
Abstract
This research focuses on extensible structures composed of rods and nodes, which have been developed since the mid-twentieth century. A geometric, mathematical, and graphical analysis of simple double-rod scissor structures, and then investigates the three-rod and node structures of architect E. P. Piñero, using digital and parametric modeling.
Similar content being viewed by others

Avoid common mistakes on your manuscript.
Introduction
Since ancient times man has needed to build architectural elements characterized by: mobility, transformability, assembly and disassembly. This need derives from nomadic and warrior peoples who, out of necessity, erected tents, bridges and towers made from rigid and transformable grids. Among these kinematic structures are ‘extensible’ ones: a complex of building elements that move from a closed, cohesive configuration to an ‘extended’-self-supporting one.
B. Fuller, J.W. Schweller, G. Bell, K. Wachsman, E.P. Pinero, and F. Escrig are some architects who experimented with ‘transformable’ structures in the second half of the 20th century.
The aim of the paper is to analyze the structure and ‘primary’ geometries of double-rod scissor structures, and then those with rods and nodes by Emilio Pérez Piñero (1935–1972) through the graphical analysis of a patent by the Spanish architect (Piñero 1961), with the dual methodology: digital modeling as a tool for investigation and visualization of geometries; parametric design software for movement analysis.
The Scissor System for Extensible Structures
Architectural structures made by rods and nodes correspond in figurative terms to geometric relationships through the intersection of the fundamental geometric entities of line and point. This theoretical condition appears applied in constructivist architecture and in modern and contemporary architecture. The resulting works turn out to be in their form defined by Kandinsky as pure or abstract in space (Kandinsky 1926) and which, in becoming matter, take on, according to the artist, a conspicuous character generated by a line-force application energy on a nodal point (Fig. 1a).

a Link between geometric entities and rod and node structures in space according to Wassilly Kandinsky; b scissor structures: transverse movement of a sequence of scissor structure in frontal and perspective view (left); symmetrical, asymmetrical and in-plane scissor structure (right). (Graphic image processing by M. Cicala)
These structures are based on the principle of repetition of a geometric starting module, the joining of which, allows different movements of the final structure. The transition from single units to a group determines the formulation of the extensible system and, where the movement takes place through skillful geometric-mathematical control (Calvo López and Sanz Alarcón 2011). Their analysis, therefore, requires knowledge and control tools through parametric modeling systems for the investigation of shape, number of rods and nodes, directions, and degrees of movement.
Extensible structures have two different geometric configurations: one extended (open) and one retracted (closed) (Fig. 1b on the left). The transition from open to closed configuration can be made by sliding (translation), rotating, bending, or by a combination of the same. The important requirements for the perfect fabrication of this structure are ease of fabrication and structural stability over large areas where they will assume an open configuration that also serves, at times, as a cover for the space.
The most common type of extensible structure is the scissor type with double rods, which allows for foldable membranes on rigid supports. Each rod consists of three restraints, an upper and a bottom one, determining the continuity of the structure and, finally, a joining bond between the two rods. The union of multiple elementary scissor structures determines the configuration of modular one-degree-of-freedom structures consisting of the angle of rotation around the middle hinge. As for the node, however, three different configurations and types of ties can be obtained: translation, polar, angled (Fig. 2c).

a Geometric definition of scissors generating linear and curved course and related internal geometries generated; b parametric construction of a simple scissor structurein Grasshopper for Rhino; c the different patterns of scissor bonds: plane, curved, polar and angled translation system. (Parametric modeling and graphic image processing by M. Cicala)
According how the rods are arranged, different interior geometries are generated in relation to movement, which are defined by regular or irregular quadrilaterals or deltoids: regular quadrilaterals for linear deployment; deltoids with two sets of consecutive congruent sides for variable curvature deployment; irregular quadrilaterals for curvature systems that can’t flexed (Torres 2013) (Fig. 2a).
These structures joined sequentially together enable the composition of extensible flat structures of any shape provided there is a compatibility relationship between the bars. For the structure to be flat the condition must be: c/a = d/b; for it to be collapsible must be: c + d = e + e = 2e (Fig. 1b on the right). Thus the 'scissors' all extend along the direction of development.
The analysis of the kinematic mechanism of double-rod scissor structures follows the geometric analysis of the isosceles triangles that are formed, which will, again, turn into rhombs in case of a multi-stage scissor mechanism both horizontally and vertically (Cheng et al. 2014). Given the scissor structure (Fig. 3) that has \(\theta \prime = \theta \prime \prime\) and DOC determining an isosceles triangle, we will have that\({l}_{co}=l/2={l}_{od}\), in a given length of L on which h will depend. Applying the Pythagorean Theorem on the basic triangle will have:

Linear transverse motion analysis of a scissor structure with related geometric construction. (Graphic image processing by M. Cicala Graphic)
From here, considering \({\theta }^{^{\prime}}\) and given the ratio of the cathetus opposite the angle α to the hypotenuse, we will have:
This formula demonstrates the dependence relationship between the length, height and angle of rotation, respectively, where it is shown that h varies in relation to the change in the angle between the cathetus and the hypotenuse (Fig. 3).
Shape Grammar and Parametric Analysis of Rod and Node Structures by E. P. Piñero
Emilio Pérez Piñero is a precursor of scissor structures. From 1961 he dedicated himself to the development of flat grids and domes for temporary pavilions (Escrig 1993) (Fig. 4a). Geometrically, the insertion of an additional bar in the central node is the first significant transition from double scissor structures to Piñero’s extensible structures, referring back to the mechanism of the ‘hunter’s chair’ (Fig. 4b).

a Summary images of Piñero’s extensible structures, from physical models to digital parameterization; b from the three-rod ‘hunter’s chair’ to Piñero’s rod and joint meshes; c detail drawings of the types of nodes patented by the architect. (Modeling and graphic image processing by M. Cicala)
In their movement, these modules can be bent and unfolded, either for a simple structure or composed of several modules. Through the unfolding of a straight module that results in a flat grid, with a change in the lengths of the top and bottom sections of the bars, a module is obtained that generates a curved surface.
Principal among the architect’s patents is Patent US3185164 of 1961. The folding three-dimensional reticular structure of this is given by a system of rods connected through pivoting joints. These rods can be distributed in three-dimensional space by deploying until their connections result in an easily transportable closed compact bundle of straight lines.
For this condition to happen, design components assume considerable importance. The rods, nodes, joints, and possible connections between them are the basis of the geometric configurations of opening and closing.
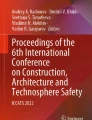
Regarding nodes, we can consider two types: closed and open, both connecting between modules of structures and with a 6 mm thickness. Then there are the ‘three nodes’ that consist of a central node and three rods, in addition to anchor bolts, the distance between the rods is given by angles of 120°. Also, there are the ‘four knots’ formed by four rods anchored by bolts whose distance gives angles of 90° (Figs. 4c; 5a, b).

Views of three-dimensional models Piñero’s patent. a and b the two types of nodes at three and four rod knots; c three-dimensional views of the possible combinations of rods and nodes, patented by the architect, d three-dimensional views of the flat and curved spatial structures. (Modeling and graphic image processing by M. Cicala)
For rods, the composition of which is based on the decomposition of basic polyhedra, these can be three or four noded, which must be placed in the equidistant direction for flat structures and, ‘free’, (not equal) for curved structures (Fig. 5d). From the different combinations of rod types it’s possible to generate simple, double, multiple, semi-cylindrical, and hemispherical structures (Fig. 5c).
The system of Piñero’s basic module is given by three rods articulated in a central joint inscribed in a prism given by bases of equilateral triangles (De Miguel 1972; Ródenas-López et al. 2018), that is, the two Platonic solids (the regular tetrahedra) whose intersection of one of the vertices flows into the central node of the module of the structure. In contrast, the second system has four rods that meet in the central pivot inscribed in square-based prism, that is, two regular pentahedra. The condition in which scissor structures are simply inscribable in a prism and, do not generate solid geometries, occurs when a simple scissor system is placed along the surfaces of the sides of the prism and articulated along the midpoint. This condition will be successive to Piñero and occur in F. Escrig’s structures (Valcárcel 2019).
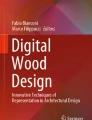
For the movement investigation of the architect’s basic three-rod module, the use of modeling in a digital environment is insufficient except for the geometric knowledge of the individual components (Fig. 6a). Therefore, it was necessary to use parametric modeling with Grasshopper for Rhino software (Fig. 2b) and, specifically, through the Kangaroo plug-in (Figs. 6b, c), which can manage by algorithm the interactions and dynamism of the module components.

a Geometry of Piñero’s patented three-rod base module geometry and modeling with repetition of the base module in the plane; b Piñero’s and Escrig’s base modules processed by Grasshopper for Rhino algorithm and respective modular repetition; c Piñero’s base module processed by Grasshopper for Rhino through the use of the Kangaroo plug-in whose algorithm is reported (Simple and parametric modeling and, graphic image processing, by M. Cicala)
This operation allowed us to define the movements of the rods and nodes in different variables and study the various geometries of the modules in relation to the rods and source nodes.
There are two parameters that affect the geometric characteristics of the structure under open or closed conditions: the number of rods encountered in an assemblage and the equality and inequality relationship of the distances of each intermediate coupling of each rod (Piñero 1961). The first case influences the geometric shape of the configuration in the plane: if three rods concur at each conjunction, the contour explained will take the shape of a hexagon (Fig. 6); if four rods concur, the configuration will be quadrangular (Fig. 6b). In the second parameter, if the intermediate rod ratio is equidistant from the other two extremes (top and bottom), the structure has no curvature. This means that overall and ignoring the height, the structure is flat, that is, the series of repeated modules with equal characteristics belong to parallel planes. In opposition, if the intermediate coupling is not equidistant to the other two, the open structure defines a curved configuration, that is, the rod couplings lie on one of the three curved surfaces.
Conclusions
From simple scissor lattice structures, to the Egyptian chair, to the hunter’s chair, as examples of extensible structures, the progress these have made has been considerable. The aim here was to highlight how much the apparent simplicity of these structures springs from and results in different geometric conformations derived from mathematical calculations.
The grammatical and syntactic study of the forms of the scissor structures and, of Piñero’s extensible structures, turns out here to be a first cognitive approach oriented to a subsequent application of these extensible structures not used as an autonomous element of new construction, but as an architectural support of cultural heritage enhancement. Specifically, for the enhancement of slender architectures (Zerlenga et al. 2021), this topic is part of a broader research aimed at enhancing the value of contemporary Neapolitan bell towers, built before anti-seismic regulations and, therefore, subject to architectural vulnerability in case of natural disasters.
References
Calvo López José, Sanz Alarcón Juan Pedro 2011. Architectura plegable para una dècada prodigiosa. La ombra de Emilio Pèrez Pinero y la arquitectura de los anos sesenta. In revista Expresìon gràfica arquitectònica, EGA 2011: pp. 114-126.
Cheng Yin, Shengqi Jian, Rolland Luc, Md Toufiqul Islam 2014. Dynamic analysis of Scissor Lift mechanism through bond graph modeling. In IEEE/ASME International Conference onAdvanced Intelligent Mechatronics (AIM) July 8–11, 2014. Besançon, France
De Miguel González Carlos 1972. Emilio Pérez Piñero, Premio Auguste Perret. In (eds.) de Inza, F., Amézqueta, A. G., Bayòn, M., F. Longo ria, Sàenz, F. Revista Arquitectura, Publicacion mensual del Colegio official de Arquitectos de Madrid, n. 162–163, Julio-August 1972
Emilio Pérez Piñero 1961. Three Dimensonal Retecular Structure, Perez Galdos St., Riadrid, Spaia Filed Nov. 15, 1961, Ser. No. 52,567 Claims priority, application Spain, Apr. 21, 1961, 266,861 7 Caias. United States Patent Office. https://patentimages.storage.googleapis.com/8c/d3/c4/65db16358905f9/US3185164.pdf
Escrig, Felix 1993. General survey of deployability in architecture. Mobile and Rapid y Assembled Structures II. In (eds.) Escrig & Brebbia. Computational Mechanics Pub. Southampton
Kandinsky, V 1926. Punto, linea, superficie. Contributo all'analisi degli elementi pittorici. Milano: Adelphi editions. Reprint 2021
Ródenas-López, Manuel Alejandro, Martínez Pedro García, Jiménez Vicario Pedro Miguel, Pérez Adolfo Egea, Fernández Serrano Martino Peña 2018, Parametric Design Applied to Analysis and Optimization of Spatial Deployable Structures. In (eds.) William, K., Bevilacqua, G., International Conference Architecture and Mathematics, Nexus 2018, Pisa, 11–14 June 2018, Italy
Valcárcel, Juan Pérez 2019. La obra arquitectónica de Emilio Pérez Piñero. In BAc Boletín Académico Revista de investigación y arquitectura contemporánea. Torres, Natalia 2013. Desarrollo de un escenario desplegable basado en la aplicación de estructuras tipo tijera, sistema de plegadura y membranas. New proposal for transformable architecture, engineering and design. In honor of Emilio Pérez Piñero. First Conference Transformable Proceedings, 125–130
Zerlenga Ornella, Cirillo Vincenzo, Cicala Margherita, & Miele Riccardo 2020. Naples represented by its bell towers. A case study: the PREVENT project. In (eds.): Maria Ines Pascariello e Alessandra Veropalumbo, La Città Palinsesto. Tracce, sguardi e narrazioni sulla complessità dei contesti urbani storici, Tome II, 9th International Study Conference CIRICE 2021, 10–12 giugno 2021, Naples: Federico II University Press: pp. 419–430
Funding
Open access funding provided by Università degli Studi della Campania Luigi Vanvitelli within the CRUI-CARE Agreement.
Author information
Authors and Affiliations
Contributions
This paper is the result of shared work. the Introduction paragraph is ascribed to OZ; paragraph 1 to VC; and paragraphs 2 and Conclusions to MC.
Corresponding author
Additional information
Publisher's Note
Springer Nature remains neutral with regard to jurisdictional claims in published maps and institutional affiliations.
Rights and permissions
This article is published under an open access license. Please check the 'Copyright Information' section either on this page or in the PDF for details of this license and what re-use is permitted. If your intended use exceeds what is permitted by the license or if you are unable to locate the licence and re-use information, please contact the Rights and Permissions team.
About this article

Cite this article
Zerlenga, O., Cirillo, V. & Cicala, M. Drawing, Shapes and Parametric Design of Rod and Node Architectural Structures. Nexus Netw J 25 (Suppl 1), 303–311 (2023). https://doi.org/10.1007/s00004-023-00722-3
Accepted:
Published:
Issue Date:
DOI: https://doi.org/10.1007/s00004-023-00722-3