
Abstract
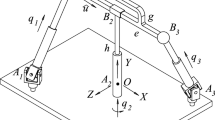
The geometry of a 3D octahedral parallel robot manipulator system is specified in terms of two rigid octahedral structures (the fixed and moving platforms) and six actuation legs. The symmetry of the system is exploited to determine the behaviour of (a new version of) the quality index for various motions. The main results are presented graphically.
Access this chapter
Tax calculation will be finalised at checkout
Purchases are for personal use only
Preview
Unable to display preview. Download preview PDF.
Similar content being viewed by others

References
Angeles, J., Lopez-Cajun, C. S. (1992), Kinematic isotropy and the conditioning index of serial robotic manipulators, The International Journal of Robotics Research, no. 6, vol. 11, pp. 560–571.
Duffy, J., Rooney, J., Knight, B. and Crane, C. D. (2000), A review of a family of self-deploying tensegrity structures with elastic ties, The Shock and Vibration Digest, no. 2, vol. 32, pp. 100–106.
Lee, J., Duffy, J. and Hunt, K.H. (1998), A practical quality index on the octahedral manipulator, The International Journal of Robotics Research, no. 10, vol. 17, pp. 1081–1090.
Lee, J. Duffy, J. and Keler, M. (1999), The optimum quality index for the stability of in-parallel planar platform devices, Journal of Mechanical Design, vol. 121, pp. 15–20.
Lee, J., Duffy, J. and Rooney, J. (2000), An initial investigation into the geometrical meaning of the (pseudo-) inverses of the line matrices of the edges of platonic polyhedra, Proceedings of a Symposium Commemorating the Legacy, Works, and Life of Sir Robert Stawel Ball Upon the 100th Anniversary of A Treatise on the Theory of Screws, Trinity College, University of Cambridge, UK., July 9–12.
Mayer St-Onge, B. and Gosselin, C. M. (2000), Singularity analysis and representation of the general Gough-Steward platform, The International Journal of Robotics Research, no. 3, vol. 19, pp. 271–288.
Merlet, J-P. (1993), Direct kinematics of parallel manipulators, IEEE Transaction on Robotics and Automation, no. 6, vol. 9, pp. 842–846.
Rooney, J., Duffy, J. and Lee, J. (1999), Tensegrity and compegrity configurations in anti-prism manipulator platforms, Proceedings of the Tenth World Congress on the Theory of Machines and Mechanisms, Oulu, Finland, pp. 1278–1287.
Stewart, D. (1965), A platform with six degrees of freedom, Proceedings of Institution of Mechanical Engineers, London, UK, no. 15, vol. 180, pp. 371–386.
Yoshikawa, T. (1985), Manipulability of robotic mechanism, The International Journal of Robotics Research, no. 2, vol. 4, pp. 3–9.
Zanganeh, K.E. and Angeles, J. (1997), Kinematic isotropy and optimum design of parallel manipulators, The International Journal of Robotics Research, no. 2, vol. 16, pp. 185–197.
Author information
Authors and Affiliations
Editor information
Editors and Affiliations
Rights and permissions
Copyright information
© 2002 Springer Science+Business Media Dordrecht
About this chapter
Cite this chapter
Tanev, T.K., Rooney, J. (2002). Rotation Symmetry Axes and the Quality Index in a 3D Octahedral Parallel Robot Manipulator System. In: Lenarčič, J., Thomas, F. (eds) Advances in Robot Kinematics. Springer, Dordrecht. https://doi.org/10.1007/978-94-017-0657-5_4
Download citation
DOI: https://doi.org/10.1007/978-94-017-0657-5_4
Publisher Name: Springer, Dordrecht
Print ISBN: 978-90-481-6054-9
Online ISBN: 978-94-017-0657-5
eBook Packages: Springer Book Archive