Design of tendon mechanism for soft wearable robotic hand and its fuzzy control using electromyogram sensor Jin-Gon YoonMin Cheol Lee Original Research Paper 24 February 2021 Pages: 119 - 128
Grasp2Hardness: fuzzy hardness inference of cylindrical objects for grasp force adjustment of force sensor-less robots Shiqi LiShuai ZhangZheng Xie Original Research Paper 24 March 2021 Pages: 129 - 141
Gait training algorithm based on inverse dynamics of walking rehabilitation robot, DDgo Pro Ji-Yong KimJung-Yup Kim Original Research Paper 25 February 2021 Pages: 143 - 155
Flocks formation model for self-interested UAVs Rina AzoulayShulamit Reches Original Research Paper 01 March 2021 Pages: 157 - 174
Combining CNN and LSTM for activity of daily living recognition with a 3D matrix skeleton representation Giovanni ErcolanoSilvia Rossi Original Research Paper Open access 10 March 2021 Pages: 175 - 185
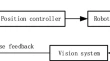
Fuzzy-PI double-layer stability control of an online vision-based tracking system Nianfeng WangKaifan ZhongLiang Zhang Original Research Paper 23 March 2021 Pages: 187 - 197
RCNet: road classification convolutional neural networks for intelligent vehicle system Deepak Kumar DewanganSatya Prakash Sahu Original Research Paper 12 February 2021 Pages: 199 - 214
What went wrong? Identification of everyday object manipulation anomalies Dogan AltanSanem Sariel Original Research Paper 11 March 2021 Pages: 215 - 234
An Integrated Localization, Motion Planning and Obstacle Avoidance Algorithm in Belief Space Antony ThomasFulvio MastrogiovanniMarco Baglietto Original Research Paper 08 March 2021 Pages: 235 - 250
Disturbance rejection sliding mode control for robots and learning design Fangli MouDan WuYunfei Dong Original Research Paper 29 March 2021 Pages: 251 - 269
A geometric tracking of rank-1 manipulability for singularity-robust collision avoidance Alchan YunJunhyoung Ha Original Research Paper 12 February 2021 Pages: 271 - 284
From topological map to local cognitive map: a new opportunity of local path planning Qingyang ChenYafei LuBingjie Zhu Original Research Paper 10 February 2021 Pages: 285 - 301
A multi-subpopulation bacterial foraging optimisation algorithm with deletion and immigration strategies for unmanned surface vehicle path planning Yang LongYixin SuJie Li Original Research Paper 25 March 2021 Pages: 303 - 312
Coordination of multi-robot path planning for warehouse application using smart approach for identifying destinations Kaushlendra SharmaRajesh Doriya Original Research Paper 27 March 2021 Pages: 313 - 325