
Abstract
Resonant pressure sensors have high accuracy and are widely used in meteorological data acquisition, aerospace and other fields. The design and experiment of multi-channel pressure data acquisition system based on resonant pressure sensor, which used for the flush air data sensing(FADS) system, are described. The hardware architecture of DSP and FPGA is applied to the data acquisition system. The digital cymometer and 16-bit analog-to-digital converter are used to measure the output signal of the sensor. It is shown the data acquisition system has favourable performance within the operating temperature range. The maximum experimental error is less than 0.02%FS over the range 2–350 kPa. The period of sampling and fitting is less than 8 ms. The frequency and voltage measurements meet accuracy requirements. The calculated pressure and standard pressure result appears excellent linearity, which reach up to 0.9999.
You have full access to this open access chapter, Download conference paper PDF
Similar content being viewed by others


Keywords
1 Introduction
Atmospheric data parameters include dynamic pressure, static pressure, Mach number, angle of attack, and sideslip angle and other parameters related to the airflow environment of the aircraft during flight [1]. The measurement of atmospheric data is of great significance to the attitude control and structural design of hypersonic vehicles. For example, the design of the air intake and tail nozzle of the aircraft is closely related to the Mach number and the angle of attack. In the overall design of the compression ignition ramjet, the dynamic pressure and the angle of attack are also two important parameters. At present, the measurement of atmospheric data mainly adopts the Flush Air Data Sensing system (FADS) [2], which depends on the design of the pressure sensor array to measure the pressure distribution on the surface of the aircraft head or other local positions, and converts the pressure data through a specific solution algorithm mode l [3]. Measure and obtain atmospheric parameters during flight (Fig. 1).

Pressure measuring hole for FADS on aircraft nose
The FADS system mainly uses IPT (Integrated Pressure Transducer) to obtain incoming flow pressure data. IPT is a MEMS pressure sensor, and its working principle has undergone the evolution process of piezoresistive, capacitive and resonant [4,5,6]. The IPT of Honeywell of the United States integrated a piezoresistive pressure sensor with both pressure and temperature sensitive components. It was smart and had an accuracy of 0.03% FS. It was also equipped with EEPROM for the storage of the correction factor of the sensor, without additional pressure and temperature calibration [7]. The accuracy of the pressure sensor integrated in the ADP5 five-hole PTV tube of Simtec Buergel AG in Switzerland was up to 0.05% FS, but it was not calibrated at high Mach numbers. The temperature compensation range was −35 ºC–+55 ºC. At −40 ºC–+70 ºC, the performance would decrease. A resonant pressure sensor was integrated in an air data test instrument of GE DRUCK, which had an accuracy of 0.02% FS and an operating temperature of 0 ºC–50 ºC.
With the continuous development of modern aircraft in the direction of high maneuverability and hypersonic speed [8], it is necessary to obtain more accurate atmospheric data parameters during a wider temperature range. So we chosen the resonant pressure sensor. The resonant pressure sensor measures pressure indirectly by detecting the natural frequency of the object [9]. It has the characteristics of high sensitivity and high accuracy, and is suitable for calculation of atmospheric data in flight tests [10].
In order to further study the FADS system, the pressure measurement is required to achieve a stable accuracy of 0.02%FS over the full operating temperature range (−40 ºC–+80 ºC) and the calculation time of pressure should less than 10 ms. This paper has designed a multi-channel pressure data acquisition system based on a self-developed silicon resonant pressure sensor and a hardware architecture scheme of DSP and FPGA. The data acquisition system shows excellent performance on the ground experimental platform.
2 System Structure
The principle of the multi-channel pressure data acquisition system based on resonant pressure sensor is shown in Fig. 2. It mainly consists of power supply module, ADC data acquisition module, main control module and RS422 communication module. The entire acquisition system realizes the preprocessing and acquisition of the output signal of the resonant sensor, the filtering and fitting of data, and the communication function of the host computer.

Overall architecture of the acquisition system
2.1 Sensor
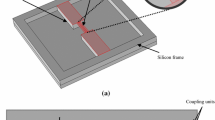
The selected sensor is shown in Fig. 3. Its pressure measurement range is absolute pressure 2 kPa to 350 kPa, working temperature −40 ºC to 80 ºC. The accuracy and annual stability are better than 0.02%FS. The output signal of the sensor is TTL square wave signal and the voltage signal. TTL square wave signal is related to pressure, and its frequency output range is 25–35 kHz. The voltage signal is related to temperature, and its output range is 400–700 mV. The TTL square wave signal and the voltage signal are fitted into the pressure value through the temperature compensation polynomial (1)
where Pc is the calculated pressure value, Cij is the fitting coefficient, f is the sensor output frequency, and V is the sensor output voltage [11], m and n are fitting orders, generally, n = 5 and m = 4.

Resonant pressure sensor and its sensitive core.
2.2 Main Control Module
According to the functional requirements of the data acquisition system, in order to improve the real-time performance of data acquisition and calculation, DSP+FPGA was used as the main control architecture [12]. The structure of the main control module is shown in Fig. 4. The FPGA completes the timing control of the ADC and the frequency measurement of the square wave signal output by the sensor, and the DSP completes the software filtering of the collected data, temperature compensation fitting and RS422 communication with the host computer. This module used TI C674x series 32-bit floating-point DSP. System clock was 456 MHz. The EMIFA bus of the DSP was connected to the FPGA device and FPGA called a dual-port RAM IP core to realize data interaction between FPGA and DSP.

Main control module.
2.3 Analog-to-Digital Conversion Module
The analog-to-digital conversion uses two 8-channel 16-bit analog-to-digital conversion chips AD7689, which use an external 2.048 V reference voltage. Its input mode is unipolar input. The output voltage signal of the pressure sensor is preprocessed by the two-stage op amplifier and then connected to the analog-to-digital conversion. AD7689 uses a serial port interface and is driven FPGA after passing through a digital isolation chip (Fig. 5).

Analog-to-digital conversion circuit diagram.
3 Software Design
3.1 Principle of Signal Acquisition.
Sensitivity of the sensor is 28.4 Hz/Kpa. In order to ensure the consistency of the measurement accuracy within the output range of the measurement sensor’s frequency signal, and eliminate the ±1 error caused by directly counting the measurement signal, the period method is used to measure the sensor’s frequency signal [13, 14]. The principle is shown in Fig. 6. The gating time T is an integer multiple of the measured single fx. The gating time T is Ns clock cycles of fx. The reference clock fs numbered during the gating time T is Nx. Then,
Ignoring the error of the reference clock itself, the measurement error comes from the ±1 error generated by counting the reference signal. The relative error σ shows below.

Principle of frequency acquisition.
When the sampling frequency is 50 Hz, the frequency sampling time should be less than 10 ms. The gating time is 200 clocks of fx, and the reference clock is 50 MHz temperature-compensated crystal oscillator. In the case of sensor output frequency fx = 30000 Hz, we can get:
The count value of the reference clock is 333333 or 333334, which converted for 30000.03 Hz or 29999.94 Hz. The error is less than 0.0002%, which meets the measurement requirements.
3.2 Collection Process
The main program flow chart is shown in Fig. 7 below. After the system is powered on, the initialization operation is performed, the DSP enables IO, peripherals, UART and timer modules, and after the host computer collects the command, the FPGA triggers the ADC drive timing, and at the same time starts to measure the frequency, voltage and frequency of the TTL square wave After the measurement is completed, the FPGA writes the data into the dual-port RAM [15], the data writing is completed and the DSP external interrupt is triggered, and the DSP starts to read the data; after the acquisition is completed, the DSP first preprocesses the read data, including data outlier removal and removal After the filtering is completed, the collected signal is converted in the DSP first, and the converted result is brought into the temperature compensation polynomial fitting to synthesize the measured pressure. After the fitting is successful, the DSP sends the data to the RS422 interface. Host computer control system. The DSP completes the calculation in less than 1 ms at the system clock of 456 MHz. Digital cymometer and ADC needs no more than 7 ms. Therefore, a collection calculation period is less than 8 ms, which meets the requirement.

System acquisition flowchart.
4 Experiments
The multi-channel data acquisition board and host machine is shown in Fig. 8. All channels were connected in parallel to the same sensor for easy connection and testing. In order to verify the acquisition system, a measurement platform was built based on the ground standard pressure source. The test frame is shown in Fig. 9. Pressure controller is a commercial instrument (GE DRUCK PRS8000),which has the accuracy of 0.01%FS. The thermostatic controller (GF ITH-150) is used to stabilize operation environment. After working for 2.5 h, the temperature fluctuation during the measurement is about 0.1 ºC. The board’s DC power supply is +28 V. The Agilent logic analyzer is used to obtain sensor output parameters. Static measurement is carried out to plot frequency to pressure at different temperatures. The pressure sensor and the board are put inside the thermostatic controller.

Multi-channel data acquisition board and host machine.

Experiment platform. a. DC power; b. Logic analyzer; c. Thermostatic controller; d. Pressure controller; e. Acquisition board; f. Resonant pressure sensor.

Fitted pressure surfaces for sensor output frequencies and voltages.

Full range error under different pressure and temperature points (2 to 350 kPa and −40 to 80 ºC).
The setting temperature range of the thermostatic control box is −40 to 80 ºC. Pressure sampling is taken every 10 ºC for a measuring time of more than 2 h. The data for each point is an average of 100 repeated measurements. The fit of the frequency and voltage is shown in Fig. 10. The uniform surface transition shows that there is a good regularity between the output frequency and the pressure and temperature load. Figure 11 shows the fitting residual. The max error is 0.018%FS, better than 0.02%FS.
The relation between frequency response and applied pressure, which measured at 20 ºC, is shown in Fig. 12. The measurement result of the acquisition board is highly in agreement with the performance of the logic analyzer. The frequency error for each measuring point is listed in Fig. 13. The upper and lower margins of error are 0.1718 Hz and −0.0777Hz, which meets the measurement demands of the system.
The system’s hysteresis characteristic test curve is shown in the Fig. 14. The forward and reverse fitting results were consistent, which were agreement with the standard pressure. The forward coefficient of determination is 0.999994 and the reverse coefficient of determination is 0.999975.

Frequency under different pressure at room 20 ºC.

Error of frequency for each measuring point.

Forward and reverse fitting results
The coefficient of determination of the 10 repeated experiments is listed in the table below. The coefficient of determination were all better than 0.9999. The exceptional goodness of fit means high measurement accuracy, which indicates our data acquisition system is reliable and stable (Table 1).
5 Conclusion
This article has demonstrated a multi-channel data acquisition system for measuring the pressure of resonant pressure sensors, whose hardware architecture is based on DSP and FPGA. Digital cymometer and high resolution analog-to-digital converter make the system performed with high measurement accuracy. Experiments showed that the maximum measurement relative error of the sensor output frequency signal is only 0.1718 Hz. The full range error is less than 0.02%FS within the operating temperature range. The measurement is repetitive and there is no hysteresis phenomenon. As such, our multi-channel system is reliable, which can provide accurate data for FADS calculating.
References
Angelo, L., Manuela, B.: Safety analysis of a certifiable air data system based on synthetic sensors for flow angle estimation †. Appl. Sci. 11(7), 3127 (2021)
Jiang, X., Li, S., Huang, X.: Radio/FADS/IMU integrated navigation for Mars entry. Adv. Space Res. 61(5), 1342–1358 (2018)
Karlgaard, C.D., Kutty, P., Schoenenberger, M.: Coupled inertial navigation and flush air data sensing algorithm for atmosphere estimation. J. Spacecraft Rockets. 54, 128–140 (2015)
Song, P., et al.: Recent progress of miniature MEMS pressure sensors. Micromachines 11(1), 56 (2020)
Nag, M., Singh, J., Kumar, A., Alvi, P.A., Singh, K.: Sensitivity enhancement and temperature compatibility of graphene piezoresistive MEMS pressure sensor. Microsyst. Technol. 25(10), 3977–3982 (2019). https://doi.org/10.1007/s00542-019-04392-5
Samridhi, M.K., et al.: Stress and frequency analysis of silicon diaphragm of MEMS based piezoresistive pressure sensor. Int. J. Modern Phys. B 33(07), 1950040 (2019)
Hu, B., Liu, X.J.: Design and research of multi-channel temperature calibration system based on the LabVIEW. Adv. Mater. Res. 1362, 241–246 (2011)
Xiaodong, Y., Shi, L., Shuo, T.: Analysis of optimal initial glide conditions for hypersonic glide vehicles. Chin. J. Aeronaut. 27(02), 217–225 (2014)
Radosavljevic, G.J., et al.: A wireless embedded resonant pressure sensor fabricated in the standard LTCC technology. IEEE Sens. J. 9(12), 1956–1962 (2009)
Alcheikh, N., Hajjaj, A.Z., Younis, M.I.: Highly sensitive and wide-range resonant pressure sensor based on the veering phenomenon. Sens. Actuators, A 300, 111652 (2019)
Du Xiaohui, L.W.A.L.: High accuracy resonant pressure sensor with balanced-mass DETF resonator and twinborn diaphragms. J. Microelectromech. Syst. 99, 1–11 (2017)
Haowen, T., et al.: Design and implementation of a real-time multi-beam sonar system based on FPGA and DSP. Sensors 21(4), 1425 (2021)
Pardhu, T., Harshitha, S.: Design and simulation of digital frequency meter using VHDL. In: International Conference on Communications & Signal Processing, pp. 704–710 (2014)
Lenchuk, D.V.: Simulation of error analysis in a digital frequency meter for meteorological signals. Telecommun. Radio Eng. 57(2–3), 18 (2002)
Hidaka, H., Arimoto, K.: A high-density dual-port memory cell operation and array architecture for ULSI DRAM’s. IEEE J. Solid-State Circuits 27(4), 610–617 (1992)
Author information
Authors and Affiliations
Corresponding author
Editor information
Editors and Affiliations
Rights and permissions
Open Access This chapter is licensed under the terms of the Creative Commons Attribution 4.0 International License (http://creativecommons.org/licenses/by/4.0/), which permits use, sharing, adaptation, distribution and reproduction in any medium or format, as long as you give appropriate credit to the original author(s) and the source, provide a link to the Creative Commons license and indicate if changes were made.
The images or other third party material in this chapter are included in the chapter's Creative Commons license, unless indicated otherwise in a credit line to the material. If material is not included in the chapter's Creative Commons license and your intended use is not permitted by statutory regulation or exceeds the permitted use, you will need to obtain permission directly from the copyright holder.
Copyright information
© 2022 The Author(s)
About this paper

Cite this paper
Fan, X., Mao, H., Zhu, C., Wu, J., Xu, Y., Wang, X. (2022). Design of Multi-channel Pressure Data Acquisition System Based on Resonant Pressure Sensor for FADS. In: Qian, Z., Jabbar, M., Li, X. (eds) Proceeding of 2021 International Conference on Wireless Communications, Networking and Applications. WCNA 2021. Lecture Notes in Electrical Engineering. Springer, Singapore. https://doi.org/10.1007/978-981-19-2456-9_46
Download citation
DOI: https://doi.org/10.1007/978-981-19-2456-9_46
Published:
Publisher Name: Springer, Singapore
Print ISBN: 978-981-19-2455-2
Online ISBN: 978-981-19-2456-9
eBook Packages: EngineeringEngineering (R0)