
Abstract
Background
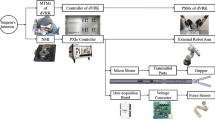
Current surgical robots are controlled by a mechanical master located away from the patient, tracking surgeon’s hands by wire and pulleys or mechanical linkage. Contactless hand tracking for surgical robot control is an attractive alternative, because it can be executed with minimal footprint at the patient’s bedside without impairing sterility, while eliminating current disassociation between surgeon and patient. We compared technical and technologic feasibility of contactless hand tracking to the current clinical standard master controllers.
Methods
A hand-tracking system (Kinect™-based 3Gear), a wire-based mechanical master (Mantis Duo), and a clinical mechanical linkage master (da Vinci) were evaluated for technical parameters with strong clinical relevance: system latency, static noise, robot slave tremor, and controller range. Five experienced surgeons performed a skill comparison study, evaluating the three different master controllers for efficiency and accuracy in peg transfer and pointing tasks.
Results
da Vinci had the lowest latency of 89 ms, followed by Mantis with 374 ms and 3Gear with 576 ms. Mantis and da Vinci produced zero static error. 3Gear produced average static error of 0.49 mm. The tremor of the robot used by the 3Gear and Mantis system had a radius of 1.7 mm compared with 0.5 mm for da Vinci. The three master controllers all had similar range. The surgeons took 1.98 times longer to complete the peg transfer task with the 3Gear system compared with Mantis, and 2.72 times longer with Mantis compared with da Vinci (p value 2.1e−9). For the pointer task, surgeons were most accurate with da Vinci with average error of 0.72 mm compared with Mantis’s 1.61 mm and 3Gear’s 2.41 mm (p value 0.00078).
Conclusions
Contactless hand-tracking technology as a surgical master can execute simple surgical tasks. Whereas traditional master controllers outperformed, given that contactless hand-tracking is a first-generation technology, clinical potential is promising and could become a reality with some technical improvements.






Similar content being viewed by others


References
Tsui C, Kelin R, Garabrant M (2013) Minimally invasive surgery: national trends in adoption and future directions for hospital strategy. Surg Endosc 27:2253–2257
Wetter PA, Kavic MS, Levinson CJ, Kelley WE, McDougall EM, Nezhat C (2005) Prevention and management of laparoendoscopic surgical complications, 2nd edn. Society of Laparoscopic Surgeons, Miami
Hartmann F, Schlaefer A (2013) Feasibility of touch-less control of operating room lights. Int J Comput Assist Radiol Surg 8:259–268. doi:10.1007/s11548-012-0778-2
Gallo L, Placitelli AP, Ciampi M (2011) Controller-free exploration of medical image data: experiencing the Kinect. IEEE Int Symp Comput Med Syst CBMS 70:1–6. doi:10.1109/CBMS.2011.5999138
Ruppert GC, Reis LO, Amorim PH, de Moraes TF, da Silva JV (2012) Touchless gesture user interface for interactive image visualization in urological surgery. World J Urol 30:687–691. doi:10.1007/s00345-012-0879-0
Jacob MG, Wachs JP, Packer RA (2013) Hand-gesture-based sterile interface for the operating room using contextual cues for the navigation of radiological images. J Am Med Inform Assoc. doi:10.1136/amiajnl-2012-001212
Van den Bergh M, Carton D, de Nijs R, Mitsou N, Landsiedel C, Kuehnlenz K, Wollherr D (2011) Real-time 3D hand gesture interaction with a robot for understanding directions from humans. IEEE RO-MAN pp 357–362 doi:10.1109/ROMAN.2011.6005195 July 31, 2011
Frati V, Prattichizzo D (2011) Using Kinect for hand tracking and rendering in wearable haptics. IEEE World Haptics Conf. WHC pp 317–321 doi:10.1109/WHC.2011.5945505 June 2011
Ren Z, Yuan J, Zhang Z (2011) Robust hand gesture recognition based on finger-earth mover’s distance with a commodity depth camera. IEEE Trans Multimed 15:1110–1120. doi:10.1109/TMM.2013.2246148
Oikonomidis I, Kyriazis N, Argyros A (2011) Efficient model-based 3D tracking of hand articulations using Kinect Proceedings of the British Machine Vision Conference. doi:10.5244/C.25.101, Sep 2011
Jacob MG, Li YT, Wachs JP (2011) A gesture driven robotic scrub nurse. Proceedings of the IEEE International Conference on Systems, Man, and Cybernetics, pp 2039–2044. doi:10.1109/ICSMC.2011.6083972, Oct 2011
Monnich H, Nicolai P, Beyl T, Raczkowsky J, Worn H (2011) A supervision system for the intuitive usage of a telemanipulated surgical robotic setup. IEEE Int Conf Robot Biomimetics ROBIO, pp 449–454 doi:10.1109/ROBIO.2011.6181327 Dec 2011
Badani KK, Bhandari A, Tewari A, Menon M (2005) Comparison of two-dimensional and three-dimensional suturing: Is there a difference in a robotic surgery setting? J Endourol 19(10):1212–1215. doi:10.1089/end.2005.19.1212
Lum MJ, Rosen J, King H, Friedman DC, Lendvay TS, Wright AS, Sinanan MN, Hannaford B (2009) Teleoperation in surgical robotics – network latency effects on surgical performance. Annu Int Conf IEEE Eng Med Biol Soc, Minneapolis, pp 6860–6863 doi:10.1109/IEMBS.2009.5333120, Sept 2009
Schneider CA, Rasband WS, Eliceiri KW (2012) NIH Image to ImageJ: 25 years of image analysis. Nat Methods 9:671–675. doi:10.1038/nmeth.2089
Acknowledgments
The authors thank Dr. Aaron Martin, Dr. Timothy Kane, Dr. Miller Hamrick, Dr. Craig Peters, Dr. Nora Lee, and Dr. Peter Kim for performing the surgical tasks.
Disclosures
Mr. Yonjae Kim and Drs. Simon Leonard, Azad Shademan, Axel Krieger, and Peter Kim have no conflicts of interest or financial ties to disclose.
Author information
Authors and Affiliations
Corresponding author
Rights and permissions
About this article
Cite this article
Kim, Y., Leonard, S., Shademan, A. et al. Kinect technology for hand tracking control of surgical robots: technical and surgical skill comparison to current robotic masters. Surg Endosc 28, 1993–2000 (2014). https://doi.org/10.1007/s00464-013-3383-8
Received:
Accepted:
Published:
Issue Date:
DOI: https://doi.org/10.1007/s00464-013-3383-8