
Abstract
We consider the problem of finding a function u from the boundary data and , satisfying a nonhomogeneous elliptic equation
The problem is shown to be ill-posed. In this paper, we apply the Fourier transform to get an integral equation and give a regularized solution by directly perturbing this equation in combination with truncating high frequencies. The error estimate between the regularization solution and the exact solution is established. Finally, we present a numerical result which shows the effectiveness of the proposed method.
MSC:31A25, 34K29, 35J05, 35J25, 35J99, 42A38, 44A35.
Similar content being viewed by others

1 Introduction
In this paper, we consider a problem of recovering the interior temperature from surface data (or boundary data). In fact, the interior temperature of a body (e.g., the skin of a missile) cannot be determined in several engineering contexts (see, e.g., [1–5]) and many industrial applications. Hence, in order to get the distribution of interior temperature, we have to use the measured temperature outside the surface. In optoelectronics, the determination of a radiation field surrounding a source of radiation (e.g., a light emitting diode) is a frequently occurring problem. As a rule, experimental determination of the whole radiation field is not possible. Practically, we are able to measure the electromagnetic field only on some subset of physical space (e.g., on some surfaces). So, the problem arises how to reconstruct the radiation field from such experimental data (see, for instance, [6]). In the paper of Reginska [6], the authors considered a physical problem which is connected with the notion of light beams. Some applications of this model can be established in more detail in [6].
Precisely, we consider a two-dimensional body represented by the domain . Let be the temperature of the body at , and let be a given source, we have the following nonhomogeneous equation:
where . We assume that the temperature on the line is known, i.e.,
and that
where , are given functions in . The problem can be referred to as a sideways elliptic problem and the interior measurement is also called (in geology) the borehole measurement.
The latter problem is a Cauchy elliptic problem in an infinite strip and is well known as an ill-posed problem, i.e., solutions of the problem do not always exist and, whenever they do exist, there is no continuous dependence on the given data. This makes the numerical computations become difficult. So, ill-posed problems need to be regularized.
The homogeneous problem () was studied with various methods in many papers. Using the boundary element method, the homogeneous problems were considered in [2, 7, 8]etc. Similarly, many methods have been investigated to solve the Cauchy problem for a linear homogeneous elliptic equation such as the method of successive iterations [8, 9], the optimization method [10, 11], the quasi-reversibility method [12–14], fourth-order modified method [15, 16], Fourier truncation regularized (or spectral regularized method) [17–19], etc. The number of papers devoted to the Cauchy problem for linear homogeneous elliptic equation are very rich, for example, [7, 20–23] and the references therein.
Although there are many papers on homogeneous cases, we only find a few papers on nonhomogeneous sideways problems (for both parabolic and elliptic equations). The main aim of this paper is to present a simple and effective regularization method, and investigate the error estimate between the regularization solution and the exact solution. In a sense, this paper is an extension of recent results in [4, 9–11, 22, 24].
The paper is organized as follows. In Section 2, we present the formulation of the Cauchy problem for the elliptic equation and propose a modified regularization method. The error estimate is given based on two different a priori assumptions for the exact solution. Finally, in Section 3, we give a numerical example to demonstrate the effectiveness of our proposed method.
2 Regularization and error estimate
Let be the Fourier transform of function . By taking Fourier transformation with respect to variable , we transform problem (1)-(3) to the following form:
In the present paper, by approximating (4), we have a regularized solution , the Fourier transform of which is
or
Here, and are positive numbers (called regularization parameters) which depend on ϵ. They will be chosen later such that and when . For convenience, from now on, we denote by α, and by β.
In practice, the exact data is given only by measurement. Assume that the exact data and the noisy data both belong to and satisfy the following noise level
Let and be the solutions of problem (6) corresponding to the exact data and the measured data , respectively. Here, we denote by the norm on . By taking the Fourier transform of and , we have
We first have the following lemma.
Lemma 1 (The stability of a solution of problem (5))
Suppose that and , . Then we have
for all .
Proof From (7) and (8), we have
Using the inequality , we obtain
Note that , for , then from (9) and (10) we get
Applying the inequality for , we obtain
This completes the proof of Lemma 1. □
Theorem 1 Assume that is the exact solution of problem (1)-(3) corresponding to the exact data and that are the measured data satisfying , . Moreover, if we assume in addition that and . Then, with and , we can construct from , a function for every
where
Proof From (4), we have
Taking into account (7) and (11), we get
Moreover, one has, for ,
By a similar way, we also have
Moreover, using the inequality , we have
From (7), (11), (13), (14), (15), we obtain
It follows from that
Applying the inequality for , we obtain
According to the triangle inequality,
so using Parseval’s equality, (16) and Lemma 1, we get
The choice of and leads to
where
This completes the proof of Theorem 1. □
Remark Theorem 1 gives a good approximation not only in the case but also in the case .
If we choose , , and , , then and
Let and , we have Theorem 1.
3 Numerical experiment
In this section, we present a simple example intended to demonstrate the usefulness of the approach. The test was performed using Matlab 6.1. The numerical example was constructed in the following way: first we selected the initial data and . We have the following problem
where u satisfies
Let , be the disturbed measure data such that , .
For example, we take
In the numerical experiment, we always fix the interval .
For an exact data function , its discrete noisy version is
where
and
The function generates arrays of random numbers whose elements are normally distributed with mean 0, variance , and SD . N is the total test points at x-axis. In our computations, we always take . Let us define the error estimate between the exact solution and regularized solutions at given value y
Here, regularized solutions are calculated by the first regularization solution () with , and the second regularization () with , .
Table 1 shows the error estimate between the exact solution and the regularized solutions. In the table, we see that when the error estimations of the first method are slightly better than the error estimations of the second method. However, starting from , the second method gradually gives much better results.
Because the error estimations in are relatively big, it is difficult to see the effectiveness of our methods. For a better illustration, we define the relative error estimate between exact solution and regularized solutions as follows:
Table 2 shows the relative error estimations between the exact solution and the first regularized solution () and by the second regularization solution (). Obviously from the table, our proposed method is stable and effective.
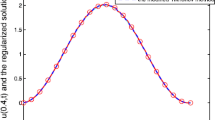
We also present some graphical representations of the exact solution and regularized solutions. Figure 2 is the 3-D representation of these solutions, and Figure 1 shows some graphs of section cut at value , with , . From the graphs, we see that the second method gives very precise solution when .

2D graphs of section cut at of the exact solution and regularized solutions .

3D graphs of the exact solution and regularized solutions .
References
Beskos DE: Boundary element method in dynamic analysis: Part II (1986-1996). Appl. Mech. Rev. 1997, 50: 149-197. 10.1115/1.3101695
Chen JT, Wong FC: Dual formulation of multiple reciprocity method for the acoustic mode of a cavity with a thin partition. J. Sound Vib. 1998., 217: Article ID 7595
Harari I, Barbone PE, Slavutin M, Shalom R: Boundary infinite elements for the Helmholtz equation in exterior domains. Int. J. Numer. Methods Eng. 1998, 41: 1105-1131. 10.1002/(SICI)1097-0207(19980330)41:6<1105::AID-NME327>3.0.CO;2-0
Marin L, Elliott L, Heggs PJ, Ingham DB, Lesnic D, Wen X: Conjugate gradient-boundary element solution to the Cauchy problem for Helmholtz-type equations. Comput. Mech. 2003,31(3-4):367-377.
Marin L, Lesnic D: The method of fundamental solutions for the Cauchy problem associated with two-dimensional Helmholtz-type equations. Comput. Struct. 2007,83(4-5):267-278.
Reginska T, Tautenhahn U: Conditional stability estimates and regularization with applications to Cauchy problems for the Helmholtz equation. Numer. Funct. Anal. Optim. 2009, 30: 1065-1097. 10.1080/01630560903393170
Cheng J, Hon YC, Wei T, Yamamoto M: Numerical computation of a Cauchy problem for Laplace equation. Z. Angew. Math. Mech. 2001, 81: 665-674.
Denisov AM, Zakharov EV, Kalinin AV, Kalinin VV: Numerical methods for some inverse problems of heart electrophysiology. Differ. Equ. 2009,45(7):1034-1043. 10.1134/S0012266109070106
Kozlov VA, Mazya VG, Fomin AV: An iterative method for solving the Cauchy problem for elliptic equations. Zh. Vychisl. Mat. Mat. Fiz. 1991,31(1):64-74.
Hao DN, Lesnic D: The Cauchy problem for Laplaces equation via the conjugate gradient method. IMA J. Appl. Math. 2000, 65: 199-217. 10.1093/imamat/65.2.199
Kabanikhin SI, Karchevsky AL: Optimizational method for solving the Cauchy problem for an elliptic equation. J. Inverse Ill-Posed Probl. 1995,3(1):21-46.
Qian Z, Fu CL, Li ZP: Two regularization methods for a Cauchy problem for the Laplace equation. J. Math. Anal. Appl. 2008,338(1):479-489. 10.1016/j.jmaa.2007.05.040
Qian A, Xiong X-T, Wu YJ: On a quasi-reversibility regularization method for a Cauchy problem of the Helmholtz equation. J. Comput. Appl. Math. 2010,233(8):1969-1979. 10.1016/j.cam.2009.09.031
Tuan NH, Trong DD, Quan PH: A new regularization method for a class of ill-posed Cauchy problems. Sarajevo J. Math. 2010,6(19)(2):189-201.
Qian Z, Fu CL, Xiong XT: Fourth-order modified method for the Cauchy problem for the Laplace equation. J. Comput. Appl. Math. 2006,192(2):205-218. 10.1016/j.cam.2005.04.031
Shi R, Wei T, Qin HH: A fourth-order modified method for the Cauchy problem of the modified Helmholtz equation. Numer. Math., Theory Methods Appl. 2009, 2: 326-340.
Fu CL, Feng XL, Qian Z: The Fourier regularization for solving the Cauchy problem for the Helmholtz equation. Appl. Numer. Math. 2009,59(10):2625-2640. 10.1016/j.apnum.2009.05.014
Qian A, Mao J, Liu L: A spectral regularization method for a Cauchy problem of the modified Helmholtz equation. Bound. Value Probl. 2010., 2010: Article ID 212056
Tuan NH, Trong DD, Quan PH: A note on a Cauchy problem for the Laplace equation: regularization and error estimates. Appl. Math. Comput. 2010,217(7):2913-2922. 10.1016/j.amc.2010.09.019
Berntsson F, Eldren L: Numerical solution of a Cauchy problem for the Laplace equation. Inverse Probl. 2001, 17: 839-853. 10.1088/0266-5611/17/4/316
Chakib A, Nachaoui A: Convergence analysis for finite-element approximation to an inverse Cauchy problem. Inverse Probl. 2006., 22: Article ID 1191206
Klibanov MV, Santosa F: A computational quasi-reversibility method for Cauchy problems for Laplaces equation. SIAM J. Appl. Math. 1991, 51: 1653-1675. 10.1137/0151085
Takeuchi T, Imai H: Direct numerical simulations of Cauchy problems for the Laplace operator. Adv. Math. Sci. Appl. 2003, 13: 587-609.
Marin L, Elliott L, Heggs PJ, Ingham DB, Lesnic D, Wen X: BEM solution for the Cauchy problem associated with Helmholtz-type equations by the Landweber method. Eng. Anal. Bound. Elem. 2004,28(9):1025-1034. 10.1016/j.enganabound.2004.03.001
Acknowledgements
This project was supported by Ton Duc Thang University (FOSTECH). The authors would like to thank the anonymous referees for their valuable suggestions and comments leading to the improvement of our manuscript. We would like to thank Truong Trong Nghia in School of Computing, the University of Utah, USA for his most helpful comments on numerical results.
Author information
Authors and Affiliations
Corresponding author
Additional information
Competing interests
The authors declare that they have no competing interests.
Authors’ contributions
All authors contributed equally and significantly in writing this paper. All authors read and approved the final manuscript.
Authors’ original submitted files for images
Below are the links to the authors’ original submitted files for images.
{kind=link}
{kind=link}
Rights and permissions
Open Access This article is distributed under the terms of the Creative Commons Attribution 2.0 International License (https://creativecommons.org/licenses/by/2.0), which permits unrestricted use, distribution, and reproduction in any medium, provided the original work is properly cited.
About this article
Cite this article
Nguyen, T.H., Tran, B.T. Recovery the interior temperature of a nonhomogeneous elliptic equation from boundary data. J Inequal Appl 2014, 19 (2014). https://doi.org/10.1186/1029-242X-2014-19
Received:
Accepted:
Published:
DOI: https://doi.org/10.1186/1029-242X-2014-19