
Abstract
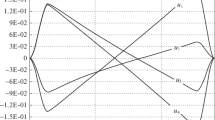
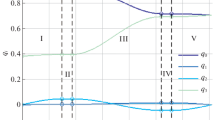
A new method for calculating space vehicle (SV) attitude controls ensuring their effective implementation by a system of collinear pairs of single-gimbal forced unrestrained gyros (gyrodynes) has been proposed. The novelty of the method consists in a virtual kinematic configuration of the gyro system, i.e., the precession of gyro units in the collinear pairs of gyrodynes is coupled in a nonmechanical manner. In addition, the angular momentum of the system as a state variable for describing the dynamics of the SV permanent rotation was used for the first time at the stage of computing controls performed nonstop by gyrodynes. In the general formulation, when the desired final state of the SV is arbitrary, the SV attitude control problem can be reduced to a sequence of permanent rotations. The performance of the method is demonstrated as applied to the calculation of program gyrodyne controls with a permanent reduction in the SV angular velocity around its center of mass with a nonzero SV angular momentum after its discharge.
Similar content being viewed by others

References
A. E. Lopez, J. W. Ratcliff, and J. R. Havill, J. Spacecraft 1 (4), 399–402 (1964).
J. W. Crenshaw, “2-speed, a single-gimbal control moment gyro attitude control system,” AIAA Guidance and Control Conference, Paper 73–895, August, 1973, pp. 1–10.
E. N. Tokar, V. P. Legostaev, M. V. Mikhailov, and V. P. Platonov, Kosm. Issled. 18 (2), 147–156 (1980).
H. Kurokawa, J. Guidance Control Dyn. 30 (5), 1331–1340 (2007).
G. K. Suslov, Theoretical Mechanics (Gostekhteorizdat, Leningrad, 1946).
I. V. Bychkov, B. B. Belyaev, E. I. Druzhinin, Yu. I. Ogorodnikov, and A. I. Ulyashin, “On kinematic configuring of power gyro systems,” The 22nd St. Petersburg International Conference on Integrated Navigation Systems (St. Petersburg, 2015), pp. 234–239.
E. I. Druzhinin, J. Appl. Math. Mech. 63 (5), 825–826 (1999).
Author information
Authors and Affiliations
Corresponding author
Additional information
Published in Russian in Doklady Akademii Nauk, 2017, Vol. 476, No. 1, pp. 22–25.
The article was translated by the author.
Rights and permissions
About this article

Cite this article
Druzhinin, E.I. Computation of program controls performed nonstop by gyrodynes. Dokl. Math. 96, 528–530 (2017). https://doi.org/10.1134/S1064562417050027
Received:
Published:
Issue Date:
DOI: https://doi.org/10.1134/S1064562417050027