
Abstract
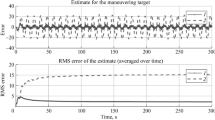
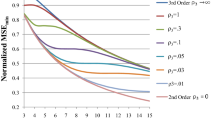
Radar systems are used for estimating the position and velocity of aircraft and ships from range and bearing measurements. In this article, we consider two motion models for a civilian aircraft: a constant velocity model and a coordinated turn model. Both kinematics models are written in state-space terms, where the velocity perturbations are modeled by a white noise acceleration model. In order to estimate the aircraft states given noisy measurements obtained from sensor outputs, we follow a Bayesian statistical approach that calculates the estimators of the unknown states. In our simulation, we recreate an air traffic control scenario and implement two nonlinear filtering algorithms in order to perform target tracking of the aircraft. The nonlinear Bayesian-based filters for this target tracking problem are the unscented Kalman filter and the Gauss-Hermite Kalman filter. Finally, the performance of both nonlinear filters is evaluated with a performance metric, root mean squared error, in Monte-Carlo runs.
Access this chapter
Tax calculation will be finalised at checkout
Purchases are for personal use only
Similar content being viewed by others

References
Bar-Shalom Y, Li XR, Kirubarajan T (2004) Estimation with applications to tracking and navigation: theory algorithms and software. Wiley, Hoboken
Särkkä S (2013) Bayesian filtering and smoothing, vol 3. Cambridge University Press, Cambridge
Arasaratnam I, Haykin S (2009) Cubature Kalman filters. IEEE Trans Autom Control 54(6):1254–1269
Afshari HH, Gadsden SA, Habibi S (2017) Gaussian filters for parameter and state estimation: a general review of theory and recent trends. Sig Process 135:218–238
Julier SJ, Uhlmann JK (2004) Unscented filtering and nonlinear estimation. Proc IEEE 92(3):401–422
Wan EA, Van Der Merwe R, Haykin S (2001) The unscented Kalman filter. Kalman Filter Neural Netw 5(2007):221–280
Sánchez L, Infante S, Griffin V, Rey D (2016) Spatio-temporal dynamic model and parallelized ensemble Kalman filter for precipitation data. Braz J Probab Stat 30:653–675
Soto J, Infante S (2019) Ensemble Kalman filter and extended Kalman filter for state-parameter dual estimation in mixed effects models defined by a stochastic differential equation. In: International conference on ‘knowledge society: technology, sustainability and educational innovation’. Springer, pp 285–300
Arasaratnam I, Haykin S, Elliott RJ (2007) Discrete-time nonlinear filtering algorithms using Gauss-Hermite quadrature. Proc IEEE 95(5):953–977
Ito K, Xiong K (2000) Gaussian filters for nonlinear filtering problems. IEEE Trans Autom Control 45(5):910–927
Infante S, Sanchez L, Hernandez A (2020) Stochastic models to estimate population dynamics. Stat Optimiz Inf Comput 8(1):136–152
Barragán G (2020) State and parameter estimation in stochastic dynamical system. Bachelor’s thesis. Escuela de Ciencias Matemáticas y Computacionales, Universidad de Investigación de Tecnología Experimental Yachay, Urcuquí, Ecuador. https://repositorio.yachaytech.edu.ec/bitstream/123456789/137/1/ECMC0020.pdf
Author information
Authors and Affiliations
Corresponding author
Editor information
Editors and Affiliations
Rights and permissions
Copyright information
© 2021 The Author(s), under exclusive license to Springer Nature Switzerland AG
About this paper

Cite this paper
Barragán, G., Infante, S., Hernández, A. (2021). Unscented Kalman Filter and Gauss-Hermite Kalman Filter for Range-Bearing Target Tracking. In: Iano, Y., Saotome, O., Kemper, G., Mendes de Seixas, A.C., Gomes de Oliveira, G. (eds) Proceedings of the 6th Brazilian Technology Symposium (BTSym’20). BTSym 2020. Smart Innovation, Systems and Technologies, vol 233. Springer, Cham. https://doi.org/10.1007/978-3-030-75680-2_59
Download citation
DOI: https://doi.org/10.1007/978-3-030-75680-2_59
Published:
Publisher Name: Springer, Cham
Print ISBN: 978-3-030-75679-6
Online ISBN: 978-3-030-75680-2
eBook Packages: EngineeringEngineering (R0)