
Abstract
In this paper, a method for determination of developable spherical orthotomic ruled surfaces is given by using dual vector calculus. We show that dual vectorial expression of a developable spherical orthotomic ruled surface can be obtained from coordinates and the first derivatives of the base curve. The paper concludes with an example related to this method.
Similar content being viewed by others

Avoid common mistakes on your manuscript.
1 Introduction
In geometry, a surface is called a ruled surface if it is swept out by a moving line in \(\mathbb {R}^{3}\). The theory of ruled surfaces is a classical subject in differential geometry. It is well known that developable surfaces are special cases of ruled surfaces [18]. Developable surfaces have a very important place in mathematics and engineering such as motion analysis or designing cars and ships.
Let \(\alpha \) be a regular curve and \(\overrightarrow{T}\) be its tangent, and let \(u\) be a source. An orthotomic of \(\alpha \) with respect to the source (\(u\)) is defined as a locus of reflection of \(u\) about tangents \( \overrightarrow{T}\) [8]. Bruce and Giblin applied the unfolding theory to the study of the evolutes and orthotomics of plane and space curves [3–5]. Georgiou, Hasanis and Koutroufiotis investigated the orthotomics in the Euclidean (n \(+\) 1) space [7]. Alamo and Criado studied the antiorthotomics in the Euclidean (n \(+\) 1)-space [1]. Xiong defined the spherical orthotomic and the spherical antiorthotomic [20]. Also, an orthotomic concept can be applied to surface. For a given surface \(S\) and a fixed point (source) \(P\), orthotomic surface of \(S\) relative to \(P\) is defined as a locus of reflection of \(P\) about all tangent planes of \(S\) [11].
Dual numbers were defined by Clifford (1873) with the aid of real numbers. After him E. Study has done fundamental research with dual numbers and dual vectors on the geometry of lines and kinematics [2] introducing what is now called the Study mapping. This mapping constitutes a one-to-one correspondence between the dual points of dual unit sphere \(S^{2}\) and the directed lines of space of lines \(\mathbb {R}^{3}\) [19]. Therefore, the motion locus of a straight line in \(\mathbb {R}^{3}\) can be identified by a point on the source of dual unit sphere \(S^{2}\) in \(\mathbb { D}\) Module \(\mathbb {D}^{3}\). Afterwards Guggenheimer studied relationship between a ruled surface in \(\mathbb {R}^{3}\) and unique dual curve on the surface of \(S^{2}\) [9].
Köse introduced a method for determination of developable ruled surfaces [13]. In this study, by using methods given [13], we construct a method for determination of developable orthotomic ruled surfaces and obtain a linear differential equation of first order.
2 Preliminaries
If \(a\) and \(a^{*}\) are real numbers and \(\varepsilon ^{2}=0\) with \( \varepsilon \notin \mathbb {R}\), a dual number can be written as \(\widehat{a} =a+\varepsilon a^{*},\) where \(\varepsilon =(0,1)\) is the dual unit.
The set \(\left\{ \widehat{a}=a+\varepsilon a^{*}\left| a,a^{*}\in \mathbb {R}\right. \right\} \) of dual numbers forms a commutative ring over \(\mathbb {R}\) and is denoted by \(\mathbb {D}\). Then the set
becomes a module over the ring \(\mathbb {D}\) which is called \(\mathbb {D}\) Module, under addition and scalar multiplication on \(\mathbb {D}\) [14]. The elements of \(\mathbb {D}^{3}\) are called dual vectors. Thus, a dual vector has the form \(\overrightarrow{\widehat{a}}=\overrightarrow{a} +\varepsilon \overrightarrow{a}^{*},\) where \(\overrightarrow{a}\) and \( \overrightarrow{a}^{*}\) are real vectors in \(\mathbb {R}^{3}\). For any vectors \(\overrightarrow{\widehat{a}}\) and \(\overrightarrow{\widehat{b}}\) in \(\mathbb {D}^{3},\) the inner product and the vector product of these vectors are defined as
and
respectively. The norm \(\left\| \overrightarrow{\widehat{a}}\right\| \) of \(\overrightarrow{\widehat{a}}=\overrightarrow{a}+\varepsilon \overrightarrow{a}^{*}\) is defined as
The dual vector \(\overrightarrow{\widehat{a}}\) with norm \(1\) is called a dual unit vector. The set of dual unit vectors
is called the dual unit sphere.
Theorem 1
The Study Mapping is a one-to-one mapping between the dual points of a dual unit sphere, in \(\mathbb {D}\) Module, and the oriented lines in the Euclidean line space \(\mathbb {E}^{3}\) [10]\(.\)
According to Theorem 1, the unit dual vector \(\overrightarrow{\widehat{a}}= \overrightarrow{a}+\varepsilon \overrightarrow{a}^{*}\) corresponds to only oriented line; where the real vector \(\overrightarrow{a}\) shows the direction of this line and the real vector \(\overrightarrow{a}^{*}\) shows the vectorial moment of the unit vector \(\overrightarrow{a}\) with respect to the origin point.
Let \(\widehat{S}^{2},O\) and \(\left\{ O;\overrightarrow{\widehat{e}}_{1}, \overrightarrow{\widehat{e}}_{2},\overrightarrow{\widehat{e}}_{3}\right\} \) denote the unit dual sphere, the center of \(\widehat{S}^{2}\) and dual orthonormal system at \(O\), respectively, where
Let \(S_{3}\) be the group of permutations of \(\left\{ 1,2,3\right\} ,\) then it can be written as
In the case that the orthonormal system
is the system of \(\mathbb {E}^{3}\).
By using the Study Mapping, we can conclude that there exists a one-to-one correpondence between the dual orthonormal system and the real orthonormal system.
Now, define of spherical normal, spherical tangent and spherical orthotomic of a spherical curve \(\alpha \). Let \(\left\{ \overrightarrow{T}, \overrightarrow{N},\overrightarrow{B}\right\} \) be the Frenet frame of \( \alpha \). The spherical normal of \(\alpha \) is the great circle, passing through \(\alpha (s),\) that is normal to \(\alpha \) at \(\alpha (s)\) and given by
where \(x\) is an arbitrary point of the spherical normal. The spherical tangent of \(\alpha \) is the great circle which tangent to \(\alpha \) at \( \alpha (s)\) and given by
where \(y\) is an arbitrary point of the spherical tangent.
Let \(u\) be a source on a sphere. Then, Xiong defined the spherical orthotomic of \(\alpha \) relative to \(u\) as to be the set of reflections of \(u\) about the planes, lying on the above great circles (2.1) for all \(s\in I\) and given by
where \(\overrightarrow{v}=\frac{\overrightarrow{B}-\left\langle \overrightarrow{B},\overrightarrow{\alpha }\right\rangle \overrightarrow{ \alpha }}{\left\| \overrightarrow{B}-\left\langle \overrightarrow{B}, \overrightarrow{\alpha }\right\rangle \overrightarrow{\alpha }\right\| } \) [21].
3 The dual vector formulation
Let \(L\) be a line and \(x\) denotes the direction and \(p\) be the position vector of any point on \(L\). Dual vector representation allows us the Plucker vectors \(x\) and \(p\wedge x\). Thus, dual vector \(\widehat{x}(t)\) can be written as
where \(\varepsilon \) is called the dual unit and \(\varepsilon ^{2}=0\).
By using the dual vector function \(\widehat{x}(t)=x(t)+\varepsilon (p(t)\wedge x(t))=x(t)+\varepsilon x^{*}(t)\), a ruled surface can be given as
It is known that the dual unit vector \(\widehat{x}(t)\) is a differentiable curve on a dual unit sphere and also having unit magnitude [15]:
The dual arc-length of the ruled surface \(\widehat{x}(t)\) is defined by
The integrant of the Eq. (3.1) is the dual speed \(\widehat{\delta }\) of \(\widehat{x}(t)\) and is
The curvature function
is the well-known distribution parameter (drall) of the ruled surface.
4 The determination of a developable ruled surface
Let \(\widehat{x}(t)\) be a point on the dual unit sphere. The dual coordinates of \(\widehat{x}(t)=x_{i}+\varepsilon x_{i}^{*}\) can be expressed as
where \(\widehat{\varphi }=\varphi +\varepsilon \varphi ^{*},\)\(\widehat{ \theta }=\theta +\varepsilon \theta ^{*}\) are dual angles.
Since \(\varepsilon ^{2}=\varepsilon ^{3}=\cdots =0\) according to the Taylor series expansion from (4.1), we obtain the real parts as
and the dual parts as
Hence, we conclude that a dual curve \(\widehat{x}(t)=x(t)+\varepsilon x^{*}(t)\) can be written as
Let \(\widehat{\sigma }(t)={\sigma }(t)+\varepsilon {\sigma }^{*}(t)\) be spherical orthotomic of the great circle, which lies on the \(\overrightarrow{ \widehat{e}}_{2}\overrightarrow{\widehat{e}}_{3}\) plane, relative to the dual curve \(\widehat{x}(t)\). By (2.2), we get \(\widehat{\sigma }(t)=\left( -\widehat{x}_{1},\widehat{x}_{2},\widehat{x} _{3}\right) \) where \(\widehat{x}_{i}\)’s are the coordinates of \(\widehat{x} (t)\) for \(i=1,2,3.\) By considering the spherical orthotomic dual curve, we have:
on the dual unit sphere corresponding to ruled surface
where \(q(t)\) is a base curve of the ruled surface. Since \(\sigma ^{*}(t)=\)\(q(t)\wedge \sigma (t),\) we have the following system of linear equations in variables\( Q_{1},Q_{2},Q_{3}\);
where \(Q_{i}\)’s are the coordinates of \(q(t)\) for \(i=1,2,3\). The matrix of coefficients of unknows \(Q_{1},Q_{2},\) and \(Q_{3}\) is skew a symmetric matrix
and therefore its rank is \(2\) with \(\theta (t)\ne 2k\pi ,k\in \mathbb {Z}\). The rank of the augmented matrix
is \(2\). Thus this system of linear equations have infinite solutions given by
Since \(Q_{3}(t)\) can be chosen arbitrarily, we may take that \( Q_{3}(t)=-\varphi ^{*}(t)\). In this case, (4.2) reduces to
The distribution parameter of the ruled surface given (3.2 ) is obtained as follows
If this spherical orthotomic ruled surface is developable, then \(\Delta =0\) and by (4.4), we get
Setting
we are lead to a linear differential equation of first order
If we assume that \(\varphi (t)\) and \(\theta (t)\) are both constants, then (4.5) is identically zero, that is, the spherical orthotomic ruled surface \(\widehat{\sigma }(t)\) is a cylinder.
Let \(q(t)\) be a curve. Then we can find a developable spherical orthotomic ruled surface such that, its base curve is the curve \(q(t)\) and by (4.3), we have
Now we need to determine \(\theta (t)\). The solution of (4.5) gives \(\cot \theta \). This solution includes an integral constant, thus we have infinitely many developable spherical orthotomic ruled surfaces such that each of them has a base curve \(q(t)\).
Moreover, note that \(\theta ^{*}(t)\), given by (4.6), has two values; by using the minus sign, then we obtain the reciprocal of the spherical orthotomic ruled surfaces obtained by using the plus sign for a given integral constant.
Example 1
Consider the curve \(q(t)=(t^{2},t^{2},2t+1)\)
Then
and
we substitute these values into (4.5) and solve this differential equation
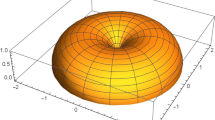
Hence, the family of the developable ruled surface is given by
where
The graph of the developable spherical orthotomic ruled surface given by this equation for \(C=0\) in domain
is given in Figure 1.

Spherical orthotomic ruled surface
For the spherical orthotomic of the great circle which lies on the \(\overrightarrow{\widehat{e}}_{1} \overrightarrow{\widehat{e}}_{3}\) plane, relative to the dual curve \( \widehat{x}\) is
We obtain the distribution parameter same as the first choosing. But in this case unknowns \(Q_{1},Q_{2},\) and \(Q_{3}\) are
Consider the same curve \(q(t)=(t^{2},t^{2},2t+1),\) the spherical orthotomic ruled surface is obtained as
The graph is the same as the previous.
For the plane spanned by \(\left\{ \overrightarrow{\widehat{e}}_{1}, \overrightarrow{\widehat{e}}_{2}\right\} ,\) we obtain the same distribution parameter and the same differential equation with
For \(q(t)=(t^{2},t^{2},2t+1),\) the spherical orthotomic ruled surface is
and the graph is the same as the other ones.
References
Alamo, N., Criado, C.: Generalized antiorthotomics and their singularities. Inverse Problems 18(3), 881–889 (2002)
Blaschke, W.: Vorlesungen Über Differential geometry I. Verlag von Julieus Springer in Berlin, pp. 89 (1930)
Bruce, J.W.: On singularities, envelopes and elementary differential geometry. Math. Proc. Cambridge Philos. Soc. 89(1), 43–48 (1981)
Bruce, J.W., Giblin, P.J.: Curves and singularities. A geometrical introduction to singularity theory. University Press, Cambridge (1992)
Bruce, J.W., Giblin, P. J.: One-parameter families of caustics by reflexion in the plane. Quart. J. Math. Oxford Ser. (2), 35(139), 243–251 (1984).
Ekici, C., Özüsağlam, E.: On the method of determination of a developable timelike ruled surface. Kuwait J. Sci. Eng. 39(1A), 19–41 (2012)
Georgiou, C., Hasanis, T., Koutroufiotis, D.: On the caustic of a convex mirror. Geom. Dedicata 28(2), 153–169 (1988)
Elementary geometry of differentiable curves. Cambridge University Press, Cambridge (2011)
Differential geometry. Dover, New York (1977)
Hacısalihoğlu, H.H.: Acceleration axes in spatial kinematics I. Communications de la Faculte des Sciences de L’Universite d’Ankara. Serie A, Tome 20 A, Annee pp. L-15 (1971).
Hoschek, J.: Smoothing of curves and surfaces. Computer aided geometric design, Vol. 2, No. 1–3, special issue, pp. 97–105 (1985).
Karadağ, H.B., Kılıç, E., Karadağ, M.: On the developable ruled surfaces kinematically generated in Minkowski 3-space. Kuwait J. Sci. Eng. 41(1), 19–41 (2012)
Köse, Ö.: A method of the determination of a developable ruled surface. Mech. Mach. Theory. 34, 1187–1193 (1999)
Köse, Ö.: Contributions to the theory of integral invariants of a closed ruled surface. Mechanism and Machine Theory 32(2), 261–277 (1997)
McCarthy, J.M.: On the scalar and dual formulations of the curvature theory of line trajectories. ASME Journal of Mechanisms, Transmissions and Automation in Design 109/101 (1987).
Müller, H.R.: Kinematik dersleri, Ankara University Press, pp. 247–267-271, (1963).
Nomizu, K.: Fundamentals of linear algebra, Mc Graw-Hill, Book Company. London Lib. Cong. Cat. Card Numb. 65–28732, 52–67 (1966)
O’Neill, B.: Semi-Riemannian geometry. Academic Press, New York (1983)
Study, E.: Geometrie der Dynamen, Leibzig (1903).
Xiong, J.F.: Geometry and singularities of spatial and spherical curves. University of Hawai, The degree of Doctor of Philosophy, Hawai (2004)
Xiong, J.F.: Spherical orthotomic and spherical antiorthotomic. Acta Mathematica Sinica 23(9), 1673–1682 (2007)
Acknowledgments
The authors would like to thank the anonymous referees for their helpful suggestions and comments which improved significantly the presentation of the paper.
Author information
Authors and Affiliations
Corresponding author
Additional information
Communicated by S. K. Jain.
Rights and permissions
Open Access This article is distributed under the terms of the Creative Commons Attribution License which permits any use, distribution, and reproduction in any medium, provided the original author(s) and the source are credited.
About this article

Cite this article
Yıldız, Ö.G., Karakuş, S.Ö. & Hacısalihoğlu, H.H. On the determination of a developable spherical orthotomic ruled surface. Bull. Math. Sci. 5, 137–146 (2015). https://doi.org/10.1007/s13373-014-0063-5
Received:
Revised:
Accepted:
Published:
Issue Date:
DOI: https://doi.org/10.1007/s13373-014-0063-5