Flexible multibody simulation using hybrid integration scheme Gibin GilParviz E. Nikravesh OriginalPaper 13 January 2016 Pages: 3 - 13
Multibody dynamics as a tool for historical research Baudouin BokiauAnne-Emmanuelle CeulemansPaul Fisette OriginalPaper 05 January 2016 Pages: 15 - 28
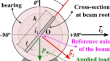
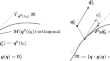
Validation of flexible multibody dynamics beam formulations using benchmark problems Olivier A. BauchauPeter BetschValentin Sonneville OriginalPaper 09 March 2016 Pages: 29 - 48
Feedforward dynamics for the control of articulated multi-limb robots Abhinandan JainCalvin KuoIvan Sinkarenko OriginalPaper 16 March 2016 Pages: 49 - 68
A full-scale roller-rig for railway vehicles: multibody modelling and Hardware In the Loop architecture R. ContiE. MeliA. Ridolfi OriginalPaper 24 February 2016 Pages: 69 - 93
Evaluation of head-collision safety of a 7-DOF manipulator according to posture variation Ki Hong KimIn Jun ParkSungsoo Rhim OriginalPaper 18 March 2016 Pages: 95 - 105
Convergence of generalized-\(\boldsymbol{\alpha}\) time integration for nonlinear systems with stiff potential forces M. A. KöbisM. Arnold OriginalPaper 23 December 2015 Pages: 107 - 125
Hard real-time multibody simulations using ARM-based embedded systems Roland PastorinoFrancesco CoscoJavier Cuadrado OriginalPaper 29 January 2016 Pages: 127 - 143