
Abstract
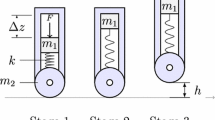
A passive vertical hopping robot is here highly idealised as two vertically arranged masses acted on by gravity and coupled by a linear spring. The lower mass makes dead (e = 0) collisions with the rigid ground. The equations of motion can be reduced to a one dimensional map. Fixed points of the map are found in which case the robot hops incessantly. For these conservative solutions the lower mass collides with the ground with zero impact velocity. The interval of attraction for these conservative fixed points depends on system parameters
Access this chapter
Tax calculation will be finalised at checkout
Purchases are for personal use only
Preview
Unable to display preview. Download preview PDF.
Similar content being viewed by others


Reference
Raibert, M.H. (1986) Legged Robots that Balance. The MIT Press, Cambridge, Massuchussets.
M’Closkey, R.T., Burdick, J.W. (1993) Periodic motions of a hopping with vertical and forward motion, International Journal of Robotic Research 12(6):197–218.
Vakakis, A.F., Burdick, J.W. (1991) An “interesting” strange attractor in the dynamics of a hopping robot, International Journal of Robotic Research 10(6):606–618.
Alexander, R.M. (1991) Energy-saving mechanisms in walking and running, J. Exp. Biol 160:55–69.
Garcia, M., Ruina, A., Chatterjee, A. (1997) Speed, efficiency and stability of small slope 2D passive-dynamic bipedal walking, International Conference on Robotics and Automation.
Garcia, M., Ruina, A., Chatterjee, A. (1998) Passive dynamic walking: Small slope implies low speed. (to be published).
McGeer, T. (1990) Passive dynamic walking, International Journal of Robotic Research 9:62–82.
Thomson, J.M.T., Ghaffari, R. (1982) Chaos after period doubling bifurcations in the resonance of an impact oscillator, Physics Letters 91A:5–8.
Senator, M. (1970) Existence and stability of periodic motions of a harmonically forced impacting oscillator, Journal of the Acoustical Society of America 47:1390–1397.
Schiehlen, W., Gao, J. (1989) Simulation des stobfreien hüpfens, ZAMM 69:303–305.
Devaney, R. (1987) An Introduction to Chaotic Dynamical Systems. New York, Addison-Wesley.
Pratap, R., Ruina, A. (1998) Introduction to Dynamics. Oxford University Press(under publication).
Author information
Authors and Affiliations
Editor information
Editors and Affiliations
Rights and permissions
Copyright information
© 2001 Springer Science+Business Media Dordrecht
About this paper
Cite this paper
Reddy, C.K., Pratap, R. (2001). A Passive Hopper With Lossless Collisions. In: Narayanan, S., Iyengar, R.N. (eds) IUTAM Symposium on Nonlinearity and Stochastic Structural Dynamics. Solid Mechanics and its Applications, vol 85. Springer, Dordrecht. https://doi.org/10.1007/978-94-010-0886-0_17
Download citation
DOI: https://doi.org/10.1007/978-94-010-0886-0_17
Publisher Name: Springer, Dordrecht
Print ISBN: 978-94-010-3808-9
Online ISBN: 978-94-010-0886-0
eBook Packages: Springer Book Archive