
Abstract
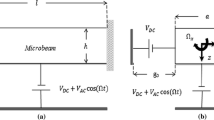
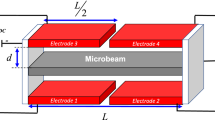
The impetus of the study is to present a novel micro electro mechanical system based tunable gyroscope with the possibility of sensitivity enhancement using appropriate electrostatic hopping voltages. The proposed model is a silicon-based clamped–clamped micro beam sandwiched with two piezoelectric layers throughout the entire length. The nonlinear electrostatic forces are applied to the micro beam along its sense and drive mode directions (either lateral sides). The drive mode actuation is a combination of a direct current (DC) and an alternating current voltage; whereas the sense mode actuation is a pure DC voltage. The micro beam oscillates along the drive mode due to the harmonic drive mode excitation; as the micro beam undergoes base rotation, the Coriolis force induces another motion in the direction of the sense mode which is perpendicular to the drive mode direction. The more is the amplitude of the base rotation, the more is the sense mode amplitude. The sense mode amplitude is directly attributed to the magnitude of base rotation. The piezoelectric layers are actuated by a DC voltage which leads to an axial force proportional to the applied DC voltage. Exciting the piezoelectric layers changes the overall stiffness of the micro beam and as a result the operating frequency of the gyroscope becomes tunable. The partial differential equation of the motion is derived using Hamiltonian principle and discretized into two nonlinear ordinary differential equations along the drive and sense mode directions. The shooting method is used to capture the periodic motion orbits and accordingly the frequency response curves. By using Floquet theory the stability of the periodic orbits is determined. Due to the nonlinearity of the governing equations in the vicinity of the primary resonance, the gyroscope exhibits multi-response solution; Applying appropriate hopping voltages, the micro beam is pushed into the attraction basin of the response with higher amplitude and accordingly the sensitivity of the gyroscope is enhanced. The proposed gyroscope not only has the capability of having improved sensitivity but also its operating frequency can be tuned both in forward and backward directions by means of applying appropriate piezoelectric voltage with an appropriate polarity.











Similar content being viewed by others

References
Acar, C., & Shkel, A. M. (2005). An approach for increasing DRIVE-MODE bandwidth of MEMS vibratory gyroscopes. Journal of Microelectromechanical System, 14(3), 520–528.
Zhang, Y., & Wang, W. (2009). Enhanced sensitivity of a surface acoustic wave gyroscope. Japanese Journal of Applied Physics, 48, 104502.
Oh, H., Lee, K., Yang, S. S., & Wang, W. (2011). Enhanced sensitivity of a surface acoustic wave gyroscope using a progressive wave. Journal of Micromechanics and Microengineering, 21, 075015.
Moon, S. J. Fabrication of micro gyroscope on the SOI substrate with enhanced sensitivity for detecting vertical motion (p. CA 94720), Department of Mechanical Engineering, University of California, Berkeley.
Thiruvenkatanathan, P., Yan, J., Woodhouse, J., & Seshia, A. A. (2009). Enhancing parametric sensitivity in electrically coupled MEMS resonators. Journal of Microelectromechanical System, 18(5), 1077–1086.
Shkel, A. M., Horowitz, R., Seshia, A. A., Park, S., & Howe, R. T. (1999). Dynamics and control of micromachined gyroscopes. Proceedings of the American Control Conference, 3, 2119–2124.
Kawai, H., Atsuchi, K. I., Tamura, M., & Ohwada, K. (2001). High-resolution micro gyroscope using vibratory motion adjustment technology. Sensors and Actuators, A: Physical, 90, 153–159.
Prikhodko, I. P., Zotov, S. A., Trusov, A. A., & Shkel, A. M. (2011). Sub-degree-per-hour silicon MEMS rate sensor with 1 million Q-Factor. In Solid-state sensor, actuators and microsystems conference transducers’11 (pp. 2809–2812).
Nitzan, S., Ahn, C. H., Su, T.-H., Li, M., Ng, E. J., Wang, S., Yang, Z. M., O’Brien, G., Boser, B. E., Kenny, T. W., & Horsley, D. A. (2013). Epitaxially-encapsulated polysilicon disk resonator gyroscope. In Proceedings of the IEEE international conference on micro electro mechanical systems (pp. 625–628).
Sharma, A., Zaman, M. F., Zucher, M., & Ayazi, F. (2008). A 0.1˚/hr bias drift electronically matched tuning fork micro gyroscope. In Proceeding of IEEE international conference on micor electro mechanical systems (MEMS) (pp. 6–9).
Handtmann, M., Aigner, R., Meckes, A., & Wachutka, G. K. M. (2002). Sensitivity enhancement of MEMS inertial sensors using negative springs and active control. Sensors and Actuators A, 97–98, 153–160.
Sung, W. T., Lee, J. Y., Lee, J. G., & Kang, T. (2006). Design and fabrication of an automatic mode controlled vibratory gyroscope. In 16th IEEE international conference on MEMS.
Elsayed, M. Y., Nabki, F., & El-Gamal, M. N. (2013). A novel comb architecture for enhancing the sensitivity of bulk mode gyroscope. Journal of Sensors, 13, 16641–16656.
Acar, C., & Shkel, A. M. (2003). Distributed-mass micromachined gyroscopes for enhanced mode-decoupling. IEEE, 1, 445–450.
Wang, W., Oh, H., Lee, K., Yoon, S., & Yang, S. (2009). Enhanced sensitivity of novel surface acoustic wave microelectromechanical system-interdigital Transducer Gyroscope. Japanese Journal of Applied physics, 48, 06FK09.
Sung, S., Sung, W. T., Kim, C., Yun, S., & Lee, Y. J. (2009). On the mode-matched control of mems vibratory gyroscope via phase-domain analysis and design. Journal of Mechatronic, 14(4), 446–455.
Xiao, D., Cao, S., Hou, Z., Chen, Z., Wang, X., & Wu, X. (2015). Enhanced sensitivity in a butterfly gyroscope with a hexagonal oblique beam. Applied Physics Reviews, 5, 041331.
Rezazadeh, G., Ghanbari, M., Mirzaee, I., & Keyvani, A. (2010). On the modeling of a piezoelectrically actuated microsensor for simultaneously measuring of fluids viscosity and density. Journal of Measurement, 43, 1516–1524.
Mahmoodi, S. N., & Jalili, N. (2009). Piezoelectrically actuated microcantilevers: An experimental nonlinear vibration analysis. Journal of Sensors and Actuators A, 150, 131–136.
Azizi, S., Ghazavi, M. R., Khadem, S. E., Rezazadeh, G., & Cetinkaya, C. (2013). Application of piezoelectric actuation to regularize the chaotic response of an electrostatically actuated micro-beam. Journal of Nonlinear Dynamics, 73(1–2), 853–867.
Azizi, S., Ghazavi, M. R., Rezazadeh, G., Ahmadian, I., & Cetinkaya, C. (2013). Tuning the primary resonance of a micro resonator, using piezoelectric actuation. Nonlinear Dynamics, 76(1), 839–852.
Azizi, S., Ghazavi, M. R., Khadem, S. E., Yang, J., & Rezazadeh, G. (2012). Stability analysis of a parametrically excited functionally graded. MEM system, Current Applied Physic, 12, 456–466.
Vahdat, A. S., Rezazadeh, G., & Ahmadi, G. (2011). Thermoelastic damping in a micro-beam resonator tunable with piezoelectric layers. Acta Mechanica Solidia Sinica, 25(1), 73–81.
Azizi, S., Rezazadeh, G., Ghazavi, M., & Khadem, S. E. (2011). Stabilizing the pull-in instability of an electro-statically actuated micro-beam using piezoelectric actuation. Applied Mathematical Modelling, 35, 4796–4815.
Rezazadeh, G., Talebian, S., Yagubizade, H., & Alizadeh, Y. (2009). Piezoelectric layers application to control of pull-in voltage and natural frequency of an electrostatically actuated microplate. Journal of Mechanics and MEMS, 1(2), 445–456.
Rasekh, M., & Khadem, S. E. (2013). Design and performance analysis of nanogyroscope based on electrostatic actuation and capacitive sensing. Journal of Sound and Vibration, 332, 6155–6168.
Younis, M. I. (2010). MEMS linear and nonlinear statics and dynamics (Vol. 1, p. 453). New York: Springer.
Nayfeh, A. H., & Mook, D. T. (1995). Nonlinear oscillations. Blacksburg: Wiley.
Nayfeh, A. H., Younis, M. I., & Abdel-Rahman, E. (2007). Dynamic pull-in phenomenon in MEMS resonators. Journal of Nonlinear Dynamic, 48, 153–163.
Zhang, Y., & Zhao, Y.-P. (2006). Numerical and analytical study on the pull-in instability of micro-structure under electrostatic loading. Sensors and Actuators A, 127, 366–380.
Author information
Authors and Affiliations
Corresponding author
Additional information
Publisher's Note
Springer Nature remains neutral with regard to jurisdictional claims in published maps and institutional affiliations.
Appendix
Appendix
The governing motion equations reduces to:
and
For n = 1, 2 … M.
Rights and permissions
About this article

Cite this article
Rezaei Kivi, A., Azizi, S. An Approach for Increasing Sensitivity of a Tunable Micro Electro Mechanical Sensor Using Electrostatic Hopping Voltage. Sens Imaging 20, 11 (2019). https://doi.org/10.1007/s11220-019-0229-z
Received:
Revised:
Published:
DOI: https://doi.org/10.1007/s11220-019-0229-z