
Abstract
A numerical simulation method is developed to analyze the dynamic responses of electrostatic actuators, which are electromechanically-coupled systems. The developed method can be used to determine the dynamic responses of cantilever-type switches, which are an example of typical MEMS (Micro-Electro-Mechanical System) devices driven by an electrostatic force. We propose the approach that adopts a point charge to deal with electric field effects between electrodes. This approach may be considered as a lumped parameter model for the electrostatic interactions. An advantage of this model may be the easy incorporation of the electrostatic effects between electrodes into a multibody dynamics analysis algorithm. The resulting equations contain the variables for position, velocity, and electric charge to describe the motion of the masses and the charges on the electrodes in a system. By solving these equations simultaneously, the dynamic response of an electrostatically-driven system can be correctly simulated. In order to realize this approach, we implement the procedures into RecurDyn, the multibody dynamics software developed by the authors. The developed numerical simulation tool was evaluated by applying it to cantilever-type electrostatic switches in many different driving conditions. The results suggest that the developed tool may be useful for predicting behaviors of electrostatic actuators in testing as well as in design.
Similar content being viewed by others

Abbreviations
- Y :
-
Velocity vector in absolute coordinates
- B :
-
Velocity transformation matrix
- Φ :
-
Constraint equation for cut-joint
- Φ q :
-
Jacobian of in relative coordinates
- λ :
-
Lagrange multiplier
- ε 0 :
-
Permittivity of free space
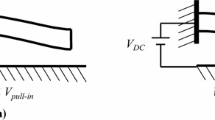
- V :
-
Driving voltage
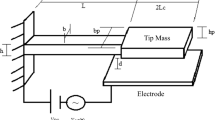
- d :
-
Normal distance between two electrodes
- d 0 :
-
Initial normal distance between two electrodes
- L :
-
Length of a beam
- b :
-
Width of a beam
- A :
-
Cross sectional area of a beam
- E :
-
Young’s modulus
- ρ :
-
Mass density
References
De, S.K., Aluru, N.R.: Full-Lagrangian schemes for dynamic analysis of electrostatic MEMS. J. Microelectromech. Syst. 13, 737–758 (2004)
Hu, Y.C., Chang, C.M., Huang, S.C.: Some design considerations on the electrostatically actuated microstructures. Sens. Actuators A 112, 155–161 (2004)
Fischer, M., Giousouf, M., Schaepperle, J., Eichner, D., Weinmann, M., von Munch, W., Assmus, F.: Electrostatically deflectable polysilicon micromirrors—dynamic behaviour and comparison with the results from FEM modeling with ANSIS. Sens. Actuators A 67, 89–95 (1998)
Shi, F., Ramesh, P., Mukherjee, S.: Dynamic analysis of micro-electro-mechanical systems. Int. J. Numer. Methods Eng. 39, 4119–4139 (1996)
Rochus, V., Rixen, D.J., Golinval, J.-C.: Electrostatic coupling of MEMS structures: transient simulations and dynamic pull-in. Nonlinear Anal. 63, e1619–e1633 (2005)
Younis, M.I., Abdel-Rahman, E.M., Nayfeh, A.: A reduced-order model for electrically actuated microbeam-based MEMS. J. Microelectromech. Syst. 12, 672–680 (2003)
Osterberg, P.M., Senturia, S.D.: M-Test: A test chip for MEMS material property measurement using electrostatically actuated test structures. J. Microelectromech. Syst. 6(2), 107–117 (1997)
Wasfy, T.M.: A tortional spring-like beam element for the dynamic analysis of flexible multibody systems. Int. J. Numer. Methods Eng. 39, 1079–1096 (1996)
Downer, J.D., Park, K.C., Chiou, J.C.: Dynamics of flexible beams for multibody system: a computational procedure. Comput. Methods Appl. Mech. Eng. 96, 373–408 (1992)
Siververg, L., Weaver, L., Jr.: Dynamics and control of electrostatic structures. J. Apps. Mech. 63, 383–391 (1996)
Lienemann, J., Rudnyi, E.B., Korvink, J.G.: MST MEMS model order reduction: requirements and benchmarks. Linear Algebra Appl. 415, 469–498 (2006)
Bae, D.S., Han, J.M., Yoo, H.H.: A generalized recursive formulation for constrained mechanical system dynamics. Mech. Struct. Mach. 27(3), 293–315 (1999)
FunctionBay, Inc.: http://www.RecurDyn.com
Kim, M.J., Moon, W.K., Bae, D.S., Park, I.H.: Dynamic simulations of electromechanical robotic systems driven by DC motors. Robotica 22, 523–531 (2004)
Yen, J., Haug, E.J., Potra, F.A.: Constrained equations of motion in multibody dynamics as ODES ON manifolds. SIAM J. Numer. Anal. 30(2), 553–568 (1993)
Elata, D., Bamberger, H.: On the dynamic pull-in of electrostatic actuators with multiple degrees of freedom and multiple voltage sources. J. Microelectromech. Syst. 15, 131–140 (2006)
McCarthy, B., Adams, G.G., McGruer, N.E., Potter, D.: A dynamic model, including contact bounce, of an electrostatically actuated micro-switch. J. MEMS 11(3), 276–283 (2002)
Author information
Authors and Affiliations
Corresponding author
Rights and permissions
About this article
Cite this article
Lee, S., Kim, J., Moon, W. et al. A multibody-based dynamic simulation method for electrostatic actuators. Nonlinear Dyn 54, 53–68 (2008). https://doi.org/10.1007/s11071-007-9268-4
Received:
Accepted:
Published:
Issue Date:
DOI: https://doi.org/10.1007/s11071-007-9268-4