
Abstract
Performance, development and validation of vehicle dynamics applications such as anti-lock braking systems (ABS) or indirect tyre pressure monitoring systems (iTPMS) rely on a sufficiently accurate consideration of tyre properties such as transient dynamics and tyre kinematics. Previous investigations showed that the tyre rotation has a distinct effect on the vertical tyre stiffness as well as on the three characteristic tyre radii, the unloaded, static and effective (dynamic) tyre radius. Based on the fundamentals of the TMeasy 5 handling tyre model, an enhanced semi-physical modelling approach was developed to consider rotational speed dependent tyre stiffness and tyre radii in an effective and numerically efficient manner. In the present study, a detailed experimental validation is conducted to verify, evaluate and validate the previously identified rotational speed induced effects and the developed enhanced modelling approach. Based on the results of an extensive tyre testing series, it is shown that the rotational speed induced tyre behaviour can be taken into account effectively by considering a linear dependence of the vertical tyre stiffness and a non-linear progressive one of the unloaded radius on the rotational speed. The resulting rotational speed induced behaviour of the static and effective tyre radius is approximated with sufficient accuracy by the enhanced model. With the presented semi-physical modelling approach and identified rotational speed induced tyre behaviour, applications such as ABS, iTPMS or driving simulators can be enhanced.
You have full access to this open access chapter, Download conference paper PDF
Similar content being viewed by others


Keywords
- Tyre mechanics
- Semi-physical tyre modelling
- Influence of tyre rotation
- Experimental validation
- Tyre testing
- Flat track tyre test rig
- Vehicle handling dynamics
1 Introduction
Vehicle dynamics applications such as anti-lock braking systems (ABS), stability and traction controls as well as indirect tyre pressure monitoring systems (iTPMS) rely significantly on an accurate description of the kinematic behaviour of a tyre. The fundamental parameter for an accurate description of the kinematics of a rolling tyre is the effective (dynamic) tyre radius. Several works deal with on-line estimation of the effective tyre radius to improve the performance of such vehicle dynamics applications, see e.g. [4, 8]. Additionally, tyre models applied in hardware- and driver-in-the-loop test systems, which are used for the development and testing of the above mentioned systems, have to be numerically efficient and have to consider effects such as transient tyre behaviour or deviations in tyre kinematics with sufficient accuracy, see e.g. [2, 6]. Transient tyre behaviour is also linked to an accurate description of tyre stiffness behaviour.
Previous experimental investigations presented in [11] showed that the rotational speed \(\varOmega \) of a tyre has a distinct effect on the vertical tyre stiffness \(c_z=c_z(\varOmega )\) as well as on the three characteristic tyre radii, the free unloaded \(r_0=r_0(\varOmega )\), the static loaded \(r_\mathrm {s}=r_\mathrm {s}(\varOmega )\) and the effective tyre radius \(r_\mathrm {e}=r_\mathrm {e}(\varOmega )\). These identified influences of the tyre rotation correspond well to other investigation results presented in literature, cf. [1, 9, 12]. Based on these findings and the fundamentals of the semi-physical TMeasy 5 handling tyre model, [7], an enhanced modelling approach was developed to consider the influence of tyre rotational speed on vertical tyre stiffness and tyre radii in an effective semi-physical and numerically efficient manner, see [10, 11]. However, restrictions of the findings of these previous investigations were caused by the application of a drum tyre test rig. The curvature of a drum influences the vertical tyre force transmission, see e.g. [1, 10, 12]. Consequently, the rotational speed induced tyre behaviour should also be investigated on a flat surface to verify, evaluate and validate these experimentally identified effects.
Therefore, the scope of this paper is a detailed experimental validation of the previously identified rotational speed induced effects as well as of the developed enhanced semi-physical modelling approach by means of a tyre testing series conducted on an industrial flat track tyre test rig. With the proposed modelling approach and the identified relations between tyre properties and tyre rotation that are presented in this paper, applications such as ABS, iTPMS or driving simulators can be enhanced, especially to increase accuracy and validity in wider speed ranges.
2 Enhanced Semi-physical Vertical Tyre Force Model
The vertical force transmission \(F_z\) of a tyre on a flat surface can be described as a non-linear function of the vertical tyre deflection \(\mathrm {\Delta }z\) and its derivative \(\mathrm {\Delta }\dot{z}\), the deflection velocity, \(F_z=F_z(\mathrm {\Delta }z,\mathrm {\Delta }\dot{z})\). Therefore, to consider visco-hyper-elastic tyre behaviour, the semi-physical TMeasy 5 handling tyre model, [7], describes the vertical tyre force transmission by a steady-state and a dynamic part
with
The steady-state part \(F_z^\mathrm {S}\) is modelled by a non-linear parabolic function of the tyre deflection \(\mathrm {\Delta }z\) and the dynamic part \(F_z^\mathrm {D}\) by constant viscous damping properties \(d_z\). Additionally, the vertical force is restricted to \(F_z\ge 0\). Neglecting dynamic effects \(|\mathrm {\Delta }\dot{z}|\ll 1\), the vertical tyre force transmission is then described by a non-linear function of the vertical tyre stiffness \(c_z\) and the deflection \(F_z=F_z^\mathrm {S}(c_z,\mathrm {\Delta }z)\). Neglecting tyre camber, the deflection is determined by the unloaded \(r_0\) and static tyre radius \(r_\mathrm {s}\) with \(\mathrm {\Delta }z=r_0-r_\mathrm {s}\). Based on the modelling principle of TMeasy, model parameters are defined at the nominal tyre payload \(F_z^\mathrm {N}\), which can be individually defined in the parameter identification process, and its double \(2F_z^\mathrm {N}\). Therefore, the coefficients \(a_{1,2}\) are determined by the vertical tyre tangent stiffness at the nominal load \(c_{z1}(F_z^\mathrm {N})\) and the tangent stiffness at the double load \(c_{z2}(2F_z^\mathrm {N})\), see [7]. The tangent stiffness is understood as the gradient \(c_z=\mathrm {d}F_z^\mathrm {S}/\mathrm {d}\mathrm {\Delta }z\) in the respective force-deflection operating point.
To consider the rotational speed \(\varOmega \) dependent tyre behaviour in an effective and appropriate manner according to the TMeasy modelling principle, the dependence of the two vertical tyre stiffness parameters \(c_{z1}(F_z^\mathrm {N},\varOmega )\) and \(c_{z2}(2F_z^\mathrm {N},\varOmega )\) on the rotational speed of a tyre is modelled by two linear functions
Additionally, the rotational speed induced variation of the unloaded tyre radius \(\mathrm {\Delta }r_0(\varOmega )\) is modelled by a quadratic function
Thereby, model parameters and tyre characteristics are adapted for arbitrary rotational speeds depending on their values at a nominal rotational speed \(\varOmega ^\mathrm {N}\) and its double \(2\varOmega ^\mathrm {N}\), see [10, 11] and Table 1. Depending on its value at standstill \(\varOmega =0\), the rotational speed dependent unloaded tyre radius \(r_0(\varOmega )\) is then given by
Taking rotational speed dependent unloaded tyre radius and vertical tyre stiffness into account, the static tyre radius \(r_\mathrm {s}(F_z^\mathrm {S},\varOmega )\) as well as the effective tyre radius \(r_\mathrm {e}(F_z^\mathrm {S},\varOmega )\) become functions of the rotational speed too. The static tyre radius is determined by
There, the vertical deflection is approximated by the secant stiffness in the respective force-deflection operating point, i.e. \(c_z=F_z^\mathrm {S}/\mathrm {\Delta }z\). To consider the vertical load dependence, the effective tyre radius is modelled as a weighted value of the unloaded and static tyre radius by
with
The weighting factor \(\lambda (F_z^\mathrm {S})\) is determined by a linear function of the steady-state vertical force dependent on its values at the nominal \(F_z^\mathrm {N}\) and double payload \(2F_z^\mathrm {N}\), see [7]. Furthermore, the effective tyre radius is restricted and held constant when Eqs. (7)–(8) start to produce increasing values of \(r_\mathrm {e}\) at high vertical loads.
3 Tyre Testing and Measurement Results
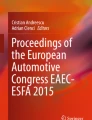
To identify the rotational speed induced effects, an extensive and detailed tyre testing series with two different high-performance tyres of sizes 245/40 R 20 99 W and 215/45 R 20 95 W was carried out. The testing series were conducted on an industrial MTS Flat-Trac® III CT tyre test rig at IABG, see [3] and Fig. 1 right. The developed measurement manoeuvres presented and described in [10, 11] have proven suitable and the results showed that they are qualified to effectively identify the influence of tyre rotation on vertical tyre force characteristics and tyre radii. Therefore, both manoeuvres were slightly modified according to the tested tyres as well as to the capabilities of the test rig and applied again. The first measurement manoeuvre is a vertical tyre load step manoeuvre, where the vertical target load \(F_z^\mathrm {tar}\) is increased and decreased stepwise to measure vertical force-delfection characteristics, see Fig. 1 top left. This manoeuvre was carried out at different constant travelling velocities \(v_{x,i}=\mathrm {const.}\) The second manoeuvre is a velocity triangle manoeuvre, where the target travelling velocity \(v_x^\mathrm {tar}\) is continuously increased and decreased, beginning from standstill \(v_x^\mathrm {min}=0\) km/h up to \(v_x^\mathrm {max}=240\) km/h, see Fig. 1 bottom left. This second manoeuvre was carried out at constant vertical tyre load \(F_{z,j}=\mathrm {const.}\) especially to investigate and validate the rotational speed induced variation of the unloaded tyre radius. The rate of travelling velocity change was set to 2 km/h per second to minimise slip or sliding effects due to wheel inertia. All measurements were performed with freely rolling tyres with constantly controlled inflation pressure. Due to restrictions caused by the test rig control, the lowest tyre load for all investigations was set to \(F_z^\mathrm {min}=200\) N. The test rig control did not work sufficiently accurate and robust enough at vertical loads below \(F_z^\mathrm {min}\).

Measurement target manoeuvres for the vertical force-deflection characteristics at \(v_{x,i}=\mathrm {const.}\) (top left) and for the tyre behaviour at \(F_{z,j}=\mathrm {const.}\) (bottom left) as well as tyre test rig and measurement setup (right)

Measured vertical force-deflection characteristics \(F_z(\mathrm {\Delta }z,\mathrm {\Delta }\dot{z})\) (left) and behaviour of effective tyre radius \(r_\mathrm {e}\) (top right) of tyre of size 245/40 R 20 99 W at different constant travelling velocities \({v_{x,i}=\{0,30,60,120,180,240\}}\) km/h as well as effective and static radius \(r_\mathrm {s}\) at a constant vertical tyre load of \({F_z^\mathrm {min}=200}\) N (bottom right)
The results of the tyre testing series of the tyre of size 245/40 R 20 99 W are presented exemplarily in Fig. 2. Measured vertical force-deflection characteristics \(F_z(\mathrm {\Delta }z,\mathrm {\Delta }\dot{z})\) at four different constant travelling velocities \(v_{x,i}=\mathrm {const.}\) are depicted in Fig. 2 left. There, all characteristics are depicted based on the vertical tyre deflection determined by the unloaded radius of the non-rotating tyre \(\mathrm {\Delta }z=r_0(0)-r_\mathrm {s}\). By inspection of these characteristics, three different rotational speed induced effects can be identified. First, the vertical force-deflection characteristic of the non-rotating tyre at \(v_{x,1}=0\) km/h shows a distinct hysteresis behaviour which is based on viscous damping and friction effects. At the rotating tyre, these effects decrease significantly and the hysteresis effects nearly vanish and can be neglected. Second, a change of the gradient occurs which is linked to an increase of tyre stiffness and third, a horizontal shift of the characteristics to negative deflection values can be observed. A tyre can only transmit pressure forces, i.e. at tyre lift-off, \(F_z(0)=0\) has to hold. Consequently, the horizontal shift of characteristics is linked to a rotational speed induced increase of the unloaded tyre radius \(r_0(\varOmega )\) which entails that the unloaded tyre radius has to be determined at every travelling velocity separately.
At the freely rolling tyre, the effective radius is determined by \(r_\mathrm {e}=v_x/\varOmega \). The behaviour of the effective tyre radius \(r_\mathrm {e}(F_z,\varOmega )\) is depicted in Fig. 2 top right. The effective radius shows a non-linear declining decrease with increasing vertical load and a progressive increase with increasing rotational speed. The rotational speed induced variation of the effective radius is nearly independent of the vertical tyre load and amounts \(\mathrm {\Delta }r_\mathrm {e}(F_z=\mathrm {const.},\varOmega )\approx 5\) mm within the tested speed range.
Due to the restrictions caused by the test rig control regarding the vertical tyre load, the behaviour of the unloaded tyre radius cannot be measured directly, only the behaviour of the static tyre radius at \(F_z^\mathrm {min}=200\) N can be investigated, see Fig. 2 bottom right. Due to the small tyre deflection at this low vertical load, the behaviour of the static tyre radius cannot directly be compared to the behaviour of the unloaded tyre radius \(r_\mathrm {s}(F_z^\mathrm {min},\varOmega )\ne r_0(\varOmega )\). However, tendencies can be identified. The static tyre radius at \(F_z^\mathrm {min}\) shows a non-linear increase which amounts up to \(\mathrm {\Delta }r_\mathrm {s}(F_z^\mathrm {min},\varOmega )\approx 4\) mm at \(v_x=240\) km/h. Furthermore, a distinct hysteresis behaviour as well as an increase of the static radius at low velocities near standstill occurs. The effective tyre radius shows a similar behaviour with a distinct increase at low velocities near standstill.

Identified vertical tangent stiffness \(c_z\) at different tyre loads \({F_{z,j}=\{2,4,6,8\}}\) kN (top left) and variation of the unloaded radius \(\mathrm {\Delta }r_0\) (bottom left) of the tyre of size 245/40 R 20 99 W as well as approximated vertical force-deflection characteristics at two different travelling velocities \({v_{x,i}=\{60,120\}}\) km/h (top and bottom right)
By application of the semi-physical vertical tyre force model of TMeasy 5, as given by Eqs. (1)–(2), and consideration of the rotational speed dependent unloaded radius, the measured vertical force-deflection characteristics can be approximated at every travelling velocity separately and the two fundamental rotational speed induced mechanisms identified, the rotational speed induced increase of vertical tyre stiffness and unloaded tyre radius, see also Sect. 4. Results of these approximations (dash-dotted) are depicted exemplarily in Fig. 3 top and bottom right at two different travelling velocities. The approximation works quite well in all cases. The resulting rotational speed dependent vertical tangent stiffness \(c_z(F_z,\varOmega )\) is depicted in Fig. 3 top left and the variation of the unloaded tyre radius \(\mathrm {\Delta }r_0(\varOmega )\) in Fig. 3 bottom left. The variation describes the rotational speed induced increase of the unloaded radius with respect to the non-rotating tyre, see Eq. (5). An interpolation of the determined values by second order polynomial functions (dashed lines) shows that the unloaded radius as well as the vertical tyre stiffness increase progressively with increasing travelling velocity. Due to the hyper-elastic tyre behaviour, the vertical stiffness increases also with increasing load. However, the vertical load effect is more distinct at low velocities. The influence of the rotational speed on the vertical tyre stiffness decreases with increasing vertical load. However, the non-linearity of this effect is distinct especially at higher tyre loads. At the lowest vertical load \(F_{z,1}=2\) kN, the increase of stiffness amounts approximately 24% with respect to its value at standstill \(v_x=0\) km/h. At the highest vertical tyre load \(F_{z,4}=8\) kN, the stiffness increases approximately 13%. The variation of the unloaded tyre radius amounts up to \(\mathrm {\Delta }r_0(\varOmega )\approx 4\) mm at \(v_x=240\) km/h.
In summary, all results of the presented experimental investigations correspond quite well to the previously identified tyre behaviour on a drum tyre test rig, see [10, 11]. The second tested tyre of size 215/45 R 20 95 W shows a similar behaviour.
4 Parameter Identification and Validation
Although the number of related model parameters increased from four to nine, the parameter identification procedure of the enhanced vertical tyre force model, as given by Eqs. (1)–(5), works straightforward according to the general identification procedure for the determination of a full parameter set of TMeasy 5 as described in [5, 10]. This procedure consists of two main working steps to identify the respective model parameters based on measured tyre behaviour. The first step is an individual curve fit to each measured tyre force characteristic and the second is a global fit according to the respective modelled tyre behaviour. The results of the first step are presented in Fig. 3. However, characteristics have to be approximated with respect to the rotational speed \(\varOmega \) instead of the travelling velocity \(v_x\). A reasonable nominal tyre payload \(F_z^\mathrm {N}\) is defined and each measured vertical force-deflection characteristic is approximated individually. Thereby, the stiffness parameters \(c_{z1,z2}(\varOmega _i)\) as well as the variation of the unloaded radius \(\mathrm {\Delta }r_0(\varOmega _i)\) at the respective rotational speed \(\varOmega _i\) are identified. After defining a reasonable nominal rotational speed \(\varOmega ^\mathrm {N}\), stiffness and unloaded radius variation are approximated by the modelled tyre behaviour described by Eqs. (3)–(4), which represents the second step. Thereby, the parameters at the nominal rotational speed and its double are determined. All approximations are based on linear or non-linear least squares methods. The parameter set of the enhanced model for the tyre of size 245/40 R 20 99 W and a nominal payload of \(F_z^\mathrm {N}=4\) kN is provided in Table 1. The defined nominal rotational speed \(\varOmega ^\mathrm {N}=47.83\) rad/s corresponds to a travelling velocity of \(v_x\approx 60\) km/h at \(F_z^\mathrm {N}\).

Comparison of measured (solid lines, markers) and simulated (dash-dotted) tyre behaviour of tyre of size 245/40 R 20 99 W at different travelling velocities \({v_{x,i}=\{0,30,120,240\}}\) km/h and tyre loads \({F_{z,j}=\{200,2000,4000,6000,8000\}}\) N
For evaluation and validation, a comparison of measured (solid lines, markers) and simulated (dash-dotted) tyre behaviour at four different travelling velocities \(v_{x,i}\) and five vertical tyre loads \(F_{z,j}\) is presented in Fig. 4. As it can be seen, the rotational speed dependent tyre behaviour is approximated quite well by the enhanced modelling approach. A rotational speed induced non-linear progressive increase of the vertical tyre stiffness \(c_z(F_z,\varOmega )\) is currently not taken into account by the enhanced model (middle left). Nevertheless, in this case, the description by linear functions leads to a reasonable approximation of the vertical force-deflection behaviour (top left). As mentioned prior, due to the restrictions caused by the test rig control, the approximated behaviour of the unloaded tyre radius \(r_0(\varOmega )\) cannot directly be compared to the measured behaviour of the static radius \(r_\mathrm {s}(F_{z,1}=200\,\mathrm {N},\varOmega )\) (bottom left). Nevertheless, tendencies can be compared. As the comparison shows, the unloaded radius of the non-rotating tyre \(r_0(0)\), which was identified based on the approximation of vertical force-deflection characteristics, seems to be too small. Due to the restrictions, a precise determination is not possible. However, for a reasonable evaluation, a detailed analysis of the distinct hysteresis behaviour of the static radius in this operating condition is also required. The rotational speed induced increase of the static \(r_\mathrm {s}(F_z,\varOmega )\) and effective tyre radius \(r_\mathrm {e}(F_z,\varOmega )\) is mainly driven by the progressive increase of the unloaded radius, because at zero vertical force \(r_\mathrm {s}(0,\varOmega )=r_\mathrm {e}(0,\varOmega )=r_0(\varOmega )\) holds (top right). However, in more detail, the variation of the static tyre radius \(\mathrm {\Delta }r_\mathrm {s}(F_z,\varOmega )\) shows that the effect of the rotational speed on the static radius increases with increasing tyre load due to stiffness variations (bottom right). Within the investigated speed range, the influence of the rotational speed on the effective tyre radius is significant as well as the effect of the vertical load (middle right). Furthermore, at the lowest vertical load \(F_{z,1}=200\) N a distinct increase of the measured effective tyre radius occurs (top right), cf. also Fig. 2 top and bottom right. Such a behaviour is currently neglected in the modelling approach and will be investigated in more detail in the ongoing studies. A sufficiently accurate determination of the behaviour of a tyre and especially of the effective tyre radius at low vertical loads near tyre lift-off as well as at low rotational speeds near standstill is a sophisticated and challenging task. Knowledge on the behaviour of a tyre under such specific operating conditions is limited and should be further investigated.
5 Summary and Conclusion
The present study represents a continuation of previous works on the influences of tyre rotation on tyre characteristics, as they have so far hardly been considered in conventional empirical and semi-physical tyre modelling approaches for vehicle handling dynamics analysis. Increased accuracy demands for the consideration of the kinematics of a rolling tyre do not longer allow this influence to be neglected. As an extension to previously published investigations conducted on a drum tyre test rig, previous findings are validated by means of tyre testing on a flat track tyre test rig.
The enhanced semi-physical modelling approaches for rotational speed dependent vertical tyre force transmisson and tyre radii are described. In order to identify the rotational speed induced effects, an extensive and detailed tyre testing series with two different high-performance tyres of sizes 245/40 R 20 99 W and 215/45 R 20 95 W was conducted on an industrial MTS Flat-Trac® III CT tyre test rig. The presented results show that within the investigated speed range between 0 and 240 km/h, the vertical tyre stiffness as well as the unloaded tyre radius increase in a non-linear progressive manner with increasing rotational speed due to centrifugal effects. All experimental results correspond quite well to the previous findings.
Furthermore, the practical applicability of the proposed semi-physical modelling approaches is discussed and demonstrated. All models and procedures described combine computational effectiveness with sufficient accuracy from the engineering point of view. It is shown that for the identification of the introduced additional model parameters, only measurements of vertical force-deflection characteristics at different speeds are required. Even if no measurement is available, an educated estimate is possible due to the physical meaning of the parameters. As the validations show, based on the proposed enhanced semi-physical models of vertical tyre force transmission and tyre radii, insight into fundamental effects can effectively be obtained. Variation of tyre stiffness and unloaded radius represent the two fundamental rotational speed induced effects. A rotational speed dependent progressive increase of the static and effective tyre radius is mainly driven by the progressive variation of the unloaded tyre radius. Additionally, the results show the importance of an accurate determination of the unloaded tyre radius and its rotational speed induced variation which is significant. The correct value of the unloaded radius has to be determined at every rotational speed of interest.
In conclusion, as the validations show, the rotational speed dependent tyre behaviour can be approximated quite well by the proposed semi-physical modelling approach with sufficient accuracy. Additionally, former findings based on investigations carried out on a drum tyre test rig are confirmed.
References
Clark, S.K. (ed.): Mechanics of Pneumatic Tires. U.S. Department of Transportation, Washington D.C., United States (1981)
Enisz, K., Fodor, D., Szalay, I., Kovacs, L.: Reconfigurable real-time hardware-in-the-loop environment for automotive electronic control unit testing and verification. IEEE Instrum. Meas. Mag. 17(4), 31–36 (2014). https://doi.org/10.1109/MIM.2014.6873729
Industrieanlagen-Betriebsgesellschaft mbH (IABG). https://www.iabg.de. Accessed 24 June 2021
Rajendran, S., Spurgeon, S.K., Tsampardoukas, G., Hampson, R.: Estimation of road frictional force and wheel slip for effective antilock braking system (ABS) control. Int. J. Robust Nonlinear Control 29, 736–765 (2018). https://doi.org/10.1002/rnc.4366
Rill, G.: TMeasy Extended Documentation, Version 5.0.1. Technical report, Georg Rill, Regensburg, Germany (2015)
Rill, G.: TMEASY 6.0–a handling tire model that incorporates the first two belt eigenmodes. In: Proceedings of the XI International Conference on Structural Dynamics (EURODYN 2020), vol. 1, pp. 676–689. National Technical University of Athens, Athens, Greece (2020). ISBN 978-618-85072-0-3
Rill, G., Castro, A.A.: Road Vehicle Dynamics, Fundamentals and Modeling with MATLAB. CRC Press/Taylor & Francis Group, Boca Raton, United States (2020). ISBN 978-0-367-19973-9
Sabatini, S., Formentini, S., Panzani, G., Santos, J.D.L., Savaresi, S.M.: Motorcycle tire rolling radius estimation for TPMS applications via GPS sensing. In: 2017 IEEE Conference on Control Technology and Applications (CCTA), pp. 1892–1897 (2017). https://doi.org/10.1109/CCTA.2017.8062732
Sbrosi, M.: Experimental analysis of dynamic rolling radius of tyres at high speed. In: Electrification & All-Wheel Drive Congress (EAWD 2019). Graz, Austria (2019)
Schabauer, M.: The influence of tyre rotation on the vertical tyre force transmission and tyre kinematics. Master’s thesis, Graz University of Technology, Graz, Austria (2020). (publication scheduled for 2021)
Schabauer, M., Hackl, A., Hirschberg, W., Lex, C.: Experimental investigation and semi-physical modelling of the influence of rotational speed on the vertical tyre stiffness and tyre radii. In: Klomp, M., Bruzelius, F., Nielsen, J., Hillemyr, A. (eds.) IAVSD 2019. LNME, pp. 1889–1898. Springer, Cham (2020). https://doi.org/10.1007/978-3-030-38077-9_214
Zegelaar, P.W.A.: The dynamic response of tyres to brake torque variations and road unevennesses. Doctoral thesis, Delft University of Technology, Delft, Netherlands (1998). ISBN 90-370-0166-1
Acknowledgement
The authors would like to thank Prof. Georg Rill, professor emeritus at OTH Regensburg, for his generous support over many years regarding the TMeasy tyre model. Furthermore, the authors would also like to thank thyssenkrupp Presta AG, especially Kristof Polmans and his team, for their generous support regarding the tyre testing series.
Author information
Authors and Affiliations
Corresponding author
Editor information
Editors and Affiliations
Rights and permissions
Open Access This chapter is licensed under the terms of the Creative Commons Attribution 4.0 International License (http://creativecommons.org/licenses/by/4.0/), which permits use, sharing, adaptation, distribution and reproduction in any medium or format, as long as you give appropriate credit to the original author(s) and the source, provide a link to the Creative Commons license and indicate if changes were made.
The images or other third party material in this chapter are included in the chapter's Creative Commons license, unless indicated otherwise in a credit line to the material. If material is not included in the chapter's Creative Commons license and your intended use is not permitted by statutory regulation or exceeds the permitted use, you will need to obtain permission directly from the copyright holder.
Copyright information
© 2022 The Author(s)
About this paper

Cite this paper
Schabauer, M., Hackl, A., Scherndl, C., Hirschberg, W., Lex, C. (2022). Experimental Validation of a Semi-physical Modelling Approach of the Influence of Tyre Rotation on the Vertical Tyre Force Transmission and Tyre Kinematics. In: Orlova, A., Cole, D. (eds) Advances in Dynamics of Vehicles on Roads and Tracks II. IAVSD 2021. Lecture Notes in Mechanical Engineering. Springer, Cham. https://doi.org/10.1007/978-3-031-07305-2_88
Download citation
DOI: https://doi.org/10.1007/978-3-031-07305-2_88
Published:
Publisher Name: Springer, Cham
Print ISBN: 978-3-031-07304-5
Online ISBN: 978-3-031-07305-2
eBook Packages: EngineeringEngineering (R0)