
Abstract
The use of maritime autonomous vessels for the inland waterway (IWW) transport can revolutionise the current logistics supply chain and enable the shifting of the cargo transportation from the less efficient road and rail transport modes. However, the lack of guidelines and requirements for the operation and testing of autonomous vessels must be addressed to enable autonomous operations. This study aims to identify the gaps of the prevailing regulatory, liability and insurance frameworks and propose viable recommendations for the operation and testing of the autonomous IWW vessels. The theoretical case study of a next-generation autonomous ship operating in European IWW along with the required key enabling technologies is considered. A systematic methodological approach is followed focusing on the existing, transition and next-generation stages for developing autonomous vessels. The existing stage deals with classifying the identified gaps considering the categories of high, moderate or low severity, whereas the anticipated new stakeholders with associated risks in the context of autonomous vessels are analysed. The transition stage discusses recommendations to mitigate the identified gaps of the analysed existing frameworks by either developing interpretations, amending existing instruments or proposing new instruments. The proposed recommendations demonstrate a pathway towards upgrading the existing frameworks based on the identified severity levels and hence are expected to be beneficial for the policymakers whilst preparing the roadmap for the design and operation of next-generation autonomous ship (NGAS).
Similar content being viewed by others


1 Introduction
Due to their potential to enhance the maritime safety and reduce environmental impact, maritime autonomous vessels have been at the top-notch of discussions with several major industrial initiatives being pursued for their commercialisation, such as Yara Birkeland (Yara 2017) and ASKO (Smartmaritime 2020). Autonomous vessels mainly utilise artificial intelligence (AI) and machine learning (ML)–based algorithms and enhanced situational awareness technologies to facilitate their remote and autonomous operations and replace the navigators and engineers onboard (Bjorn-Morten et al. 2017). Although the development of autonomous vessels is in line with technological advancement (Heffner and Rødseth 2019), there is a possibility that the technological developments might be well ahead of current regulatory, liability and insurance frameworks. Hence, these frameworks’ improvements are needed. On the other hand, Europe has been effectively supporting the new concept of a motorway of the sea (MoS) by developing the paradigms of multimodal transport to mitigate road congestion and related pollution (Motorways of the Sea 2001). It has been expected that a new intermodal maritime-based logistics chain in Europe will shift 30% of road freight of more than 300 km to multimodal solutions by 2030, and more than 50% by 2050, compared with business as usual developments. In fact, coastal short-sea shipping and inland waterways struggle with competition from trucks in many parts of Europe and are losing relative market shares to road transport. Projects such as AUTOSHIP (AUTOSHIP 2019), AEGIS (AEGIS 2020), and MOSES (MOSES 2020) aim to speed up the transition towards a next generation of autonomous vessels in European waters.
A shift towards autonomous shipping was observed in the maritime industries at the beginning of the 2010s, captured by the moniker “Maritime 4.0” and referring to automatic decision making based on real-time data (Sullivan et al. 2020). The first completed project on autonomous vessels was MUNIN (Burmeister et al. 2014) aimed to develop and verify a concept for an autonomous vessel, which is primarily guided by automated on-board decision systems but controlled by a remote operator in a shore control station. Another project aimed to develop an autonomous cargo carrier servicing three ports in Southern Norway was the Yara Birkeland (Yara 2017). ASKO (Smartmaritime 2020) was another major industrial initiative on building commercial autonomous vessels. Auto-crossing and auto-docking have also been demonstrated in several ferry applications (Kongsberg 2020; Rolls-Royce 2018), where the developed technologies could effectively handle entire crossing between terminals, keeping humans in the loop to intervene in case of emergencies. Despite these projects and initiatives, which resulted in growing industrial interest and technological advancements, the maritime industry has yet to grasp the full advantages of autonomous shipping until several barriers are overcome. The regulatory, liability and insurance frameworks have been identified (AUTOSHIP 2019) as one of those that should be tackled with high priority.
The gaps associated with autonomous vessels have been discussed in various research projects and pertinent literature. The MUNIN project (MUNIN 2013) analysed the international and UK national regulations for a short-sea shipping (SSS) case, whereas the regulatory gaps under Danish law have been investigated by Danish Maritime Authority (DMA 2017). Comité Maritime International (CMI 2016), Fastvold (2018) and Karlis (2018) published their own findings on the present international legal frameworks. The regulatory scoping exercise (RSE) to analyse the existing regulatory instruments was organised by the International Maritime Organisation (IMO), with plans to follow up in the upcoming Maritime Safety Committee’s (MSC) meeting (IMO 2020). An overview of crucial international regulations and associated gaps was provided by Komianos (2018), whereas Henrik et al. (2020) analysed the existing regulatory framework for the application and testing of autonomous vessels in the Baltic state.
Despite these regulatory studies, the inland waterway shipping that significantly differs from the short sea and ocean-going applications has not been addressed. This difference is also reflected by the involved policymakers. For instance, regulatory frameworks for short sea and ocean-going vessels are mainly governed by IMO, whilst the regulatory frameworks for inland waterway shipping are governed by other authorities. This is also the case for European inland waterways at both regional and national levels. Erceg (2018) pointed out the lack of harmonisation of these regulations, which require further initiatives. However, only a few studies have been carried out focusing on the IWW regulatory bodies. Some EU inland waterway regulations, in the context of autonomous vessels, were analysed by Bačkalov (2020), whereas Juridisch (2019) investigated the gaps in the relevant regulations in the Netherlands for an unmanned vessel. Wa et al. (2021) analysed the safety and security regulatory framework to provide recommendations to the inland waterways’ policymakers, such as flag states, UNECE (United Nations Economic Commission for Europe) and CCNR (Central Commission for the Navigation of the Rhine), on the most important regulatory gaps required for the introduction of autonomous and unmanned vessels in inland waterway transport. Although Wa et al. (2021) highlighted the potential gaps to consider the autonomous operation of inland waterway vessels, the recommendations were left for further study. Furthermore, the gaps to tackle the issues in liability and insurance frameworks with the new stakeholders for autonomous vessels were not discussed. In this regard, civil liabilities of autonomous vessels and insurance related issues were discussed in CA&Cefor (2018) and Zhu and Xing (2020). Lee (2016) discusses the Scandinavian perspective for the autonomous vessels’ liabilities. Kim et al. (2022) emphasised the potential liabilities issues of using AI-based embedded software in autonomous vessels. Home et al. (2022) focussed on human‑centred risk assessment for a land‑based control interface for autonomous vessels, whereas Chang et al. (2021) explained its operational risk assessment.
The present study follows up the authors’ previous study (Wa et al. 2021) to add-on the unidentified gaps in liability and insurance frameworks, whilst aiming to propose viable recommendations for upgrading the regulatory, liability and insurance frameworks. A systematic methodological approach is followed focusing on the existing, transition and next-generation stages for enabling IWW autonomous operations. The existing stage considers the gaps identification in the current frameworks not allowing the autonomous vessels’ operation. The transition stage deals with proposing and implementing the recommendations considering different autonomy levels to address the gaps identified in the existing stage for allowing the operation of autonomous vessels (either new built or retrofitted) retaining the human in the loop. The next-generation stage utilises the experience gathered in transition stage and consider autonomous vessels to operate at highest autonomy level without human in the loop. The liability and insurance frameworks have also been analysed with regard to vessel owners, system suppliers, remote operators, cargo, assets, new technologies, criminal offences, cyber risks, and operations anticipating the growth of autonomous shipping. This study focuses up to the transition stage where expert knowledge is always required. Therefore, the amendments for the next-generation stage without expecting a human to respond to any request to intervene (RTI) are out of the scope of this study.
The remainder of this study is structured as follows. Section 2 describes the methodological approach for regulatory, liability and insurance frameworks analysis of inland waterways and gap amendments. Section 3 provides the characteristic details of the IWW use case autonomous barge. The operation area and the vessel systems are briefly discussed in this section including the KETs for its remote and autonomous (R&A) operations, the autonomy levels for the vessel operation and the mapping of the regulatory, liability and insurance related bodies. The results including the recommendations for the gaps identified in the existing frameworks are provided in Section 4. Section 5 describes the implications of this study, whereas Section 6 summarises the key findings.
2 Methodological approach
The methodological approach for analysing the gaps in the regulatory, liability and insurance frameworks for IWW autonomous vessels and proposing recommendations to address these gaps is presented in the flowchart shown in Fig. 1. Figure 2 illustrates the overview of the regulatory, liability and insurance frameworks considered for the IWW autonomous vessel. This approach was formulated considering the anticipated autonomous vessels outlook and its alignment to the frameworks upgrade. Currently, only few projects consider new-built autonomous vessels at commercial levels (Yara 2017; Smartmaritime 2020), whereas retrofitting of two existing conventional vessels is planned in AUTOSHIP (2019). Although it is challenging to provide forecasts for the autonomous vessels outlook timelines, most studies of the pertinent literature agree that a transition phase is expected, where both autonomous and conventional vessels will operate. In addition, the regulatory, liabilities and insurance-related barriers need to be addressed prior to developing the next-generation autonomous ships’ operations. The proposed approach is systematic and can guide the policymakers to take necessary steps over the three stages of the autonomous vessels’ development. This approach is robust and generic, as it is not project, geographic area or timeline specific.

Methodological flowchart

Regulatory, liability and insurance frameworks for EU-IWW
Referring to Fig. 1, stage 1 is the existing stage, in which the autonomous vessels’ operation is not allowed due to the gaps in the existing regulatory, liability and insurance frameworks. The existing frameworks consist of several regulatory bodies. These regulatory bodies provide a number of instruments requiring specific provisions to be met for the vessels’ operation. Therefore, this stage focuses on the mapping of relevant regulatory, liability and insurance bodies and identifying the gaps in the context of autonomous vessels. The mapping and gap analysis of the regulatory bodies for IWW autonomous vessel operations were performed in Wa et al. (2021). However, the gaps in the liability and insurance frameworks were not covered in previous studies and hence are addressed herein. Apart from that, this study captured some instruments that require explicit onboard human/manual intervention to comply with the provisions and classified them highly severe, as the alternative provisions require national/regional acceptance for autonomous vessels. Some instruments require human involvement actively or passively, but not necessarily onboard presence or system upgrade with key enabling technologies (KETs). These are considered of moderate severity, as trusted advanced technology could support the alternative provisions of these instruments. The instruments that require only wording adjusting or inclusion of new/amending definitions are characterised with the least severity level. These classified severity levels will help the autonomous vessels’ operators and other stakeholders to prioritise the instruments requiring amendments whilst pursuing the autonomous vessels’ adoption.
Stage 2 focuses on the transition stage considering both the retrofitted and new-built autonomous vessels being operated by the use of remote control centres keeping the human-in-the-loop. This transition stage aims to mitigate the identified gaps and allow the uninterrupted operation of autonomous vessels in inland waterways. To address the identified gaps, this study refers to the outcomes of the regulatory scoping exercising (RSE) (IMO 2020), which was initiated by IMO to assess the degree of acceptability of autonomous vessels’ operations within the existing regulatory framework. The RSE reported four alternative ways to address the limitations of the existing regulatory instruments, which are also adopted in this study by (a) developing interpretations or equivalences as provided by the instruments, (b) amending existing instruments, (c) developing new instruments or (d) none of the above. CCNR (CCNR 2018) autonomy levels are considered herein. A list of proposals was drafted to address all the prevailing rules and regulations at regional and national levels. Key enabling technologies (KETs) were considered to support the proposed recommendations, providing an equivalent level of safety and security to manned vessels. However, humans are always kept in the loop to react whenever necessary.
Stage 3 focuses on the next-generation autonomous ships (NGASs), where shipboard systems would be self-sufficient to react to requests to intervene, and therefore, remote control centre (RCC) might not be necessary to supervise/monitor them. To reach that stage, the experience gathered throughout the transition stage is quintessential. Therefore, this stage is yet to reach and is out of the scope of this study.
To map the relevant bodies, identify the gaps and propose recommendations, a comprehensive literature review was carried out, identifying inputs required for this study. Table 1 illustrates the relevant sources that were reviewed along with the classification of the provided input for this study. The sources pertinent to the IWW transport are employed to identify either gaps, propose recommendations or both for the relevant frameworks. As KETs are expected to be mostly the same (or similar) for both IWW and SSS autonomous vessels, sources pertinent to the SSS transport are also considered and employed to formulate the recommendations in cases of emerging technologies are needed to support the alternative provisions. The regulations provided by different governing authorities are analysed to identify the gaps that would create barriers for IWW autonomous vessels operation. The draft recommendations were reviewed and revised by experts with pertinent experience, leading to the final recommendations reported in this study.
Figure 2 illustrates the authorities and regulatory bodies relevant to the operation of IWW vessels, which are considered in this study, including regional, national and classification society’s rules and regulations. The considered IWW autonomous vessel operates between smaller ports and quays along the rivers and canals in the Flemish Region. Based on the area of operation, the following three main waterway authorities were identified being responsible for the construction and maintenance of the waterways and their banks, lock, bridges and towing paths: De Vlaamse Waterweg NV (DVW), Maritieme Toegang (MT) and Maritieme Dienstverlening en Kust (MDK) (Wa et al. 2021). DVW is responsible for the inland navigation. The Flemish ports are responsible for the waterways in their territory. The Minister of Mobility and Public World is responsible for preparing a part of the law for inland waterways, whereas the Flemish Government approves the law in the form of decrees.
Flanders has adopted the European standard for establishing the technical regulations for IWW vessels (ESTRIN). This standard was developed by CESNI (Comité Européen pour l’Élaboration de Standards dans le Domaine de Navigation Intérieure), a cooperation between the CCNR (Central Commission for Navigation on the Rhine), Member States of the European Union and international organisations representatives focusing on inland navigation. The aim of CESNI is to simplify the rules and regulations for inland waterways and to share knowledge among the different members to achieve a standardised approach. CESNI can grant exceptions, which would be then valid for the whole European Union.
The following mandatory instruments related to maritime safety and security for the IWW vessels are considered: (a) Policy Regulations for the Navigation of the Rhine (RPNR), (b) European Code for Inland Waterways (CEVNI), (c) Strasbourg convention of 2012 (CLNI), (d) Strasbourg convention of 1996 (CDNI), (e) European Directives, as well as (f) Regional, National and Local regulations.
It should be noted that this study does not include all codes and standards relevant for such IWW vessels (e.g., land-based regulations for remote control centre located at shore). The details of the regulatory bodies mentioned in Fig. 2 are provided in Section 3.2. Liability and insurance frameworks are separately treated with the following objectives: (a) assessment of current liability and insurance scenarios considering the anticipated autonomous shipping growth; (b) consideration of the new stakeholders along with their associated risk; (c) identification of the distribution of liabilities among current stakeholders and required amendments in the liabilities framework; (d) analysis of the insurance framework considering the autonomous shipping landscape.
The first two objectives pertain to stage 1, whereas the last two tasks pertain to stage 2 (transition stage). This study addresses the following gaps: liabilities of shipowners, system suppliers and remote operators, liabilities for nautical faults due to algorithms/programming errors, preservation of evidence at RCC and onboard, liabilities of new technologies and liabilities under criminal law. Additionally, the insurance framework analysis includes pricing issues, recourse claims, cyber risk and seaworthiness under the existing insurance law.
3 Case vessel characteristics
This study considers the theoretical use case of an autonomous IWW vessel, which was developed based on an existing (conventional) Pallet Shuttle Barge (PSB) with capacity 20-feet wheel containers (containers with wheels on one end), and goods in big-bags. The main characteristics of this vessel are reported in Wa et al. (2021). The existing PSB operates within Belgium and the Netherlands inland waterways. This study considers the use case ship operation unmanned, within all the inland waterways of the European Union member states, as well as Switzerland, the UK and Norway. The operating limitations to this type of vessel are imposed by tidal waves level, current speed, canals depth and breadth, bridges height and lock dimensions.
To facilitate the unmanned operation of the theoretical use case autonomous vessel, several key enabling (or emerging) technologies are required. The following key enabling technologies (KETs) are needed to the IWW use case: autonomous navigation system (ANS), situational awareness (SA), remote control centre (RCC), connectivity and cyber-security system (Con/CyS) and intelligent machinery system (IMS). An overview of the vessel control system, communication system and remote control centre required of the theoretical IWW autonomous use case is shown in Fig. 3. A detailed list of the IWW vessel functions, the (sub)systems characteristics and their interconnections are provided in Bolbot et al. (2021a). These KETs and their functionalities (shown in Fig. 3) are used to support the recommend proposals herein.

Layout of the control system, connectivity system and remote control centre for the IWW theoretical use case vessel
3.1 Autonomy levels
Autonomous IWW vessels may need to employ different autonomy levels during their operation. This study considers that humans are expected to intervene during the remote and autonomous (R&A) operation of the IWW use case vessel. Table 2 provides the description of the autonomy levels 2 to 4 according to the Central Commission for the Navigation of the Rhine (CCNR) (CCNR 2018). The recommendations of this study consider the CCNR levels up to 4. CCNR autonomy level 5 focuses on fully autonomous operation without expecting humans to intervene; hence, it pertains to stage 3 and is out of this study scope.
3.2 Mapping of the regulatory bodies for IWW autonomous vessels
The mapping of the existing regulatory bodies was performed to identify gaps, based on which recommendations are provided to facilitate autonomous and unmanned operations of inland waterways vessels. These regulatory bodies provide several instruments requiring specific provisions for the operation of IWW vessels. The study considers three different types of regulatory bodies, namely European Union (EU)–based rules and regulations, regional and local rules and regulations, as well as classification rules. A mapping of the rules and regulations applicable to the IWW use case is provided in Table 3.
3.3 Mapping of the liability and insurance rules for IWW autonomous vessels
A comprehensive review of the pertinent literature (as listed in Table 1) was conducted to identify the gaps in the existing liability and insurance frameworks in the context of autonomous inland vessels. The bodies listed in Table 4 are employed to investigate the liability and insurance frameworks.
4 Results and discussion
4.1 Regulatory framework amendments for inland waterway
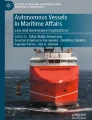
This section provides the gaps identified in the existing regulatory frameworks (Table 3) and the associated recommendations including the regulations, rules and standards (regional and national) for the design and operation of the inland waterway (IWW) use case. Figure 4 (left) shows that 32% of the identified instruments that require amendments pertain to ESTRIN, whereas 25% and 23% pertain to RPNR and BV rules, respectively. The rest 20% pertain to other regulatory bodies. Figure 4 (right) demonstrates that 75% of the identified instruments are classified to have moderate severity, whereas 17% and 8% of instruments are categorised of low and high severity, respectively. Instruments that do not need any amendment were not identified.

An insight of instrument amendments for regulatory bodies of IWW use case; left: percentages of identified instruments for amendments; right: percentages of severity levels for amendments
4.1.1 Identified gaps and proposals for European Union regulatory bodies
Recommendations/amendments or new developments have been proposed focusing on the EU rules and regulations to facilitate autonomous vessels’ operability in inland waterways. The EU regulatory bodies mapped in Table 3 are considered to address the major governing bodies for IWW use case operation. Supplementary note A summarises all the identified gaps in EU regulatory bodies and list the proposed recommendations. Justifications for the recommendations are provide in Ahmed and Theotokatos (2022).
European Directive 2016/1629/EC
The European Directive 2016/1629/EC (CESNI 2017) refers to European Standard laying down Technical Requirements for Inland Navigation vessels (ESTRIN). ESTRIN is compulsory both for European Union and CCNR countries. This standard was developed by CESNI (Comité Européen pour l’Élaboration de Standards dans le Domaine de Navigation Intérieure), a cooperation between the Member States of the European Union, the CCNR (Central Commission for Navigation on the Rhine) and representatives of international organisations focusing on inland navigation. Any exception must be granted by CESNI to become valid for the whole European Union inland waterways.
The areas where amendments or improvements are required for ESTRIN were identified by Wa et al. (2021) and included in Section A.1 of Supplementary note A. The proposals are then highlighted to address the identified gaps to facilitate the autonomous vessels’ operation in European waterways. Most of the gaps identified in ESTRIN are for vessels operating at CCNR level 3 or above. This study identified that some instruments require explicit human intervention for compliance, such as operating the doors in the aft-peak bulkhead (Ref. 3.03(5)) and opening/closing of other openings in walls, ceilings and doors of different rooms (Ref. 3.04(3)). In the context of autonomous vessels, these doors/other openings should have the provision to be operated autonomously by the vessel control system or remotely from the RCC at different autonomy levels. This could be done by establishing an effective remote monitoring system by utilising the technologically advanced sensors, high-definition surveillance cameras and communication and networks system. However, these types of instruments that require explicit human intervention would need a longer time to achieve wide acceptance and develop convincing solutions to ensure an equivalent level of safety to that of manned vessels; hence they were classified as highly severe. Other instruments pertinent to reading draught marks (Ref. 4.04), ergonomic wheelhouse arrangements (Ref. 7.01.1, 7.06.5a), ensuring unobstructed views (Ref. 7.02.1, 7.02.2), control and monitoring of main engines and steering systems (Ref. 7.04.1), stability documents and assessments (Ref. 27.01(2), 27.04, 28.03(3)) and safety rota (Ref. 30.03) were categorised of moderately severity, as the system upgrade with KETs can facilitate the compliance with such provisions. To address the ESTRIN identified gaps, this study results included (a) prescriptive requirements of installing vessel control system, connectivity and remote control centre with their associated functionalities, (b) introduce Automatic Draught Indicator System (ADIS), (c) consider provision on camera-based monitoring, (d) facilitate information both at RCC and on board vessel and (e) consider a risk-based approach to identify the minimum redundancy where needed.
European Directive 2008/68/EC
The European Directive 2008/68/EC (UNECE 2019) refers to the Annexed Regulations of the European Agreement concerning the International Carriage of Dangerous Goods by Inland Waterways (ADN). The IWW use case does not include the carriage of dangerous goods. Hence, the European Directive 2008/68/EC was not considered herein.
RPNR
Rhine convention is applicable to the use case as its operation within Rhine-connected canals was considered. The RPNR contain navigation police provisions drawn up by the CCNR police regulations committee. Most of these regulations need to be adapted for vessels at level 3 and above of autonomy. Provisions, such as defining boat master (Ref. 1.02) in the context of autonomous vessels, could be treated with a low severity level, as it requires clarification-wise amendments. The provisions that require the crew presence (Ref. 1.04, 1.08, 4.06, 6.13.2, 6.32.1, 7.08.1) and other people on board (Ref. 1.03, 1.09.1) as well as the provision that implies an attended wheelhouse (Ref. 1.09.3) could be treated as moderately severe. These provisions can be addressed by employing shipboard Intelligent Machinery System (IMS) and Autonomous Navigation System (ANS). In this regard, emerging situational awareness technologies could be utilised with communication and network systems. Three compulsory blocks, namely vessel control system, connectivity and remote control centre with their associated functionalities, are also recommended to address the identified gaps. The recommendations for each identified gap are provided in Section A.3 of Supplementary note A.
Regulations for the RPN
The Regulations for the Rhine Navigation Personnel (RPN) define the crew member minimum number, qualifications, training and resting time. The first identified gap pertains to the minimum crew requirements. To comply with this provision, a minimum crew number should be maintained at RCCs to operate/monitor an autonomous vessel. This could be regarded as clarification-wise amendment. The second gap pertains to the ADN expert required on board vessels carrying dangerous goods. In this regard, a dedicated personal holding expert attestation could be on board to meet this provision for an unmanned vessel carrying dangerous goods. Details are provided in Section A.4 of Supplementary note A.
CEVNI
The European Code for Inland Waterways is issued by UNECE covers the police Regulations for the navigation of European inland waterway transport. The gaps identified by the applicability of the CEVNI Code to the autonomous vessels are similar to those related to the applicability of the RPNR.
European Directive 1996/50/EC
The European Directive 1996/50/EC harmonises the conditions for obtaining national boat masters’ certificates for the inland waterway carriage of goods and passengers.
According to the Article 2,
For the purposes of this Directive:
i. ‘boatmaster’ shall mean the person who has the necessary aptitude and qualifications to sail a vessel on the Member States’ waterways and who has nautical responsibility on board;
ii. ‘member of the deck crew’ shall mean a person who has regularly participated in sailing a vessel in inland navigation, including manning the tiller.
According to the Article 7, “an applicant must provide proof of at least four years’ professional experience as a member of the deck crew on an inland waterway vessel”.
These regulations mostly need definition/clarification-wise amendments for vessels at autonomy level 3 and above. The proposed recommendations provide revised definitions are included in Section A.6 of Supplementary note A.
European Directive 2014/112/EC
The European Directive 2014/112/EC implements the European Agreement concerning certain aspects of the organisation of working time in inland waterway transport. If people work in an RCC, this directive might not be relevant for them as they work on land. Therefore, it is necessary to include a provision considering the work time regulations for people who work on shore (RCC personnel). These regulations need to be adapted for vessels at level 3 and above of automation. Section A.7 of Supplementary note A includes the details of the proposed recommendations belong to this directive.
CLNI — Strasbourg Convention 2012
The Central Commission for the Navigation of the Rhine (CCNR) initiated the Strasbourg Convention on the limitation of liability in inland navigation (CLNI) 1988 based on the model of the convention on the limitation of liability for marine claims (LLMC). The Strasbourg Convention (CCNR 2012) modernised and repealed the Strasbourg convention of 1988.
The purpose is to allow vessel owners and crew members of inland vessels and their salvors to set a maximum amount to limit their liability in respect of claims made in connection with a single incident. It is found that the application of the CLNI convention to the autonomous vessels does not raise challenges.
CDNI — Strasbourg Convention of 1996
The main objective of the Strasbourg Convention on the collection, deposit and reception of waste generated during navigation on the Rhine and other inland waterways is to protect the environment and enhance safety in inland navigation. The Convention focuses on improved checking of any waste that occurs, through:
-
i.
The safe and separate collection and subsequent disposal of wastes arising from operating the vessel,
-
ii.
Requiring those causing wastes to pay the costs of collection and disposal,
-
iii.
The application of uniform regulations within all signatory states of the Convention to avoid any unfair competition.
The application of the CDNI convention relies mainly on the boat master. Within the scope of the CDNI convention, “boat master” means the person who has the vessel authority. As there is no further specification about the location from where the authority is exercised, the application of the CDNI Convention may not raise problems at autonomy level 3 and above.
4.1.2 Regional and local rules and regulations
Regional regulation on temporary exemption for experiments
The Flemish Decree (n.d) contains various provisions on mobility policy, public works and transport, traffic safety policy and innovative technologies (Chapter 3).
Article 50 and 51 of Chapter 3 describe the possibility of Flemish waterway authorities to issue temporary exemptions on certain rules and regulations to enable tests with innovative concepts. Those concepts may also include autonomous systems on board vessels or on-shore. The temporary exemptions pertain to rules and regulations about the crew, the vessel navigation, the shipboard equipment technical characteristics, the regulation of shipping traffic and the regulations pertaining to activities on-board and ashore. The exemptions cannot relate to provisions on supervision and enforcement and to provisions of a criminal nature.
The exemptions have a maximum validity period of one year and can be renewed, without their total validity period being allowed to exceed five years.
When admitting for the experiments or pilot projects, the following matters must be determined:
-
i.
The purpose of the experiments or pilot projects
-
ii.
The waterways, waterway sections or parts of the port area, the experiments or pilot projects are carried out
-
iii.
The period the admission applies
-
iv.
Which rules can be exempted and, where relevant, under which conditions exemptions are permitted
-
v.
Which safety measures are taken for the implementation of the experiments or the pilot projects.
The waterway manager or the port authority may withdraw the admission in whole or in part if, in his opinion, the safety as a result or partly as a result of the experiments or the pilot projects is endangered.
Belgian Royal Decree of 24/09/2006
The Belgian Royal Decree of 24/09/2006 regulates the navigation of vessels on inland waterways network in Belgium. The technical annex of the Decree contains the General Police Regulations for navigation of inland waterways (RPNE) based on the European Code for Inland Waterways (CEVNI). The Decree is complemented by local Regulations applicable to specific inland waterways.
The challenges raised by the applicability of the Belgian Decree to the autonomous vessels are similar to those related to the applicability of the RPNR.
4.1.3 Bureau Veritas classification rules
Bureau Veritas Rules for the Classification of inland vessels (NR 217 2019) provide the requirements for the assignment and maintenance of Class applicable to inland navigation vessels as well as to vessels operated in restricted maritime waters. This study identified several requirements that need modifications or clarifications for IWW autonomous operation. For instance, the requirement to carry documentation on board could be revised to carry a digital version on board for inspection purposes whilst keeping the physical version at the RCC. This type of recommendations is reasonable and easy to accept, thus categorised as of low severity. Other requirements, such as operation and maintenance of vessels in a conventional manner; way of operating watertight doors during navigation; the specific design of watertight doors for manual operation; control of diesel engines; requirements for piping systems — shutoff devices and remote-controlled valves; and supporting firefighting equipment, were categorised as of moderate severity. Alternative solutions were recommended by considering the upgraded vessel systems and KETs. A detail of these is listed separately in Supplementary note B. Justifications for the recommendations could be found in D7.4 of the AUTOSHIP project (Ahmed and Theotokatos 2022).
4.2 Liability and insurance framework
The analysis of liability and insurance frameworks is performed by considering the following four subtasks: (a) assessment of the current liability and insurance frameworks in the context of autonomous vessels; (b) identification of new stakeholders along with associated risks/challenges; (c) provision of recommendations for liability framework considering the shifting of liabilities among the identified stakeholders; (d) identification of issues pertinent to the insurance framework and provision of recommendations. The following subsections discuss each subtask.
Figure 5 presents the overview of the subtask (a) results. Figure 5 (left) indicates that 33% of the identified issues belongs to the vessel owners’ liability, 27% pertain to other liability and insurance issues, whereas the remaining issues pertain to the remote operators and system suppliers’ liabilities. Figure 5 (right) illustrates the percentages of the identified issues in different acts/rules/conventions. Thirty-seven percent of the identified issues pertains to the Merchant Shipping Act, whereas 27% are relevant to the general rules, whereas 18% pertains to the Hague an Hague-Visby rules, respectively. The remaining identified issues pertain to the Collison and Liability Limitation Convention.

Identified issues for liability and insurance frameworks: (left); percentages of identified issues for different stakeholders (left); percentages of issues based on different rules/acts/conventions (right)
4.2.1 Current liability and insurance framework analysis
The current liability framework, when it comes to third-party liability, is generally based on negligence. It means if anyone has caused damages to other parties due to his or her culpable manner, he or she is therefore liable for the damage (Falkanger et al. 2011). However, if the cause of an accident is an error in navigational algorithms for unmanned autonomous vessel, it is quite challenging to claim the insurance as the new modes of failure are not defined in the current rules.
The maritime industry is well known for its high rate of fatal injuries and high consequences of maritime disasters (Hansen et al. 2002; Hetherington et al. 2006). The investigations of underlying causes for marine causalities mostly point to the “human errors” as the single greatest contributor, which is 75–96% of all accidents (Allianz 2022; Rothblum 2000). In this regard, autonomy can reduce the explicit human intervention and enhancing the overall safety. The implementation of autonomy on small cargo vessels is expected to have the largest safety benefit, since these vessels account for the majority recorded vessel losses and lives lost (Vos et al. 2021). Although the occurrence of navigational accidents (e.g., collision, grounding) is expected to decrease with the development of autonomous vessels, the extent of consequences resulting particularly from non-navigational accidents (e.g., fire, ship loss due to structural failure) is expected to be much larger for the unmanned vessels when compared to the conventional ones (Wróbel et al. 2017). On the other hand, considering the causes behind the human errors on a wider socio-technical context that has given rise to causal mechanisms behind major maritime accidents in recent years, the weak links in form of dysfunctional interactions within the system of maritime safety control might still present for autonomous vessels, which needs to be strengthened (Puisa et al. 2018). Recently, Bačkalov et al. (2023) analysed 700 accidents which took place on the inland waterways in Austria and Serbia, which found that the removal of human operators from inland vessels could only have a limited positive impact on safety unless other aspects (primarily related to maintenance of the fleet and the waterway) are considered. Apart from that, from the liabilities’ point of view, the risk perspective will change. Although the overall risk level might be reduced by increased autonomy, there will be new risks introduced, such as failure in technology and limitation in technology. This change in the risk picture will affect not only the existing stakeholders but also new players, such as system suppliers (hardware and software) and the remote operators.
Under the existing liability framework, the vessel owner normally requires the crew or some other parties to be negligent for claiming the third-party insurance. That means that if there is a cause in the area of navigational algorithms, there is no liability at the starting point. However, the vessel owner may be held liable for negligence by the onshore control room operators or the system suppliers. If it is not possible to hold the owners liable based on negligence, it is possible to impose strict liability, which means liability irrespective of fault. Strict liability is quite common in land-based hazardous activities, and that might also be seen at the sea, although it is not currently the law. Also, there might be international or national legislation provided for strict liability. Where the liability comes to the cargo interest, the current liability regime is also based on fault and the human element. As long as the vessel owner reputed all the systems and the vessel is seaworthy, it would be difficult to hold him liable. Further analysis of the gaps identified in the current liabilities’ framework is mentioned in Section 4.2.3, and the proposed recommendations are listed in Supplementary note C. Justifications for the recommendations could be found in D7.4 of the AUTOSHIP project (Ahmed and Theotokatos 2022).
In regard to insurance, it is believed that the insurance will generally be available and that it is a question of the pricing of risk. There will also be some questions concerning the cyber risk and the maintenance of systems, which will be crucial for the safe operation of autonomous vessels. Classification societies’ guidelines/rules could be referred in this regard, for instance, DNV class notation Cyber secure (DNVGL-CG-0325 n.d) addresses cyber security by providing requirements and verification of technical barriers, processes and people awareness based on management of cyber risks on board DNV. On the other hand, BIMCO (BIMCO n.d — ver. 4) guidelines incorporate elements from the NIST framework and relevant IMO guidance on the management. They also incorporate International Association of Classification Societies (IACS) guidance on the cyber resilience. Their main focus is the cyber risk management and cyber risk assessment. UNCLOS does not explicitly deal with cyber-security issues such as cyberattacks on ships; however, interference with a merchant ship’s navigation and damage to that merchant ship constitute a violation of UNCLOS, depending on where the ship is located at the time of the attack. Other than that, if the cyberattack also causes an oil spill or other form of marine pollution, it violates the obligation to protect the marine environment under Article 192 of UNCLOS (Schatz and Gill 2023). Therefore, the cyber risk liability somehow is addressed in UNLOCS. Further analysis of insurance framework is mentioned in Section 4.2.4, and gaps and proposed recommendations are included in Supplementary note D. Justifications for the recommendations could be found in D7.4 of the AUTOSHIP project (Ahmed and Theotokatos 2022).
4.2.2 Anticipated stakeholders for autonomous vessels
From a global perspective, the increased automation and introduction of autonomous vessels are expected to reduce the level of risks and marine casualties, whereas, at the same time, new risks due to employing new technologies could also be introduced, which have not been quantified or insured previously. Historically, the legal systems and the insurance industry can address such risks without the need for fundamental changes to the basic principles. This is also applicable to autonomous vessels, although the required timelines cannot be estimated. Therefore, the autonomous vessels’ development and use of different autonomy levels is expected to allow the industry to assess the autonomy risks whilst considering the expected benefits.
Bolbot et al. (2021b) critically reviewed the safety methods employed by the maritime industry and developed a hybrid functional operational hazard identification (HAZID) method to address the limitations of traditional safety methods. Similar methods, methods reported in ARP 4761, System-Theoretic Process Analysis (STPA) or their combinations can be employed to address the autonomous vessels’ risk assessment.
Apart from the technological risk, risks associated with new stakeholders, such as remote operators and system suppliers/technology providers (DMA 2017), are anticipated in autonomous vessels. Incidences due to faults in navigation algorithms, hardware failure, or negligence of the operator would be new in this field, and possible liable parties must be defined and widely agreed. These new stakeholders will also share some liabilities with vessel owners and other stakeholders, which mean a gradual shifting in liabilities towards them is expected. The system suppliers and remote operators are expected to have an increased liability exposure, partly depending on the negotiations of the contract with the vessel owners and yards, as well as the applicable laws.
On the other hand, the vessel owners will be vicariously liable for the acts and omissions of the remote operators. However, the navigation system providers or the algorithm programmers are unlikely to be considered evenly liable as the ship master.
4.2.3 Changes in the distribution of liabilities among current stakeholders
To ensure the sustainable autonomous shipping, it is crucial to identify the changes in the liability distribution among the current stakeholders and the gradual shifting of responsibilities towards the new stakeholders. The following subsections discuss the liabilities of vessel owners, system suppliers and remote operators considering the autonomous shipping and propose amendments. Additionally, issues such as exemption from liability for nautical faults, preservation of evidence for any marine casualty, liable parties under criminal law and liability of new technology are analysed for autonomous vessels.
Liability of vessel owners
Vessel owners are considered the overall liable party for commercial shipping. Their liability is regulated nationally and depends, inter alia, on the vessel flag state and the territorial waters. In addition, owners bear secondary liability for their employees and those carry out work in the service of the vessel (employer liability) under section 151(1) of the merchant shipping act, which states: “The shipowner shall be liable for damage caused through fault or negligence in their service by the master, crew members, pilot or others who carry out work in the service of the ship.” Additional complexity is expected in relation to jurisdiction and enforcement against the remote operators.
The Hague and Hague-Visby rules (Hague-Visby Rules 1968) Art. 3 (2) states that: “Subject to the provisions of Article IV, the carrier shall properly and carefully load, handle, stow, carry, keep, care for and discharge the goods car.” On the other hand, section 262(1) of the merchant shipping act mentions that “The carrier shall perform the carriage with appropriate care and dispatch, take care of the goods and otherwise safeguard the interests of the owner from receipt to delivery of the goods.” Since the current liability regime is also based on negligence and the human element, it would be challenging to hold the vessel owner liable if he already ensured all systems working properly and the vessel is seaworthy. In this respect, the provision of the strict liability of vessel owners needs to be considered. In addition, it is also recommended to consider the vessel owners’ liability for the cargo carried whilst issuing the bill of lading.
Section C.1 of Supplementary note C provides the identified gaps associated with the shipowners’ third-party/civil liability, liability for collision, liability to show care for cargo and the right to limitation of liability for autonomous shipping, whilst recommending amendments to addresses them.
Liability of system suppliers
System suppliers include manufacturers and programmers of navigation and communication systems. Their liabilities could be categorised as contractual liability, third-party (product) liability and professional liability. Contractual liability considers the contract between the manufacturers/programmers and the yard/vessel owner to establish pertinent risks and identify liabilities. Any defects in supplies that do not impose damage on other objects or persons will be categorised as the manufacturers’ or programmers’ business risk. On the other hand, if their products and services cause injuries to persons or damage to objects, they could be liable pursuant to the regulations on third-party (product) liability. Professional liability of manufacturers and programmers depends on the extent that they could provide independent advice in addition to their product or service. Section C.3 of Supplementary note C provides the details of these liabilities.
Liability of remote operators
Stakeholders generally assume that the duties and responsibilities of the master will be delegated to the remote operator for autonomous vessels, and therefore, it is deduced that the remote operators would have liability and should be considered as independent liability subjects. Even in the context of fully autonomous vessels, it is expected that designation of a remote/responsible operator will be required to handle liabilities. Section C.4 of Supplementary note C explains the contractual and third-party liabilities of the remote operators. It is expected that the contractual regime will be similar to that of current technical and commercial managers. In relation to third-party liability, it is generally assumed that vessel owners will remain vicariously liable for the acts and omission of the remote operator.
Other issues
The Hague and Hague-Visby rules, Art. 4 (2)(a) mentions that: “Neither the carrier nor the vessel shall be responsible for loss or damage arising or resulting from (a) Act, neglect, or default of the master, mariner, pilot, or the servants of the carrier in the navigation or in the management of the ship.” In addition, section 276(1) of the merchant shipping act mentions that “The carrier shall not be liable if he can prove that loss or damage arose or resulted from: (1) fault or neglect in the navigation or management of the ship by the master, crew, pilot or others who work in the service of the ship and (2) fire, unless caused by fault or neglect of the carrier himself.”
However, the claiming exemption from liability for nautical faults for autonomous ships has yet to be defined. Other issues, such as preservation of evidence in any marine casualty, liable parties under criminal law and liability of new technology, are also needed to be defined anticipating the growth of autonomous vessels. Section C.4 of Supplementary note C addresses these gaps for autonomous vessels.
4.2.4 Insurance
It is anticipated that insurance coverage will be available for autonomous vessels, as the insurance market will adapt to the demand from vessel owners and technological developments. A clear international regulatory framework will act as a catalyst for maturing the insurance market for autonomous vessels. Until such framework is in place, stakeholders expect insurers to rely on flag state requirements and statutory certificate as well as verification from classification societies as a prerequisite for insuring autonomous vessels.
Risks associated with data exchange and dependency are not new to autonomous vessels operation. As other industries, shipping industry is also exposed to cyber risks. However, with the implementation of autonomous vessels, the cyber risk is expected to increase significantly. Traditional types of marine insurance, especially P&I and Machinery insurances, normally do not cover cyber risks, since they typically employ a so-called institute cyber-attack exclusion clause (CL 380), which implies that there is no insurance cover for damage “caused by or contributed to or arising from the use or operation, as a means for inflicting harm, of any computer, computer system, computer software programme, malicious code, computer virus or process or any other electronic system”.
On the other hand, the Baltic and International Maritime Council (BIMCO) cyber security clause (BIMCO n.d — ver. 4) was developed for contracts by a team comprised of owners, charterers, P&I clubs and legal experts. This clause mainly focuses on three important functions, which raise the risk awareness of each party, providing a mechanism to minimise the risk of a cyber incident, ensuring that the parties mitigate and resolve the effects of an incident, whilst cooperating to assist each other. In this respect, each party shall use reasonable endeavours to ensure that any third party providing services on its behalf complies with the cyber security clauses. However, it is still believed that there is a huge gap between the actual cyber risk and the limited insurance taken out in the maritime field, thus a major non-insured risk. Hence, the insurance instruments are often limited by a buy back (BIMCO n.d — ver. 4) for the limited range of the related risks in the cyber domain. The situation may further improve as the classification societies consistently develop and apply standardised cyber security requirements, e.g., unified requirements (UR) E26 (IACS UR E26 n.d) and UR E27 (IACS UR E27 n.d) from IACS based on IEC 62443.
Supplementary note D addresses the issues in the existing insurance framework to allow the autonomous vessels’ operation. It also provides details for the insurance pricing, recourse claims, seaworthiness under insurance law and the insurance of cyber risks.
5 Study implications
The operation of the IWW vessel is regulated by several authorities. However, none of the existing rules and regulations allows the operation of autonomous vessels within European waterways. Amendments/improvements are therefore expected to these instruments to allow the IWW autonomous vessels operation. In this respect, this study provides a systematic methodological approach to carry out the amendment process considering three follow-up stages, which will provide the pathway to upgrade the frameworks in alignment with the autonomous vessels’ growth. The employed approach is not limited by the requirements of particular projects, geographical areas (within European inland waterways) or timelines. Therefore, it can support IWW autonomous vessels. This study addressed the first two stages namely the existing and the transition stages. However, it can be extended to address the third stage where the NGAS are expected to operate at the highest autonomy level and humans are kept out of the loop. For the latter, the experience gained throughout the implementation of recommendations during the transition stage would be needed.
This study also identified the gaps in the regulatory, liability and insurance frameworks that could hinder the operation of autonomous IWW vessels in EU waterways. These gaps were categorised based on their severity level. This will help the policymakers to approximate the timelines to amend the pertinent instruments, thus supporting the roadmap development for the IWW next-generation autonomous ships.
The recommendations provided for each identified gap provide insights to the policymakers and can guide on developing appropriate policies. The provided recommendations though may need further refinement based on experience gained in the short to medium terms. Furthermore, future studies need to provide regulations for carrying dangerous goods and passengers.
6 Conclusions
This study investigated the regulatory, liability and insurance frameworks for the operation and testing of autonomous IWW vessels in EU waterways. A comprehensive review of pertinent literature was carried out to identify the potential gaps and classify them as of high, moderate or low severity. Recommendations were then proposed to address the gaps considering the CCNR defined autonomy levels.
The main findings pertinent to the regulatory framework are summarised as follows.
-
i.
Several regulations need definition or clarification-wise amendments and are deemed of low severity; thus, they can be widely accepted. These amendments can be addressed in the short term.
-
ii.
There are some instruments that require alternative solutions for remote and autonomous operations, which can be addressed by employing key enabling technologies (KETs). These amendments are categorised of moderate severity.
-
iii.
Provisions that require explicit human involvement are deemed of high severity, as they require alternative solutions and can reach wider acceptance in the medium to long terms.
-
iv.
A minimum redundancy to achieve a satisfactory safety level must be evaluated as a part of the risk assessment and cost–benefit analysis.
The main findings relevant to the insurance and liabilities frameworks are as follows.
-
i.
In the context of autonomous vessels, the vessel owner will be vicariously liable for the acts and omissions of the remote operator/RCC personnel.
-
ii.
The fault-based liability of the vessel owner needs to be replaced by strict liability, which means liability irrespective of fault.
-
iii.
The interpretation of the wording “fault of a vessel” in the 1910 Collision Convention should be expanded to encompass “malfunctioning of the vessel” which is solely due to technical failure or inadequate programming.
-
iv.
To justify the cargo caring liability, wordings of charter parties will be adapted, as charter parties in most jurisdictions are subject to the principle of freedom of contract.
-
v.
Remote operators of autonomous vessels will be addressed by the right to limitation of liability; however, it is challenging to provide access to limitation of liability for manufacturers and programmers of autonomous vessels’ navigation systems, since they are not the considered persons for whom the vessel owner is liable.
-
vi.
A new risk assessment needs to be carried out for the new technologies adopted in autonomous vessels to understand the coverage required by the insurer and associated insurance premium.
-
vii.
Insurers can add or amend clauses using specific wording without having to base themselves on regulations; hence, the insurance framework will be able to adapt faster than the regulatory framework.
-
viii.
New insurance products need to be developed to ensure the actual coverage needed for cyber risk and the extent of loss for autonomous vessels.
It must be noted that the proposals listed in this study are expected to be beneficial for the policymakers to prepare the roadmap for autonomous vessels’ adoption by focusing on the timespan needed to amend the existing regulations at different severity levels. However, some proposals require commercialised KETs (TRL 9), although they are still at demonstration level (TRL 6). Further amendments are also expected to certain instruments, which recommend granting temporary exemptions at initial stage. Future studies are expected to investigate the implementation of the proposed amendments, whilst following the developments of technologies for rendering the operations of next-generation autonomous vessels.
Abbreviations
- ADN:
-
Annexed Regulations of the European Agreement concerning the International Carriage of Dangerous Goods by Inland Waterways
- ALARP:
-
As low as reasonably practical
- CCNR:
-
Central Commission for Navigation on the Rhine
- CESNI:
-
Comité Européen pour l’Élaboration de Standards dans le Domaine de Navigation Intérieure
- CEVNI:
-
European Code for Inland Waterways
- CLNI:
-
Convention on the limitation of liability in inland navigation
- CDNI:
-
Convention on collection, deposit and reception of waste produced during navigation on the Rhine and inland waterways
- DVW:
-
De Vlaamse Waterweg NV
- ESTRIN:
-
Establishing the technical regulations for inland vessels
- IWW:
-
Inland waterway
- LLMC:
-
Limitation of liability for marine claims
- MDK:
-
Maritieme Dienstverlening en Kust
- MT:
-
Maritieme Toegang
- RPN:
-
Rhine Navigation Personnel
- RPNE:
-
Decree is the General Police Regulations for navigation of inland waterways
- UNECE:
-
United Nations Economic Commission for Europe
- UNCLOS:
-
United Nations Convention on the Law of the Sea
References
AEGIS (2020) https://aegis.autonomous-ship.org/
Allianz (2022) Safety and shipping review 2022: an annual review of trends and developments in shipping losses and safety. Allianz Global Corporate & Specialty, Munich
AUTOSHIP. Autonomous Shipping Initiative for European Waters (2019) [Available from: https://www.autoship-project.eu/
Ahmed YA, Theotokatos G (2022) AUTOSHIP Deliverable 7.4 “Proposed regulatory, legal and liabilities frameworks amendments” downloadable from the AUTOSHIP project website https://www.autoshipproject.eu/downloads/
Bjorn-Morten B, Per L, Peter W (2017) Towards autonomous maritime operations. IEEE International Conference on Computational Intelligence and Virtual Environments for Measurement Systems and Applications (CIVEMSA). pp 1–6. https://doi.org/10.1109/CIVEMSA.2017.7995339
Burmeister H-C, Bruhn W, Rødseth ØJ, Porathe T (2014) Autonomous unmanned merchant vessel and its contribution towards the e-navigation implementation: the MUNIN perspective. Int J e-Navig Maritime Econ 1:1–13
Bačkalov I (2020) Safety of autonomous inland vessels: an analysis of regulatory barriers in the present technical standards in Europe 128:104763. https://doi.org/10.1016/j.ssci.2020.104763
Bačkalov I, Vidić M, Rudaković S (2023) Lessons learned from accidents on some major European inland waterways. Ocean Eng 273:113918. https://doi.org/10.1016/j.oceaneng.2023.113918
Belgian Royal Decree of 24/09/2006 – Police regulations for the navigation of the Belgian inland waterways
Bolbot V, Theotokatos G et al (2021a) AUTOSHIP Deliverable 2.4 “Risk assessments, fail-safe procedures and acceptable criteria” downloadable from the AUTOSHIP project website https://www.autoshipproject.eu/downloads/
Bolbot V, Theotokatos G, Wennersberg LA et al (2021b) A novel risk assessment process with application to autonomous inland waterways vessel. Part O J Risk Reliab. Accepted on 17/9/2021b. https://doi.org/10.1177/1748006X211051829
BIMCO. The Guidelines on Cyber Security Onboard Ships Version 4.0. https://www.bimco.org/about-us-and-our-members/publications/the-guidelines-on-cyber-security-onboard-ships
Bureau Veritas Marine & Offshore (2019) Rules for the classification of inland navigation vessels
CMI (2016) CMI International working group position paper on unmanned ships and the international regulatory framework
Central Commission for the Navigation of the Rhine (2018) Definitions on various forms of automated navigation
European Commission (1996) Council Directive 96/50/EC of 23 July 1996 on the harmonization of the conditions for obtaining national boat masters’ certificates for the carriage of goods and passengers by inland waterway in the Community
European Commission (2014) Council Directive 2014/112/EU of 19 December 2014 implementing the European Agreement concerning certain aspects of the organisation of working time in inland waterway transport, concluded by the European Barge Union (EBU), the European Skippers Organisation (ESO) and the European Transport Workers’ Federation (ETF)
Central Commission for the Navigation of the Rhine (2012) Strasbourg Convention of 2012 on the Limitation of Liability in Inland Navigation
Central Commission for the Navigation of the Rhine (CCNR) (2019), Convention on the collection, deposit and reception of waste generated during navigation on the Rhine and other inland waterways, unofficial version, January 2019
Convention on Limitation of Liability for Maritime Claims (LLMC), London, 1976
Convention for the Unification of Certain Rules of Law with respect to Collisions between Vessels, Brussels, 1910
CA&Cefor (2018) Maritime Autonomous Surface Ships (MASS)–Zooming-in-on-civil-liability-and-insurance---10-december-2018.pdf (cefor.no), CORE Advokatfirma and Cefor. 10 Dec 2018
Chang CH, Kontovas C, Yu Q, Yang Z (2021) Risk assessment of the operations of maritime autonomous surface ships. Reliab Eng Syst Saf 207:107324. https://doi.org/10.1016/j.ress.2020.107324
DMA (2017) Analysis of the regulatory barriers to the use of autonomous ships. Report (safety4sea.com)
DNVGL-CG-0325 (n.d). Cyber secure. https://rules.dnv.com/docs/pdf/DNV/CG/2020-10/DNVGL-CG-0325.pdf
European Directive 2016/1629/EC (2017) European Standard laying down Technical Requirements (ESTRIN), European Committee for drawing up Standards in the field of Inland Navigation
European Directive 2008/68/EC (2019) European Agreement concerning the International Carriage of Dangerous Goods by Inland Waterways (A.D.N)
Erceg BČ (2018) Legal framework of European inland waterways and Croatian legislation on inland. https://doi.org/10.19044/esj.2018.c3p4, https://core.ac.uk/download/pdf/236407788.pdf
EMSA (2020) Study of the risks and regulatory issues of specific cases of MASS. Ship safety standards - SAFEMASS study of the risks and regulatory issues of specific cases of MASS - EMSA - European Maritime Safety Agency (europa.eu)
Fastvold OL (2018) Legal challenges for unmanned ships in international law of the sea. UiT Norges arktiske universitet. https://munin.uit.no/bitstream/handle/10037/16077/thesis.pdf?sequence=1&isAllowed=y
Flemish Decree. A new approach to public transport in Flanders: from basic mobility to basic accessibility | Eubelius https://www.eubelius.com/en/news/a-new-approach-to-public-transport-in-flanders-from-basic-mobility-to-basic-accessibility [accessed on 16 Apr 2023]
Falkanger T, Bull HJ, Brautaset L (2011) Scandinavian maritime law - the Norwegian perspective, Universitetsforlaget. https://www.jus.uio.no/nifs/english/research/publications/books/scandinavian-maritime-law
Home AS, Veitch E, Vasstein K (2022) WMU J Marit Aff 21:179–211. https://doi.org/10.1007/s13437-022-00278-y
Heffner K, Rødseth ØJ (2019) Enabling technologies for maritime autonomous surface ships. J Phys Conf Ser 1357:01202. https://doi.org/10.1088/1742-6596/1357/1/012021
Hansen HL, Nielsen D, Frydenberg M (2002) Occupational accidents aboard merchant ships. Occup Environ Med 59:85. https://doi.org/10.1136/oem.59.2.85
Hetherington C, Flin R, Mearns K (2006) Safety in shipping: the human element. J Saf Res 37:401–411. https://doi.org/10.1016/j.jsr.2006.04.007
Henrik R, Mika V, Jussi P, Saara I (2020) Charting regulatory frameworks for maritime autonomous surface ship testing, pilots, and commercial deployments https://julkaisut.valtioneuvosto.fi/bitstream/handle/10024/162560/LVM_2020_20.pdf
IMO (2020) Regulatory scoping exercise. https://www.imo.org/en/MediaCentre/HotTopics/Pages/Autonomous-shipping.aspx
IACS UR E26 (n.d): International Association of Classification Societies, Cyber resilience of ships - Rev.0, April 2016
IACS UR E27 (n.d): International Association of Classification Societies, Cyber resilience of on-board systems and equipment - Rev.0, April 2016
Jeon J, Lee P, Theotokatos G (2022) AUTOSHIP Deliverable 7.2 “Autonomous ships: training framework for crew, operators and designers” downloadable from the AUTOSHIP project website https://www.autoshipproject.eu/downloads/
Juridisch O (2019) Smart shipping. Erasmus School of Law. Juridisch Onderzoek Smart Shipping. https://open.overheid.nl/documenten/ronl-b47585cf-6798-4d32-aa24-908922670060/pdf
Kongsberg, 2020. First adaptive transit on Bastøfosen VI [WWW Document]. URL https://www.kongsberg.com/maritime/about-us/news-and-media/news-archive/2020/first-adaptive-transit-on-bastofosen-vi/ (accessed 4.27.21)
Komianos A (2018) The autonomous shipping era. Operational, regulatory, and quality challenges. TransNav: International Journal on Marine Navigation and Safety of Sea Transportation 12(2):335–348. https://doi.org/10.12716/1001.12.02.15
Karlis T (2018) Maritime law issues related to the operation of unmanned autonomous cargo ships. WMU J Marit Aff 17:119–128
Kim D, Lee C, Park S, Lim S (2022) Potential liability issues of AI-based embedded software in maritime autonomous surface ships for maritime safety in the Korean maritime industry. J Mar Sci Eng 10:498. https://doi.org/10.3390/jmse10040498
Lee TK (2016) Liability of autonomous ship: the Scandinavian perspective. University of Oslo MasterThesis_8018.pdf (uio.no)
Motorways of the Sea (2001) https://transport.ec.europa.eu/transport-modes/maritime/motorways-sea_en
MUNIN (2013) 7.2: legal and liability analysis for remote controlled vessels. Rapport - NORSK (unmanned-ship.org)
MOSES (2020) https://moses-h2020.eu/
Merchant shipping act (2014) Consolidated Act no.75 of 17 as amended. https://dma.dk/Media/637776645613103384/The%20merchant%20shipping%20act%20(consolidation).pdf
Puisa R, Lin L, Bolbot V, Vassalos D (2018) Unravelling causal factors of maritime incidents and accidents. Saf Sci 110:124–141
Rothblum AM (2000) Human error and marine safety. Presented at the National Safety Council Congress and Expo, U.S. Coast Guard Research & Development Center, Orlando, FL, USA
Rolls-Royce (2018) Press releases [WWW Document]. Rolls-Royce and Finferries demonstrate world’s first fully autonomous ferry. URL https://www.rolls-royce.com/media/press-releases.aspx (accessed 4.18.21)
Resolution N° 24 (1985) – European Code for Inland Waterways, adopted on 15/11/ 1985
Schatz V, Gill T (2023) Handbook on maritime hybrid threats: 15 scenarios and legal scans (2nd ed.). Hybrid CoE Paper 16. (3) (PDF) Handbook on Maritime Hybrid Threats: 15 scenarios and legal scans (2nd ed.) (researchgate.net)
Sullivan BP, Desai S, Sole J, Rossi M, Ramundo L, Terzi S (2020) Maritime 4.0 – opportunities in digitalization and advanced manufacturing for vessel development. Procedia Manuf 42:246–253. https://doi.org/10.1016/j.promfg.2020.02.078
Smartmaritime (2020) ASKO to build two autonomous vessels for Oslo fjord operations. https://smartmaritimenetwork.com/2020/09/01/asko-to-build-two-autonomous-vessels-for-oslo-fjord-operations/. Accessed 10/11/2020 2020
Singapore Maritime Week 2022. SMW | SMW 2022
The Hague-Visby Rules – The Hague Rules as amended by Brussels Protocol, 1968
Vos J, Hekkenberg RG, Banda OAV (2021) The impact of autonomous ships on safety at sea – a statistical analysis. Reliab Eng Syst Saf 210:107558. https://doi.org/10.1016/j.ress.2021.107558
Wa N et al (2021) Regulatory framework analysis for the unmanned inland waterway vessel. WMU J Marit Aff 20:357–376. https://doi.org/10.1007/s13437-021-00237-z
Wróbel K, Montewka J, Kujala P (2017) Towards the assessment of potential impact of unmanned vessels on maritime transportation safety. Reliab Eng Syst Saf 165:155–169. https://doi.org/10.1016/j.ress.2017.03.029
Yara (2017) YARA and KONGSBERG enter into partnership to build world’s first autonomous and zero emissions ship | Yara International [WWW Document]. URL https://www.yara.com/corporate-releases/yara-and-kongsberg-enter-intopartnership-to-build-worlds-first-autonomous-and-zero-emissions-ship/ (accessed 11.8.21)
Zhu L, Xing RWW (2020) Probing civil liability insurance for unmanned/autonomous merchant ships. https://doi.org/10.1007/978-3-030-27386-6_16
Funding
The study was carried out in the framework of the AUTOSHIP project, which is funded by the European Union’s Horizon 2020 research and innovation programme under agreement no. 815012. The authors affiliated with the MSRC received funding from DNV AS and RCCL for the MSRC establishment and operation.
The authors have no conflicts of interest to declare that are relevant to the content of this article. The opinions expressed herein are those of the authors and should not be construed to reflect the views of EU, DNV AS, RCCL and the AUTOSHIP partners.
Author information
Authors and Affiliations
Corresponding author
Additional information
Publisher's note
Springer Nature remains neutral with regard to jurisdictional claims in published maps and institutional affiliations.
Supplementary Information
Below is the link to the electronic supplementary material.
Rights and permissions
Open Access This article is licensed under a Creative Commons Attribution 4.0 International License, which permits use, sharing, adaptation, distribution and reproduction in any medium or format, as long as you give appropriate credit to the original author(s) and the source, provide a link to the Creative Commons licence, and indicate if changes were made. The images or other third party material in this article are included in the article's Creative Commons licence, unless indicated otherwise in a credit line to the material. If material is not included in the article's Creative Commons licence and your intended use is not permitted by statutory regulation or exceeds the permitted use, you will need to obtain permission directly from the copyright holder. To view a copy of this licence, visit http://creativecommons.org/licenses/by/4.0/.
About this article

Cite this article
Ahmed, Y.A., Theotokatos, G., Maslov, I. et al. Towards autonomous inland waterway vessels — a comprehensive analysis of regulatory, liability and insurance frameworks. WMU J Marit Affairs 23, 73–101 (2024). https://doi.org/10.1007/s13437-023-00316-3
Received:
Accepted:
Published:
Issue Date:
DOI: https://doi.org/10.1007/s13437-023-00316-3