
Abstract
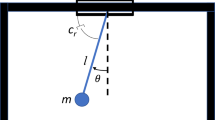
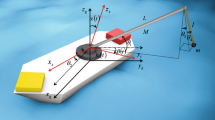
In this paper, the skew control of the load (container) in the quay crane used in the dockside of a container terminal is investigated. The mathematical model of the 3-dimensional (3D) motions of the load is first derived. The container hooked to a spreader is suspended by four ropes in air. When the container is accelerated by the trolley or is disturbed by winds, it will make a rotational motion (trim, list, and skew) as well as a sway motion in the vertical plane. In such a case, the position of the container becomes difficult to control accurately due to the rotational motion even with the sway motion under control. This paper proposes an input shaping technique for the skew control based on the 3D dynamics of the container. The adopted skew control system uses four electric motors to vary the length of the four ropes individually. Simulation results show the effectiveness of the proposed system in controlling the skew motion.
Similar content being viewed by others

References
K. T. Hong, C. D. Huh and K. S. Hong, Command shaping control for limiting the transient sway angle of crane systems, International Journal of Control, Automation and System 1(1) (2003) 43–53.
K. L Sorensen, W. Singhose and S. Dickerson, A controller enabling precise positioning and sway reduction in bridge and gantry cranes, Control Engineering Practice 15(7) (2007) 825–837.
K. S. Hong, B. J. Park and M. H. Lee, Two-stage control for container cranes, JSME International Journal, Series C 43(2) (2000) 273–282.
W. Singhose, L. Perter, M. Kenison and E. Krrikku, Effects of hoisting on the input shaping control of gantry cranes, Control Engineering Practice 8(10) (2000) 1159–1165.
K. Terashima, Y. Shen and K. Yano, Modeling and optimal control of a rotary crane using the straight transfer transformation method, Control Engineering Practice 15(9) (2007) 1179–1192.
Y. S. Kim, K. S. Hong and S. K. Sul, Anti-sway control of container cranes: Inclinometer, observer, and state feedback, International Journal of Control, Automation, and Systems 2(4) (2004) 435–449.
H. Park, D. Chwa and K. S. Hong, A feedback linearization control of container cranes: Varying rope length, International Journal of Control, Automation, and Systems 5(4) (2007) 379–387.
D. Liu, J. Yi, D. Zhao and W. Wang, Adaptive sliding mode fuzzy control for a two-dimensional overhead crane, Mechatronics 15(5) (2005) 505–512.
H. H. Lee, Y. Liang and D. Segura, A sliding-mode anti-swing trajectory control for overhead cranes with high-speed load hoisting, ASME Journal of Dynamic Systems, Measurement, and Control 128(4) (2006) 842–845.
J. H. Park and S. Rhim, Experiments of optimal delay extraction algorithm using adaptive time-delay filter for improved vibration suppression, Journal of Mechanical Science and Technology 23(4) (2009) 997–1000.
A. Turnip, K. S. Hong and S. Park, Modeling of a hydraulic engine mount for active pneumatic engine vibration control using the extended Kalman filter, Journal of Mechanical Science and Technology 23(1) (2009) 229–236.
S. H. Cho and S. Helduser, Robust motion control of a clamp-cylinder for energy-saving injection moulding machines, Journal of Mechanical Science and Technology 22(12) (2008) 2445–2453.
C. G. Kang, Variable structure fuzzy control using three input variables for reducing motion tracking errors, Journal of Mechanical Science and Technology 23(5) (2009) 1354–1364.
Mitsubishi Heavy Industries, Ltd., (2008). http://www.mhi.co.jp/en/products/detail/technology.html
B. d’Andréa-Novel and J. M. Coron, Exponential stabilization of an overhead crane with flexible cable via a back-stepping approach, Automatica 36(4) (2000) 587–593.
H. Kawai, Y. B. Kim and Y. W. Choi, Anti-sway system with image sensor for container cranes, Journal of Mechanical Science and Technology 23(10) (2009) 2757–2765.
H. C. Cho, J. W. Lee, Y. J. Lee and K. S. Lee, Lyapunov theory based robust control of complicated nonlinear mechanical systems with uncertainty, Journal of Mechanical Science and Technology 22(11) (2008) 2142–2150.
H. C. Cho and K. S. Lee, Adaptive control and stability analysis of nonlinear crane systems with perturbation, Journal of Mechanical Science and Technology 22(6) (2008) 1091–1098.
C. W. Kim, K. S. Hong and H. Park, Boundary control of an axially moving string: actuator dynamics included, Journal of Mechanical Science and Technology 19 (2005) 40–50.
M. I. Solihin and Wahyudi, Sensorless anti-swing control for automatic gantry crane system: Model-based approach, International Journal of Applied Engineering Research 2(1) (2007) 147–161.
B. Henriksson, (Applicant ABB AB), Load control device for a crane, European Patent (2008) (No. EP 1 894 881 A2).
J. B. Klaassens, G. Honderd, A. E. Azzouzi, K. C. Cheok and G. E. Smid, 3D modeling visualization for studying controls of the Jumbo container crane, Proceedings of the American Control Conference, California, USA, (1999) 1754–1758.
J. W. Lee, D. H. Kim and K. T. Park, Fuzzy control of sway and skew of a spreader by using four auxiliary cables, Proceedings of International Conference on Control, Automation, and Systems, Gyeonggi-Do, Korea, (2005) 1723–1728.
D. T. Greenwood, Advanced Dynamics, Cambridge University Press, New York, USA, (2003).
T. Singh and W. Singhose, Tutorial on input shaping/time delay control of maneuvering flexible structures, Proceedings of the American Control Conference, Anchorage, USA. (2002) 1717–1731.
Author information
Authors and Affiliations
Corresponding author
Additional information
This paper was recommended for publication in revised form by Associate Editor Kyung-Soo Kim
Quang Hieu Ngo received the B.S. degree in mechanical engineering from Ho Chi Minh City University of Technology, Vietnam, in 2002, the M.S. degree in mechatronics from Asian Institute of Technology, Thailand, in 2007. He is currently a Ph.D. candidate in the School of Mechanical Engineering, Pusan National University, Korea. His research interests include port automation, control of axially moving systems, adaptive control, and input shaping control.
Keum-Shik Hong received the B.S. degree in mechanical design and production engineering from Seoul National University in 1979, the M.S. degree in ME from Columbia University in 1987, and both the M.S. degree in applied mathematics and the Ph.D. degree in ME from the University of Illinois at Urbana-Champaign in 1991. Dr. Hong serves as Editor-in-Chief of the Journal of Mechanical Science and Technology. He served as an Associate Editor for Automatica (2000–2006) and as an Editor for the International Journal of Control, Automation, and Systems (2003–2005). Dr. Hong received Fumio Harashima Mechatronics Award in 2003 and the Korean Government Presidential Award in 2007. His research interests include nonlinear systems theory, adaptive control, distributed parameter system control, robotics, and vehicle controls.
Rights and permissions
About this article
Cite this article
Ngo, Q.H., Hong, KS. Skew control of a quay container crane. J Mech Sci Technol 23, 3332–3339 (2009). https://doi.org/10.1007/s12206-009-1020-1
Received:
Revised:
Accepted:
Published:
Issue Date:
DOI: https://doi.org/10.1007/s12206-009-1020-1