
Abstract
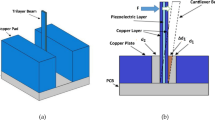
In human hand skin, there are four kinds of mechanoreceptors with different sensing mechanisms to detect both gentle touch and high pressure. In this study, an integrated bio-inspired tactile sensor array, which consists of a capacitive layer and a pressure-sensitive-rubber (PSR) based layer, is designed for prosthesis application. The capacitive layer can detect the low-pressure, while the PSR-based layer is designed to detect the high-pressure. The capacitive layer and PSR-based layer are integrated together with space resolution of 2 mm and 1 mm, respectively. For the designed sensor array, the finite element analysis (FEA) is conducted to study the effects of the dimensions of polyimide in capacitive layer and the Young’s modulus of the conductive rubber in PSR-based layer on the sensing performance. The simulation results show that the developed bio-tactile sensor array is highly sensitive in both low and high pressure range.
Access this chapter
Tax calculation will be finalised at checkout
Purchases are for personal use only
Preview
Unable to display preview. Download preview PDF.
Similar content being viewed by others


References
Noda, K., Hoshino, K., Matsumoto, K., Shimoyama, I.: A shear stress sensor for tactile sensing with the piezoresistive cantilever standing in elastic material. Sens. Actuators A: Phys. 127, 295–301 (2006)
Yu, S., Chang, D., Tsao, L., Shih, W., Chang, P.: Porous nylon with electro-active dopants as flexible sensors and actuators. In: Proceedings of the IEEE 21st International Conference on Micro Electro Mechanical Systems (MEMS), Tucson, AZ, USA, pp. 908–911 (2008)
Kawaguchi, H., Someya, T., Sekitani, T., Sakurai, T.: Cut-and-paste customization of organic FET integrated circuit and its application to electronic artificial skin. IEEE J. Solid-State Circ. 40(1), 177–185 (2005)
Lee, H., Chung, J., Chang, S., Yoon, E.: Normal and shear force measurement using a flexible polymer tactile sensor with embedded multiple capacitors. J. Microelectromech. Syst. 17, 934–942 (2008)
Hosoda, K., Tada, Y., Asada, M.: Anthropomorphic robotic soft fingertip with randomly distributed receptors. Robotics and Autonomous Systems 54, 104–109 (2006)
Dahiya, R.S., Valle, M., Metta, G., Lorenzelli, L.: Bio-inspired tactile sensing arrays. In: Proceedings of Bioengineered and Bioinspired Systems IV, Dresden, Germany, SPIE, 73650D-9 (2009)
Mannsfeld, S.C.B., Tee, B.C., Stoltenberg, R.M., Chen, C.V.H., Barman, S., Muir, B.V.O., Sokolov, A.N., Reese, C., Bao, Z.: Highly sensitive flexible pressure sensors with microstructured rubber dielectric layers. Nat. Mater., 859–864 (2010)
Hoshino, K., Mori, D.: Three-dimensional tactile sensor with thin and soft elastic body. In: Proceedings of the IEEE Workshop on Advanced Robotics and Its Social Impacts, ARSO 2008, pp. 1–6 (2008)
Dargahi, J., Najarian, S.: Human tactile perception as a standard for artificial tactile sensing-a review. Int. J. Medical Robotics and Computer Assisted Surgery 1(1), 23–35 (2004)
Xia, Y., Whitesides, G.M.: Soft Lithography. Annu. Rev. Mater. Sci. 28, 153–184 (1998)
Bin, W.: Fabrication and Adhesion Study of Biomimetic Viscous Material. Nanjing University of Aeronautics and Astronautics, China (2010)
Dellon, E.S., Mourey, R., Dellon, A.L.: Human pressure perception values for constant and moving one- and two-point discrimination. J. Plast. Reconstr. Surg. 90, 112–117 (1992)
Author information
Authors and Affiliations
Editor information
Editors and Affiliations
Rights and permissions
Copyright information
© 2012 Springer-Verlag Berlin Heidelberg
About this paper
Cite this paper
Liang, G., Mei, D., Wang, Y., Dai, Y., Chen, Z. (2012). Design and Simulation of Bio-inspired Flexible Tactile Sensor for Prosthesis. In: Su, CY., Rakheja, S., Liu, H. (eds) Intelligent Robotics and Applications. ICIRA 2012. Lecture Notes in Computer Science(), vol 7508. Springer, Berlin, Heidelberg. https://doi.org/10.1007/978-3-642-33503-7_4
Download citation
DOI: https://doi.org/10.1007/978-3-642-33503-7_4
Publisher Name: Springer, Berlin, Heidelberg
Print ISBN: 978-3-642-33502-0
Online ISBN: 978-3-642-33503-7
eBook Packages: Computer ScienceComputer Science (R0)