
Abstract
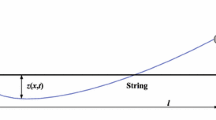
We introduce a control algorithm for vibration isolation in a string-type structure, and we take the nonlinear constraints of input as well as output which often encounter in most physical systems into consideration in this study. The implementation of the proposed controller is achieved by employing the backstepping technique. It is proven by Lyapunov theory that the control scheme is effective to dampen the vibration and cope with the nonlinear constraints of the string system. We show that the system stability can be ensured at the same time. Finally, the simulation results manifest the effectiveness of the control approach.
Access this chapter
Tax calculation will be finalised at checkout
Purchases are for personal use only
Similar content being viewed by others


References
He, W., Jing, Z., He, X.Y., Liu, J.K., Sun, C.Y.: Robust adaptive vibration control for a string with time-varying output constraint. Int. J. Robust Nonlinear Control 28(17), 5213–5231 (2018)
Liu, Z.J., Zhao, Z.J., Ahn, C.K.: Boundary constrained control of flexible string systems subject to disturbances. IEEE Trans. Circuits Syst. II 67(1), 112–116 (2020)
He, W., Ge, S.S.: Robust adaptive boundary control of a vibrating string under unknown time-varying disturbance. IEEE Trans. Control Syst. Technol. 20(1), 48–58 (2012)
He, W., Qin, H., Liu, J.K.: Modelling and vibration control for a flexible string system in three-dimensional space. IET Control Theory Appl. 9(16), 2387–2394 (2015)
Zhao, Z.J., Wang, X.G., Zhang, C.L., Liu, Z.J., Yang, J.F.: Neural network based boundary control of a vibrating string system with input deadzone. Neurocomputing 275, 1021–1027 (2018)
He, W., Ge, S.S.: Vibration control of a flexible string with both boundary input and output constraints. IEEE Trans. Control Syst. Technol. 23(4), 1245–1254 (2015)
Zhao, Z.J., Ahn, C.K., Li, H.-X.: Boundary antidisturbance control of a spatially nonlinear flexible string system. IEEE Trans. Ind. Electron. 67(6), 4846–4856 (2020)
He, W., He, X.Y., Ge, S.S.: Boundary output feedback control of a flexible string system with input saturation. Nonlinear Dyn. 80(1–2), 871–888 (2015)
Zhao, Z.J., Shi, J., Lan, X.J., Wang, X.W.: Adaptive neural network control of a flexible string system with non-symmetric dead-zone and output constraint. Neurocomputing 283, 1–8 (2018)
Zhao,Z.J., He, X.Y., Ahn, C.K.: Boundary disturbance observer-based control of a vibrating single-link flexible manipulator. IEEE Trans. Syst., Man, Cybern.: Syst. in press (2019). https://doi.org/10.1109/TSMC.2019.2912900
Ren, B., Ge, S., Tee, K., Lee, T.: Adaptive neural control for output feedback nonlinear systems using a barrier lyapunov function. IEEE Trans. Neural Netw. 21(8), 1339–1345 (2010)
Zhao, Z.J., Liu, Z.J., Li, Z.F., Wang, N., Yang, J.F.: Control design for a vibrating flexible marine riser system. J. Franklin Inst. 354(18), 8117–8133 (2017)
Acknowledgements
This work was supported in part by the National Natural Science Foundation of China under Grant 61803109, in part by the Innovative School Project of Education Department of Guangdong under Grant 2017KQNCX153, and in part by the Science and Technology Planning Project of Guangzhou City under Grant 201904010494.
Author information
Authors and Affiliations
Corresponding author
Editor information
Editors and Affiliations
Rights and permissions
Copyright information
© 2022 The Editor(s) (if applicable) and The Author(s), under exclusive license to Springer Nature Singapore Pte Ltd.
About this paper

Cite this paper
Zhang, J., Liu, Y., Yang, X., Zhao, Z. (2022). Vibration Control of a String System with Constraints. In: Yan, L., Duan, H., Yu, X. (eds) Advances in Guidance, Navigation and Control . Lecture Notes in Electrical Engineering, vol 644. Springer, Singapore. https://doi.org/10.1007/978-981-15-8155-7_152
Download citation
DOI: https://doi.org/10.1007/978-981-15-8155-7_152
Published:
Publisher Name: Springer, Singapore
Print ISBN: 978-981-15-8154-0
Online ISBN: 978-981-15-8155-7
eBook Packages: Intelligent Technologies and RoboticsIntelligent Technologies and Robotics (R0)