
Abstract
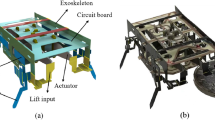
A 935 mg weight coin-size piezoelectric-driven wheeled robot with a flexible body-actuator-transmission integrated structure is presented in this paper. The robot is monolithic designed and fabricated via planar graphic manufacturing and lamination methods. The flexible four-bar mechanism and the flexible pawl-ratchet mechanism based on film hinge convert the slight vibration of the dual-drive PZT actuator into a unidirectional rotation of wheels, thereby achieving straight or curved motion. The stress and response of the flexible pawl-ratchet mechanism are analyzed by mechanical model and FEM simulation. We experimentally characterized the resonant characteristics of the actuator, measured the velocity of the miniature wheeled robot when it is on or off the ground. Experiments suggest that the prototype of the robot can achieve a linear speed for 330 mm/s, a turning radius for about 200 mm, and a climbing angle for 7.5°.











Similar content being viewed by others

References
Avadhanula S, Fearing R S (2005) Flexure design rules for carbon fiber microrobotic mechanisms. In: IEEE International Conference on Robotics and Automation (ICRA), pp 1579–1584
Hida H, Morita Y, Kurokawa F et al (2016) Simple millimeter-scale robot using Pb (Zr, Ti) piezoelectric thin film actuator on titanium substrate. Microsyst Technol 22:1429–1436
Jing W, Cappelleri D (2014) A magnetic microrobot with in situ forcesensing capabilities. Robotics 3:106–119
Ming A, Park S, Nagata Y, et al (2009) Development of underwater robots using piezoelectric fiber composite. In: IEEE International Conference on Robotics and Automation (ICRA), pp 3821–3826
Miyashita S, Guitron S, Ludersdorfer M, et al (2015) An untethered miniature origami robot that self-folds, walks, swims, and degrades. In: IEEE International Conference on Robotics and Automation (ICRA), pp 1490–1496
Moon YM, Trease BP, Kota S (2002) Design of large-displacement compliant joints. In: ASME Int Design Engineering Technical Conf and Computers and Information in Engineering Conference (IDETC/CIE), pp 65–76
Pham PH, Dang LB, Vu HN (2010) Micro robot system with moving micro-car driven by electrostatic comb-drive actuators. Microsyst Technol 16:505–510
Shibata M, Sakagami N (2015) Fabrication of a fish-like underwater robot with flexible plastic film body. Adv Robot 29:103–113
Song YS, Sitti M (2007) Surface-tension-driven biologically inspired water strider robots: theory and experiments. IEEE T Robot 23:578–589
Sreetharan PS, Whitney JP, Strauss MD et al (2012) Monolithic fabrication of millimeter-scale machines. J Micromech Microeng 22:055027
Wang H, Chen J, Lau HYK et al (2016) Motion planning based on learning from demonstration for multiple-segment flexible soft robots actuated by electroactive polymers. IEEE Robot Autom Lett 1:391–398
Wood RJ, Avadhanula S, Sahai R et al (2008) Microrobot design using fiber reinforced composites. J Mech Des 130:052304
Yeh R, Kruglick EJ, Pister KSJ (1996) Surface-micromachined components for articulated microrobots. J Microelectro Mech Syst 5:10–17
Zheng T, Yang Y, Branson D T, et al (2014) Control design of shape memory alloy based multi-arm continuum robot inspired by octopus. In: IEEE International Conference on Industrial Electronics and Applications (ICIEA) 1108–1113
Zou Y, Zhang W, Zhang Z (2016) Liftoff of an electro-magnetically driven insect-inspired flapping-wing Robot. IEEE T Robot 32:1285–1289
Zou Y, Zhang W, Ke X, et al (2017) The design and micro-fabrication of a sub 100 mg insect-scale flapping-wing robot. Micro Nano Lett 12:297–300
Acknowledgements
This research is supported by the Supporting Foundation of the Ministry of Education (6141A02022607), the New Century Excellent Talents Support Program from the Ministry of Education of China (NCET-10-0583), the Pre-research Fund (9140A26020 313JW03371, 9140A26020414JW03412) the Pre-research Project(LZY2016215, 010701) and Professional technical service platform of Shanghai (16DZ2290103).
Author information
Authors and Affiliations
Corresponding author
Ethics declarations
Conflict of interest
All authors declare that they have no conflict of interest.
Electronic supplementary material
Below is the link to the electronic supplementary material.
Supplementary material 1 (WMV 7885 kb)
Rights and permissions
About this article

Cite this article
Zhou, S., Zhang, W., Zou, Y. et al. Piezoelectric-driven miniature wheeled robot based on flexible transmission mechanisms. Microsyst Technol 24, 943–950 (2018). https://doi.org/10.1007/s00542-017-3424-7
Received:
Accepted:
Published:
Issue Date:
DOI: https://doi.org/10.1007/s00542-017-3424-7