
Abstract
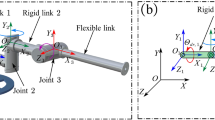
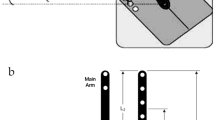
In this paper, an optimal trajectory planning method with vibration reduction for a dual-arm space robot with front flexible links is proposed using Particle Swarm Optimization (PSO), where the motion trajectory is described by the use of a fourth-order quasi-uniform B-spline with control points as parameters to be optimized. Based on the singularly perturbed description of a flexible robot dynamics, a performance index for trajectory planning with vibration reduction is proposed and is implemented by an improved PSO algorithm. Finally, some numerical examples are employed to demonstrate the effectiveness of the proposed approach.
Similar content being viewed by others

Author information
Authors and Affiliations
Rights and permissions
About this article
Cite this article
Wu, H., Sun, F., Sun, Z. et al. Optimal Trajectory Planning of a Flexible Dual-Arm Space Robot with Vibration Reduction. Journal of Intelligent and Robotic Systems 40, 147–163 (2004). https://doi.org/10.1023/B:JINT.0000038946.21921.c7
Issue Date:
DOI: https://doi.org/10.1023/B:JINT.0000038946.21921.c7