
Abstract
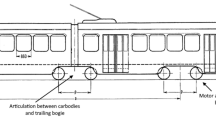
The urban tram introduced recently has a low-floor structure for the convenience of passengers getting on and off. To adjust the low-floor level and improve performance on curves, most low-floor trams have IRWs (independently rotating wheels) with no central axle between the two wheels. Eliminating the central axle, however, creates several inherent problems, such as insufficient guiding force and excessive wear. To analyze these problems, a new analytical model is described in this paper to describe the dynamic characteristics of IRWs more precisely. This analytical model is developed to consider the effects of longitudinal creep in particular, which have been ignored in conventional analytical models of IRWs. In addition, a running stability analysis based on the newly developed analytical model is conducted to compare the critical speeds of IRW-axle vehicles and rigid-axle vehicles. The dynamic characteristics of an initial disturbance are compared to verify that the analytical model is effective in expressing the dynamic characteristics of IRWs.
Similar content being viewed by others

Abbreviations
- mw :
-
wheelset mass, mt: Bogie frame mass
- mc :
-
car body mass
- Iwx :
-
roll moment of inertia of the wheelset
- Iwy :
-
spin moment of inertia of the wheelset
- Iwz :
-
yaw moment of inertia of the wheelset
- Iw1 :
-
roll moment of inertia of the wheel
- Itx :
-
roll moment of inertia of the bogie frame
- Itz :
-
yaw moment of inertia of the bogie frame
- Icz :
-
yaw moment of inertia of the car body
- r0 :
-
Wheel radius, a: Half of the truck gauge
- b1 :
-
half of the primary longitudinal spring arm
- b2 :
-
half of the secondary longitudinal spring arm
- b3 :
-
half of the secondary vertical damping arm
- L1 :
-
half of the primary lateral spring arm
- L2 :
-
half of the primary lateral damping arm
- LC :
-
half of the distance between bogie center
- λ :
-
wheel conicity
- Kpx :
-
longitudinal stiffness of the 1st suspension
- Kpy :
-
lateral stiffness of the 1st suspension
- Kpz :
-
vertical stiffness of the 1st suspension
- Cpx :
-
longitudinal damping of the 1st suspension
- Cpy :
-
lateral damping of the 1st suspension
- Cpz :
-
vertical damping of the 1st suspension
- Csx :
-
longitudinal damping of the 2nd suspension
- Csy :
-
lateral damping of the 2nd suspension
- Ksx :
-
longitudinal stiffness of the 2nd suspension
- Ksy :
-
lateral stiffness of the 2nd suspension
- f11 :
-
lateral creep force coefficient
- f12 :
-
lateral/spin creep force coefficient
- f22 :
-
spin creep force coefficient
- f33 :
-
longitudinal creep force coefficient
- WA :
-
axle load
- FLx, FLy, FRx and FRy :
-
Kalker’s creep force
- MLx, MRx, MLy and MRy :
-
Kalker’s creep moment
- Ft :
-
Flange contact force, Kr: Lateral rail stiffness
- μ:
-
Friction coefficient, δ: Flange clearance
References
Dukkipati, R. V. and Narayana Swamy, S. (1992). Independently rotating wheel systems for railway vehicles — A state of the art review. Vehicle System Dynamics, 21, 297–330.
Feng, J., Li, J. and Goodall, R. M. (2008). Integrated control strategies for railway vehicles with independently-driven wheel motors. Front. Mech. Eng., China, 239–250.
Garg, V. K. and Dukkipati, R. V. (1984). Dynamics of Railway Vehicle Systems. Academic Press. Canada.
Goodall, R. M. and Hong, L. (2000). Solid axle and independently rotating wheelsets — A control engineering assessment of stability. Vehicle System Dynamics, 33, 57–67.
Gretzschel, M. and Bose, L. (2002). A new concept for integrated guidance and drive of railway running gears. Control Engineering Practice, 10, 1013–1021.
Ko, Y. E. and Song, C. K. (2010). Vehicle modeling with nonlinear tires for vehicle stability analysis. Int. J. Automotive Technology 11,3, 339–344.
Lee, S. and Cheng, Y. (2008). A new dynamic model of high-speed railway vehicle moving on curved tracks. J. Vibration and Acoustics, 130, 011009-1–10.
Li, J., Goodall, R. M., Mei, T. X. and Li, H. (2003). Steering Controllers for Rail Vehicles with Independently Driven Wheel Motors. Electronic System and Control Division Research. 4–6.
Li, L., Song, J., Kong, L. and Huang, Q. (2009). Vehicle velocity estimation for real-time dynamic stability control. Int. J. Automotive Technology 10,6, 675–685.
Liang, B. and Iwnicki, S. D. (2007). An experimental study of independently rotating wheels for railway vehicles. IEEE Proc. Int. Conf. Mechatronics and Automation, 2282–2286.
Liang, B., Iwnicki, S. D. and Swift, F. J. (2004). Simulation and testing of a wheelset with induction motor. Int. Cong. Theoretical and Applied Mechanics, 10909-1–2.
Mei, T. X. and Goodall, R. M. (2001). Robust control for irw on a railway vehicle using practical sensors. IEEE Trans. Control System Technology 9,4, 599–607.
Mei, T. X. and Goodall, R. M. (2003). Practical strategies for controlling railway wheelsets independently rotating wheels. ASME, 125, 354–360.
Mei, T. X. and Li, H. (2008). Control design for the active stabilization of rail wheelsets. J. Dynamic Systems Measurement and Control, 130, 0110021–9.
Mei, T. X., Goodall, R. M. and Wickens, A. H. (2002). Dynamic and control assessment of rail vehicle using permanent magnet wheel motor. Vehicle System Dynamics Supplement, 37, 326–337.
Mei, T. X., Nagy, Z., Goodall, R. M. and Wickens, A. H. (2002). Mechatronic solutions for high speed railway vehicles. Control Engineering Practice, 10, 1023–1028.
Miyamoto, M. and Sato, T. (2001). Study on the stabilization of railway vehicles with independently rotating wheels by control of steering on wheelset (1 Axle trailer bogie). JSME, 10th Conf. Transportation 01-36, 149–152.
Obata, R., Tanifuji, K., Soma, H. and Masuda, T. (2006). Curving performance of a rail vehicle with independently rotating wheels by torque difference control. JSME, C, 72,716, 50–56.
Park, S. H., Kim, J. S. and Choi, J. J. (2009). Reference slip ratio generation and adaptive sliding mode control for railway rolling stocks. IJPEM 10,2, 39–44.
Perez, J., Busturia, J. M., Mei, T. X. and Vindas, J. (2004). Combined active and traction for mechatronic bogie vehicle with independently rotating wheels. Annual Review in Control, 28, 207–214.
Saitoh, A. and Tanifuji, K. (2002). Comparison of curving characteristics of rail vehicle with independently rotating wheels between steering methods. JSME 11th Proc. Transportation Conf. 02-50, 139–142.
Satou, T. and Miyamoto, M. (2002). Study on the stabilization of railway vehicles with independently rotating wheels by control of steering on wheelset (Model experiment and a simulation). JSME 11th Conf. Transportation 02-50, 135–138.
Suda, Y. and Maeshiro, S. (1998). Steering ability of selfsteering truck with independently rotating wheels in trailing axle. JSME, C, 64,628, 234–239.
Sugiyama, H., Matsumura, R., Suda, Y. and Ezaki, H. (2009). Analysis of independently rotating wheel system using multibody dynamics approach. ASME Int. Design Engineering Technical Conf. and Computers and Information in Engineering Conf.-IDETC/CIE, 1–8.
Yasuda, H. and Miyamoto, M. (2005). Study on the stabilization of railway vehicles with independently rotating wheels by control of steering on wheelset (control of front and rear wheelset steering). JSME Hokkaido’s 41st Proc. Basic Conf. 047-1, 181–184.
Yim, S., Cho, W., Yoon, J. and Yi, K. (2010). Optimum distribution of yaw moment for unified chassis control with limitations on the active front steering angle. Int. J. Automotive Technology 11,5, 665–672.
Zaazaa, K. E. and Whitten, B. (2007). Effect of independently rotating wheels on the dynamic performance of railroad vehicles. ASME Int. Mechanical Engineering Cong. and Exposition, 1–11.
Author information
Authors and Affiliations
Corresponding author
Rights and permissions
About this article
Cite this article
Cho, Y., Kwak, J. Development of a new analytical model for a railway vehicle equipped with independently rotating wheels. Int.J Automot. Technol. 13, 1047–1056 (2012). https://doi.org/10.1007/s12239-012-0107-3
Received:
Revised:
Accepted:
Published:
Issue Date:
DOI: https://doi.org/10.1007/s12239-012-0107-3