
Abstract
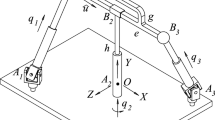
Recursive matrix relations for kinematics and dynamics of the HALF parallel manipulator are presented in this paper. The prototype of this robot is a spatial mechanism with revolute actuators, which has two translation degrees of freedom and one rotation degree of freedom. The parallel manipulator consists of a base plate, a movable platform and a system of three connecting legs, having wide application in the fields of industrial robots, simulators, parallel machine tools and any other manipulating devices where high mobility is required. Supposing that the position and the motion of the moving platform are known, an inverse dynamics problem is solved using the principle of virtual powers. Finally, some iterative matrix relations and graphs of the torques and powers for all actuators are analysed and determined. It is shown that this approach is an effective means for kinematics and dynamics modelling of parallel mechanisms.
Similar content being viewed by others

Abbreviations
- a k,k−1 :
-
& orthogonal transformation matrix
- a=Q T :
-
General transformation matrix of moving platform
- ⇁ u1 ,⇁ u2 ,⇁ u3 :
-
three orthogonal unit vectors
- α:
-
angle of initial inclination of upper arm of three legs
- ϕ k,k−1 :
-
relative rotation angle of T k rigid body
- ⇁ ω k,k - 1 :
-
relative angular velocity of T k
- ⇁ ω k0 :
-
absolute angular velocity of T k
- ~ω k,k - 1 :
-
skew-symmetric matrix associated to the angular velocity ⇁ ω k,k - 1
- ⇁ ε k,k - 1 :
-
relative angular acceleration of T k
- ⇁ ε k0 :
-
absolute angular acceleration of T k
- ~ε k,k - 1 :
-
skew-symmetric matrix associated to the angular acceleration ⇁ ε k,k - 1 $
- ⇁ rk,k - 1 A :
-
relative position vector of the centre of A k joint
- ⇁ vk,k - 1 A :
-
relative velocity of the centre A k
- ⇁ γ k,k - 1 A :
-
relative acceleration of the centre A k
- m k :
-
mass of T k rigid body
- Ĵk :
-
symmetric matrix of tensor of inertia of T k about the link-frame A kxkykzk
- J 1, J 2 :
-
two Jacobian matrices of the manipulator
- m A 10, m B 10, m C 10 :
-
torques of three actuators pointing about the A 1 z A 1, B 1 z B 1, C 1 z C 1 directions
References
Reboulet, C., Pigeyre, R.: Hybrid control of a 6-DOF in-parallel actuated micro-manipulator mounted on a Scara robot. In: Proceedings of the International Symposium on Robotics and Manufacturing: Research, Education and Applications, pp. 293–298, Burnaby, Canada (1990)
Valenti, M.: Machine tools get smarter. ASME Mech. Eng. 17, 70–75 (1995)
Cleary, K., Brooks, T.: Kinematics analysis of a novel 6-DOF parallel manipulator. In: Proceedings of the IEEE International Conference on Robotics and Automation, Atlanta, Georgia, USA, pp. 708–713, TX (1993)
Hudgens, J., Tesar, D.: A fully-parallel six degree-of-freedom micromanipulator: kinematics analysis and dynamic model. In: Proceedings of the 20th Biennial ASME Mechanisms Conference, Kissimmee, Orlando, FL, Vol. 15(3), pp. 29–38 (1988)
Romiti, A., Sorli, M.: A parallel 6-DOF manipulator for cooperative work between robots in deburring. In: Proceedings of the 23rd International Symposium on Industrial Robots, pp. 437–442, Barcelona, Spain (1992)
Zhang, D.: Kinetostatic Analysis and Optimization of Parallel and Hybrid Architectures for Machine Tools. Ph.D. Thesis, Laval University, Canada (2000)
Oh, K.-K., Liu, X.-J., Kang, D.S., Kim, J.: Optimal design of a micro parallel positioning platform. Part II: Real Machine Design. Robotica 23, 109–122 (2005)
Husty, M.L.: An algorithm for solving the direct kinematics of the Stewart–Gough platforms. Mech. Mach. Theory 31, 365–379 (1996)
Parenti-Castelli, V., Di Gregorio, R.: A new algorithm based on two extra-sensors for real-time computation of the actual configuration of generalized Stewart–Gough manipulator. J. Mech. Des. 122, 294–298 (2000)
Stewart, D.: A platform with six degrees of freedom. Proc. Inst. Mech. Eng. 180, 371–386 (1965)
Wohlhart, K.: Displacement analysis of the general spherical Stewart platform. Mech. Mach. Theory 29, 581–589 (1994)
Hervé, J.M.: Group mathematics and parallel link mechanisms. In: Proceedings of IMACS/SICE International Symposium on Robotics, Mechatronics, and Manufacturing Systems, pp. 459–464, Kobe, Japan (1992)
Clavel, R.: DELTA: a fast robot with parallel geometry. In: Proceedings of the 18th International Symposium on Industrial Robot, pp. 91–100, Sydney, Australia, April (1988)
Staicu, S., Carp-Ciocardia, D.C.: Dynamic analysis of Clavel’s Delta parallel robot. In: Proceedings of the IEEE International Conference on Robotics & Automation, pp. 4116–4121, Taipei, Taiwan (2003).
Tsai, L-W. (ed.): Robot Analysis: The Mechanics of Serial and Parallel Manipulator. Wiley, New York (1999)
Tsai, L.W., Stamper, R.: A parallel manipulator with only translational degrees of freedom. In: Proceedings of the ASME 96-DETC-MECH-1152, Irvine, CA (1996)
Li, Y.-W., Wang, J., Wang, L.-P., Liu, X.-J.: Inverse dynamics and simulation of a 3-DOF spatial parallel manipulator. In: Proceedings of the IEEE International Conference on Robotics & Automation, pp. 4092–4097, Taipei, Taiwan (2003)
Zaganech, R., Sinatra, R., Angeles, J.: Kinematics and dynamics of a six-degrees-of-freedom parallel manipulator with revolute legs. Robotica 15, 385–394 (1997)
Kane, T.R., Levinson, D.A. (eds.): Dynamics: Theory and Applications, McGraw-Hill, New York (1985)
Sorli, M., Ferarresi, C., Kolarski, M., Borovac, B., Vucobratovic, M.: Mechanics of Turin parallel robot. Mech. Mach. Theory 32, 51–77 (1997)
Geng, Z., Haynes, L.S., Lee, J.D., Carroll, R.L.: On the dynamic model and kinematics analysis of a class of Stewart platforms. Robot. Auton. Syst. 9, 237–254 (1992)
Dasgupta, B., Mruthyunjaya, T.S.: A Newton–Euler formulation for the inverse dynamics of the Stewart platform manipulator. Mech. Mach. Theory 34, 711–725 (1998)
Wang, J., Liu, X.-J.: Analysis of a novel cylindrical 3-DoF parallel robot. Robot. Auton. Syst. 42, 31–46 (2003)
Liu, X.-J., Tang, X., Wang, J.: HANA: a novel spatial parallel manipulator with one rotational and two translational degrees of freedom. Robotica 23(2), 257–270 (2005)
Merlet, J.-P. (ed.): Parallel Robots. Kluwer, Norwell, MA (2000)
Angeles, J. (ed.): Fundamentals of Robotic Mechanical Systems: Theory, Methods and Algorithms. Springer-Verlag, Berlin (2002)
Staicu, S. (ed.): Mecanica Teoretica. Didactica & Pedagogica Publishing House, Bucharest, Romania (1998)
Staicu, S., Zhang, D., Rugescu, R.: Dynamic modelling of a 3-DOF parallel manipulator using recursive matrix relations. Robotica 24(1), 125–130 (2006)
Staicu, S.: Planetary gear train for robotics. In: Proceedings of the IEEE International Conference on Mechatronics ICM’2005, Taipei, Taiwan, pp. 840–845 (2005)
Liu, X.-J., Wang, J., Gao, F., Wang, L.-P.: On the analysis of a new spatial three degrees of freedom parallel manipulator. IEEE Trans. Robot. Autom. 17(6), 959–968 (2001)
Gosselin, C.M., Angeles, J.: Singularity analysis of closed loop kinematics chains. IEEE Trans. Robot. Autom. 6(3), 281–290 (1990)
Guegan, S., Khalil, W., Chablat, D., Wenger, P.: Modélisation dynamique d’un robot parallèle à 3-DDL: l’Orthoglide. In: Conférence Internationale Francophone d’Automatique, 8–10 Juillet, Nantes, France (2002)
Zhang, C.-D., Song, S.-M.: An efficient method for inverse dynamics of manipulators based on virtual work principle. J. Robot. Syst. 19(5), (1999)
Staicu, S.: Méthodes matricielles en dynamique des mécanismes. In: Scientific Bulletin, Series D, Mechanical Engineering, Vol. 62(3). University “Politehnica” of Bucharest, Romania (2000)
Author information
Authors and Affiliations
Corresponding author
Rights and permissions
About this article
Cite this article
Staicu, S., Liu, XJ. & Wang, J. Inverse dynamics of the HALF parallel manipulator with revolute actuators. Nonlinear Dyn 50, 1–12 (2007). https://doi.org/10.1007/s11071-006-9138-5
Received:
Accepted:
Published:
Issue Date:
DOI: https://doi.org/10.1007/s11071-006-9138-5