
Abstract
Mimoun et al. (Space Sci Rev 211(1–4):383–428, 2017) developed a pre-landing noise model of the Martian seismometer package SEIS onboard InSight that analysed all the external and internal noise sources. We updated the environmental and instrumental parameters of the model as well as the ground properties with InSight mission data. We compared the output of the in situ noise model to the actual noise measured during the full mission for each individual noise source as well as for the full noise model. We evaluate in detail the efficiency of the model to fit the measured data and discuss the transient noise and other sources that were not included in the model. The main noise sources in the seismic bandwidth are the pressure noise and the lander noise, which is increased from the pre-landing model and overestimated when compared to the data; the magnetic field noise was overestimated in the pre-landing model and is now found to be negligible. The conclusions and models from this study could benefit future space missions.

















Similar content being viewed by others


References
Anderson DL, Miller WF, Latham GV et al. (1977) Seismology on Mars. J Geophys Res 82(28):4524–4546. https://doi.org/10.1029/js082i028p04524
Banerdt WB, Smrekar SE, Banfield D et al. (2020) Initial results from the InSight mission on Mars. Nat Geosci 13(3):183–189. https://doi.org/10.1038/s41561-020-0544-y
Banfield D, Rodriguez-Manfredi JA, Russell CT et al (2019) InSight Auxiliary Payload Sensor Suite (APSS). Space Sci Rev 215:4. https://doi.org/10.1007/s11214-018-0570-x
Banfield D, Spiga A, Newman C et al. (2020) The atmosphere of Mars as observed by InSight. Nat Geosci 13(3):190–198. https://doi.org/10.1038/s41561-020-0534-0
Carrasco S, Knapmeyer-Endrun B, Margerin L et al. (2023) Empirical H/V spectral ratios at the InSight landing site and implications for the Martian subsurface structure. Geophys J Int 232(2):1293–1310
Ceylan S, Clinton JF, Giardini D et al. (2021) Companion guide to the marsquake catalog from InSight, Sols 0-478: data content and non-seismic events. Phys Earth Planet Inter 310:106597
Charalambous C, Stott AE, Pike WT et al. (2021) A comodulation analysis of atmospheric energy injection into the ground motion at InSight, Mars. J Geophys Res, Planets 126:e2020JE006538. https://doi.org/10.3929/ethz-b-000479669
Dahmen NL, Zenhäusern G, Clinton J et al (2021) Resonances and lander modes observed by insight on Mars (1-9 Hz). Bull Seismol Soc Am 111(6). https://doi.org/10.3929/ethz-b-000515229
Drilleau M, Samuel H, Garcia RF et al. (2022) Marsquake locations and 1-D seismic models for Mars from InSight data. J Geophys Res, Planets 127:e2021JE007067. https://doi.org/10.1029/2021JE007067
Forbriger T, Widmer-Schnidrig R, Wielandt E et al. (2010) Magnetic field background variations can limit the resolution of seismic broad-band sensors. Geophys J Int 183(1):303–312. https://doi.org/10.1111/j.1365-246X.2010.04719.x
Garcia RF, Kenda B, Kawamura T et al. (2020) Pressure effects on the SEIS-InSight instrument, improvement of seismic records, and characterization of long period atmospheric waves from ground displacements. J Geophys Res, Planets 125:e2019JE006278. https://doi.org/10.1029/2019JE006278
Giardini D, Lognonné P, Banerdt WB et al. (2020) The seismicity of Mars. Nat Geosci 13(3):205–212. https://doi.org/10.1038/s41561-020-0539-8
Golombek M, Warner NH, Grant JA et al. (2020a) Geology of the InSight landing site on Mars. Nat Commun 11:1014. https://doi.org/10.1038/s41467-020-14679-1
Golombek M, Williams N, Warner NH et al (2020b) Location and setting of the Mars InSight lander, instruments, and landing site. Earth Space Sci 7(10). https://doi.org/10.1029/2020EA001248
Golombek M, Hudson T, Bailey P et al. (2023) Results from InSight robotic arm activities. Space Sci Rev 219(3):20. https://doi.org/10.1007/s11214-023-00964-0
InSight Mars SEIS Data Service (2019) SEIS raw data, Insight Mission. IPGP, JPL, CNES, ETHZ, ICL, MPS, ISAE-Supaero, LPG, MFSC. https://doi.org/10.18715/SEIS.INSIGHT.XB_2016
Johnson CL, Mittelholz A, Langlais B et al. (2020) Crustal and time-varying magnetic fields at the InSight landing site on Mars. Nat Geosci 13(3):199–204. https://doi.org/10.1038/s41561-020-0537-x
Joy S, Russel CT (2020) InSight IFG magnetometer Mars calibrated data collection. https://arcnav.psi.edu/urn:nasa:pds:insight-ifg-mars:calibration
Kenda B, Drilleau M, Garcia RF et al. (2020) Subsurface structure at the InSight landing site from compliance measurements by seismic and meteorological experiments. J Geophys Res, Planets 125:e2020JE006387. https://doi.org/10.1029/2020JE006387
Kim D, Davis P, Lekić V et al. (2021) Potential pitfalls in the analysis and structural interpretation of seismic data from the Mars InSight mission. Bull Seismol Soc Am 111(6):2982–3002. https://doi.org/10.1785/0120210123
Langlais B, Purucker ME, Mandea M (2004) Crustal magnetic field of Mars. J Geophys Res, Planets 109:2008. https://doi.org/10.1029/2003JE002048
Lognonné P, Mosser B (1993) Planetary seismology. Surv Geophys 14(3):239–302. https://doi.org/10.1007/BF00690946
Lognonné P, Banerdt WB, Giardini D et al. (2019) SEIS: Insight’s Seismic Experiment for Internal Structure of Mars. Space Sci Rev 215:12. https://doi.org/10.1007/s11214-018-0574-6
Lognonné P, Banerdt WB, Pike WT et al. (2020) Constraints on the shallow elastic and anelastic structure of Mars from InSight seismic data. Nat Geosci 13(3):213–220. https://doi.org/10.1038/s41561-020-0536-y
Lognonné P, Banerdt WB, Clinton J et al. (2023a) Mars seismology. Annu Rev Earth Planet Sci 51:643–670. https://doi.org/10.1146/annurev-earth-031621-073318
Lognonné P, Schimmel M, Stutzmann E et al. (2023b) Detection of Mars normal modes from S1222a event and seismic hum. Geophys Res Lett 50(12):e2023GL103205
Lorenz RD (1996) Martian surface wind speeds described by the Weibull distribution. J Spacecr Rockets 33(5):754–756. https://doi.org/10.2514/3.26833
Lorenz RD (2012) Planetary seismology—expectations for lander and wind noise with application to Venus. Planet Space Sci 62(1):86–96
Lorenz RD, Shiraishi H, Panning M et al. (2021) Wind and surface roughness considerations for seismic instrumentation on a relocatable lander for Titan. Planet Space Sci 206:105320. https://doi.org/10.1016/j.pss.2021.105320
Mimoun D, Murdoch N, Lognonné P et al. (2017) The noise model of the SEIS seismometer of the InSight mission to Mars. Space Sci Rev 211(1–4):383–428. https://doi.org/10.1007/s11214-017-0409-x
Mittelholz A, Johnson CL, Fillingim M et al. (2023) Mars’ external magnetic field as seen from the surface with InSight. J Geophys Res, Planets 128:e2022JE007616. https://doi.org/10.1029/2022JE007616
Murdoch N, Kenda B, Kawamura T et al. (2017a) Estimations of the seismic pressure noise on Mars determined from large Eddy simulations and demonstration of pressure decorrelation techniques for the insight mission. Space Sci Rev 211(1–4):457–483. https://doi.org/10.1007/s11214-017-0343-y
Murdoch N, Mimoun D, Garcia RF et al. (2017b) Evaluating the wind-induced mechanical noise on the InSight seismometers. Space Sci Rev 211(1–4):429–455. https://doi.org/10.1007/s11214-016-0311-y
Murdoch N, Spiga A, Lorenz R et al. (2021) Constraining Martian regolith and vortex parameters from combined seismic and meteorological measurements. J Geophys Res, Planets 126(2):e2020JE006410
Murdoch N, Stott AE, Mimoun D et al. (2023) Investigating diurnal and seasonal turbulence variations of the Martian atmosphere using a spectral approach. Planet Sci J 4:222. https://doi.org/10.3847/PSJ/ad06a9
Nakamura Y, Anderson DL (1979) Martian wind activity detected by a seismometer at Viking Lander 2 site. Geophys Res Lett 6(6):499–502. https://doi.org/10.1029/GL006i006p00499
Panning MP, Lorenz R, Shiraishi H et al. (2020) Seismology on Titan: a seismic signal and noise budget in preparation for Dragonfly. In: SEG technical program expanded abstracts, pp 3539–3542. https://doi.org/10.1190/segam2020-3426937.1
Panning M, Kedar S, Bowles N et al (2022) Farside Seismic Suite (FSS): First-ever seismology on the farside of the Moon and a model for long-lived lunar science. Europlanet Science Congress 2022, Granada, Spain, 18–23 Sep 2022, EPSC2022-672. https://doi.org/10.5194/epsc2022-672
Pou L, Nimmo F, Lognonné P et al. (2021) Forward modeling of the Phobos tides and applications to the first Martian year of the InSight mission. Earth Space Sci 8:e2021EA001669. https://doi.org/10.1029/2021EA001669
Scholz JR, Widmer-Schnidrig R, Davis P et al. (2020) Detection, analysis, and removal of glitches from InSight’s seismic data from Mars. Earth Space Sci 7(11):e2020EA001317. https://doi.org/10.1029/2020EA001317
Smrekar SE, Lognonné P, Spohn T et al. (2019) Pre-mission InSights on the Interior of Mars. Space Sci Rev 215:3. https://doi.org/10.1007/s11214-018-0563-9
Sorrells GG (1971) A preliminary investigation into the relationship between long-period seismic noise and local fluctuations in the atmospheric pressure field. Geophys J R Astron Soc 26(1–4):71–82. https://doi.org/10.1111/j.1365-246X.1971.tb03383.x
Spiga A, Banfield D, Teanby NA et al. (2018) Atmospheric Science with InSight. Space Sci Rev 214:109. https://doi.org/10.1007/s11214-018-0543-0
Spohn T, Hudson TL, Witte L et al. (2022) The InSight-HP3 mole on Mars: lessons learned from attempts to penetrate to depth in the Martian soil. Adv Space Res 69(8):3140–3163. https://doi.org/10.1016/j.asr.2022.02.009
Stoica P, Moses RL et al. (2005) Spectral analysis of signals. Pearson Prentice Hall, Upper Saddle River
Stott AE, Charalambous C, Warren TJ et al. (2021) The site tilt and lander transfer function from the short-period seismometer of insight on Mars. Bull Seismol Soc Am 111(6):2889–2908
Temel O, Senel CB, Spiga A et al (2022) Spectral analysis of the Martian atmospheric turbulence: InSight observations. Geophys Res Lett 49(15). https://doi.org/10.1029/2022GL099388
Trebi-Ollennu A, Kim W, Ali K et al. (2018) InSight Mars lander robotics instrument deployment system. Space Sci Rev 214:93. https://doi.org/10.1007/s11214-018-0520-7
Viúdez-Moreiras D, de la Torre M, Gómez-Elvira J et al. (2022) Winds at the Mars 2020 landing site. 2. Wind variability and turbulence. J Geophys Res, Planets 127(12):e2022JE007523
Wielandt E (2009) Seismic sensors and their calibration. In: Bormann P (ed) IASPEI new manual of seismological observatory practice. Deutsches GeoForschungsZentrum GFZ, Potsdam. https://doi.org/10.2312/GFZ.NMSOP-2_ch5. Chap. 5
Acknowledgements
This study benefited from the financial support of the Centre National d’Études Spatiales (CNES) and ISAE-SUPAERO. AS acknowledges funding from the CNES Postdoctoral fellowship. This work was performed in part at the Jet Propulsion Laboratory, California Institute of Technology under a grant from the National Aeronautics and Space Administration (80NM0018D0004). LP was supported by appointments to the NASA Postdoctoral Program at the NASA Jet Propulsion Laboratory, California Institute of Technology, administered by Oak Ridge Associated Universities under contract with NASA. Thanks to Charles Yana (CNES) and Emilien Gaudin (Telespazio) for providing the list of VBB and TCDM operations. Thanks to Nicolas Verdier (CNES) for our discussions on the thermal noise of the VBB. We acknowledge NASA, CNES, their partner agencies and Institutions (UKSA, SSO, DLR, JPL, IPGP-CNRS, ETHZ, IC, MPS-MPG) and the flight operations team at JPL, SISMOC, MSDS, IRIS-DMC and PDS for providing SEED SEIS data. This is InSight Contribution Number 314.
Author information
Authors and Affiliations
Corresponding author
Ethics declarations
Competing Interests
The authors declare that they have no conflict of interest.
Additional information
Publisher’s Note
Springer Nature remains neutral with regard to jurisdictional claims in published maps and institutional affiliations.
B. Banerdt is retired.
Note by the Editor: This is a Special Communication linked to the topic collection on the InSight mission published in Space Science Reviews. In addition to invited review papers and topical collections, Space Science Reviews publishes unsolicited Special Communications. These are papers linked to an earlier topical volume/collection, report-type papers, or timely papers dealing with a strong space-science-technology combination (such papers summarize the science and technology of an instrument or mission in one paper).
Appendices
Appendix A: Minor Contributors Unchanged from Mimoun et al. (2017)
The self noise and the acquisition noise are modelled the same way as in (Mimoun et al. 2017). They are shown on Fig. 18 for the self noise and Fig. 19 for the acquisition noise. Some of the noise at night is at the self noise level.

Self noise model, printed over the measured seismic noise, shown as a Probabilistic Amplitude Spectral Density, divided into day (6 a.m. - 6 p.m. LTST, a, b) and night (6 p.m. - 6 a.m. LTST, c, d) and horizontal (a, c) and vertical (b, d) components. The color indicates the probability density of the mission noise over the selected (vertical) frequency bin; the red color corresponds to a 1.5% probability density, while the dark blue is a 0% probability density. The self noise model is shown in a solid white line

Acquisition noise model, printed over the measured seismic noise, shown as a Probabilistic Amplitude Spectral Density, divided into day (6 a.m. - 6 p.m. LTST, a, b) and night (6 p.m. - 6 a.m. LTST, c, d) and horizontal (a, c) and vertical (b, d) components. The color indicates the probability density of the mission noise over the selected (vertical) frequency bin; the red color corresponds to a 1.5% probability density, while the dark blue is a 0% probability density. The acquisition noise model is shown in a solid white line
Appendix B: Comparison Between Environment Assumptions from Mimoun et al. (2017) and Measurements
This appendix compares the actual environment characteristics spectral measurements by InSight to the models of Mimoun et al. (2017). The magnetic field assumptions are shown on Fig. 20, the wind speed squared on Fig. 21 and the temperature inside the WTS is shown on Fig. 22.

Comparison between the measured magnetic field (background, in color) and the assumptions from Mimoun et al. (2017) in white lines. For this figure and the following ones, the solid line is for the median model, the dashed one is for the \(1\sigma \) model, and the dotted line show the \(3\sigma \) model

Comparison between the measured wind speed squared (background, in color) and the assumptions from Mimoun et al. (2017) in white lines

Comparison between the SCIT, which measures the temperature inside the WTS (background, in color) and the assumptions from Mimoun et al. (2017) in white lines
The differences between the SCIT and the assumptions from Mimoun et al. (2017) can be explained by Fig. 23, which shows that the first order low-pass filter model of the WTS is insufficient. In particular, the slope and amplitude of the SCIT is not fitted well by the atmospheric temperature filtered by a modelled WTS.

Atmospheric temperature ASD (blue), and atmospheric temperature filtered by the WTS first-order lowpass filter model (dashed yellow), compared to the ASD of the SCIT (red)
Appendix C: Environment Parameters Detailed Assumptions
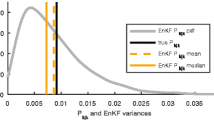
3.1 C.1 Wind Probabilistic ASD
The ASD of the wind speed squared is computed for all the mission duration (using TWINS data at 1 sample per second, via a Welch’s power spectral density estimate algorithm with a 10-minute long Hamming window and \(50\%\) overlap, see Sect. 2). A bimodal Gaussian distribution is fitted to the data, for each frequency bin. Figure 24 shows a vertical cut through the probabilistic ASD of Fig. 6, at frequency \(4.4\times10^{-2} \text{ Hz}\), i.e. the distribution of the wind speed squared ASD values for the frequency bin at \(4.4\times10^{-2} \text{ Hz}\).

Distribution of the wind speed squared ASD, for day (a) and for night (b), and fits with a bimodal distribution. The frequency for this plot is \(4.4\times10^{-2} \text{ Hz}\) (see text for details)
3.2 C.2 Wind Speed
The wind speed on Mars is often modelled with a Weibull distribution (Lorenz 1996). Figure 25 shows the statistics of the wind speed as measured by the TWINS instrument, and the fitted Weibull distribution for day and night, with the median and \(\pm 1 \sigma \) values. The parameters of the fitted Weibull distribution are coherent with those found by Viúdez-Moreiras et al. (2022), as shown in Table 9. The differences are most likely due to the different datasets used (different start and end times and data selection), but the overall values and evolution with local time remain consistent.

Distribution of the wind speed, for day (a) and for night (b), and fits with a Weibull distribution
3.3 C.3 Wind Direction
Figure 26 shows the statistics of the wind direction as measured by the TWINS instrument. The highest peak has been chosen for each period for the lander noise calculation. A more complex model could take into account the variation of angle with each hour and throughout the year, but this was not included in this work since it is more advanced than what was done in Mimoun et al. (2017).

Distribution of the wind direction, for day (a) and for night (b)
3.4 C.4 Ground Structure and Compliance
Figure 27 shows the ground structure used for the modelling of the pressure noise and the lander noise. The structure below the surface is extracted from Carrasco et al. (2023). From this structure, we model the horizontal and vertical compliance below, as well as the tilt compliance entering in the computation of the horizontal pressure noise (Fig. 28).

Ground structure below InSight. The crosses at 0 m depth are the HP3 hammering experiment measurements at the surface, used for the lander noise

Compliance modelled from the ground structure
Appendix D: Probability Distributions of the Measured Noise and Some Noise Sources at 0.1 Hz and 0.9 Hz
In order to have a better picture of the measured noise and the modelled noise, we plot a vertical cut through the probabilistic ASD of Fig. 2 for two frequencies, showing the probability distribution of the noise sources and the histogram of the noise. The two selected frequencies are 0.1 Hz and 0.9 Hz (and not 1 Hz to avoid the tick noise). We model the noise sources as Gaussian distributions, but this is only an approximation: the computations in the model only estimate the median and \(\pm 1 \sigma \) for each noise source, not the full distribution. We show the results in Figs. 29, 30, 31 and 32 for each component and day and night.

Histogram of the horizontal daytime measured noise in grey bars for two frequencies, 0.1 Hz (left) and 0.9 Hz (right). This corresponds to a vertical cut through the probabilistic ASD of Fig. 2. Over the histogram are shown the models of some noise sources and the full noise at the frequencies studied. The distributions chosen there are Gaussian distributions with the same median and \(\pm 1 \sigma \) as the modelled noise, although it only is an approximation of the actual noise distribution. The probability density has been normalized to a maximum of 1 for each noise for clarity. Values of ASD below \(10^{-10}~\text{m}\,\text{s}^{-2}\,\text{Hz}^{-0.5}\) are shown to include the magnetic field noise but are non-physical because they are below the acquisition noise

Histogram of the horizontal nighttime measured noise in grey bars for two frequencies, 0.1 Hz (left) and 0.9 Hz (right). This corresponds to a vertical cut through the probabilistic ASD of Fig. 2. Over the histogram are shown the models of some noise sources and the full noise at the frequencies studied. The distributions chosen there are Gaussian distributions with the same median and \(\pm 1 \sigma \) as the modelled noise, although it only is an approximation of the actual noise distribution. The probability density has been normalized to a maximum of 1 for each noise for clarity. Values of ASD below \(10^{-10}~\text{m}\,\text{s}^{-2}\,\text{Hz}^{-0.5}\) are shown to include the magnetic field noise but are non-physical because they are below the acquisition noise

Histogram of the vertical daytime measured noise in grey bars for two frequencies, 0.1 Hz (left) and 0.9 Hz (right). This corresponds to a vertical cut through the probabilistic ASD of Fig. 2. Over the histogram are shown the models of some noise sources and the full noise at the frequencies studied. The distributions chosen there are Gaussian distributions with the same median and \(\pm 1 \sigma \) as the modelled noise, although it only is an approximation of the actual noise distribution. The probability density has been normalized to a maximum of 1 for each noise for clarity. Values of ASD below \(10^{-10}~\text{m}\,\text{s}^{-2}\,\text{Hz}^{-0.5}\) are shown to include the magnetic field noise but are non-physical because they are below the acquisition noise

Histogram of the vertical nighttime measured noise in grey bars for two frequencies, 0.1 Hz (left) and 0.9 Hz (right). This corresponds to a vertical cut through the probabilistic ASD of Fig. 2. Over the histogram are shown the models of some noise sources and the full noise at the frequencies studied. The distributions chosen there are Gaussian distributions with the same median and \(\pm 1 \sigma \) as the modelled noise, although it only is an approximation of the actual noise distribution. The probability density has been normalized to a maximum of 1 for each noise for clarity. Values of ASD below \(10^{-10}~\text{m}\,\text{s}^{-2}\,\text{Hz}^{-0.5}\) are shown to include the magnetic field noise but are non-physical because they are below the acquisition noise
Appendix E: Noise Before Deployment of the Wind and Thermal Shield
The VBB measurements before the deployment of the Wind and Thermal Shield allow to characterise the noise without the WTS, and therefore generated by the wind drag on the seismometer. There are a few caveats to the comparison to the noise for the full mission which has been done on Fig. 33: first of all, the different instrument mode used (the instrument is in engineering mode before the WTS installation and scientific mode after that, with a different self noise); also, there are fewer data before the installation of the WTS, and the data are not continuously recorded throughout the day.

Noise measured before the deployment of the Wind and Thermal Shield, as measured by the VBBs in Engineering mode. The day and night noise have been merged. The noise during the day after the deployment of the WTS is shown in white lines (solid lines for the mean noise, dashed lines for \(\pm 1 \sigma \). (a) shows the noise on the horizontal components and (b) the noise on the vertical. The drop at frequencies lower than \(10^{-2}\text{ Hz}\) is due to filtering in post-processing
Rights and permissions
Springer Nature or its licensor (e.g. a society or other partner) holds exclusive rights to this article under a publishing agreement with the author(s) or other rightsholder(s); author self-archiving of the accepted manuscript version of this article is solely governed by the terms of such publishing agreement and applicable law.
About this article

Cite this article
Pinot, B., Mimoun, D., Murdoch, N. et al. The In Situ Evaluation of the SEIS Noise Model. Space Sci Rev 220, 26 (2024). https://doi.org/10.1007/s11214-024-01056-3
Received:
Accepted:
Published:
DOI: https://doi.org/10.1007/s11214-024-01056-3