
Abstract
We study the convergence properties of a difference scheme for singularly perturbed Volterra integro-differential equations on a graded mesh. We show that the scheme is first-order convergent in the discrete maximum norm, independently of the perturbation parameter. Numerical experiments are presented, which are in agreement with the theoretical results.
MSC:45J05, 65R20, 65L11.
Similar content being viewed by others

1 Introduction
Singularly perturbed Volterra integro-differential equations arise in many physical and biological problems. Among these are diffusion-dissipation processes, epidemic dynamics, synchronous control systems, and filament stretching problems (see, e.g., [1–4]). For extensive reviews, see [1, 3–8].
Singularly perturbed differential equations are typically characterized by a small parameter ε multiplying some or all of the highest-order terms in the differential equations. The difficulties arising in the numerical solutions of singularly perturbed problems are well known. A comprehensive review of the literature on numerical methods for singularly perturbed differential equations may be found in [8–12].
This paper is concerned with the following singularly perturbed Volterra integro-differential equation:
where is the perturbation parameter, () and () are sufficiently smooth functions, A is a given constant and . By substituting in (1.1), we obtain the reduced equation
which is a Volterra integral equation of the second kind. The singularly perturbed nature of (1.1) occurs when the properties of the solution with are incompatible with those when . The interest here is in those problems which do imply such an incompatibility in the behavior of u in a neighborhood of . This suggests the existence of an initial layer near the origin where the solution undergoes a rapid transition.
A special class of singularly perturbed integro-differential-algebraic equations and singularly perturbed integro-differential systems has been solved by Kauthen [13, 14] by implicit Runge-Kutta methods. A survey of the existing literature on a singularly perturbed Volterra integral and integro-differential equations is given by Kauthen [15]. The exponential scheme that has a fourth-order accuracy when the perturbation parameter ε is fixed is derived and a stability analysis of this scheme is discussed in [16]. The numerical discretization of singularly perturbed Volterra integro-differential equations and Volterra integral equations by tension spline collocation methods in certain tension spline spaces are considered in [17]. For the numerical solution of singularly perturbed Volterra integro-differential equations, we have studied the following articles: [18–21].
Our goal is to construct an ε-numerical method for solving (1.1)-(1.2), by which we mean a numerical method which generates ε-uniformly convergent numerical approximations to the solution. For this, we use a finite difference scheme on an appropriate graded mesh which are dense in the initial layer. Graded meshes are dependent on ε and mesh points have to be condensed in a neighborhood of in order to resolve the initial layer. In graded meshes, basically half of the mesh points are concentrated in a neighborhood of the point and the remaining half forms a uniform mesh on the rest of (see [10, 11, 22]).
In [23], the authors gave a uniformly convergent numerical method with respect to ε on a uniform mesh for the numerical solution of a linear singularly perturbed Volterra integro-differential equation. However, in this study, we will derive a uniformly convergent ε-numerical method on a graded mesh for the numerical solution of a nonlinear singularly perturbed Volterra integro-differential equation. This is the aspect of the problem of this paper that is different from [23] and the others.
The outline of the paper is as follows: In Section 2, the properties of the problem (1.1), (1.2) are given. In Section 3, the difference scheme constructed on the non-uniform mesh for the numerical solution (1.1), (1.2) is presented and graded mesh is introduced. Stability and convergence of the difference scheme are investigated in Section 4 and error of the difference scheme is evaluated in Section 5. Finally numerical results are presented in Section 6.
Let us now introduce some notation. Let
be the non-uniform mesh on . For each we set the step size .
Here and throughout the paper we use the notation
, for any continuous function .
In our estimates, we use the maximum norm given by
For any discrete function , we also define the corresponding discrete norm by
Throughout the paper, C will denote a generic positive constant that is independent of ε and the mesh parameter.
2 The continuous problem
In this section, we study the behavior of the solution of (1.1)-(1.2) and its first derivative which are required for the analysis of the remainder term in the next sections when the error of the difference scheme is analyzed.
Lemma 2.1 Suppose that and have continuous partial derivatives with respect to u, respectively, on and and have uniformly bounded first partial derivatives in ε. Then the solution of problem (1.1)-(1.2) satisfies the inequalities
Proof The analysis of the convergence properties of numerical method that will be obtained and the study of the behavior of the solution of (1.1)-(1.2) with its first derivative will necessarily involve the linearization of the given problem using the mean value theorem for several variables (see [24]). Hence, we obtain
where
and
We show the validity of (2.1). For the solution of the problem (2.3), we have
and from this we can write
If , then it follows that
Then, applying the Gronwall inequality to the last estimate, we obtain
which proves (2.1).
To prove (2.2), differentiating equation (1.1) we have
where
and
By using (1.1), we can obtain
It follows from (2.4) that
Obviously, if and has continuous partial derivatives in u, respectively, on and , then
Hence, we can conclude that (2.2) is a direct consequence of (2.5), (2.6). □
3 Discretization and mesh
To obtain an approximation for (1.1), we integrate (1.1) over :
Using the quadrature rules in [25], we have
where
and
Applying also (2.1) in [25] for to the integral in (3.2), we obtain
where
It is clear from (3.1) and (3.2) that
where the remainder term is
Neglecting in (3.3), we may suggest the following difference scheme for approximating (1.1), (1.2):
For the difference scheme (3.7), (3.8) to be ε-uniform convergent, we will use a mesh that is graded inside the initial layer region. For an even number N, the graded mesh takes points in the interval and also points in the interval , where the transition point τ, which separates the fine and coarse portions of the mesh, is obtained by taking
In practice one usually has , so the mesh is fine on and coarse on . We shall consider a mesh which is equidistant in but graded in by a logarithmic mesh generating function (see [26, 27]). The corresponding mesh points are as follows:
and
where .
We only consider the graded mesh defined by (3.9)-(3.11) in the remainder of the paper.
4 Stability and convergence of the difference scheme
Lemma 4.1 Let the difference operator
be given, where and . Then we have the following:
-
(i)
For the difference operator (4.1), the discrete maximum principle holds: If , and , then , .
-
(ii)
If , then the solution of the difference initial value problem
satisfies the estimate
-
(iii)
If is nondecreasing and , then
(4.3)
Proof See [23]. □
Lemma 4.2 Under condition
for the difference operator
we have
Proof Difference expression (4.5) can be rewritten as
where
It is easy to see that
and
Since
by (4.3), (4.6) follows in view of (4.2). □
Now we will show stability for the difference problem (3.7)-(3.8).
Lemma 4.3 Let the difference operator be defined by (4.5). Then for the difference problem (3.7)-(3.8) we have
Proof From (3.7) we have
If we take into consideration that the kernel is bounded, it can be concluded that the estimate (4.7) holds. □
Lemma 4.4 We assume that the condition (4.4) holds. Then for the solution of difference scheme (3.7)-(3.8), we have
Proof Let
where
Thus, from the inequality (4.7), we have the following difference inequality:
Using the discrete maximum principle, we have
where is the solution of the problem
In view of (4.2), it follows that
and
Then application of the difference analog of the differential inequality gives
which together with (4.9) proves (4.8). □
5 Uniform error estimates
To investigate the convergence of the method, note that the error function , , is the solution of the discrete problem
where is given by (3.6) and
Lemma 5.1 Under the condition of Lemma 2.1, for the remainder term of the scheme (3.7)-(3.8), the estimate
holds.
Proof The remainder term of the scheme (3.7) can be rewritten as
where
and
In view of Lemma 2.1, for an arbitrary mesh, it follows from (5.4), (5.5), and (5.6) that
respectively, where
First, we consider the and estimate on and separately. Then . In the layer region , we get
by (2.2). Since
and
it follows from (5.10) that
It follows from (5.8) and (5.9) that
and
respectively. From (5.11), (5.12), and (5.13) for the region we get
In the layer region , (or ) by (2.2), and
In view of the above discussion, we get
Similarly, it is clear that
and
Combining the estimates (5.11), (5.12), and (5.13) for the region , we get
Now we consider the case . In this case, . Therefore, for with (3.10), we can obtain similar results to that obtained above. For , since ,
It follows from (5.7), (5.8), and (5.9) that
respectively. When we combine the estimates (5.19), (5.20), and (5.21), we get
From (5.14), (5.18), and (5.22), it is easy to see that (5.3) holds. □
Lemma 5.2 Under condition (4.4) and Lemma 5.1, the solution of problem (5.1)-(5.2) satisfies
Proof Using intermediate value theorem for the problem (3.7)-(3.8), we get
where
If we apply Lemma 4.4 to (5.24)-(5.25), then we see the validity of the inequality (5.23). □
Combining the two previous lemmas gives us the following main result.
Theorem 5.3 Suppose that the conditions of Lemma 5.1 and (4.4) are satisfied and u is the solution of problem (1.1), (1.2). Then the following ε-uniform convergence result holds for the solution U of the difference problem (3.7), (3.8) on the mesh (3.9)-(3.11):
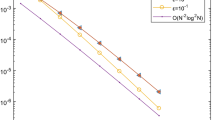
6 Numerical results
In this section, we test the performance of the difference problem (3.7), (3.8). It is clear that the difference problem (3.7), (3.8) is a nonlinear problem. When we solve such problems, nonlinear equations arise in each step. There are several methods for solving these kinds of nonlinear equations. One of these methods is quasi-linearization. Quasi-linearization is a method like Newton’s method (see, e.g., [28]). This method amounts to linearizing the nonlinear terms in the nonlinear problems. A quasi-linearization procedure defines a sequence of linear problems whose solutions converge to that of the given nonlinear problems. For convergence of this method, one can refer to [28, 29]. If we use this method for the difference problem (3.7), (3.8), we obtain
Here, we obtain the following iteration process:
where
and is given.
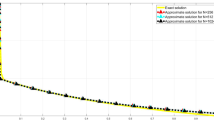
We apply the difference scheme (3.7), (3.8) to the following Volterra integro-differential equation:
with . The exact solution of the equation is . Some computational results are presented in Table 1. We also calculate the experimental rate of uniform convergence p as follows:
where
The obtained results show that the convergence rate of the difference scheme (3.7), (3.8) is essentially in accord with the theoretical analysis.
7 Conclusion
A nonlinear Volterra integro-differential equation was considered. We solved this equation by using a finite difference scheme on an appropriate graded mesh which is dense in the initial layer. We showed that the method shows uniform convergence with respect to the perturbation parameter for the numerical approximation of the solution. Numerical results which support the theoretical results were presented.
References
Angell JS, Olmstead WE: Singularly perturbed Volterra integral equations II. SIAM J. Appl. Math. 1987, 47: 1–14. 10.1137/0147001
Hoppensteadt FC: An algorithm for approximate solutions to weakly filtered synchronous control systems and nonlinear renewal processes. SIAM J. Appl. Math. 1983, 43: 834–843. 10.1137/0143054
Jordan GS: A nonlinear singularly perturbed Volterra integrodifferential equation of nonconvolution type. Proc. R. Soc. Edinb., Sect. A 1978, 80: 235–247. 10.1017/S030821050001026X
Lodge AS, McLeod JB, Nohel JA: A nonlinear singularly perturbed Volterra integrodifferential equation occurring in polymer rheology. Proc. R. Soc. Edinb., Sect. A 1978, 80: 99–137. 10.1017/S0308210500010167
Angell JS, Olmstead WE: Singular perturbation analysis of an integrodifferential equation modelling filament stretching. Z. Angew. Math. Phys. 1985, 36: 487–490. 10.1007/BF00944639
Angell JS, Olmstead WE: Singularly perturbed Volterra integral equations. SIAM J. Appl. Math. 1987, 47: 1150–1162. 10.1137/0147077
Bijura AM: Singularly perturbed Volterra integro-differential equations. Quaest. Math. 2002, 25: 229–248. 10.2989/16073600209486011
Doolan EP, Miller JJ, Schilders WHA: Uniform Numerical Methods for Problems with Initial and Boundary Layer. Boole, Dublin; 1980.
Farrel PA, Hegarty AF, Miller JJH, O’Riordan E, Shishkin GI: Robust Computational Techniques for Boundary Layers. Chapman & Hall/CRC, Boca Raton; 2000.
Miller JJH, O’Riordan E, Shishkin GI: Fitted Numerical Methods for Singular Perturbation Problems. World Scientific, Singapore; 1996.
Roos HG, Stynes M, Tobiska L: Numerical Methods for Singularly Perturbed Differential Equation: Convection-Diffusion and Flow Problems. Springer, Berlin; 1996.
Roos HG, Stynes M, Tobiska L: Robust Numerical Methods for Singularly Perturbed Differential Equations. Springer, Berlin; 2008.
Kauthen JP: Implicit Runge-Kutta methods for some integrodifferential-algebraic equations. Appl. Numer. Math. 1993, 13: 125–134. 10.1016/0168-9274(93)90136-F
Kauthen JP: Implicit Runge-Kutta methods for singularly perturbed integro-differential systems. Appl. Numer. Math. 1995, 18: 201–210. 10.1016/0168-9274(95)00053-W
Kauthen JP: A survey of singularly perturbed Volterra equations. Appl. Numer. Math. 1997, 24: 95–114. 10.1016/S0168-9274(97)00014-7
Salama AA, Evans DJ: Fourth order scheme of exponential type singularly perturbed Volterra integro-differential equations. Int. J. Comput. Math. 2001, 77: 153–164. 10.1080/00207160108805058
Horvat V, Rogina M: Tension spline collocation methods for singularly perturbed Volterra integro-differential and Volterra integral equations. J. Comput. Appl. Math. 2002, 140: 381–402. 10.1016/S0377-0427(01)00517-9
Parand K, Rad JA: An approximation algorithm for the solution of the singularly perturbed Volterra integro-differential and Volterra integral equations. Int. J. Nonlinear Sci. 2011, 12: 430–441.
Ramos JI: Piecewise-quazilinearization techniques for singularly perturbed Volterra integro-differential equations. Appl. Math. Comput. 2007, 188: 1221–1233. 10.1016/j.amc.2006.10.076
Salama AA, Bakr AA: Difference schemes of exponential type for singularly perturbed Volterra integro-differential problems. Appl. Math. Model. 2007, 31: 866–879. 10.1016/j.apm.2006.02.007
Wu S, Gan S: Errors of linear multistep methods for singularly perturbed Volterra delay-integro-differential equations. Math. Comput. Simul. 2009, 79: 3148–3159. 10.1016/j.matcom.2009.03.006
Linss T: Layer-Adapted Meshes for Reaction-Convection-Diffusion Problems. Springer, Berlin; 2010.
Amiraliyev GM, Şevgin S: Uniform difference method for singularly perturbed Volterra integro-differential equations. Appl. Math. Comput. 2006, 179: 731–741. 10.1016/j.amc.2005.11.155
Courant R II. In Differential and Integral Calculus. Interscience, New York; 1936.
Amiraliyev GM, Mamedov YD: Difference schemes on the uniform mesh for singularly perturbed pseudo-parabolic equations. Turk. J. Math. 1995, 19: 207–222.
Amiraliyev GM, Kudu M, Duru H: Uniform difference method for a parameterized singular perturbation problem. Appl. Math. Comput. 2006, 175: 89–100. 10.1016/j.amc.2005.07.068
Amiraliyev GM: The convergence of a finite difference method on layer-adapted mesh for a singularly perturbed system. Appl. Math. Comput. 2005, 162: 1023–1034. 10.1016/j.amc.2004.01.015
Ascher UM, Mattheij RM, Russell RD: Numerical Solution of Boundary Value Problems for Ordinary Differential Equations. SIAM, Philadelphia; 1995.
Cakir M, Amiraliyev GM: Numerical solution of a singularly perturbed three-point boundary value problem. Int. J. Comput. Math. 2007, 84: 1465–1481. 10.1080/00207160701296462
Acknowledgements
The author are indebted to Professor Gabil M Amiraliyev for various valuable suggestions and constructive criticism. Moreover, the author wishes to thank the anonymous referees for their very useful comments and suggestions.
Author information
Authors and Affiliations
Corresponding author
Additional information
Competing interests
The author declares that he has no competing interests.
Rights and permissions
Open Access This article is distributed under the terms of the Creative Commons Attribution 2.0 International License (https://creativecommons.org/licenses/by/2.0), which permits unrestricted use, distribution, and reproduction in any medium, provided the original work is properly cited.
About this article

Cite this article
Şevgin, S. Numerical solution of a singularly perturbed Volterra integro-differential equation. Adv Differ Equ 2014, 171 (2014). https://doi.org/10.1186/1687-1847-2014-171
Received:
Accepted:
Published:
DOI: https://doi.org/10.1186/1687-1847-2014-171