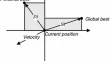
A locally convergent rotationally invariant particle swarm optimization algorithm Mohammad Reza BonyadiZbigniew Michalewicz OriginalPaper 01 August 2014 Pages: 159 - 198
Stigmergic algorithms for multiple minimalistic robots on an RFID floor Ali Abdul KhaliqMaurizio Di RoccoAlessandro Saffiotti OriginalPaper 25 July 2014 Pages: 199 - 225
Designing pheromone communication in swarm robotics: Group foraging behavior mediated by chemical substance Ryusuke FujisawaShigeto DobataFumitoshi Matsuno OriginalPaper 26 August 2014 Pages: 227 - 246