
Abstract
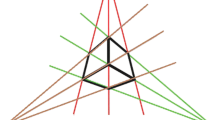
In this article, a new method for camera self-calibration is presented. A correspondent matrix can be built by matching the corresponding vanishing points between two images and the proposed method must use at least two of these matrices for calibration. The images are all taken from different orientations in any locations for the same object in space. The vanishing points in the image are the projective points of the infinity points in space. So in the calibration, it has no constraints about the location and the orientation of the camera and the calibration procedure is easy. Since when the internal parameters of camera are changed during the task, the camera can be easily and effectively calibrated if the vanishing points can be conveniently gotten from the task images or the camera can insert three or more images about the same object during the ongoing task. Compared with the traditional methods of camera self-calibration, this method is an easier and more effective calibration method and also it is an online calibration with accurate results.
Supported by NSFC project (grant no 60872099).
Access this chapter
Tax calculation will be finalised at checkout
Purchases are for personal use only
Preview
Unable to display preview. Download preview PDF.
Similar content being viewed by others


References
Maybank, S.J., Faugeras, O.D.: A theory of self-calibration of a moving camera. International Journal of Computer Vision 8(2), 123–151 (1992)
Faugeras, O.D., Luong, Q.-T., Maybank, S.J.: Camera Self-calibration: Theory and experiments. In: Sandini, G. (ed.) ECCV 1992. LNCS, vol. 588, pp. 321–334. Springer, Heidelberg (1992)
Zhang, Z.: A flexible new technique for camera calibration. IEEE Transactions on Pattern Analysis and Machine Intelligence 22, 1330–1334 (2002)
Dron, L.: Dynamic camera self-calibration from controlled motion sequences. In: Proc. IEEE Conf. on Computer Vision and Pattern Recognition, pp. 501–506 (1993)
Basu, A.: Active calibration: Alternative strategy and analysis. In: Proc. IEEE Conf. on Computer Vision and Pattern Recognition, pp. 495–500 (1993)
Du, F., Brady, M.: Self-calibration of the intrinsic parameters of cameras for active vision systems. In: Proc. IEEE Conf. on Computer Vision and Pattern Recognition, pp. 477–482 (1992)
Hartley, R.I.: Self-calibration of stationary cameras. International Journal of Computer Vision 22, 5–23 (1997)
Hartley, R.I.: Self-calibration from multiple views with a rotation camera. In: Proc. of the 3rd, European Conference on Computer Vision, vol. I, pp. 471–478 (1994)
Caprile, B., Torre, V.: Using Vanishing Points for Camera Calibration. International Journal of Computer Vision 4(2), V127–V140 (1990)
Bouguet, J.Y.: Complete camera calibration toolbox for matlab [EB/OL], (2002), Retrieved from the World Wide Web http://www.vision.caltech.edu/bouguetj/calibdoc/index.html
Author information
Authors and Affiliations
Editor information
Editors and Affiliations
Rights and permissions
Copyright information
© 2011 Springer-Verlag Berlin Heidelberg
About this paper
Cite this paper
Chang, D., Wang, K., Wang, L. (2011). Camera Self-calibration Based on the Vanishing Points. In: Deng, H., Miao, D., Lei, J., Wang, F.L. (eds) Artificial Intelligence and Computational Intelligence. AICI 2011. Lecture Notes in Computer Science(), vol 7004. Springer, Berlin, Heidelberg. https://doi.org/10.1007/978-3-642-23896-3_6
Download citation
DOI: https://doi.org/10.1007/978-3-642-23896-3_6
Publisher Name: Springer, Berlin, Heidelberg
Print ISBN: 978-3-642-23895-6
Online ISBN: 978-3-642-23896-3
eBook Packages: Computer ScienceComputer Science (R0)