
Abstract
The ability to detect an error in performance is critical to ongoing and future goal-directed behaviour. Diminished awareness of errors has been associated with a loss of insight and poor functional recovery in several clinical disorders (e.g., attention-deficit/hyperactivity disorder, addiction, schizophrenia). Despite the clear imperative to understand and remediate such deficits, error awareness and its instantiation in corrective behaviour remains to be fully elucidated. The present study investigated the relationship between error awareness and future performance in order to determine whether conscious recognition of errors facilitates adaptive behaviour. Fifty-one healthy participants completed a motor Go/No-Go error awareness task that afforded the opportunity to learn from errors. A mixed-effects model was specified wherein awareness of an error was used to predict inhibitory performance on the following No-Go trial. The model revealed a significant predictive effect of error awareness on future performance, such that aware errors were more frequently followed by correct inhibitory performance. Notably, improvement in performance accuracy was not due to a temporary increase in conservatism of responding, but appeared to be a context-specific adaptation. These results highlight the adaptive role of error awareness and the relationship between error awareness and learning from errors that has the potential to contribute to clinical symptomatology.
Similar content being viewed by others

Introduction
The processing of errors serves a key role in performance monitoring as it allows behavioural modifications to be implemented in order to reach a desired goal (Hoffmann & Beste, 2015). Within error processing it is possible to delineate between errors made with and without conscious recognition. While error processing can occur in the absence of awareness, reduced error awareness may limit the opportunity for remedial action. Importantly, research has implicated deficient error awareness in multiple neurological and psychiatric conditions (Charles et al., 2017; O’Connell et al., 2009; Rubia et al., 2005). Critically, impaired error awareness in these conditions has been associated with inattention, lack of insight and perseverative behaviour (Mintz et al., 2004; Moeller & Goldstein, 2014), which are subsequently predictors of poor treatment outcome and functional recovery.
Despite the clear imperative to understand error awareness, there remain several questions regarding its instantiation in adaptive behaviour. To examine the influence of error awareness on post-error adjustments, research has focused predominantly on post-error slowing. Although findings of an association between error awareness and increased post-error reaction time have been used to advocate an adaptive role of error awareness in performance monitoring (Cohen et al., 2009; Endrass et al., 2012; Hoonakker et al., 2016; Nieuwenhuis et al., 2001; Wessel et al., 2011), there are several studies that have reported no such relationship (Harsay et al., 2018; Hester et al., 2005; Klein et al., 2007; van Gaal et al., 2009). Further, while adaptive accounts of post-error slowing have dominated the literature, mixed findings surrounding the functional significance of post-error slowing suggest that it may not necessarily index a sustained change in performance strategy (Notebaert et al., 2009; van Gaal et al., 2012). Taken together, there appears the need for an alternative measure of delayed post-error adjustments.
The relationship between error awareness and post-error accuracy may offer greater insight into the role of error awareness in sustained adaptive behaviour. In a response conflict task, Di Gregorio et al. (2016) found no overall increase in post-error accuracy nor a difference in post-error accuracy between aware and unaware errors. Similarly, Endrass et al. (2012) administered an anti-saccade task and found no effect of error awareness on post-error accuracy. Using the same task, however, Klein et al. (2007) found error rate to be lower following aware errors. Several other studies employing anti-saccade tasks have found unaware errors to be corrected more frequently and with greater speed than aware errors (Endrass et al., 2007; Harsay et al., 2018; Harsay et al., 2012; Nieuwenhuis et al., 2001). Anti-saccade tasks require participants to focus on a central target and generate an immediate eye movement away from an abruptly appearing peripheral target (to the opposite side of the screen). It is worth noting that correction in this task is classified as the redirection of eye gaze to the correct side of the screen within the given trial. The limitation of this work is that it does not relate error awareness to delayed, stimulus-specific alterations in post-error performance as there is a lack of contingency between errors and future performance. That is, the tasks do not afford individuals the opportunity to learn from errors and adaptively alter their behaviour when they encounter a situation that was previously failed (Steinhauser & Yeung, 2010). Thus, it is difficult to ascertain whether poor error awareness compromises the ability to learn from errors, which in turn results in a decline in performance accuracy. Tasks that assess error awareness while also incentivising learning from errors may better inform our understanding of the link between error awareness and remedial actions.
The current study employed a motor Go/No-Go response inhibition task in which participants make commission errors that they are aware or unaware of. Importantly, the task allowed for error awareness to be appropriately linked to adaptive behaviour (i.e., learning from errors). To afford participants the opportunity to intently display remedial action, performance in this task was largely contingent on errors. That is, inhibition performance influenced the sequence of No-Go trials such that there was a high probability that an erroneous No-Go trial was succeeded by a No-Go trial that presented the same No-Go stimulus that was failed. In this way, the task motivated participants to correct their commission errors on a subsequent post-error No-Go trial. It was hypothesised that under these context-specific conditions, where the same No-Go stimulus is presented, error awareness will facilitate adaptation following errors and thus predict correct inhibitory performance on the future No-Go trial.
Materials and methods
Participants
Fifty-one participants (female = 80%; Mage= 20.80 years, SD = 2.24) were recruited from The University of Melbourne campus and experimenter networks. To determine the sample size, a power analysis by simulation was undertaken in R (R Core Team, 2017) using the simr package (Green & MacLeod, 2016). The power analysis required a generalised linear model fit using the lme4 package (Bates et al., 2015). The model used to test the main hypothesis was specified using pilot data and the effect size was set to .40 (Brysbaert & Stevens, 2018). A minimum sample size of 41 was required to achieve 80% power. Assuming similar inhibition performance and awareness rates as reported in previous studies (Hester et al., 2005), 51 participants should provide the recommended number of observations for a mixed-effect model (Brysbaert & Stevens, 2018). All participants provided written informed consent and were reimbursed for participation. The study received approval by The University of Melbourne’s Human Research Ethics Committee for meeting the standards prescribed by the National Health and Medical Research Council.
Behavioural task
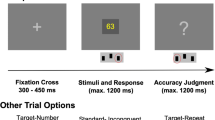
The Learning from Inhibition Errors task is a motor Go/No-Go response inhibition paradigm adapted from Hester et al. (2009). The task was programmed and delivered using E-Prime software (version 1.1, Psychology Software Tools). Each task trial presented a random letter from the English alphabet (Fig. 1). Participants were required to make a left button press for each letter in the sequence (Go trials), unless the letter was presented consecutively (No-Go trials). On such trials, participants were required to withhold their response. To indicate error awareness, participants were trained to forego making a standard ‘Go’ response on the Go trial following an incorrect No-Go response (commission error), and instead execute a right button press (Fig. 2).

Learning from inhibition errors task. The task presented a serial stream of letters. The figure presents an example of a No-Go trial (the repetition of the letter ‘C’) followed by the same stimulus on the following No-Go trial (consecutive repetition of the letter ‘C’). This sequence will only occur when participants have not inhibited their response on the first No-Go trial

Classification of No-Go events. Participants responded to each letter using a left button press (‘1’) and withheld their response whenever a letter was presented consecutively (i.e., No-Go trial). To indicate error awareness, participants were required to forgo making a standard ‘Go’ response and to instead execute a right button press (‘2’) on the trial following the commission error. No-Go trials that presented the same stimulus as the previous No-Go trial were classified as ‘same-stimulus’ No-Go trials. Those that presented a different stimulus were classified as ‘different-stimulus’ No-Go trials. No-Go trials were categorised based on performance (errors shaded red, correct stops shaded green). For 75% of first-presentation No-Go errors, the next No-Go trial was a same-stimulus No-Go trial (A, B). For the remaining 25% of first-presentation No-Go errors, the next No-Go trial was a different-stimulus No-Go trial (C). The No-Go trial following a correct stop (A, C) or same-stimulus error (B) was always a different-stimulus No-Go trial
Participants were instructed that the trial sequence was influenced by their performance on No-Go trials. A correct No-Go response guaranteed that the next No-Go trial presented a different (random) letter stimulus. For 75% of incorrect No-Go responses, the next No-Go trial presented the same letter stimulus (i.e., a context-specific condition). The task ensured that the letter would not appear as a Go trial between the first-presentation error and the following No-Go trial. This task design incentivised participants to encode the letter during an error as it enabled them to predict the highly probable appearance of the next No-Go trial and therefore avoid making a consecutive erroneous response. For 25% of incorrect No-Go responses, the next No-Go trial instead presented a different letter of the alphabet. This allowed us to compare the effect of error awareness on future performance when the No-Go stimulus did not provide predictive information. If a participant failed to withhold their response on a second consecutive No-Go trial, the No-Go trial following the second error presented a different letter of the alphabet. This ensured that a maximum of two consecutive No-Go trials would present the same letter. Participants were instructed to respond as quickly and as accurately as possible.
Participants were initially administered a practice version of the task comprising 120 trials (110 Go trials, 10 No-Go trials). This ensured participants were familiar with the task instructions and could appropriately indicate error awareness. The full task comprised five blocks of 265 trials (225 Go trials, 40 No-Go trials). All stimuli were presented for 700 ms followed by a 600-ms inter-stimulus interval. Stimulus durations account for the time required for errors to reach conscious awareness (Rabbitt, 2002). No-Go trials were distributed pseudo-randomly throughout the serial presentation of Go trials. The number of Go trials separating No-Go trials ranged between four and 12 (M = 6.60; SD = 1.61).
No-Go trials were classified according to whether they presented the same letter stimulus as the previous No-Go trial (Fig. 2). No-Go trials that presented the same stimulus as the previous No-Go trial were classified as ‘same-stimulus’ No-Go trials (i.e., a context-specific condition). Those that presented a different stimulus were classified as ‘different-stimulus’ No-Go trials. Based on participant performance, No-Go trial events were classified into correct responses, unaware and aware errors. Correct No-Go responses (stops) were those in which the participant successfully withheld a response, while incorrect No-Go responses (commission errors) were those in which the participant did not inhibit a response. The second in a pair of consecutive No-Go errors (of which the second No-Go trial was a same-stimulus trial) was classified as a same-stimulus No-Go error. If the participant responded with a left button press on the No-Go trial and again on the following Go trial, the commission error was classed as unaware. Any deviation from this was classified as an aware error.
Data analysis
Data analysis was undertaken using the programming language R (R Core Team, 2017). Assumptions were tested, and non-parametric analyses were computed under violations of normality. Where required, reaction time was log-transformed prior to analyses (Brysbaert & Stevens, 2018). Greenhouse-Geisser-adjusted degrees of freedom and p-values are reported under violations of sphericity. Post hoc tests were undertaken using Tukey’s method for multiple comparisons. P-values were otherwise adjusted using Holm procedures. Alpha was set to .05 for all analyses. All data and R codes required for the current results have been made publicly available online at the Open Science Framework (https://osf.io/8b6y2/).
Effect of error awareness on future performance
To assess the adaptive function of error awareness, awareness of a given erroneous No-Go trial was used to predict inhibition performance on the subsequent No-Go trial. The resulting data were binary (where 0 = unaware error, and 1 = aware error, and 0 = incorrect No-Go response, and 1 = correct No-Go response) and had a multilevel structure such that erroneous trials were nested within blocks that were nested within individuals. First-presentation errors that were followed by a different-stimulus No-Go trial were analysed separately. The purpose of this second analysis was to compare post-error performance when the No-Go stimulus did not provide predictive information.
A mixed-effects logistic model was computed using the ‘glmer’ function from the lme4 package (Bates et al., 2015). A mixed-effects logistic model predicts the outcome of a binary dependent variable in terms of log odds (i.e., logits) that are modelled as a linear combination of independent variables (i.e., fixed effects) and one or more random effects. Error awareness served as the fixed effect used to predict inhibition performance. Consistent with Wiley and Wiley (2019, pp. 553-586), a binominal distribution with a logit function was specified, and subject and block were included as nested random effects. Error number was not included as a nested random effect due to near zero variance. P-values were estimated using the lmerTest package (Kuznetsova et al., 2012) based on the Satterthwaite approximation for degrees of freedom. Odds ratios were calculated for the fixed effects and bootstrap confidence intervals were derived using parametric bootstrapping.
Post-error reaction time adjustments
The error awareness task is not optimised to analyse response-speed adjustments following errors as participants are required to execute an awareness button press on the trial immediately succeeding the error. Switching to the awareness button typically results in abnormally fast reaction times on the Go trials proceeding the error. Response speed adjustments following erroneous trials were therefore determined by calculating the difference in reaction time for each Go trial proceeding the No-Go by at least three trials and the Go trial immediately preceding the No-Go (a subtraction of the post-error Go reaction time from the pre-error Go reaction time). Erroneous No-Go trials (and the proceeding post-error trials) that followed pre-No-Go trials on which the participant did not make a response were excluded from analysis.
A mixed-effects model was estimated using the ‘mixed’ function from the afex package (Singmann et al., 2020). The model was specified to compare post-error reaction time adjustments across post-error trials and error types, and included two fixed effects and their interactions: post-error trial number (3–6) and error type (aware and unaware errors followed by a same-stimulus No-Go error, and aware and unaware errors followed by a same-stimulus No-Go stop). Subject and error number were included as random nested effects. Block was not included as a nested random effect due to near zero variance. Satterthwaite approximation for degrees of freedom was used to obtain p-values as it provides the best control for Type I errors under the restricted maximum likelihood estimation and is less computationally intensive than the Kenward-Roger approximation (Singmann & Kellen, 2019). Random slopes were not included in the model as they did not improve model fit. Post hoc tests were undertaken using the emmeans package (Russell et al., 2020). Marginal means and standard errors were computed using the ‘emmeans’ function and pairwise comparisons were conducted using the ‘pairs’ function.
Results
Performance indices are summarised in Table 1. Consistent with previous studies employing the error awareness task (Hester et al., 2005), no association was found between awareness of errors and overall inhibition performance, rs = .13, p = .351. Further, the difference in reaction time between correct Go trials and aware and unaware commission errors failed to reached significance, F(1.35, 60.92) = 3.65, p = .050, ηp2 = .07.
Response inhibition was found to differ for same-stimulus and different-stimulus No-Go trials, F(1.42, 69.62) = 41.47, p < .0001, ηp2 = .20. Post hoc tests indicated that response inhibition performance for No-Go trials following a commission error was significantly better for same-stimulus trials (M = 75.26%, SD = 21.03) than different-stimulus trials (refer to Fig. 2 for classification of No-Go events) (M = 48.92%, SD = 26.49), t(98) = 8.90, p < .0001. No-Go trial performance following a successful stop (post-correct inhibition performance) (M = 59.45%, SD = 19.76), was significantly poorer than same-stimulus performance, t(98) = 6.11, p < .0001. Post-correct inhibition performance was, however, significantly better than post-error different-stimulus performance, t(98) = 2.79, p = .017.
Results of the mixed-effects logistic regressions are summarised in Table 2. Under context-specific conditions, whereby a No-Go error was followed by a same-stimulus No-Go trial, there was a significant predictive effect of error awareness on subsequent No-Go performance, β = 0.50, 95% CI [0.13, 0.83], OR = 1.64, 95% CI [1.14, 2.30]. That is, correct inhibitions more frequently followed an aware error (correction rate: Maware = 78%, SD = 27; Munaware = 65%, SD = 38). When a first-presentation error was followed by a different-stimulus No-Go trial and thus did not afford a learning opportunity, there was no predictive effect of awareness on performance, β = 0.06, 95% CI [-0.46, 0.60], OR = 1.06, 95% CI [0.63, 1.90] (correction rate: Maware = 46%, SD = 43; Munaware = 41%, SD = 44).
Errors were further examined to identify other behavioural indices associated with adaptive behaviour. Response speed did not differ between errors that were followed by a same-stimulus No-Go stop (Maware = 348.16 ms, SD = 150.30; Munaware = 374.44 ms, SD = 121.46) and errors that were followed by a same-stimulus No-Go error (Maware = 330.62 ms, SD = 92.07; Munaware = 327.73 ms, SD = 107.15), F(2.30, 55.20) = 0.19, p = .858, ηp2 = .008. Correcting an error was not determined by the interval between consecutive No-Go trials. That is, there was no difference in intervals between No-Go errors followed by a No-Go error (Maware = 6.72 Go trials, SD = 0.73; Munaware = 6.66 Go trials, SD = 0.81) and No-Go errors followed by a No-Go stop (Maware = 6.52 Go trials, SD = 0.57; Munaware = 6.45 Go trials, SD = 1.05), F(3, 161) = 0.87 p = .457, ηp2 = .02.
The Go trial immediately preceding a same-stimulus No-Go trial was expected to act as a cue to participants by alerting them to the upcoming No-Go trial. The pre-No-Go reaction time before a same-stimulus stop (M = 362.13 ms, SD = 89.93) was significantly slower than that for a same-stimulus error (M = 304.13 ms, SD = 78.19), t(48) = 4.37, p = .0002, d = .62. Similarly, when the No-Go trial appeared unpredictably (e.g., after 25% of first-presentation errors or after a same-stimulus error), pre-No-Go reaction time before a stop (M = 372.26 ms, SD = 73.51) was significantly slower than before an error (M = 319.04 ms, SD = 60.02), t(50) = 5.63, p < .0001, d = .79. There was no difference in pre-No-Go Go reaction time before a same-stimulus stop and different-stimulus stop, t(50) = -1.64, p = .213, d = .23, nor was there a difference in pre-No-Go reaction time before an aware (M = 321.84 ms, SD = 77.95) and an unaware error (M = 318.29 ms, SD = 83.55), t(45) = 1.03, p = .308, d = .15. Further, error awareness did not predict reaction time on the subsequent pre-No-Go, β = -4.11, 95% CI [-23.78, 15.56].
Neither No-Go errors followed by a No-Go stop or No-Go errors followed by a No-Go error showed post-error slowing until at least five trials after the No-Go error (Fig. 3). The mixed effects model revealed a main effect of post-error trial on reaction time adjustments, F(3, 3941.86) = 25.53, p < .0001. Further, a significant interaction between error type and post-error trial was found, F(9, 3938.08) = 2.12, p = .030. There was, however, no main effect of error type on post-error speed, F(3, 878.05) = 1.72, p = .160. Pairwise comparisons between post-error trial numbers revealed a linear increase in post-No-Go reaction time as temporal distance from the No-Go increased (Fig. 3). A significant difference (ps < .002) between each pairwise comparison was found with the exception of post-error trials 4 and 5, t(3838) = -2.08, p = .159, and post-error trials 5 and 6, t(3795) = -1.81, p = .267. The interaction between error type and post-error trial number revealed a difference at post-error trial 3 between unaware errors followed by a No-Go error and aware errors followed by a No-Go error, t(1265) = 3.41, p = .004, and aware errors followed by a No-Go stop, t(798) = 3.58, p = .002, with greater speeding following aware errors. Similar results were found for post-error trial 4, with significant differences in reaction time between unaware errors followed by a No-Go error and aware errors followed by a No-Go error, t(1689) = 2.91, p = .019, and aware errors followed by a No-Go stop, t(1084) = 3.06, p = .012. No difference between error types was found at any other post-error trial number (ps > .271).

Go trial reaction time following first-presentation errors. Mean (± SE) reaction times are presented for the Go trial preceding a No-Go error (-1), the failed No-Go trial (0), and the Go trials that followed the error. While the number of Go trials separating No-Go trials ranged from four to 12, the range of post-error trials was restricted to six trials to maximise reliability of trial response times. Post-error trials exceeding six were excluded from analysis due to low event frequencies
Discussion
The present study aimed to determine the influence of error awareness on adaptive post-error behavioural adjustments. By assessing error awareness in a task where performance was contingent on past errors, we were able to investigate the role of error awareness on corrective behaviour. The present findings indicate that adaptive behaviour, in the form of avoiding consecutive response inhibition errors, can be predicted by error awareness.
Few studies have examined the influence of error awareness on behavioural post-error adjustments. While Klein et al. (2007) found a reduced error rate after aware errors, most studies assessing the relationship between awareness and post-error accuracy have found no improvement in performance accuracy following aware errors (Endrass et al., 2012; Harsay et al., 2018). These studies have each employed an anti-saccade task where trials are independent of each other. Thus, awareness of an error on one trial does not necessarily aid performance on the following trial. It is likely that the influence of error awareness on subsequent performance depends on task demands. Specifically, the opportunity to learn from errors may be central to improving future performance. While immediate error correction is often observed in anti-saccade tasks – characterised by the redirection of eye gaze to the correct side of the screen within the given trial – this most frequently occurs for unaware errors (Endrass et al., 2007; Harsay et al., 2018; Harsay et al., 2012; Nieuwenhuis et al., 2001). It could be argued that these are not unaware errors per se, but anti-saccades preceded by incorrect prosaccades. Thus, correction in this case is unlikely to reflect adaptive alterations in performance as a result of error-processing mechanisms. Categorising No-Go trials as a ‘same’ or ‘different’ stimulus to the previous No-Go trial allowed us to determine under what learning conditions awareness affords adaptive behaviour. Here, we have demonstrated that aware errors are more likely to be corrected than unaware errors under a delayed, stimulus-specific condition. That is, awareness of errors assists in adaptive behaviour only on subsequent trials when the same No-Go stimulus was presented as the previous No-Go trial on which they made an error. It is likely that awareness facilitated successful encoding of the letter stimulus, which allowed participants to predict the presentation of the next No-Go trial, thereby avoiding a commission error. Unlike first-presentation errors that were followed a same-stimulus No-Go trial, first-presentation errors that were followed by a different-stimulus No-Go trial offered no learning opportunity. Under these conditions, error awareness afforded no benefit and therefore was not predictive of performance on the following No-Go trial.
Improvements in performance were not facilitated by post-error reductions in reaction time. While the literature on post-error slowing is mixed, researchers have argued that post-error slowing is an index of adaptive behaviour insofar as it reflects heightened response caution that aims to improve post-error performance (Dutilh et al., 2012). Consistent with previous studies employing a motor Go/No-Go error awareness task (Hester et al., 2005), however, the current study found post-error speeding following aware errors. It is worth noting that the task is not optimised to analyse response speed adjustments following errors. Indeed, post-error slowing is not typically reported in studies employing the motor Go/No-Go error awareness task. In such tasks, participants are required to execute an awareness response on the trial immediately following an error and therefore do not need to process the post-error stimulus. To circumvent this issue, we excluded the shift to the error awareness button and back to the typical ‘Go’ response by omitting post-error trials 1 and 2 from analysis. While there was a general trend for slower reaction time with an increase in temporal distance from the error, significant slowing (relative to the pre-No-Go trial) was not demonstrated. It is likely that the error signalling interfered with trial-by-trialpost-error reaction time adjustments. It should be noted that greater speeding was found for aware errors followed by a No-Go stop compared to unaware errors (followed by either a No-Go error or stop), however this was only found at post-error trials 3 and 4. Such results indicate that post-error changes in response speed were not predictive of correction, which reinforces suppositions that post-error reaction time does not adequately index adaptive behaviour. Indeed, Klein et al. (2007) found a reduced error rate following aware errors in the absence of significant post-error slowing. It should also be considered that the current task had a lower percentage of No-Go trials than commonly employed response inhibition tasks (15% for the current version vs. 25% for flanker and Stroop tasks). Thus, there is a reduced likelihood that another No-Go trial will appear soon after an error which subsequently curtails the potential adaptive benefits of post-error slowing.
Thus far, adaptive behaviour appears to depend largely on task demands (Danielmeier & Ullsperger, 2011; Jentzsch & Dudschig, 2009). Performance measures were therefore further examined to identify behavioural indices that may be associated with adaptive behaviour. The awareness benefit did not appear to be confounded by post-error duration differences, as there was no difference in trial separation between aware and unaware errors, and their respective subsequent No-Go trial. This suggests that aware error correction was not aided by a shorter memory delay. Further, response speed did not differ between aware and unaware errors followed by either a No-Go stop or a No-Go error. While pre-No-Go reaction time before a successful stop was significantly slower than for an error (both for initial and repeat errors), there was no difference in pre-No-Go reaction time before a same stop and a different stop. This converges with our finding that error awareness did not predict reaction time on the subsequent pre-No-Go and furthermore lends support to the dissociation between error awareness and reaction time adjustments (Danielmeier & Ullsperger, 2011). While slower reaction time improved accuracy in this task, the absence of a difference in reaction time preceding same stimulus and different stimulus No-Go trials suggests that changes in reaction time did not reflect context-dependent, adaptive alterations in performance.
The current findings have potential clinical implications. Several clinical groups with impaired error awareness typically display perseverative behaviour and reduced insight into their condition (Hester et al., 2007; Mintz et al., 2004). These symptoms are often interpreted to be a consequence of impaired performance monitoring (Moeller & Goldstein, 2014). Impaired error awareness, in particular, may explain why these patients are less sensitive to the outcome of their actions and are therefore likely to repeat maladaptive behaviours. Findings from drug-dependent cohorts, for example, prompt the question of whether the error awareness deficit contributes to the cognitive control dysfunction that is considered critical to the maintenance of drug use (Goldstein et al., 2009). That is, impaired learning from errors and post-error adaptation may underlie perseverative behaviour. The lack of contingency between errors and future performance in previous studies has restricted the exploration of the relationship between diminished error awareness and subsequent cognitive control dysfunction. Employing the current task to examine the influence of error awareness on post-error adaptation in a population previously characterised by poor error awareness may bridge gaps in theories on the mechanistic role of error awareness in clinical disorders.
As a final consideration, it should be noted that there were substantially fewer first-presentation errors followed by a different-stimulus No-Go trial than same-stimulus No-Go trials. As highlighted by Danielmeier and Ullsperger (2011), too few errors can result in ceiling or floor effects in post-error accuracy measures. While we found that awareness was not predictive of performance on the next No-Go trial if the stimulus letter was different, it is unclear whether the strong relationship between error stimulus and the following No-Go trial stimulus biased this evaluation. Further exploration is required to confirm whether the adaptive benefits of awareness are context-specific, as is suggested here. Manipulating the learning value across a number of task blocks will provide greater clarification of whether the effect observed is indeed driven by the predictive value of an error.
In sum, the current findings provide evidence of the adaptive role of error awareness in performance monitoring. By employing a task that provided the opportunity to learn from errors, we were able to demonstrate that error awareness improves performance by facilitating corrective behaviour. Importantly, improvement in performance was not the result of a transient increase in conservatism of responding, but appeared to be a context-specific adaptation. That is, awareness facilitated correction only when participants encountered a situation that was previously failed. These results may assist in explaining previous findings of an increased propensity for maladaptive behaviours in clinical conditions underpinned by diminished error awareness.
Data availability
The data and materials for the experiment reported here are available at https://osf.io/8b6y2/.
References
Bates, D., Maechler, M., Bolker, B., & Walker, S. (2015). Fitting linear mixed-effects models using lme4. Journal of Statistical Software, 67(1), 1-48. https://doi.org/10.18637/jss.v067.i01
Brysbaert, M., & Stevens, M. (2018). Power Analysis and Effect Size in Mixed Effects Models: A Tutorial. Journal of Cognition, 1(1), 1-20. https://doi.org/10.5334/joc.10
Charles, L., Gaillard, R., Amado, I., Krebs, M.-O., Bendjemaa, N., & Dehaene, S. (2017). Conscious and unconscious performance monitoring: Evidence from patients with schizophrenia. NeuroImage, 144(A), 153-163. https://doi.org/10.1016/j.neuroimage.2016.09.056
Cohen, M. X., van Gaal, S., Ridderinkhof, K. R., & Lamme, V. A. F. (2009). Unconscious Errors Enhance Prefrontal-Occipital Oscillatory Synchrony. Frontiers in Human Neuroscience, 3(54), 1-12. https://doi.org/10.3389/neuro.09.054.2009
Danielmeier, C., & Ullsperger, M. (2011). Post-Error Adjustments. Frontiers in Psychology, 2(233), 1-10. https://www.frontiersin.org/article/10.3389/fpsyg.2011.00233
Di Gregorio, F., Steinhauser, M., & Maier, M. E. (2016). Error-related brain activity and error awareness in an error classification paradigm. NeuroImage, 139, 202-210. https://doi.org/10.1016/j.neuroimage.2016.05.074
Dutilh, G., Vandekerckhove, J., Forstmann, B. U., Keuleers, E., Brysbaert, M., & Wagenmakers, E.-J. (2012). Testing theories of post-error slowing. Attention, Perception, & Psychophysics, 74(2), 454-465. https://doi.org/10.3758/s13414-011-0243-2
Endrass, T., Klawohn, J., Preuss, J., & Kathmann, N. (2012). Temporospatial dissociation of Pe subcomponents for perceived and unperceived errors. Frontiers in Human Neuroscience, 6(178), 1-10. https://doi.org/10.3389/fnhum.2012.00178
Endrass, T., Reuter, B., & Kathmann, N. (2007). ERP correlates of conscious error recognition: aware and unaware errors in an antisaccade task. European Journal of Neuroscience, 26(6), 1714-1720. https://doi.org/10.1111/j.1460-9568.2007.05785.x
Goldstein, R. Z., Craig, A. D., Bechara, A., Garavan, H., Childress, A. R., Paulus, M. P., & Volkow, N. D. (2009). The Neurocircuitry of Impaired Insight in Drug Addiction. Trends in Cognitive Sciences, 13(9), 372-380. https://doi.org/10.1016/j.tics.2009.06.004
Green, P., & MacLeod, C. J. (2016). SIMR: an R package for power analysis of generalized linear mixed models by simulation. Methods in Ecology and Evolution, 7(4), 493-498. https://doi.org/10.1111/2041-210X.12504
Harsay, H. A., Cohen, M. X., Spaan, M., Weeda, W. D., Nieuwenhuis, S., & Ridderinkhof, K. R. (2018). Error blindness and motivational significance: Shifts in networks centering on anterior insula co-vary with error awareness and pupil dilation. Behavioural Brain Research, 355, 24-35. https://doi.org/10.1016/j.bbr.2017.10.030
Harsay, H. A., Spaan, M., Wijnen, J. G., & Ridderinkhof, K. R. (2012). Error Awareness and Salience Processing in the Oddball Task: Shared Neural Mechanisms. Frontiers in Human Neuroscience, 6(246), 1-20. https://doi.org/10.3389/fnhum.2012.00246
Hester, R., Foxe, J. J., Molholm, S., Shpaner, M., & Garavan, H. (2005). Neural mechanisms involved in error processing: A comparison of errors made with and without awareness. NeuroImage, 27(3), 602-608. https://doi.org/10.1016/j.neuroimage.2005.04.035
Hester, R., Madeley, J., Murphy, K., & Mattingley, J. B. (2009). Learning from Errors: Error-Related Neural Activity Predicts Improvements in Future Inhibitory Control Performance. The Journal of Neuroscience, 29(22), 7158-7165. https://doi.org/10.1523/JNEUROSCI.4337-08.2009
Hester, R., Simões-Franklin, C., & Garavan, H. (2007). Post-Error Behavior in Active Cocaine Users: Poor Awareness of Errors in the Presence of Intact Performance Adjustments. Neuropsychopharmacology, 32, 1974-1984. https://doi.org/10.1038/sj.npp.1301326
Hoffmann, S., & Beste, C. (2015). A perspective on neural and cognitive mechanisms of error commission. Frontiers in Behavioral Neuroscience, 9(50), 1-16. https://doi.org/10.3389/fnbeh.2015.00050
Hoonakker, M., Doignon-Camus, N., & Bonnefond, A. (2016). Performance monitoring mechanisms activated before and after a response: A comparison of aware and unaware errors. Biological Psychology, 120, 53-60. https://doi.org/10.1016/j.biopsycho.2016.08.009
Jentzsch, I., & Dudschig, C. (2009). Why do we slow down after an error? Mechanisms underlying the effects of posterror slowing. The Quarterly Journal of Experimental Psychology, 62(2), 209-218. https://doi.org/10.1080/17470210802240655
Klein, T. A., Endrass, T., Kathmann, N., Neumann, J., von Cramon, D. Y., & Ullsperger, M. (2007). Neural correlates of error awareness. NeuroImage, 34(4), 1774-1781. https://doi.org/10.1016/j.neuroimage.2006.11.014
Kuznetsova, A., Brockhoff, P., & Christensen, R. (2012). Package ‘lmerTest’: Tests in linear mixed effects models [Computer software manual]. R package version 3.1-2. https://cran.r-project.org/web/packages/lmerTest/lmerTest.pdf
Mintz, A. R., Addington, J., & Addington, D. (2004). Insight in early psychosis: a 1-year follow-up. Schizophrenia Research, 67(2), 213-217. https://doi.org/10.1016/S0920-9964(03)00047-1
Moeller, S. J., & Goldstein, R. Z. (2014). Impaired self-awareness in human addiction: deficient attribution of personal relevance. Trends in Cognitive Sciences, 18(12), 635-641. https://doi.org/10.1016/j.tics.2014.09.003
Nieuwenhuis, S., Ridderinkhof, K. R., Blom, J., Band, G. P. H., & Kok, A. (2001). Error-related brain potentials are differentially related to awareness of response errors: Evidence from an antisaccade task. Psychophysiology, 38(5), 752-760. https://doi.org/10.1111/1469-8986.3850752
Notebaert, W., Houtman, F., Opstal, F. V., Gevers, W., Fias, W., & Verguts, T. (2009). Post-error slowing: An orienting account. Cognition, 111(2), 275-279. https://doi.org/10.1016/j.cognition.2009.02.002
O’Connell, R. G., Bellgrove, M. A., Dockree, P. M., Lau, A., Hester, R., Garavan, H., Fitzgerald, M., Foxe, J. J., & Robertson, I. H. (2009). The neural correlates of deficient error awareness in attention-deficit hyperactivity disorder (ADHD). Neuropsychologia, 47(4), 1149-1159. https://doi.org/10.1016/j.neuropsychologia.2009.01.011
R Core Team. (2017). R: A language and environment for statistical computing. R Foundation for Statistical Computing. https://www.R-project.org/
Rabbitt, P. (2002). Consciousness is slower than you think. The Quarterly Journal of Experimental Psychology Section A, 55(4), 1081-1092. https://doi.org/10.1080/02724980244000080
Rubia, K., Smith, A. B., Brammer, M. J., Toone, B., & Taylor, E. (2005). Abnormal Brain Activation During Inhibition and Error Detection in Medication-Naive Adolescents With ADHD. The American Journal of Psychiatry, 162(6), 1067-1075. https://doi.org/10.1176/appi.ajp.162.6.1067
Russell, L., Henrik, S., Love, J., Buerkner, P., & Herve, M. (2020). Package ‘emmeans’: Estimated Marginal Means, aka Least-Squares Means. R package version 1.4.8. https://cran.r-project.org/web/packages/emmeans/emmeans.pdf
Singmann, H., Bolker, B., Westfall, J., Aust, F., & Ben-Shachar, M. S. (2020). Package afex: Analysis of factorial experiments. R package version 0.27-2. https://cran.r-project.org/web/packages/afex/afex.pdf
Singmann, H., & Kellen, D. (2019). An introduction to mixed models for experimental psychology. In D. H. Spieler & E. Schumacher (Eds.), New Methods in Cognitive Psychology (pp. 4-31). Psychology Press.
Steinhauser, M., & Yeung, N. (2010). Decision Processes in Human Performance Monitoring. The Journal of Neuroscience, 30(46), 15643-15653. https://doi.org/10.1523/JNEUROSCI.1899-10.2010
van Gaal, S., de Lange, F. P., & Cohen, M. X. (2012). The role of consciousness in cognitive control and decision making. Frontiers in Human Neuroscience, 6(121), 1-15. https://doi.org/10.3389/fnhum.2012.00121
van Gaal, S., Ridderinkhof, K. R., van den Wildenberg, W. P. M., & Lamme, V. A. F. (2009). Dissociating Consciousness From Inhibitory Control: Evidence for Unconsciously Triggered Response Inhibition in the Stop-Signal Task Journal of Experimental Psychology: Human Perception and Performance, 35(4), 1129-1139. https://doi.org/10.1037/a0013551
Wessel, J. R., Danielmeier, C., & Ullsperger, M. (2011). Error awareness revisited: accumulation of multimodal evidence from central and autonomic nervous systems. Journal of Cognitive Neuroscience, 23(10), 3021-3036. https://doi.org/10.1162/jocn.2011.21635
Wiley, J. F., & Wiley, M. (2019). GLMMs advanced. In Advanced R Statistical Programming and Data Models: Analysis, Machine Learning and Visualization (pp. 553-586). Apress. https://doi.org/10.1007/978-1-4842-2872-2
Funding
No funding was received for conducting this study.
Author information
Authors and Affiliations
Corresponding author
Ethics declarations
Conflicts of Interest/Competing Interests
The authors declare that there are no conflicts of interest.
Ethics Approval
The study received approval by The University of Melbourne’s Human Research Ethics Committee for meeting the standards prescribed by the National Health and Medical Research Council. HREC number: 0830956.10
Consent to Participate
Informed consent was obtained from all individual participants included in the study.
Consent for Publication
Participants signed informed consent regarding publishing their data.
Code Availability
Codes for performing data analyses are available at https://osf.io/8b6y2/.
Open Practices Statement
The data and materials for the experiment reported here are available at https://osf.io/8b6y2/, and the study was not preregistered.
Additional information
Publisher’s note
Springer Nature remains neutral with regard to jurisdictional claims in published maps and institutional affiliations.
Rights and permissions
About this article

Cite this article
Dali, G., Hester, R. Adaptation following errors: Error awareness predicts future performance. Mem Cogn 50, 672–680 (2022). https://doi.org/10.3758/s13421-021-01246-2
Accepted:
Published:
Issue Date:
DOI: https://doi.org/10.3758/s13421-021-01246-2