
Access this chapter
Tax calculation will be finalised at checkout
Purchases are for personal use only
Abbreviations
- Evolving system :
-
In the context of this article the term ‘evolving’ is used in the sense of the self‐development of a system (in terms of both its structure and parameters) based on the stream of data coming to the system on‐line and in real‐time from the environment and the system itself. The system is assumed to be mathematically described by a set of fuzzy rules of the form:
$$ \begin{aligned} &\textit{Rule}^i\colon\\ &\textit{IF\enskip}(\textit{Input$_1$ is close to prototype$_1^i$})\\ &\textit{\enskip AND\enskip\dots\enskip AND\enskip}(\textit{Input$_n$ is close to prototype$_n^i$})\textit{\enskip}\\ &\textit{THEN\enskip}(\textit{Output$^i$}=\overline{\textit{Inputs}}^\textit{T}\enskip\textit{ConseqPara ms}) \\ \end{aligned} $$(1)In this sense, this definition strictly follows the meaning of the English word “evolving” as described in [34], p. 294, namely “unfolding; developing; being developed, naturally and gradually”. Contrast this to the definition of “evolutionary ” in the same source, which is “development of more complicated forms of life (plants, animals) from earlier and simpler forms”. The terms evolutionary or genetic are also associated with such phenomena (respectively operators that mimic these) as chromosome crossover, mutation,selection and reproduction, parents andoff‐springs [32]. Evolving (fuzzy and neuro‐fuzzy ) systems do not deal with such phenomena. They rather consider a gradual development of the underlying (fuzzy or neuro‐fuzzy) system structure.
- Fuzzy system structure :
-
Structure of a fuzzy (or neuro‐fuzzy) system is constituted of a set of fuzzy rules (1). Each fuzzy rule is composed of antecedent (IF) and consequents (THEN) parts. They are linguistically expressed. The antecedent part consists of a number of fuzzy sets that are linked with fuzzy logic aggregators such as conjunction, disjunction, more rarely, negation [43]. In the above example, a conjunction (logical AND) is used. It can be mathematically described by so‐called t‐norms or t‑conorms between membership functions. The most popular membership functions are Gaussian, triangular, trapezoidal [73]. The consequent part of the fuzzy rules in the so‐called Takagi–Sugeno (TS) form is represented by mathematical functions (usually linear). The structure of the TS fuzzy system can also be represented as a neural network with a specific (five layer) composition (Fig. 1). Therefore, these systems are also called neuro‐fuzzy (NF).
Figure 1 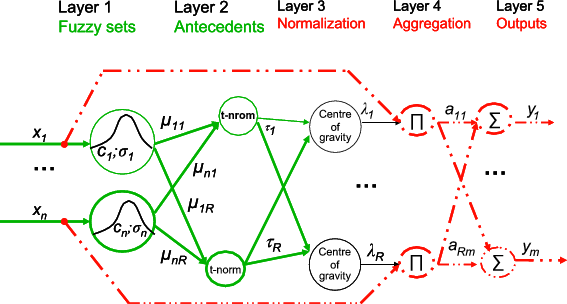
Structure of the (neuro‐fuzzy) system of TS type
The number of fuzzy rules and inputs (which in case of classification problems are also called features or attributes) is also a part of the structure.
The first layer consists of neurons corresponding to the membership functions of a wparticular fuzzy set. This layer takes the inputs, x and gives as output the degree, µ to which these fuzzy descriptors are satisfied. The second layer represents the antecedent parts of the fuzzy rules. It takes as inputs the membership function values and gives as output the firing level of the ith rule, τ i . The third layer of the network takes as inputs the firing levels of the respective rule, τ i and gives as output the normalized firing level, λ i as “center of gravity” [43] of τ i . As an alternative one can use the “winner takes all” operator. This operator is used usually in classification, while the “center of gravity” is preferred for time‐series prediction and general system modeling and control. The fourth layer aggregates the antecedent and the consequent part that represents the local sub‐systems (singletons or hyper planes). Finally, the last 5th layer forms the total output of the NF system. It performs a weighed summation of local sub‐systems.
- Fuzzy system parameters:
-
Parameters of the NF system of TS type include the center, c and spread, σ of the Gaussians or parameters of the triangular (or trapezoidal) membership functions. An example of a Gaussian type membership function can be given as:
$$ \mu =\text{e}^{-\frac{1}{2}\left( {\frac{d}{r}} \right)^2} $$(2)where d denotes distance between a data sample (point in the data space) and a prototype/cluster center (focal point of a fuzzy set); r is the radius of the cluster (spread of the membership function).
Note that the distance can be represented by Euclidean (the most typical example), Mahalonobis [33], cosine etc. forms.
These parameters are associated with the antecedent part of the system. Consequent part parameters are coefficients of the (usually) linear functions, singleton coefficients or coefficients of more complex functions (e. g. exponential) if such ones are used.
$$ y_{i}= a_{i0}+a_{i1}x_{1}+\dots+a_{in}x_{n} $$(3)where a denotes parameters of the consequent part; x denote the inputs (features); i is the index of the ith fuzzy rule; n is the number (dimensionality) of the inputs (features).
- Potential :
-
Potential is a mathematical measure of the data density. It is calculated at a data point, z and represents numerically the accumulated proximity (density) of the data surrounding this data point. It resembles the probability distribution used in so‐called Parzen windows [33] and is described in [26,72] by a Gaussian‐like function:
$$ P(z)=\text{e}^{-\frac{1}{2r}\overline \sigma^{2}} $$(4)where \( { z=[x,y] } \) denotes the joint (input/output) vector;
\( { \overline \sigma_k^2 =\frac{1}{k-1}\sum\limits_{i=1}^{k-1} {d^2(z_k ,z_i)} } \) is the variance of the data in terms of the cluster center.
In [3,9] the Cauchy function is used which has the same properties as the Gaussian but is suitable for recursive calculations.
$$ P(z)=\frac{1}{1+\overline \sigma^{2}}\:. $$(5) - Age of a cluster or fuzzy rule :
-
The age of the (evolving) cluster is defined as the accumulated time of appearance of the samples that form the cluster which support that fuzzy rule.
$$ A^i=k-\frac{\sum\limits_{l=1}^{S_k^i} {k_l} } {S_k^i} $$(6)where k denotes the current time instant; \( { S_k^i } \) denotes the support of the cluster that is the number of data samples (points) that are in the zone of influence of the cluster (formed by its radius). It is derived by simple counting of data samples (points) at the moment of their arrival (when they are first read) and assigned to the nearest cluster [10].
The values of A vary from 0 to k and the derivative of A in respect to time is always less or equal to 1 [17]. An “old” cluster (fuzzy rule) has not been updated recently. A “young” cluster (fuzzy rule) is one that has predominantly new samples or recent ones. The (first and second) derivatives of the age are very informative and useful for detection of data “ shift ” and “drift” [17].

Bibliography
Primary Literature
Andersen HC, Teng FC, Tsoi AC (1994) Single Net Indirect Learning Architecture. IEEE Trans Neural Netw 5:1003–1005
Angelov P (2002) Evolving Rule‐based Models: A Tool for Design of Flexible Adaptive Systems. Springer, Heidelberg
Angelov P (2004) An Approach for Fuzzy Rule‐base Adaptation using On‐line Clustering. Int J Approx Reason 35(3):275–289
Angelov PP (2004) A Fuzzy Controller with Evolving Structure. Inf Sci 161:21–35
Angelov P, Buswell R (2001) Evolving Rule‐based Models: A Tool for Intelligent Adaptation. In: Proc of the Joint 9th IFSA World Congress and 20th NAFIPS Intern Conf, Vancouver, 25–28 July 2001. IEEE Press, USA, pp 1062–1066
Angelov P, Buswell R (2002) Identification of Evolving Rule‐based Models. IEEE Trans Fuzzy Syst 10(5):667–677
Angelov P, Buswell R (2003) Automatic Generation of Fuzzy Rule‐based Models from Data by Genetic Algorithms. Inf Sci 150(1/2):17–31
Angelov P, Everett M (2005) EvoMap: On‐Chip Implementation of Intelligent Information Modelling using EVOlving MAPping. Lancaster University, Lancaster, pp 1–15
Angelov P, Filev D (2004) An approach to on‐line identification of evolving Takagi–Sugeno models. IEEE Trans Syst Man Cybern part B Cybern 34(1):484–498
Angelov P, Filev D (2005) Simpl_eTS: A Simplified Method for Learning Evolving Takagi–Sugeno Fuzzy Models. In: Proc of The 2005 IEEE Intern. Conf. on Fuzzy Systems FUZZ-IEEE – 2005, Reno 2005, pp 1068–1073
Angelov P, Filev D, Kasabov N, Cordon O (eds) (2006) Evolving Fuzzy Systems. Proc of the 2nd Int Symposium on Evolving Fuzzy Systems, Ambleside, 7–9 Sept 2006. pp 1–350
Angelov P, Kordon A, Zhou X (2008) Adaptive Inferential Sensors based on Evolving Fuzzy Models: An Industrial Case Study. IEEE Trans Fuzzy Syst (under review)
Angelov P, Lughofer E, Klement PE (2005) Two Approaches for Data – Driven Design of Evolving Fuzzy Systems: eTS and FLEXFIS. In: Proc of The 2005 North American Fuzzy Information Processing Society, NAFIPS Annual Conference, Ann Arbor, June 2005, pp 31–35
Angelov P, Victor J, Dourado A, Filev D (2004) On‐line evolution of Takagi–Sugeno Fuzzy Models. In: Proc of the 2nd IFAC Workshop on Advanced Fuzzy and Neural Control, Oulu, 16–17 Sept 2004, pp 67–72
Angelov P, Xydeas C, Filev D (2004) On‐line Identification of MIMO Evolving Takagi–Sugeno Fuzzy Models. In: Proc of the Intern. Joint Conf. on Neural Networks and Intern. Conf. on Fuzzy Systems, IJCNN-FUZZ-IEEE, Budapest, 25–29 July 2004, pp 55–60
Angelov P, Zhou X, Klawonn F (2007) Evolving Fuzzy Rule‐based Classifiers. In: Proc of the First 2007 IEEE International Conference on Computational Intelligence Applications for Signal and Image Processing – a part of the IEEE Symposium Series on Computational Intelligence, SSCI-2007, Honolulu, 1–5 April 2007, pp 220–225
Angelov P, Zhou X, Lughofer E, Filev D (2007) Architectures of Evolving Fuzzy Rule‐based Classifiers. In: Proc of the 2007 IEEE International Conference on Systems, Man, and Cybernetics, Montreal, 7–10 Oct 2007, pp 2050–2055
Arulampalam MS, Maskell S, Gordon N (2002) A Tutorial on Particle Filters for On‐line Nonlinear Non‐Gaussian Bayesian Tracking. IEEE Trans Signal Process 50(2):174–188
Astroem KJ, Wittenmark B (1994) Adaptive Control. Prentice Hall, Upper Saddle River
Azimi‐Sadjadi MR, Yao D, Jamshidi AA, Dobeck GJ (2002) Underwater Target Classification in Changing Environments Using an Adaptive Feature Mapping. IEEE Trans Neural Netw 13(5):1099–1111
Badami VV, Chbat NW (1998) Home appliances get smart. IEEE Spectrum 35(8):36–43
Bezdek J (1974) Cluster Validity with Fuzzy Sets. J Cybern 3(3):58–71
Bonarini A, Lazaric A, Restelli M, Vitali P (2006) Self‐Development Framework for Reinforcement Learning Agents. In: Proc of the 5th Intern. Conf. on Development and Learning, ICDL-06 New Delhi
Carline D, Angelov PP, Clifford R (2005) Agile Collaborative Autonomous Agents for Robust Underwater Classification Scenarios. In: the Proceedings of the Underwater Defense Technology Conference, Amsterdam, June 2005
Carpenter GA, Grossberg S (2003) Adaptive Resonance Theory. In: Arbib MA (ed) The Handbook of Brain Theory and Neural Networks, 2nd edn. MIT Press, Cambridge, pp 87–90
Chiu SL (1994) Fuzzy model identification based on cluster estimation. J Intell Fuzzy Syst 2:267–278
Cordon O, Gomide F, Herrera F, Hoffmann F, Magdalena L (2004) Ten years of genetic fuzzy systems: Current framework and new trends. Fuzzy Sets Syst 141(1):5–31
Domingos P, Hulten G (2001) Catching up with the data: Research issues in mining data streams. In: Proc of the Workshop on Research Issues in Data Mining and Knowledge Discovery, Santa Barbara
Filev D, Larson T, Ma L (2000) Intelligent Control for Automotive Manufacturing – Rule-based Guided Adaptation. In: Proc of the IEEE Conference on Industrial Electronics, IECON-2000, Nagoya Oct 2000, pp 283–288
Filev D, Tseng F (2006) Novelty detection‐based Machine Health Prognostics. In: Proc of the 2006 Int Symposium on Evolving Fuzzy Systems. IEEE Press, USA, pp 193–199
Fortuna L, Graziani S, Rizzo A, Xibilia MG (2007) Soft sensors for Monitoring and Control of In Industrial Processes. Springer, London
Goldberg DE (1989) Genetic Algorithms in Search, Optimization and Machine Learning. Addison‐Wesley, Reading
Hastie T, Tibshirani R, Friedman J (2001) The Elements of Statistical Learning: Data Mining, Inference and Prediction. Springer, Heidelberg
Hornby AS (1974) Oxford Advance Learner's Dictionary. Oxford University Press, Oxford
HuangG-B, Saratchandran P, Sundarajan N (2005) A generalized growing and pruning RBF (GGAP – RBF) neural network for function approximation. IEEE Trans Neural Netw 16(1):57–67
Ishibuchi H, Nakashima T, Nii M (2004) Classification and Modeling with Linguistic Granules: Advanced Information Processing. Springer, Berlin
JonesE, Angelov P, Xydeas C (2006) Recovery of LSP Coefficients in VoIP Systems using Evolving Takagi–Sugeno Fuzzy MIMO Models. In: Proc of the 2006 Intern. Symposium on Evolving Fuzzy Systems, Ambelside, 7–9 Sept 2006, pp 208–214
Kailath T, Sayed AH, Hassibi B (2000) Linear Estimation. Prentice Hall, Upper Saddle River
Kalman RE (1960) A New Approach to linear filtering and prediction problem. Transactions of the American Society of Mechanical Engineering, ASME, Ser. D. J Basic Eng 8:34–45
Kanakakis V, Valavanis KP, Tsourveloudis NC (2004) Fuzzy‐Logic Based Navigation of Underwater Vehicles. J Intell Robotic Syst 40:45–88
Kasabov N (2001) Evolving fuzzy neural networks for on‐line supervised/unsupervised, knowledge‐based learning. IEEE Trans. on Systems, Man and Cybernetics – part B. Cybernetics 31:902–918
Kasabov N, Song Q (2002) DENFIS: Dynamic Evolving Neural‐Fuzzy Inference System and Its Application for Time‐Series Prediction. IEEE Trans Fuzzy Syst 10(2):144–154
Klir G, Folger T (1988) Fuzzy Sets, Uncertainty and Information. Prentice Hall, Englewood Cliffs
Kohonen T (1995) Self‐Organizing Maps. Series in Inf Sci, vol 30. Springer, Heidelberg
Kordon A (2006) Inferential Sensors as Potential Application Area of Intelligent Evolving Systems. 2006 International Symposium on Evolving Fuzzy Systems, Ambleside, 7–9 September 2006, key note presentation
Kuncheva L (2000) Fuzzy Classifiers. Physica, Heidelberg
Leng G, McGuinty TM, Prasad G (2005) An approach for on‐line extraction of fuzzy rules using a self‐organizing fuzzy neural network. Fuzzy Sets Syst 150(2):211–243
Lin F-J, Lin C-H, Shen P-H (2001) Self‐constructing fuzzy neural network speed controller for permanent‐magnet synchronous motor drives. IEEE Trans Fuzzy Syst 9(5):751–759
Liu PX, Meng MQ-X (2004) On‐line Data‐Driven Fuzzy Clustering with Applications to Real‐time Robotic Tracking. IEEE Trans Fuzzy Syst 12(4):516–523
Ljung L (1987) System Identification: Theory for the User. Prentice‐Hall, New Jersey
Lughofer E, Angelov P, Zhou X (2007) Evolving Single‐ and Multi‐Model Fuzzy Classifiers with FLEXFIS‐Class. In: Proc of the 2007 IEEE International Conference on Fuzzy Systems, London, 23–26 July 2007, pp 363–368
Macias J, Angelov P, Zhou X (2006) Predicting quality of the crude oil distillation using evolving Takagi–Sugeno fuzzymodels. In: Proc of the 2006 International Symposium on Evolving Fuzzy Systems, Ambleside, 7–9 Sept 2006, pp 201–207
Macias‐Hernandez JJ, Angelov P, Zhou X (2007) Soft Sensor for Predicting Crude Oil Distillation Side Streams using Takagi Sugeno Evolving Fuzzy Models. In: Proc of the 2007 IEEE Int Conf on Syst, Man, and Cybernetics, Montreal, 7–10 Oct. 2007, pp 3305–3310
Mamdani EH, Assilian S (1975) An Experiment in Linguistic Synthesis with a Fuzzy Logic Controller. Int J Man‐Mach Stud 7:1–13
Massaro DW (1991) Integration versus Interactive Activation: The Joint Influence of Stimulus and Context in Perception. Cogn Psychol 23:558–614
Memon MA, Angelov P, Ahmed H (2006) An Approach to Real‐Time Color‐based Object Tracking. In: Proc 2006 International Symposium on Evolving Fuzzy Systems, Ambleside, 7–9 Sept 2006, pp 81–87
Nauck D, Kruse R (1997) A Neuro‐fuzzy method to learn fuzzy classification rules from data. Fuzzy Sets Syst 89:277–288
Pioneer‐3DX (2004) User Guide. ActiveMedia Robotics, Amherst
Procyk TJ, Mamdani EH (1979) A linguistic self‐organizing process controller. Automatica 15:15–30
PsaltisD, Sideris A, Yamamura AA (1988) A Multilayered Neural Network Controller. IEEE Trans Control Syst Manag 8:17–21
Qin SJ, Yue H, Dunia R (1997) Self‐validating inferential sensors with application to air emission monitoring. Ind Eng Chem Res 36:1675–1685
Setnes M, Roubos H (2000) Ga‐fuzzy modeling and classification: complexity and performance. IEEE Trans Fuzzy Syst 8(5):509–522
Shimojima K, Fukuda T, Hashegawa Y (1995) Self‐Tuning Modeling with Adaptive Membership Function, Rules, and Hierarchical Structure based on Genetic Algorithm. Fuzzy Sets Syst 71:295–309
Sifalakis M, Hutchison D (2004) From Active Networks to Cognitive Networks. In: Proc of the ICRC Dagstuhl Seminar 04411 on Service Management and Self‐Organization in IP‐based Networks. Waden, October 2004
Takagi T, Sugeno M (1985) Fuzzy identification of systems and its application to modeling and control. IEEE Trans Syst Man Cybern B – Cybern 15:116–132
Valavanis K (2006) Unmanned Vehicle Navigation and Control: A Fuzzy Logic Perspective. In: Proc of the 2006 InternationalSymposium on Evolving Fuzzy Systems. Ambleside, 7–9 Sept. 2006, pp 200–207
Vapnik VN (1998) The Statistical Learning Theory. Springer, Berlin
Wang L-X (1992) Fuzzy Systems are Universal Approximators. In: Proc of the First IEEE International Conference on Fuzzy Systems, FUZZ-IEEE – 1992, San Diego, pp 1163–1170
Widrow B, Stearns S (1985) Adaptive Signal Processing. Prentice Hall, Englewood Cliffs
Xydeas C, Angelov P, Chiao S, Reoullas M (2006) Advances in EEG Signals Classification via Dependant HMM models and Evolving Fuzzy Classifiers. Int J Comput Biol Medicine, special issue on Intell Technol Bio‐Inform Medicine 36(10):1064–1083
Yager R (2006) Learning Methods for Intelligent Evolving Systems. In: Proc 2006 International Symposium on Evolving Fuzzy Systems. Ambelside, 7–9 Sept. 2006, pp 3–7
Yager RR, Filev DP (1993) Learning of Fuzzy Rules by Mountain Clustering. In: Proc of the SPIE Conf. on Application of Fuzzy Logic Technology, Boston, pp 246–254
Yager RR, Filev DP (1994) Essentials of Fuzzy Modeling and Control. Wiley, New York
Zadeh LA (1993) Soft Computing. Introductory Lecture for the 1st European Congress on Fuzzy and Intelligent Technologies EUFIT'93, Aachen, pp vi–vii
Zhou X-W, Angelov P (2006) Real‐Time joint Landmark Recognition and Classifier Generation by an Evolving Fuzzy System. In: Proc of the 2006 IEEE World Congress on Computational Intelligence, WCCI-2006, Vancouver, 16–21 July 2006, pp 6314–6321
Zhou X, Angelov P (2007) An approach to autonomous self‐localization of a mobile robot in completely unknown environment using evolving fuzzy rule‐based classifier. In: Proc of the First 2007 IEEE Int Symposium on Computational Intelligence Applications for Defense and Security – a part of the IEEE Symposium Series on Computational Intelligence, SSCI-2007, Honolulu, 1–5 April 2007, pp 131–138
Books and Reviews
Angelov P, Xydeas C (2006) Fuzzy Systems Design: Direct and Indirect Approaches. Int J Soft Comput, special issue on New Trends in Fuzzy Modeling part I: Novel Approaches 10(9):836–849
Angelov P, Zhou X (2006) Evolving fuzzy systems from data streams in real‐time. Proc 2006 International Symposium on Evolving Fuzzy Systems, Ambleside, 7–9 Sept. 2006, pp 29–35
Bentley PJ (2000) Evolving Fuzzy Detectives: An Investigation into the Evolution of Fuzzy Rules. In: Suzuki, Roy, Ovasks, Furuhashi, Dote (eds) Soft Computing in Industrial Applications. Springer, London
Chan Z, Kasabov N (2004) Evolutionary computation for on‐line and off‐line parameter tuning of evolving fuzzy neural networks. Int J Comput Intell Appl 4(3):309–319
Fayyad UM, Piatetsky‐Shapiro G, Smyth P (1996) From Data Mining to Knowledge Discovery: An Overview, Advances in Knowledge Discovery and Data Mining. MIT Press, Boston
Fritzke B (1994) Growing cell structures – a self‐organizing network for unsupervised and supervised learning. Neural Netw 7(9):1441–1460
Futschik M, Reeve A, Kasabov N (2003) Evolving connectionist systems for knowledge discovery from gene expression data of cancer tissue. Artif Intell Med 28:165–189
Hopner F, Klawonn F (2000) Obtaining interpretable fuzzy models from fuzzy clustering and fuzzy regression. In: Proc of the 4th Intern Conf on Knowledge‐based Intelligent Engineering Systems (KES), Brighton, pp 162–165
Huang G-B, Saratchandran P, Sundarajan N (2005) A generalized growing and pruning RBF (GGAP‐RBF) neural network for function approximation. IEEE Trans Neural Netw 16(1):57–67
Huang L, Song Q, Kasabov N (2005) Evolving Connectionist Systems Based Role Allocation of Robots for Soccer Playing. In: Proc of the Joint 2005 International Symposium on Intelligent Control and 13th Mediterranean Conference on Control and Automation, ISIC – MED – 2005, Limassol, 27–29 June 2005
Jang JSR (1993) ANFIS: Adaptive Network‐based Fuzzy Inference Systems. IEEE Trans. on Syst Man Cybernt B – Cybern 23(3):665–685
Juang C-F, Lin X-T (1999) A recurrent self‐organizing neural fuzzy inference network. IEEE Trans Neural Netw 10:828–845
Kasabov N (2006) Adaptation and Interaction in Dynamical Systems: Modelling and Rule Discovery Through Evolving Connectionist Systems. Appl Soft Comput 6(3):307–322
Kasabov N (2006) Evolving connectionist systems: Brain-, gene-, and, quantum inspired computational intelligence. Springer, London
Kasabov N, Chan Z, Song Q, Greer D (2005) Evolving neuro‐fuzzy systems with evolutionary parameter self‐optimisation. In: Do Adaptive Smart Systems exist? Series Study in Fuzziness, vol 173. Physica, Heidelberg
Kim K, Baek J, Kim E, Park M (2005) TSK Fuzzy model based on‐line identification. In: Proc of the 11th International Fuzzy Systems Association, IFSA World Congress, Beijing, pp 1435–1439
Klinkenberg R, Joachims T (2000) Detection concept drift with support vector machines. Proc of the 7th International Conference on Machine Learning (ICML). Morgan Kaufman, Stanford University, pp 487–494
Marin‐Blazquez JG, Shen Q (2002) From approximative to descriptive fuzzy classifiers. IEEE Trans Fuzzy Syst 10(4):484–497
Marshall MR, Song Q, Ma TM, MacDonell S, Kasabov N (2005) Evolving Connectionist System versus Algebraic Formulae for Prediction of Renal Function from Serum Creatinine. Kidney Int 6:1944–1954
Ozawa S, Pang S, Kasabov N (2004) A Modified Incremental Principal Component Analysis for On‐Line Learning of Feature Space and Classifier. Lecture Notes in Artificial Intelligence LNAI, vol 3157. Springer, Berlin, pp 231–240
Pang S, Ozawa S, Kasabov N (2005) Incremental Linear Discriminant Analysis for Classification of Data Streams. IEEE Trans Syst Man Cybern B – Cybern 35(5):905–914
Plat J (1991) A resource allocation network for function interpolation. Neural Comput 3(2):213–225
Widmer G, Kubat M (1996) Learning in the presence of concept drift and hidden contexts. Mach Learn 23(1):69–101
Acknowledgments
The author would like to thank Mr. Xiaowei Zhou for his assistance in producing the illustrative material, Dr. Jose Macias Hernandez forkindly providing real data from the oil refinery CEPSA, Santa Cruz, Tenerife, Spain, Dr. Richard Buswell, Loughborough University and ASHRAE(RP‐1020) for the real air conditioning data, and Dr. Edwin Lughofer from Johannes Kepler University of Linz, Austria for providing real data fromcar engines.
Author information
Authors and Affiliations
Editor information
Editors and Affiliations
Rights and permissions
Copyright information
© 2009 Springer-Verlag
About this entry
Cite this entry
Angelov, P. (2009). Evolving Fuzzy Systems. In: Meyers, R. (eds) Encyclopedia of Complexity and Systems Science. Springer, New York, NY. https://doi.org/10.1007/978-0-387-30440-3_192
Download citation
DOI: https://doi.org/10.1007/978-0-387-30440-3_192
Publisher Name: Springer, New York, NY
Print ISBN: 978-0-387-75888-6
Online ISBN: 978-0-387-30440-3
eBook Packages: Physics and AstronomyReference Module Physical and Materials ScienceReference Module Chemistry, Materials and Physics