve.
Remark 2.2
The correspondence between plane curves and null curves in the Lorentzian 3-space holds almost verbatim in other plane geometries (eg. Lorentzian, isotropic and equi-centro-affine planes [10, 12, 13]).
3 Curvature depending on the position from null curves point of view
Consider the problem of finding a curve \(\gamma \) in the Euclidean plane when its curvature is given in terms of its position. More precisely:
Problem 3.1
Let U be an open subset of \(\mathbb {R}^2\). Given a smooth function \(\kappa :U\rightarrow \mathbb {R}\), find a regular curve \(\gamma :I\rightarrow U\) such that the curvature function of \(\gamma \) is given by \(k=\kappa \circ \gamma \).
This problem amounts to solve the nonlinear second order differential equation
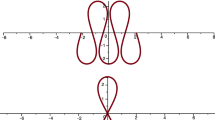
We shift the focus from the curvature to the osculating circles. Suppose that \(\gamma \) is any solution of Problem 3.1 with nonvanishing curvature function and without vertex points. By Proposition 2.1, \(\gamma \) admits a well-defined L-evolute \(\Gamma \) such that \(\Gamma '\wedge \Gamma ''\) is nonvanishing. Set \(\rho =1/\kappa \) and assign to each \(P\in U\) the family \(\mathcal {S}(P)\) of oriented circles of signed radius \(\rho (P)\) through that point. Under the isotropy projection, this family corresponds to the intersection between the light cone with vertex at P and the horizontal plane \(z=\rho (P)\). If the curve \(\gamma \) passes through P, then \(\gamma \) is osculated at that point by one of the oriented circles in \(\mathcal {S}(P)\). Consequently, \(\Gamma \in \mathcal {S}(\gamma )\). The situation is illustrated in Fig. 1.

A curve \(\gamma \) and its L-evolute \(\Gamma \)
Denote by \(\mathbb {P}(\mathcal {L})\) the projectivization of the light cone
Let M be the set of points \((x,y,z,L)\in \mathbb {R}^{2,1}\times \mathbb {P}(\mathcal {L})\) satisfying \(z=\rho \big (P\big )\), where \(P\in U\) is the point of intersection between the affine line \((x,y,z)+L\) and \(\mathbb {R}^2\). Then the solution \(\gamma \) of Problem 3.1, when its curvature function k is nonvanishing and \(\gamma \) has no vertex points, determines a curve
satisfying the contact condition
Parametrize the projectivized light cone \( \mathbb {P}(\mathcal {L})\) by:
Hence
For any smooth function \(\rho \), the set M can be seen as the preimage of a regular value, so M is a 3-dimensional submanifold of \(\mathbb {R}^{2,1}\times \mathbb {P}(\mathcal {L})\).
This motivates the following more general problem:
Problem 3.2
Given a 3-dimensional manifold M of \(\mathbb {R}^{2,1}\times \mathbb {P}(\mathcal {L})\), find the curves \({\hat{\Gamma }}=(\Gamma ,L)\) in M satisfying the contact condition \(L={{\,\textrm{span}\,}}\{\Gamma '\}\).
Remark 3.3
Let M be a 3-dimensional submanifold of \(\mathbb {R}^{2,1}\times \mathbb {P}(\mathcal {L})\). A curve \(\hat{\Gamma }=(x,y,z,L_\theta )\) in M satisfies the contact condition (3) if, and only if, \(x'=z'\cos \theta \) and \(y'=z'\sin \theta \). Assuming that \(z'\) is nonvanishing, we can use z to reparametrize \({\hat{\Gamma }}\) so that the contact condition can be written as:
Remark 3.4
In Sect. 5, we will give a coordinate-free description of this contact condition in terms of an appropriate local contact 3-form.
Notice now that if a curve \({\hat{\Gamma }}=(\Gamma ,L)\) in M is a solution of Problem 3.2, with M defined by \(z=\rho \big (x-z\cos \theta ,y-z\sin \theta \big )\), then the contact condition implies that \(\Gamma \) is a null curve. Assume that \(\Gamma '\wedge \Gamma ''\) is nonvanishing. Hence there exists a unique regular curve \(\gamma :I\rightarrow \mathbb {R}^2\) with novanishing curvature and without vertex points such that either (a) the L-evolute of \(\gamma \) is \(\Gamma \) or (b) the L-evolute of the opposite curve \(\gamma ^{\textrm{op}}\) is \(\Gamma ^{\textrm{op}}\). This curve \(\gamma \) can be recovered from \(\Gamma \) by applying formula (1). Clearly, either \(\gamma \) or \(\gamma ^{\textrm{op}}\) is a solution of Problem 3.1 with respect to the function \(\kappa =1/\rho \).
Thus, apart from certain degeneracies, we have shown that solving Problem 3.1essentially consists of solving Problem 3.2for manifolds M of the form (5).
Remark 3.5
The reformulation of the initial problem in terms of null curves has some advantages:
-
(1)
Since the evolutes of curves in other plane geometries (e.g. Lorentzian, isotropic and equi-centro-affine planes), equipped with the corresponding notions of curvature, also produce null curves in the Lorentzian 3-space, our approach in terms of null curves encompasses the analogues of the initial problem in other plane geometries, only changing the form of the 3-dimensional manifold \(M\subset \mathbb {R}^{2,1}\times \mathbb {P}(\mathcal {L})\).
-
(2)
We have reduced, in a sensible geometrical way, the differential equations of the problem to the nonautonomous system (6).
Remark 3.6
Let M be a 3-dimensional submanifold of \(\mathbb {R}^{2,1}\times \mathbb {P}(\mathcal {L})\) and assume that M is of the form \(\theta =\theta (x,y,z)\), with (x, y, z) in some open set U of \(\mathbb {R}^{2,1}\), as in Remark 3.3. Then, by applying the existence and uniqueness theorem of solutions to the system of first order ordinary differential equations (6), given \(P=(x_0,y_0,z_0)\) in U, there exists \(\delta >0\) and a unique curve \({\hat{\Gamma }}=(\Gamma ,L):(-\delta , \delta )\rightarrow M\) such that \({\hat{\Gamma }}(0)=(P,L_{\theta _0})\), where \(\theta _0=\theta (x_0,y_0,z_0)\), and \(L={{\,\textrm{span}\,}}\{\Gamma '\}\), up to reparametrization.
Proposition 3.7
Let \(\kappa \) be a smooth function on an open subset U of \(\mathbb {R}^2\). Fix \(p\in U\) such that \(\kappa (p)\ne 0\) and \(\textrm{grad}\,\kappa (p)\ne 0\). Given a unit vector \(\textbf{n}_0\) not perpendicular to the level curve of \(\kappa \) at p, there exists \(\delta >0\) and a unique (up to orientation-preserving reparametrization) solution \(\gamma :(-\delta ,\delta )\rightarrow U\) of Problem 3.1 such that \(\gamma (0)=p\), and the circle centered at \(p+\frac{1}{ \kappa (p)} \textbf{n}_0\) with signed radius \(\frac{1}{\kappa (p)}\) osculates \(\gamma \) at p.
Proof
Take \(P=p+\frac{1}{ \kappa (p)}\textbf{n}_0+\frac{1}{\kappa (p)}\vec {e}_3,\) and \(\textbf{n}_0=(\cos \theta _0, \sin \theta _0)\). Since, by hypothesis, \(\textbf{n}_0\) is not perpendicular to the level curve of \(\kappa \) at p, the manifold M given by (5) is locally a graph \(\theta =\theta (x,y,z)\) at \((P,L_{\theta _0})\). The existence and uniqueness of local solution follow directly from Remark 3.6. \(\square \)
3.1 Intrinsic equations
Given a smooth function \(\kappa \) on an open subset \(U\subset \mathbb {R}^2\), suppose we know a solution \(x(z),y(z),\theta (z)\) of the corresponding system (6), giving rise to the solution
of Problem 3.1. Denote by t an arclength parameter of \(\gamma \). Then
Since \(z(t)=\frac{1}{k(t)} \), where \(k=\kappa \circ \gamma \) is the curvature of \(\gamma \), the intrinsic equation for \(\gamma \) is obtained by integrating the first order differential equation (7).
Observe that, differentianting (7) with respect to t and replacing \(z=\frac{1}{k} \), we obtain the following second order differential equation for k:
Example 3.8
Let \(\kappa \) be defined by
where \(n,\mu \in \mathbb {R}\). A curve \(\gamma \) whose curvature is given by \(k=\kappa \circ \gamma \) is called an n-elastic curve [5]. Recall that the curvature function k of a classical elastic curve (the case \(n=1,\mu =0\)) is a solution of the equation \(k''=-\frac{1}{2} k^3+\lambda k\), with \(\lambda \in \mathbb {R}\). We will use (8) to obtain the corresponding equation for an n-elastic curve. We will only consider the case \(\mu =0\) and \(Y>0\). The submanifold M of \(\mathbb {R}^{2,1}\times \mathbb {P}(\mathcal {L})\) is then given by \(z=(y-z\sin \theta )^{-n},\) hence (for \(n\ne 0\))
where \(p=\frac{1}{n}+1\). Let \(\Gamma =(x,y,z,L_\theta )\) be a solution of (6) in M. From \(\frac{dy}{dz}=\sin \theta \), we obtain the first order linear ODE
which can be easily integrated to obtain (for \(p\ne 0\))
and, from (9),
Differentiating this with respect to z gives
and we can differentiate again to obtain
Replacing (10), (11) and (12) in (8), with \(z=\frac{1}{k}\) and \(p=\frac{1}{n}+1\), we can see, after straightforward computations, that the curvature function k of a plane curve \(\gamma =(X,Y)\) whose curvature at each point is prescribed in terms of the function \(\kappa (X,Y)=Y^{n}\), with \(n\ne -1,0\), satisfies a second order ODE of the form
where
For \(n=1\), we have \(A(1,\lambda )=0\), \(B(1)=-\frac{1}{2}\), \(C(1,\lambda )=\lambda \), recovering the well-known equation for the classical elastic curves.
4 Solutions by quadrature
The similarity group of \(\mathbb {R}^{2,1}\), \(\textrm{Sim}(2,1):=(\mathbb {R}^+\times \textrm{O}(2,1))\ltimes \mathbb {R}^{2,1},\) acts on \(\mathbb {R}^{2,1}\times \mathbb {P}(\mathcal {L})\) as follows: given \(g=((\lambda ,A),\textbf{t})\in \textrm{Sim}(2,1)\) and \((p,L)\in \mathbb {R}^{2,1}\times \mathbb {P}(\mathcal {L})\), then
Let H be a one-parameter subgroup of \(\textrm{Sim}(2,1)\). If a 3-dimensional submanifold M of \(\mathbb {R}^{2,1}\times \mathbb {P}(\mathcal {L})\) is invariant under H, then H is a Lie point symmetry of system (6), which implies that, for a convenient change of variables, it can be reduced to a first order ordinary differential equation together with a quadrature [15, Theorem 2.66]. Next we will exemplify how this can be explicitly done for different one-parameter subgroups H of \(\textrm{Sim}(2,1)\).
4.1 Invariance under boosts of timelike axis
Let \(H=\{R^{\alpha }:\alpha \in S^1\}\) be the one-parameter subgroup of boosts with axis \(E_3=\textrm{span}\{\vec {e}_3\}\). The action of H on \(\mathbb {R}^{2,1}\times \mathbb {P}(\mathcal {L})\) is given by \(R^\alpha (x,y,z,\theta )=(x\cos \alpha -y\sin \alpha ,x\sin \alpha +y\cos \alpha ,z,\theta +\alpha ),\) with infinitesimal generator \(\textbf{v}:=x\frac{\partial }{\partial y}-y\frac{\partial }{\partial x}+\frac{\partial }{\partial \theta },\) which admits the following set of invariants
on the open set \(t,u>0\). We will assume that \(z\ne 0\) as well. Considering a polar angle function \(\beta \) of (x, y), we have \(\textbf{v}(\beta )=1\).
At the points \((x,y,z,L_\theta )\in \mathbb {R}^{2,1}\times \mathbb {P}(\mathcal {L})\) around which (15) is a complete set of functional invariants, i.e., the Jacobian matrix \(\frac{\partial (z,t,u)}{\partial (x,y,z,\theta )}\) has rank 3 at those points, M is locally given by \(F(z,t,u)=0\), for some smooth function F (see [15, Proposition 2.18], for example). Assume further that \(F_z\) is nonvanishing, so that M is given locally by \(z=\rho (t,u)\), for some nonvanishing smooth function \(\rho \). Following the general procedure described in [15, Theorem 2.66], we consider the change of variables from (x, y, z) to \((t,u,\beta )\), with t as the new independent variable, so that system (6) takes the form
with \(\cos (\theta -\beta )=\frac{u^2+\rho ^2-t^2}{2u\rho }.\) Hence
So we have locally reduced system (6) to a first order ordinary differential equation (16a) for u together with a quadrature (16b), which gives \(\beta \) from u. The corresponding solutions are then given by \({\hat{\Gamma }}=(\Gamma ,{{\,\textrm{span}\,}}\{\Gamma '\})\), with
Example 4.1
The Norwich spiral is the curve, besides the circle, whose radius of curvature is, at all points, equal to the distance to a fixed point. It is well known that the Norwich spiral is a second involute of a circle. We test the formulas obtained above for this particular case. Consider the function \(\kappa :\mathbb {R}^2\setminus \{0\}\rightarrow \mathbb {R}\) defined by \(\kappa (X,Y)=\frac{1}{\sqrt{X^2+Y^2}}\). In this case, M is given by \(z=\rho (t)=t\) and the integration of (16a) yields \(u^2=at\), with \(a>0\). From (16b) we obtain
with \(b\in \mathbb {R}\). By using the change of variable \(\tan v=\sqrt{\frac{4t-a}{a}}\), we have
with \(a>0,b\in \mathbb {R}\) and \(-\frac{\pi }{2}<v<\frac{\pi }{2}\). For each a, b, \(\varepsilon =(u\cos \beta ,u\sin \beta )\) is an involute of the circle with center at the origin and radius a/2 (see [16]), hence the Norwich spiral is a second involute of a circle.
4.2 Invariance under boosts of spacelike axis
Let \(H=\{R^{\alpha }:\alpha \in S^1\}\) be the one-parameter subgroup of boosts with axis \(E_1=\textrm{span}\{\vec {e}_1\}\). Parameterize \(\mathbb {P}(\mathcal {L}\cap \{\epsilon xz>0\})\), with \(\epsilon =\pm 1\), by
The action of H on \(\mathbb {R}^{2,1}\times \mathbb {P}(\mathcal {L}\cap \{\epsilon xz>0\})\) is given by \(R^\alpha (x,y,z,\nu )=(x,y\cosh \alpha +z\sinh \alpha ,y\sinh \alpha +z\cosh \alpha ,\nu +\alpha ),\) with infinitesimal generator \(\textbf{v}:=z\frac{\partial }{\partial y}+y\frac{\partial }{\partial z}+\frac{\partial }{\partial \nu },\) and it admits the following set of invariants
on the open set \(z-x\cosh \nu >|y-x\sinh \nu |\), \(z>|y|\), \(x>0\). For \(\beta :={{\,\textrm{arctanh}\,}}\big (\frac{y}{z}\big )\), we have \(\textbf{v}(\beta )=1.\)
At the points \((x,y,z,L_\nu )\in \mathbb {R}^{2,1}\times \mathbb {P}(\mathcal {L}\cap \{\epsilon xz>0\})\) around which (18) is a complete set of functional invariants, M is locally given by \(F(x,t,u)=0\), with \(x,t,u>0\), for some smooth function F. Assume further that \(F_x\) is nonvanishing, so that M is given locally by \(x=\rho (t,u)\), for some nonvanishing smooth function \(\rho \). Observe that contact condition (3) can be written as: \(y'=\epsilon x'\sinh \nu \) and \(z'=\epsilon x'\cosh \nu \). Similarly to Sect. 4.1, we can take the change of variables from (x, y, z) to \((t,u,\beta )\) (with t as the new independent variable) in order to reduce the system (6) to a first order ordinary differential equation together with a quadrature:
The corresponding solutions are then given by \({\hat{\Gamma }}=(\Gamma ,{{\,\textrm{span}\,}}\{\Gamma '\})\), with
4.3 Invariance under boosts of lightlike axis
Consider the lightlike vectors \(\vec {p}:=\frac{1}{\sqrt{2}}(\vec {e}_{2}+\vec {e}_{3})\) and \(\vec {q}:=\frac{1}{\sqrt{2}}(\vec {e}_{2}-\vec {e}_{3})\) of \(\mathbb {R}^{2,1}\). Let \(H=\{R^{\alpha }:\alpha \in { \mathbb {R}}\}\) be the one-parameter subgroup of boosts with axis \(E=\textrm{span}\{\vec {p}\}\). Parametrize \(\mathbb {P}(\mathcal {L})\setminus { \{{{\,\textrm{span}\,}}\{\vec p\}\}}\) by
The action of H on \(\mathbb {R}^{2,1}\times {(\mathbb {P}(\mathcal {L}){\setminus }\{{{\,\textrm{span}\,}}\{\vec p\}\})}\) is given by
with infinitesimal generator \(\textbf{v}:=z\frac{\partial }{\partial x}-x\frac{\partial }{\partial y}+\frac{\partial }{\partial \mu },\) which admits the following complete set of functional invariants
on the open set \(z\ne 0\). For \(\beta :=\frac{x}{z}\), we have \(\textbf{v}(\beta )=1.\) The submanifold M is then locally given by \(F(z,t,u)=0\), with \(z\ne 0\), for some smooth function F. Assume further that \(F_z\) is nonvanishing, so that M is given locally by \(z=\rho (t,u)\), for some nonvanishing smooth function \(\rho \). The contact condition (3) can be written as: \(x'=z'\mu \), \(y'=-z'\frac{\mu ^2}{2}\). Similarly to Sect. 4.1 and Sect. 4.2, we can take the change of variables from (x, y, z) to \((t,u,\beta )\) (with t as the new independent variable) in order to reduce the contact condition to a first order ordinary differential equation (21a) for u together with a quadrature (21b):
The corresponding solutions of Problem 3.2 are then of the form \(\hat{\Gamma }=(\Gamma , {{\,\textrm{span}\,}}\{\Gamma '\})\), with
5 The contact condition
Next we give a coordinate-free description of the contact condition (3) in terms of an appropriate local contact 3-form.
Throughout this section we will assume that \(M\subset \mathbb {R}^{2,1}\times \mathbb {P}(\mathcal {L})\) is locally the graph of a smooth map \(\psi :U\rightarrow \mathbb {P}(\mathcal {L})\) defined on an open subset U of \(\mathbb {R}^{2,1}\). For each vector field \(X:U\rightarrow \mathbb {R}^{2,1}\) on U, \({\hat{X}}:=(X, d\psi (X))\) is a local vector field on M. Given \(\xi :U\rightarrow \mathcal {L}\) such that \(\psi ={{\,\textrm{span}\,}}\{\xi \}\) (such lifts always exist locally), consider the local one-form \(\omega _\xi \in \Omega ^1(M)\) defined by
Proposition 5.1
The one-form \(\omega _\xi \) is a local contact form on M if, and only if,
Proof
Without loss of generality, we may assume that \(\xi \) is of the form \(\xi =(\cos \theta , \sin \theta , 1)\), for some smooth function \(\theta \) on U, because \(\omega _\xi \) is a contact form if, and only if, for any smooth nonvanishing function \(\lambda \) on U, \(\omega _{\lambda \xi }\) is a contact form. Set \(\omega =\omega _\xi \). A direct computation shows that
Set \(\eta = (-\sin \theta , \cos \theta ,0)\), and \(\zeta =(\cos \theta , \sin \theta ,-1).\) The vector fields \({\hat{\xi }},{\hat{\eta }},{\hat{\zeta }}\) form a frame on M. Since \(\omega ({\hat{\xi }})=\omega ({\hat{\eta }})=0\) and \(\xi \cdot d\xi =0\), we obtain
So, \(\omega \) is a contact form if, and only if, \(\eta \cdot d\xi (\xi )\) is nonvanishing. Since \(\xi ^\perp =\textrm{span}\{\xi ,\eta \}\) and \(d\xi (\xi )=(\eta \cdot d\xi (\xi )) \,\eta \), the result follows. \(\square \)
Remark 5.2
In terms of the coordinates x, y, z on \(U\subset \mathbb {R}^{2,1}\), we have \(\omega _\xi =\cos \theta \,dx+\sin \theta \, dy-dz\), for \(\xi =(\cos \theta ,\sin \theta ,1)\).
Assume that the one-form \(\omega _\xi \) given by (22) is a local contact form on M. Let \(\Gamma \) be a regular integral curve of \(\psi \) (interpreted as a distribution), i.e., \(\Gamma \) is a regular curve in U satisfying \(\psi (\Gamma )={{\,\textrm{span}\,}}\{\Gamma '\}\). Then the curve \({\hat{\Gamma }}:=(\Gamma ,\psi (\Gamma ))\) in M is a Legendre curve (with respect to the local contact structure induced by \(\omega _\xi \)) satisfying
Conversely, we have the following:
Proposition 5.3
Assume that the one-form \(\omega _\xi \) given by (22) is a local contact form on M. Let \(\hat{\Gamma }=(\Gamma ,\psi (\Gamma ))\) be a (regular) Legendre curve in M satisfying (23). Then \(\Gamma \) is a null curve in \(U\subset \mathbb {R}^{2,1}\) such that \(\psi (\Gamma )={{\,\textrm{span}\,}}\{\Gamma '\}\) and \(\Gamma '\wedge \Gamma ''\) is nonvanishing.
Proof
From (23), we clearly have \(\psi (\Gamma )={{\,\textrm{span}\,}}\{\Gamma '\}\) (in particular, \(\Gamma \) is a null curve). Hence \(\Gamma '=\mu (\xi \circ \Gamma )\), for some smooth nonvanishing function \(\mu \), which implies
Since \(\omega _\xi \) is a contact form, by Proposition 5.1, \((\xi \circ \Gamma )\wedge d\xi (\xi \circ \Gamma )\) is nonvanishing, and the result follows. \(\square \)
Hence, apart certain degeneracies, the contact condition (3) is equivalent to (23).
Remark 5.4
Suppose that the smooth map \(\psi :U\rightarrow \mathbb {P}(\mathcal {L})\) is constructed from a function \(\kappa \) on an open subset of the Euclidean plane by applying the procedure we have described in this paper. If \(\omega _\xi \) given by (22) defines a local contact form on M, which locally is the graph of \(\psi \), then a curve \(\hat{\Gamma }=(\Gamma ,\psi (\Gamma ))\) in M satisfying (23) produces a null curve \(\Gamma \) which is, by Proposition 2.1 and Proposition 5.3, the L-evolute of a plane curve with nonvanishing curvature function and no vertex points (i.e. the plane curve intersects transversally the level curves of \(\kappa \)).
Finally, observe that, if \(g=((\lambda ,A),\textbf{t})\in \textrm{Sim}(2,1)\), then \(g M={\tilde{M}}\), where \({\tilde{M}}\) is the graph of the smooth function \({\tilde{\psi }}:gU\rightarrow \mathbb {P}(\mathcal {L})\) given by
Consider the lift \({\tilde{\xi }}=A\,\xi \circ g^{-1}\) of \({\tilde{\psi }}\). The following proposition is a direct consequence of the definitions:
Proposition 5.5
With the notations above, the one-form \(\omega _\xi \) is a contact form on M if, and only if, \(\omega _{{\tilde{\xi }}}\) is a contact form on \({\tilde{M}}\). In this case, we have the following:
-
(a)
\(g:(M,\omega _\xi )\rightarrow ({\tilde{M}},\omega _{{\tilde{\xi }}})\) is a contact diffeomorphism;
-
(b)
the curve \(\hat{\Gamma }=(\Gamma ,\psi (\Gamma ))\) in M is a Legendre curve satisfying (23) if, and only if, the curve \(g{\hat{\Gamma }}\) in \({\tilde{M}}\) is a Legendre curve satisfying (23) with respect to \({\tilde{\xi }}\).
References
Bittencourt, J.E.: Fundamental of Plasma Physics, 3rd edn Springer, New York (2004)
Miura, T.: Elastic curves and phase transitions. Math. Ann. 376, 1620–1674 (2020)
Singer, D.: Lectures on Elastic Curves and Rods. AIP Conf. Proc. 1002, 3 (2008)
Eells, J.: The surfaces of Delaunay. Math. Intell. 9, 53–57 (1987)
López, R., Pámpano, A.: Stationary soap films with vertical potentials. Nonlinear Anal. 215, 112661 (2022)
Castro, I., Castro-Infantes, I.: Plane curves with curvature depending on distance to a line. Differ. Geom. Appl. 44, 77–97 (2016)
Singer, D.: Curves whose curvature depends on distance from origin. Am. Math. Mon. 106, 835–841 (1999)
Berger, A.: On planar curves with position-dependent curvature. J. Dyn. Differ. Equ. (2022). https://doi.org/10.1007/s10884-022-10168-9
Castro, I., Castro-Infantes, I., Castro-Infantes, J.: Curves in the Lorentz–Minkowski plane with curvature depending on their position. Open Math. 18, 749–770 (2020)
Bor, G., Jackman, C., Tabachnikov, S.: Variations on the Tait–Kneser theorem. Math. Intell. 43(3), 8–14 (2021)
Nolasco, B., Pacheco, R.: Evolutes of plane curves and null curves in Minkowski 3-space. J. Geom. 108(1), 195–214 (2017)
Pacheco, R., Santos, S.D.: Evolutes of curves in the isotropic plane and null curves (in preparation)
Salvai, M.: Centro-affine invariants and the canonical Lorentz metric on the space of centered ellipses. Kodai Math. J. 40(1), 21–30 (2017)
Cecil, T.E.: Lie Sphere Geometry. Universitext, Springer, New York (1992)
Olver, P.: Applications of Lie Groups to Differential Equations, p. xxvi+497. Graduate Texts in Mathematics, 107. Springer-Verlag, New York (1986)
https://mathcurve.com/courbes2d.gb/developpantedecercle/developpantedecercle.shtml
Funding
Open access funding provided by FCT|FCCN (b-on).
Author information
Authors and Affiliations
Corresponding author
Additional information
Publisher's Note
Springer Nature remains neutral with regard to jurisdictional claims in published maps and institutional affiliations.
The authors were partially supported by Fundação para a Ciência e Tecnologia through the projects UIDB/00212/2020 (https://doi.org/10.54499/UIDB/00212/2020) and UIDB/04561/2020 (https://doi.org/10.54499/UIDB/04561/2020).
Rights and permissions
Open Access This article is licensed under a Creative Commons Attribution 4.0 International License, which permits use, sharing, adaptation, distribution and reproduction in any medium or format, as long as you give appropriate credit to the original author(s) and the source, provide a link to the Creative Commons licence, and indicate if changes were made. The images or other third party material in this article are included in the article's Creative Commons licence, unless indicated otherwise in a credit line to the material. If material is not included in the article's Creative Commons licence and your intended use is not permitted by statutory regulation or exceeds the permitted use, you will need to obtain permission directly from the copyright holder. To view a copy of this licence, visit http://creativecommons.org/licenses/by/4.0/.
About this article

Cite this article
Pacheco, R., Santos, S.D. Curves whose curvature depends on their position and null curves. J. Geom. 115, 16 (2024). https://doi.org/10.1007/s00022-024-00716-7
Received:
Revised:
Accepted:
Published:
DOI: https://doi.org/10.1007/s00022-024-00716-7