
Abstract
A new method is presented for the self-noise estimation of a seismometer using a single, side-by-side, reference instrument and taking into consideration the misalignment in the orientation of both seismometers. The self-noise of seismometers is extracted directly from the measurements without using any information relating to the transfer functions. This procedure can be applied if the self-noise of the reference seismometer is well known and defined, or if the self-noise of the reference seismometer is sufficiently below the self-noise of the tested instrument and can be neglected. The latter case applies to this study. An algorithm is also developed where we apply self-noise data in order to determine the orientation misalignment between two seismometers, which is then resolved in three-dimensional space. This new method provides an estimate of the self-noise and can also be used to extract some parameters of the installed seismic system in comparison with the reference seismic system, such as generator constants and seismometer orientation or to eliminate unwanted noise sources, which have their origin in the seismic station’s design. The new technique was applied to the CMG-3ESPC and CMG-40T seismometers, where an STS-2 instrument served as the reference seismometer.






Similar content being viewed by others

Abbreviations
- NLNM:
-
New low-noise model
- NHNM:
-
New high-noise model
- USGS:
-
U. S. Geological Survey
- PSD:
-
Power spectral density
- 1D:
-
One dimensional
- 3D:
-
Three dimensional
- E–W:
-
East–west
- N–S:
-
North–south
- ZAMG:
-
Central Institute for Meteorology and Geodynamics
References
Evans JR, Followill F, Hutt CR, Kromer RP, Nigbor RL, Ringler AT, Steim JM, Wielandt E (2010) Method for calculating self-noise spectra and operating ranges for seismographic inertial sensors and recorders. Seismol Res Lett 81(4):640–646
Hart D, Merchant B, Chael E (2007) Seismic and infrasound sensor testing using three-channel coherence analysis, in 29th monitoring research review: ground-based nuclear explosion monitoring technologies. LA-UR-07-5613: 935–944
Heath TM (2002) Scientific computing, an introductory survey, 2nd edn. McGraw-Hill, New York
Holcomb GL (1989) A direct method for calculating instrument noise levels in side-by-side seismometer evaluations. Open-file report 89–214, U. S. Geological Survey
Holcomb GL (1990) A numerical study of some potential sources of error in side-by-side seismometer evaluations. Open-file report 90–406, U. S. Geological Survey
Holcomb GL (2002) Experiments in seismometer azimuth determination by comparing the sensor signal outputs with the signal output of an oriented sensor. Open-File Report 02–183, U. S. Geological Survey
Hutt RC, Evans RJ, Followill F, Nigbor LR, Wielandt E (2009) Guidelines for standardized testing of broadband seismometers and accelerometers. Open-File Report 2009–1295, U. S. Geological Survey
Pavlis GL, Vernon FL (1994) Calibration of seismometers using ground noise. Bull Seism Soc Am 84(4):1243–1255
Peterson J (1993) Observations and modeling of background seismic noise. Open-file report 93–322, U. S. Geological Survey
Proakis JG, Manolakis DG (1989) Introduction to digital signal processing. Macmillan Publishing Company, New York
Sleeman R, van Wettum A, Trampert J (2006) Three-channel correlation analysis: a new technique to measure instrumental noise of digitizers and seismic sensors. Bull Seism Soc Am 96(1):258–271
Wielandt E (2002) UNICROSP. In: Borman P (ed) New manual of seismological observatory practice. Volume 2, Annexes, GeoForschungsZentrum, Potsdam:PD 5.7,1–2
Acknowledgments
We thank the Slovenian Environment Agency (ARSO), the Central Institute for Meteorology and Geodynamics (ZAMG), and Network of Research Infrastructures for European Seismology Project (NERIES; EU—Contract No:026130) for making possible the measurements at the Conrad Observatory. This work has been, in part, financed by the Slovenian Research Agency (ARRS) through the research program Geotechnology (P O − 0268). The authors would like to express their gratitude to both reviewers for their constructive and useful comments and advice.
Author information
Authors and Affiliations
Corresponding author
Appendix
Appendix
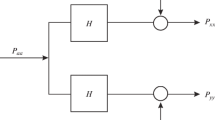
We have two three-component seismological systems, each consisting of a broadband seismometer and an analogue-to-digital converter (or an acquisition unit). The first is marked with the index ‘q’, and the second with the index ‘r’. We assume that the transfer functions for both systems are flat inside of their respective bandwidth, noise-independent, and the instrumental noise of the acquisition units is lower than that of the seismometers. Those axes in both seismological systems are not ideally perpendicular to each other (Fig. 7) and also their gains are not the same. The seismometers are not perfectly aligned with each other in the same direction, even if we try to do our best (Holcomb 2002). Because of misalignment errors the signals between the two seismological systems are not purely coherent (Holcomb 1990). To achieve coherency, the data from system ‘r’ need to be transformed into system ‘q’ to detect the same seismic signal. A matrix A represents such a transformation:

The sensors of the system ‘q’ lie on the axis of a coordinate system. Sensors in the system ‘r’ are not aligned equal to the system ‘q’
Usually, \( \left| {\det ({\mathbf{A}})} \right| \ne 1 \): the matrix A includes both rotation and a scaling factor (the ratio of the generator constants) of one seismometer with respect to the other. In the procedure where we use two seismic systems close to each other these matrices are not de facto known. To determine the parameters of the matrix A, the self-noise of the seismometers can be used. In a three-dimensional coordinate system the ‘i’-th sensor of system ‘q’ lies on the axis of the ‘i’-th coordinate system, where i = 1,2,3, (Fig. 7). With the direction ‘i’, the sensor ‘i’ of the seismic system ‘q’ detects the seismic signal ‘x i’ and the instrumental noise ‘ni’:
Similarly, the signal of the system ‘r’ in the direction ‘i’ is a linear combination of all three outputs:
where a i1, a i2, and a i3 are the elements of the transformation matrix A for the component ‘i’ and \( n_{\text{j}}^{\text{r}} \); j = 1,2,3 is the instrumental noise of the component ‘j’ of the seismic system ‘r’. The notations of Eqs. 17 and 18 in the frequency domain are:
where \( Y_{\text{i}}^{\text{r}} \), \( Y_{\text{i}}^{\text{q}} \), \( X_{\text{i}} \), \( N_{\text{i}}^{\text{r}} \) and \( N_{\text{i}}^{\text{q}} \) represent the Fourier transforms of \( y_{\text{i}}^{\text{r}} \), \( y_{\text{i}}^{\text{q}} \), \( x_{\text{i}} \), \( n_{\text{i}}^{\text{r}} \) and \( n_{\text{i}}^{\text{q}} \). We assume that the instrumental noise between the outputs of the seismic systems is uncorrelated and the self-noise and the input seismic signal xi are also uncorrelated. Assuming that the system is linear and the outputs from both seismic systems in the direction ‘i’ can be written using the power spectral density:
where * denotes the complex conjugation. \( {{\text{P}}_{{{x_i}{x_i}}}} = {X_i}X_i^{*} \) is the autopower spectrum (Sleeman et al. 2006) of the seismic input signal (ground motion) in the direction ‘i’ and \( {{\text{N}}_{{{{\text{q}}_i}{{\text{q}}_i}}}} = N_{\text{i}}^{\text{q}}N_{\text{i}}^{{{\text{q*}}}} \) and \( {{\text{N}}_{{{{\text{r}}_i}{{\text{r}}_i}}}} = N_{\text{i}}^{\text{r}}N_{\text{i}}^{{{\text{r}}*}} \) are the autopower spectra of the instrumental noise. The cross-power spectrum \( {{\text{P}}_{{{{\text{r}}_i}{{\text{q}}_i}}}} \)is simply:
Using Eqs. 21, 22 and 23 we can apply the “average” instrumental noise power spectra \( {\overline {\text{N}}_{\text{ii}}} \) (Eq. 13) in the direction ‘i’ as a function of the frequency ‘v p ’ and the parameters a i1, a i2 and a i3 as:
To find the parameters a i1, a i2 and a i3, by which the contribution of the ground motion \( {{\text{P}}_{{{x_i}{x_i}}}} \) in the direction ‘i’ from both seismometers at the right-hand side of Eq. 24 are canceled out, is one of our aims. The values a i1, a i2 and a i3 can be estimated by using non-linear least-squares data fitting and the Gauss–Newton method. Let us define the frequency v p and the interval 2n around this frequency: [p−n, p + n]. The residual vector (Heath 2002) in the direction ‘i’ at this frequency interval is:
The function S(v) is a synthetic trace and represents the ideal instrumental noise. This function is usually not known. Instead of this, the synthetic trace can be formulated according to the lowest expected self-noise value. If the frequency interval is short enough, and if the self-noise is the lowest in this frequency band, zero values can be used instead. The initial guess for the initial parameters is set in the direction of the ideal orientation and the alignment of the reference seismometer, so the initial parameters are \( {a_{{{1}1}}} = {a_{{{22}}}} = {a_{{{33}}}} = 1 \) and 0 otherwise. Using the first approximate solution, a new approximate solution is computed based on local linearization around the current point using the Jacobian matrix of the residual vector. This process is repeated until convergence is achieved. When the residual obtains its minimum, the values of the parameters a i1, a i2 and a i3 represent the optimal solution for the transformation matrix. The parameters are in good agreement with available observations. This approach is a power-based method and, theoretically, produces two possible estimates for each component, because the analysis does not retain the information about the phase (Holcomb 2002). But a close inspection of the evaluated results shows that the vast majority of the evaluated parameters are as expected. The reason is that the orientation of the reference seismometer is mostly known, the vertical component of the tested system is usually set similar to the reference system and the initial parameters are set with regard to the vertical component. When the parameters of the matrix A are determined, the seismic signal of the reference seismological system can be transformed into the seismic signal of the tested seismological system, without any a priori knowledge of the gain constant and of the rotation of the tested seismometer. This procedure can also be performed to define the orientation of the borehole seismometer with regard to the surface seismometer.
Figure 8 depicts the evaluated transformation matrices of a CMG-3ESPC seismometer (s/n T34238) and a STS-2 seismometer (s/n 80448) and the evaluated transformation matrices of a CMG-40T seismometer (s/n T4B19) and a STS-2 seismometer (s/n 80448). The seismometers were installed side by side. The calculated self-noises for both seismometers and for both models are depicted in Figs. 9 and 10, where the self-noise was calculated using Eq. 9 without any information about the reference system’s self-noise. The tests were performed at Conrad Laboratory, Austria. In both cases the input is a 12-h finite-length-time seismic-data segment, sampled at 200 samples per second. For the power spectral density estimation, Welch’s method is used, using a Matlab(C) built-in function, with a Hanning window of length 216 and with 75% overlapping time-series segments. For both cases the transformation matrix for the 3D model was calculated in the frequency interval from 0.2 to 0.5 Hz.

Evaluated transformation matrices used in our article for the 3D model, correlating the tested and the reference seismometer

The estimated self-noise of the vertical component of a CMG-3ESPC seismometer (s/n T34238), using the 1D model (dotted line, marked N (1D model)) and the 3D model (N (3D model))

The estimated self-noise of the vertical component of a CMG-40T seismometer (s/n T4B19), using the 1D model (N (1D model)) and using the 3D model (N (3D model))
Rights and permissions
About this article
Cite this article
Tasič, I., Runovc, F. Seismometer self-noise estimation using a single reference instrument. J Seismol 16, 183–194 (2012). https://doi.org/10.1007/s10950-011-9257-4
Received:
Accepted:
Published:
Issue Date:
DOI: https://doi.org/10.1007/s10950-011-9257-4