
Abstract
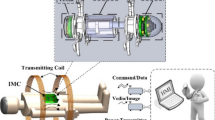
The existing endoscope brings too much discomfort to patients because its slim and rigid rod is difficult to pass through α, γ loop of the human intestine. A robotic endoscope, as a novel solution, is expected to replace the current endoscope in clinic. A microrobotic endoscope based on wireless power supply was developed in this paper. This robot is mainly composed of a locomotion mechanism, a wireless power supply subsystem, and a communication subsystem. The locomotion mechanism is composed of three liner-driving cells connected with each other through a two-freedom universal joint. The wireless power supply subsystem is composed of a resonance transmit coil to transmit an alternating magnetic field, and a secondary coil to receive the power. Wireless communication system could transmit the image to the monitor, or send the control commands to the robot. The whole robot was packaged in the waterproof bellows. Activating the three driving cells under some rhythm, the robot could creep forward or backward as a worm. A mathematic model is built to express the energy coupling efficiency. Some experiments are performed to test the efficiency and the capability of energy transferring. The results show the wireless energy supply has enough power capacity. The velocity and the navigation ability in a pig intestine were measured in in vitro experiments. The results demonstrated this robot can navigate the intestine easily. In general, the wireless power supply and the wireless communication remove the need of a connecting wire and improve the motion flexibility. Meanwhile, the presented locomotion mechanism and principle have a high reliability and a good adaptability to the in vitro intestine. This research has laid a good foundation for the real application of the robotic endoscope in the future.


















Similar content being viewed by others


References
Accoto, D., P. Castrataro, and P. Dario. Biomechanical analysis of Oligochaeta crawling. J. Theoret. Biol. 230:49–55, 2004. doi:10.1016/j.jtbi.2004.03.025
Carrozza, M. C., L. Lenciomi, and B. Magnani. A micro robot for colonoscopy. In: Seventh International Symposium on Micro Machine and Human Science, Nagoya, Japan, 1996, pp. 223–228
Dario, P., M. C. Carrozza, E. Guglielmelli, C. Laschi, A. Menciassi, and F. Vecchi. Robotics as a future and emerging technology: biomimetics, cybernetics, and neuro-robotics in European projects. IEEE Robot. Automat. Mag. 12:29–45, 2005
Fang, D. Electrician Reckoner. Jinan, China: Shandong Science and Technology Press, 1994
Iddan G., Glukhovsky A., Swain P. (2000) Wireless capsule endoscopy. Nature 405(25): 417. doi:10.1038/35013140
International Commission on Non-Ionizing Radiation Protection, Guidelines for limiting exposure to time-varying electric, magnetic, and electromagnetic fields (up to 300 GHz). Oxford, UK: Oxford University Press, 1998
Joung, G. B., and B. H. Cho. An energy transmission system for an artificial heart using leakage inductance compensation of transcutaneous transformer. IEEE Trans. Power Electr., 13(6):1013–1022,1998
B. Kim, M.G. Lee, Y.P. Lee, Y.I. Kim, G. Lee 2006 An earthworm like micro robot using shape memory alloy actuator. Sens. Actuat. A, 125, 429–437. doi:10.1016/j.sna.2005.05.004
Kim, B., S.-H. Park, Y. J. Chang, et al. An earthworm-like locomotive mechanism for capsule endoscopes. In: IEEE International Conference on Robotics and Automation. Barcelona: IEEE, 2005, pp. 1205–1211
Kraus, J. D., and D. A. Fleisch. Electromagnetics with Applications. Beijing, China: Tsinghua University Press, McGraw-Hill, 105 pp
Ma, G. Research on a Miniature Robot and Wireless Powering Techniques for Intestine Inspection. Shanghai, China: Shanghai Jiaotong University, pp. 89–91, 2008
Menciassi, A., and P. Dario. Bio-inspired solutions for locomotion in the gastrointestinal tract: background and perspectives. Phil. Trans. R. Soc. Lond. A 5:1–12, 2003
Menciassi, A., S. Gorini, A. Moglia, et al. Clamping tools of a capsule for monitoring the gastro intestinal tract. In: IEEE International Conference on Robotics and Automation, Barcelona, Spain, 2005, pp. 1309–1314
Menciassi, A., S. Gorini, G. Pernorio, and P. Dario. A SMA actuated artificial earthworm. In: IEEE International Conference on Robotics and Automation, New Orleans, LA, 2004, pp. 3282–3287
Ozeki, T., T. Chinzei, and Y. Abe. A study on an energy supply method for a transcutaneous energy transmission system. Artif. Organs. 27(1):68–72, 2000
F. Sato, T. Nomoto, G. Kano 2004 A new contactless power-signal transmission device for implanted functional electrical stimulation (FES). IEEE Trans. Mag., 40(4), 2964–2966. doi:10.1109/TMAG.2004.830416
Wang, G., W. Liu, and R. Bashirullah. A closed loop transcutaneous power transfer system for implantable devices with enhanced stability. In: ISCAS, 2004, pp. 17–20
K. Wang, G. Yan 2007 Micro robot prototype for colonoscopy and in-vitro experiment. J. Med. Eng. Technol., 31(1), 24–28. doi:10.1080/03091900500233759
Wang, K., G. Yan, and J. Zuo. Active micro robot colonoscopy’s navigation based on vision. High Technol. Lett. 16:372–376, 2006
Yan, G.-Z., Q.-H. Lu, G. Q. Ding, et al. The prototype of a piezoelectric medical micro robot. In: International Symposium on Micromechatronics and Human Science. Nagoya: IEEE, 2002, pp. 73–78
Acknowledgment
The authors would like to make a grateful acknowledgement to the financial support from the High Technology Research and Development Program of China (2004AA404013 and 2008AA04Z201).
Author information
Authors and Affiliations
Corresponding author
Rights and permissions
About this article
Cite this article
Wang, K., Yan, G., Ma, G. et al. An Earthworm-Like Robotic Endoscope System for Human Intestine: Design, Analysis, and Experiment. Ann Biomed Eng 37, 210–221 (2009). https://doi.org/10.1007/s10439-008-9597-6
Received:
Accepted:
Published:
Issue Date:
DOI: https://doi.org/10.1007/s10439-008-9597-6