
Abstract
The effects of initial conditions on the flight of an American football kicked in an end-over-end manner were investigated using a dynamic simulation employing the quaternion method. The effects of initial tilt and spin about the longitudinal axis of the ball were considered. For the most accurate kick, our simulations show that the ball should be vertical leaving the kicker’s foot, and have no angular velocity about the longitudinal axis of the ball. A case study was performed for which experimental data were available, showing the trends of the flight of the ball captured in our simulations in actual game situations.









Similar content being viewed by others

Notes
“Top 5 Reasons You Can’t Blame-Scott Norwood for Losing Super Bowl XXV,” ESPN, 2005.
Abbreviations
- \( O = \left\{ {\vec{i}_{O} , \vec{j}_{O} ,\vec{k}_{O}^{1} } \right\} \) :
-
Inertial coordinate system, point O at the spot of the kick
- \( B = \left\{ {\vec{i}_{B} , \vec{j}_{B} , \vec{k}_{B} } \right\} \) :
-
Body-fixed coordinate system, point B at CG of the ball
- \( m_{B} \) :
-
Mass of the ball (0.411 kg)
- \( ^{O} \vec{v}_{CG/O} \) :
-
Inertial velocity of the ball
- \( \vec{M}_{CG,body} \) :
-
External torque applied to ball about CG
- \( ^{O} \vec{h}_{CG,body} \) :
-
Angular momentum of the ball about CG w.r.t O-frame
- \( \vec{r}_{CG/O} \) :
-
Position vector of the CG of the ball w.r.t O-frame
- \( v_{ij} ,i = x,y,z;j = O,B \) :
-
i-Component of velocity in j-frame
- \( ^{O} \left[ C \right]^{B} \) :
-
Matrix of directional cosines between O- and B-frames
- \( ^{O} \vec{\omega }^{B} \) :
-
Angular velocity of B-frame w.r.t. O-frame
- \( \omega_{i} ,\quad i = x,y,z \) :
-
i-Component of angular velocity in B-frame
- \( I_{i} ,\quad i = x,y,z \) :
-
Moments of inertia of the ball w.r.t. B-frame axes
- \( e_{i} ,\quad i = 0,1,2,3 \) :
-
Components of unit quaternion
- \( \vec{e}_{yaw} \) :
-
Unit vector of yaw force, pitching moment
- \( \vec{e}_{lift} \) :
-
Unit vector of lift force
- \( \vec{e}_{drag} \) :
-
Unit vector of drag force
- \( \vec{F}_{aero} \) :
-
Aerodynamic force vector
- \( \vec{F}_{lift} \) :
-
Aerodynamic lift force, magnitude \( F_{lift} \)
- \( \vec{F}_{yaw} \) :
-
Aerodynamic yaw force, magnitude \( F_{yaw} \)
- \( \vec{F}_{drag} \) :
-
Aerodynamic drag force, magnitude \( F_{drag} \)
- \( \vec{F}_{aero,iB} ,\quad i = x,y,z \) :
-
Aerodynamic force components in B-frame
- \( \vec{F}_{g,iB} , \quad i = x,y,z \) :
-
Gravitational force components in B-frame
- \( M_{roll} \) :
-
Aerodynamic roll moment magnitude
- \( M_{pitch} \) :
-
Aerodynamic pitch moment magnitude
- \( M_{yaw} \) :
-
Aerodynamic yaw moment magnitude
- \( M_{aero,iB} ,\quad i = x,y,z \) :
-
Aerodynamic moment components in B-frame
- \( \theta_{wt} \) :
-
Angle of attack (degrees)
- \( \omega \) :
-
Longitudinal spin rate (rev/s)
- \( C_{D} \) :
-
Aerodynamic drag coefficient
- \( C_{L} \) :
-
Aerodynamic lift coefficient
- \( C_{Y} \) :
-
Aerodynamic yaw coefficient
- \( C_{M} \) :
-
Aerodynamic pitch moment coefficient
- \( \rho \) :
-
Density of air (1.184 kg/m3)
- \( V_{B} \) :
-
Volume of ball (4.0 × 10−3 m3)
References
Brancazio PJ (1985) The physics of kicking a football. The Physics Teacher 23(7):403–407. doi:10.1119/1.2341866
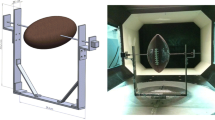
Rae WJ, Streit RJ (2002) Wind-tunnel measurements of the aerodynamic loads on an American football. Sports Eng 5(3):165–172. doi:10.1046/j.1460-2687.2002.00106.x
Watts RG, Moore G (2003) The drag force on an American football. Am J Phys 71(8):791–793. doi:10.1119/1.1578065
Rae WJ (2003) Flight dynamics of an American football in a forward pass. Sports Eng 6(3):149–163. doi:10.1007/BF02859892
Seo K, Kobayashi O, Murakami M (2006) Flight dynamics of the screw kick in rugby. Sports Eng 9(1):49–58. doi:10.1007/BF02844262
Sidi MJ (2000) Spacecraft dynamics and control: a practical engineering approach. Cambridge University Press, Cambridge
Acknowledgments
The authors would also gratefully acknowledge the assistance of Tim Allen and Sean Hollister from the Big XII and Hud Jordan from the NC State Football Video Department.
Author information
Authors and Affiliations
Corresponding author
Appendices
Appendix 1
Explanation of Signum Function Used for Quaternion Setup.

Accounting for the signum functions described above, the following plot depicts the “effective” aerodynamic coefficients over a full rotation of the football about its transverse axis with respect to a fixed velocity vector as depicted above. Positive lift is defined upward, positive drag is defined to the left, positive yaw force is defined out of the page, and positive moment is defined about an axis aligned out of the page. It is evident that the numerical formulation is continuous and able to represent the aerodynamic response over the full rotation.

Appendix 2
Generation of the initial state vector requires an initial transformation matrix, \( ^{B} \left[ C \right]_{0}^{O} \). For the simulations in this investigation, alignment of the coordinate systems requires two simple rotations to align the two systems. Starting with the two systems aligned, the first is a rotation of +90° about \( \vec{j}_{B} \). Secondly, for tilted simulations, a rotation about \( \vec{k}_{B} \) of the specified tilt angle, denoted \( \theta_{tilt} \), is necessary. Therefore,
The quaternion describing the initial orientation of the ball is obtained from the following:
Initial velocity and angular velocity components in the B-frame are obtained by transforming the vectors defined in the O-frame by multiplying the transformation matrix (Eq. 25) and a row vector of velocity or angular velocity components in the O-frame.
Rights and permissions
About this article
Cite this article
Lee, W.M., Mazzoleni, A.P. & Zikry, M.A. Aerodynamic effects on the accuracy of an end-over-end kick of an American football. Sports Eng 16, 99–113 (2013). https://doi.org/10.1007/s12283-012-0110-y
Published:
Issue Date:
DOI: https://doi.org/10.1007/s12283-012-0110-y