Behavioral specialization emerges from the embodiment of a robotic swarm Motoaki HiragaYasumasa TamuraKazuhiro Ohkura Original Article 22 October 2020 Pages: 495 - 502
Passive joint control of a snake robot by rolling motion Ryo AriizumiKentaro KoshioFumitoshi Matsuno Original Article 10 October 2020 Pages: 503 - 512
Event-triggered and self-triggered formation control of a multi-agent system Toru NamerikawaRyo ToyotaMasamichi Akiyama Original Article 13 October 2020 Pages: 513 - 522
Diversity in self-organized forms and migration modes in isolated epithelial cells Shota MiseShimon ShibagakiAtsuko Takamatsu Original Article 13 October 2020 Pages: 523 - 528
Separation of pedestrian counter flows with an array of obstacles Shihori KoyamaDaisuke InoueHiroaki Yoshida Original Article 15 October 2020 Pages: 529 - 536
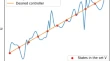
Automatic quality evaluation of parade by variance of postures of a platoon on single video camera logs Masao KuboYohei OkugawaHiroshi Sato Original Article 15 October 2020 Pages: 537 - 543
Visualization of dynamic structure in flocking behavior Daichi SaitoNorihiro MaruyamaTakashi Ikegami Original Article 13 October 2020 Pages: 544 - 551
Microbial associates and social behavior in ants Alessio ScloccoSerafino Teseo Original Article 13 October 2020 Pages: 552 - 560
An agent-based model for community formation process of vampire bats that survive by sharing food Taishi MikamiTakeshi KanoAkio Ishiguro Original Article 15 October 2020 Pages: 561 - 568
Evolving behaviour trees for supervisory control of robot swarms Elliott HoggSabine HauertArthur Richards Original Article Open access 18 October 2020 Pages: 569 - 577
Two extensions of heterogeneous boid model to avoid metastable patterns Mari Nakamura Original Article 19 October 2020 Pages: 578 - 587
Generating collective foraging behavior for robotic swarm using deep reinforcement learning Boyin JinYupeng LiangKazuhiro Ohkura Original Article 19 October 2020 Pages: 588 - 595
Tamper-resistant controller using neural network and time-varying quantization Fangyuan XuRyo AriizumiToru Asai Original Article 13 October 2020 Pages: 596 - 602
Strict stealth walking gait generation for 3-link underactuated biped robots Hiroki ShibataFumihiko Asano Original Article 21 October 2020 Pages: 603 - 611
Constrained optimization by improved particle swarm optimization with the equivalent penalty coefficient method Tetsuyuki TakahamaSetsuko Sakai Original Article 12 October 2020 Pages: 612 - 623
High-speed crawling-like locomotion robot using wobbling mass and reaction wheel Masatsugu NishiharaLongchuan LiFumihiko Asano Original Article 22 October 2020 Pages: 624 - 632
Revealing the existence of the ontological commitment in fish schools Takayuki NiizatoKotaro SakamotoToshiki Fukushima Original Article 13 October 2020 Pages: 633 - 642
First-order agent-based models of emergent behaviour of Dictyostelium discoideum and their inspiration for swarm robotics Mohammad ParhizkarGiovanna Di Marzo SerugendoThierry Soldati Original Article Open access 23 October 2020 Pages: 643 - 655
Second-order agent-based models of emergent behaviour of Dictyostelium discoideum and their inspiration for swarm robotics Mohammad ParhizkarGiovanna Di Marzo SerugendoThierry Soldati Original Article Open access 23 October 2020 Pages: 656 - 665