Binding human spatial interactions with mapping for enhanced mobility in dynamic environments Panagiotis PapadakisPatrick Rives OriginalPaper 16 June 2016 Pages: 1047 - 1059
Learning modular and transferable forward models of the motions of push manipulated objects Marek KopickiSebastian ZurekJeremy L. Wyatt OriginalPaper Open access 22 June 2016 Pages: 1061 - 1082
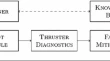
Energy-aware fault-mitigation architecture for underwater vehicles Valerio De CarolisFrancesco MaurelliDavid M. Lane OriginalPaper 29 June 2016 Pages: 1083 - 1105
A bionic autonomous navigation system by using polarization navigation sensor and stereo camera Zhiwen XianXiaofeng HeLilian Zhang OriginalPaper 15 July 2016 Pages: 1107 - 1118
Symmetry in legged locomotion: a new method for designing stable periodic gaits Hamed RazaviAnthony M. BlochJessy W. Grizzle OriginalPaper 21 July 2016 Pages: 1119 - 1142
Optimal transition from hovering to level-flight of a quadrotor tail-sitter UAV Atsushi OosedoSatoko AbikoMasaru Uchiyama OriginalPaper 25 July 2016 Pages: 1143 - 1159
Dynamic Bayesian network for semantic place classification in mobile robotics Cristiano PremebidaDiego R. FariaUrbano Nunes OriginalPaper 28 July 2016 Pages: 1161 - 1172
Robot life-long task learning from human demonstrations: a Bayesian approach Nathan KoenigMaja J. Matarić OriginalPaper 28 July 2016 Pages: 1173 - 1188
Autonomous human–robot proxemics: socially aware navigation based on interaction potential Ross MeadMaja J Matarić OriginalPaper 07 June 2016 Pages: 1189 - 1201
Behavioral control of unmanned aerial vehicle manipulator systems K. BaizidG. GiglioA. Ollero OriginalPaper 08 July 2016 Pages: 1203 - 1220
Low stiffness design and hysteresis compensation torque control of SEA for active exercise rehabilitation robots Wonje ChoiJongseok WonJaeheung Park OriginalPaper 08 July 2016 Pages: 1221 - 1242
Erratum to: Low stiffness design and hysteresis compensation torque control of SEA for active exercise rehabilitation robots Wonje ChoiJongseok WonJaeheung Park Erratum 30 November 2016 Pages: 1243 - 1244
Detecting perceived quality of interaction with a robot using contextual features Ginevra CastellanoIolanda LeiteAna Paiva OriginalPaper 08 July 2016 Pages: 1245 - 1261
Enabling personalised medical support for chronic disease management through a hybrid robot-cloud approach Laura FioriniRaffaele EspositoFilippo Cavallo OriginalPaper Open access 08 July 2016 Pages: 1263 - 1276