
Abstract
As the world strives toward meeting the Paris agreement target of zero carbon emission by 2050, more renewable energy generators are now being integrated into the grid, this in turn is responsible for frequency instability challenges experienced in the new grid. The challenges associated with the modern power grid are identified in this research. In addition, a review on virtual inertial control strategies, inertia estimation techniques in power system, modeling characteristics of energy storage systems used in providing inertia support to the grid, and modeling techniques in power system operational and expansion planning is given. Findings of this study reveal that adequate system inertia in the modern grid is essential to mitigate frequency instability, thus, considering the inertia requirement of the grid in operational and expansion planning model will be key in ensuring the grid’s stability. Finally, a direction for future research has been identified from the study, while an inertial constant of between 4 and 10 s is recommended to ensure frequency stability in modern power grid.
Similar content being viewed by others

Introduction
Conventional generators are becoming undesirable in the power sector due to the negative effect of fossil fuel emissions on the environment which has led to several climate-related challenges such as increased temperatures and rainfall variabilities [1,2,3,4,5]. Thus, many countries around the world are now replacing their existing conventional generators with renewable energy (RE) sourced generators, in line with the Paris agreement, and the European green deal goal of zero carbon emission by 2050 as well as other RE policies geared at reducing greenhouse gases emissions [6,7,8,9].
Subsequently, about 627 GW of photovoltaic (PV) systems and 743 GW of wind turbines have already been integrated into the grid globally, with an expected increase of 45% by 2040 [10]. Thus, developed countries such as China, United States, Spain, India, Ireland, and Uruguay have already achieved high penetration of RE generators integrated into the grid [10].
On the other hand, synchronous generators (SGs) benefit the grid in numerous ways such as providing voltage and reactive power support, as well as provision of synchronous inertia, which is responsible for maintaining the grid’s frequency, particularly during times of system contingencies such as sudden loss of load or generator [10,11,12,13].
On the contrary, PV systems and modern variable speed wind turbines provide zero inertia to the grid because they lack rotating mass (for PV) and are decoupled from the grid through converters, hence they inherently cannot provide primary frequency response to the grid [14,15,16,17,18,19]. Furthermore, the increasing dominance of these variable RE generators in the power grid has led to the reduced overall system inertia of the grid, which causes grid stability challenges such as severe frequency nadir, voltage instability, fast rate of change of frequency (RoCoF), and increased harmonics [19,20,21]. For example, countries such as New Zealand, United States, United Kingdom, Cyprus, and Ireland with high penetration of RE sources have already reported cases of power disturbances due to large frequency nadir (47.5 Hz) and fast rate of change of frequency (0.73 Hz/s) which led to power interruption to a large number of customers [22].
Several methods have been proposed in the literature to mitigate frequency instability by primarily emulating the inertia response of SGs and induction machines through the use of RE sources and energy storage sources (ESS) with a suitable converter control strategy, this concept is called virtual inertia control [19, 23,24,25]. Other methods adopted to provide frequency stability include RE curtailment or deloaded operation of RE generators [26,27,28], use of synchronous condensers to provide synchronous inertia [22, 29,30,31], and load curtailment using incentive-based demand response schemes such as direct load control, and time-of-use rates [32,33,34].
Furthermore, optimization models have been used to proffer solutions to challenges arising from the increasing growth of RE generators in the grid. The authors in [35] developed a generation expansion planning (GEP) model solved as a mixed-integer linear programming (MILP) optimization problem to minimize investment cost and air pollution. Authors in [36,37,38,39] proposed a generation and transmission expansion planning model (GTEP) to minimize the investment and operational costs of new power plants. Authors in [40] and [41] developed a MILP model to minimize investment cost using the Tailored Benders decomposition algorithm in MATLAB and Nested Benders decomposition in Python. The studies, however, did not consider the frequency stability of the grid in planning. Furthermore, the authors in [42] carried out generation expansion planning for PV, thermal, and wind power plant to minimize the investment and operational costs. Fitiwi in [43] developed a linear AC optimal power flow model for generation expansion planning to minimize cost, voltage violations, and energy losses using the CPLEX solver in GAMS, this model was evaluated using the IEEE 23, 54, and 69 bus system. However, the study did not account for the inertia requirement of the grid for stability. Authors in [44] proposed a hybrid framework for GTEP to minimize planning cost while considering the resilience of the power system components. Furthermore, Kim in [45] proposed a probabilistic model for grid expansion planning using the Weibull distribution, considering wind energy uncertainties, while the authors in [46] proposed a model for optimal placement of battery energy storage system (BESS) in transmission expansion planning (TEP) using the Benders’ decomposition approach. More so, in [47], the authors proposed a generation, storage, and transmission expansion planning (GSTEP) model to minimize cost while meeting the load demand. In [48], an integrated multi-period model of transmission, generation, and storage expansion planning (TGSEP) model was proposed considering uncertainties from renewable energy sources (RES) and load demand. However, this model is limited as only BESS was considered as the energy storage system. In [49], a TEP model was proposed to minimize power outages and cost using the Benders decomposition algorithm, while the authors in [50] carried out a multi-period generation expansion planning for wind power plants using a differential evolution algorithm. Furthermore, the authors in [51] developed a scenario-based stochastic model for integrated electricity and gas networks expansion planning (IEGNEP) model considering N-1 contingency criteria, and system uncertainties from PV generation and electrical loads. More so, the authors in [52] and [53] analyzed the economic effect of carbon tax on power system expansion planning model by developing a MILP model to minimize carbon emission in the power system for a period of 10 years. Authors in [54] developed a scenario-based multi-objective model to minimize CO2 emission and cost of investment and operation in a distribution system expansion planning model (DSEP) considering system uncertainties. The authors in [55] also investigated the effect of climate changes on wind speed in GTEP for a 85 years planning period. Furthermore, the authors in [56] proposed a two-stage robust optimization approach to minimize investment cost in a distribution network, while considering N-1 generation contingency and demand response. The model was tested in a modified IEEE 123-bus test system.
The review of the literature reveals that no work has yet considered cost, emission, and the inertia requirement of the grid in joint generation and transmission expansion planning. This paper therefore aims to give foresight into inertia consideration in operational and joint generation and transmission expansion planning optimization model.
The specific objectives of this research are as follows:
-
To provide a synoptic review of the impact of increasing RE sources on the dynamics of the power grid.
-
To provide a review of virtual inertia topologies and strategies used in compensating system inertia in renewable energy sourced grid.
-
To give a concise review of the modeling characteristics of energy storage systems essential for providing additional inertia to the grid.
-
To provide a review on inertia estimation methods in power system.
The remaining part of this paper is organized as follows. “Frequency stability in power system” section highlights the transformation in grid composition and reviews the associated frequency instability challenges in the new grid. It further gives the modeling characteristics of energy storage systems suited for virtual inertia provision. “The concept of inertia in power system ” section gives the description and mathematical formulation of system inertia. It further gives the various inertia estimation techniques in power system. “Virtual inertia topology and strategy in modern power grid” section gives the types of virtual inertia control topologies and strategies highlighting their merits and demerits. “Operational and expansion planning optimization in power system” section gives an overview of various techniques used in operational and expansion planning optimization models, while “Conclusion” section gives the conclusion of the research.
Frequency stability in power system
Frequency control techniques are used to ensure frequency is maintained within a specified limit after system contingency [33, 57]. During times of system contingency, the inertia inherent in the grid reacts first by providing an instant frequency response within 1–10 s after the disturbance, just before the controllers are triggered [58,59,60]. Figure 1 shows the timeline of frequency responses in power system. It is seen that a system with low inertia will experience larger frequency nadir compared with a system with high inertia system. More so, it is observed that primary frequency controllers are set to operate immediately after the inertia response has been provided, while the secondary frequency control or automatic generator control action takes place between 10 and 30 min after the contingency as occurred [58, 61].

Time-scale of frequency response during power system contingency [58]
Dynamics and composition of renewable energy-sourced Grid
The dynamics and structural composition of the power grid are changing due to the increased penetration of RE generators into the grid. This in turn is responsible for the declining overall inertia of the grid. More so, the inertia obtained from RE sources is time-varying due to the stochastic nature of RE generators thus making the overall system inertia time-varying inertia [62]. These changes have led to technical challenges such as high-frequency deviations (spike and nadir), unwanted frequency oscillations, and high rate of change of frequency [63]. These frequency instabilities are undesirable in power system as they may lead to cascaded system failures. Figure 2 shows the transformation in the composition of the grid over the years, from synchronous generators dominant to renewable energy generators dominant.

Changes in the composition of the power grid
Frequency mitigating strategies in Renewable energy sourced grid
Owing to the frequency-related challenges associated with renewable energy-sourced grid, countries such as Ireland and Australia have now pegged RE integration into the grid at a certain percentage (70%) to keep RoCoF below 0.5 Hz/s during contingencies, while others have revised their grid codes in line with the new dynamics of the grid [10]. The most commonly used method is by emulating the inertia of SGs and induction machines using RE sources, energy storage system with an appropriate converter control strategy [19, 24, 25]. Authors in [9, 13, 21, 64] also proposed the use of synchronous generators as spinning reserves, synchronous condensers, and rotating stabilizers to provide inertia to the grid during times of contingency, while RE generators remain the main source of power generation. Though this method provides the needed system inertia, it is however limited by its high cost of implementation and high carbon emission. Authors in [21, 22, 65] proposed the use of energy storage systems together with renewable energy sources in a hybrid combination such as PV-BESS, wind turbine-flywheel energy storage (FES), and PV-supercapacitor (SCES). Authors in [66] proposed a model comprising a hybrid combination of BESS and SCES to mitigate frequency fluctuation at the point of coupling of rooftop solar PV units.
Characteristics of energy storage systems
Energy storage systems are often used to provide stability in the grid by supplying energy to the grid during times of deficiency or absorbing energy from the grid during times of excess [80]. Good knowledge of the characteristics of the various types of energy storage systems used for providing additional inertia to the grid is important for proper modeling of the dynamics of the new grid. The unique characteristics of commonly used energy storage systems suited for inertia provision are discussed here.
Battery energy storage system
Battery energy storage system is one of the commonly used storage systems in modern power system. BESS can be modeled based on its characteristics such as the number of charge–discharge cycles, state of charge (SoC), depth of discharge (DoD), and charging and discharging rate [81,82,83,84] as seen in Table 1.
The charging and discharging equation of a battery can be given as in Eqs. (1) and (2), respectively.
where \(E_{b}^{t}\) and \(E_{b}^{t - 1}\) are the stored energy in the battery after and before charge, respectively. \(P_{b,c}^{t}\) is the charging power of battery, \(P_{b,d}^{t}\) is the discharging power of the battery, \(\eta_{b}^{c}\) and \(\eta_{b}^{d}\) are the charging and discharging efficiency of the battery, respectively.
The state of charge of a battery can then be estimated as in Eq. (3) [85].
where \(SoC_{b,t}\) and \(SoC_{b,t - 1}\) defines the present and previous state of charge of the battery, respectively.
The DoD of a battery indicates the battery’s discharge percentage relative to the total capacity of the battery. The DoD can be expressed in terms of the battery’s SoC as in Eq. (4).
Pumped hydro storage system
Pumped hydro energy storage (PHES) is an energy storage system that is often used in hybridized forms such as PV-PHES, WIND-PHES, WIND-PV-PHES, and HYDRO-PHES, which can provide synchronous inertia to the grid. Pumped hydro storage system comprises the pump, hydro-turbine, penstock, upper and lower reservoirs [93, 94]. PHES operates in generating mode during times of energy deficiencies and in the pumping mode during times of energy surplus. In the generating mode the water from the upper reservoir drives the hydro turbine to generate electricity, while in the pumping mode, water is transported from the lower to the upper reservoir for storage [95, 96].
PHES can be modeled based on its characteristics such as the size of its reservoirs, water flow rate, volume of water stored, type of pumps and turbines as seen in Table 2 and expressed in Eqs. (5, 6, 7, 8).
During pumping mode, the electrical power used by the pump is expressed as in (5).
where \(P_{input}\) defines the motor’s input power, and \(\eta_{m}\) the motor’s efficiency.
The flow rate QP of water in (m3/s) is expressed in Eq. (6):
where \(\rho\) is the water density in (kg/m3), g is gravitational acceleration in (m/s2), H is the height difference between the two reservoirs in (m), and \(\eta_{p}\) is the pump efficiency.
During times of energy deficiency, the hydro turbine converts the potential energy \(P_{HT}\) of water in the upper reservoir to electrical power \(E_{HT}\) as expressed in Eqs. (7) and (8).
where \(\eta_{ht}\) is the efficiency of the hydro turbine, and V is the volume of the upper reservoir in (m3).
Flywheel energy storage
Flywheel energy storage is an electro-mechanical storage system that offers numerous advantages such as environmental friendliness and reduced maintenance cost while providing synchronous inertia to the grid [97]. It is usually used in hybridized forms such as BESS-FES, and DIESEL-FES and can be modeled based on its mass and rotational speed [98,99,100,101].
Equations (9) and (10) give the expression of the kinetic energy stored and the moment of inertia in FES.
where E defines the kinetic energy of the flywheel in Joules, J defines the moment of inertia of the flywheel in (kg.m2), k defines the shape factor, \(\rho\) defines the density of rotor material in (Kg/m3), h defines the height of the rotor(m), \(\omega\) defines the angular velocity of the rotor in (rad/s), m defines the mass in kg of the cylindrical rotor, and r defines the radius of the cylindrical rotor in (m).
Supercapacitor storage system
Supercapacitor storage system is an efficient energy storage system often used in power systems and desired for providing virtual inertia in the grid through a control strategy. It can also be used in hybridized forms such as PV-SCES and WIND-SCES [102, 103].
SCES are desired in power system because of their winsome characteristics such as high efficiency and long life cycle. The energy stored in SCES is given as in Eq. (11). Equations (12–13) define the SoC and DoD of the SCES, respectively.
where C is the capacitance and V is the capacitor’s voltage.
where \(E_{inst}\) is the instantaneous energy capacity of the SCES, and \(E_{rated}\) is the rated energy capacity of the SCES.
where Edischarge is the energy consumed by the load which is a function of the load power \(P_{load}\) and discharge duration T in seconds. Table 3 gives the summarized characteristics of various storage systems used in power system.
The concept of inertia in power system
In this section, a detailed mathematical representation of system inertia is given. Furthermore, a concise review of inertia estimation techniques is provided.
Analytical representation of inertia in power system
Inertia can be defined as the amount of kinetic energy stored in the rotor of synchronous generators which tends to resist changes in grid frequency, particularly during times of contingency. The inertia inherent in synchronous machines is called synchronous inertia, hence the moment of inertia of a synchronous generator can be defined as in Eq. (14).
where E defines the kinetic energy of the SGs in (MWs), J defines the moment of inertia in (Kg/m2), \(\omega\) defines the angular frequency in (rad/s), S defines the base apparent power in VA, and H is the inertia constant in seconds.
Also, from Eq. (14), H can be expressed as in Eq. (15):
Furthermore, the power imbalance can be represented using the swing equation as in Eq. (16):
Equation (16) can then be expressed in terms of torque as in Eq. (17):
where Pm defines the mechanical power developed in p.u, \(\tau_{m}\) defines the mechanical torque developed, \(\tau_{e}\) defines the electrical torque, Pe defines the electrical power output in p.u, and Pa defines the acceleration power in p.u,\(\theta\) defines the angular displacement of the rotor in rad, t is the time in seconds, f defines the supply frequency in (Hz), and df/dt is the RoCoF of the system.
From Eq. (16) and (17), we can obtain Eq. (18):
Rearranging Eq. (18) gives Eq. (19):
Replacing the angular frequency with the supply frequency and making RoCoF and inertia constant H the subject, we have Eq. (20) and (21):
Equation (20) can be modified to give Eqs. (21) which is used for designing virtual inertia controllers [67].
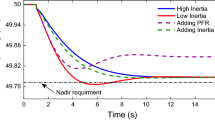
where \(H_{VI}\) is the virtual inertia constant, \(Pa_{p.u}\) is the per unit change in power, \(K_{i}\) is the virtual inertia gain, and \(\frac{{df_{p.u} }}{dt}\) is the per unit rate of change of frequency.Equation (20) show the dependence of RoCoF (df/dt) on the power change \(P_{a}\), and the inertia constant (H). It further reveals that the inertia constant is inversely proportional to RoCoF, and so the higher the inertia constant the smaller the RoCoF and vice versa. Also, RoCoF is directly proportional to the acceleration power Pa, so the greater the power imbalance the greater the RoCoF. Therefore, a reliable and resilient power system can be achieved by having high system inertia values [68, 69]. Furthermore, Fig. 3 shows the variations of frequency nadir with increasing values of system inertia, and it is seen that the higher the system inertia, the lower the frequency nadir. In light of this, frequency instability in the modern power grid can primarily be mitigated by providing adequate inertia in the grid.

Effect of system inertia on RoCoF [10]
Inertia in renewable energy-sourced power system
The effective inertia constant in the power system can be represented as the sum of the individual inertia of all connected SGs to the grid, aggregated as a single generator model. It can be expressed as in Eq. (29) [14, 40].
where Heq is the aggregated synchronous inertia in the grid, SB is the base apparent power, SB,i is the individual generator apparent power, N is the total number of connected generators, and Hi is the inertia constant of each generator.
Similarly, since the modern power system comprises a hybrid combination of synchronous generators, ESS and RE generators, hence, the total inertia in the system will comprise of the synchronous inertia provided by the synchronous generators and the virtual inertia obtained from RE generators and energy storage systems. Therefore, the effective inertia Heq in a modern power grid can be expressed as in Eq. (23), [78, 111, 115].
where Hvi,j and SB,j are the virtual inertia constant in seconds and the rated apparent power in VA of the jth virtual machine, respectively. V and N define the number of the RE generators, and synchronous generators connected in the network, respectively. If Hvi,j is very small, then the effective inertia Heq in the grid will be substantially reduced, this explains why RE dominant power grid is associated with low inertia. Table 4 gives the average inertia values of different types of power generators. It is seen from Table 4 that the inertia constant from SGs ranges between 4 and 10 s, while the virtual inertia constant from ESS is between 2 and 4 s [74]. Therefore, it can be inferred from Eq. (23), that the aggregate inertia constant of modern power system should be between 4 and 10 s to ensure stability of the modern power grid.
Inertia estimation techniques in power system
Inertia estimation in power system is important to help power operators predict futuristic frequency deviation and make appropriate control decisions [40]. This sub-section gives a review of the various inertia estimation techniques in power system while highlighting their merits and demerits.
Inertia estimation techniques discussed here are classified based on the timing of estimation. Using this criterion three main approaches will be discussed; offline or post-mortem approach, online real-time approach, and forecast or predictive approach. The offline and online techniques are the most commonly used, while the predictive approach is still being advanced.
Offline or Post-mortem inertia estimation method
This is a post-mortem disturbance-based inertia estimation method driven by historical data of large disturbance events obtained using the phasor measurement units (PMUs). PMU is a measuring system installed at generator buses to monitor power system operating conditions such as voltage phasor, current phasor, active power, frequency deviation, harmonics, and power imbalance. The data obtained from the PMU is then used to estimate the system’s inertia at discrete time instances using an appropriate algorithm. The accuracy of this method depends on the precision of the measuring system and the algorithm used for inertia estimation. This approach is however limited by inaccurate frequency measurements due to oscillatory components, as well as distortions and noises in the system, subsequently, its accuracy can be improved by eliminating noise and other distortions in the system [40, 110].
Online inertia estimation approach
Unlike the offline method, the online estimation approach is a dynamic technique that uses real-time measurements from PMUs to give continuous and discrete inertia values of the power system. Examples of online inertia estimation techniques and models are dynamic regressor extension technique, autoregressive data-centered models, sliding discrete Fourier transform, and electro-mechanical oscillation modal extraction method [10].
Challenges of this estimation approach include (1) inaccurate estimation of the total system inertia (2) extended inertia estimation time (3) large computational burdens due to large dataset.
Inertia forecasting or prediction approach
Forecasting techniques are now being used for inertia estimation due to the time-varying nature of inertia from renewable energy generators. Several forecasting models are being developed for inertia estimation such as artificial neural network (ANN) based models, linear regression models, time series models, and probabilistic inertia forecasting models [13, 111]. However, this approach is still being advanced for inertia estimation due to the changing dynamics of the modern power system.
Other unclassified approaches used for inertia estimation are the system identification approach, and the zonal inertia estimation technique. The zonal inertia estimation approach sums up the inertia from each contributing zone to give the total system inertia [13]. The summarized characteristics of different inertia estimation schemes highlighting their merits and demerit are presented in Table 5.
Virtual inertia topology and strategy in modern power grid
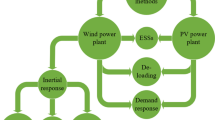
Virtual inertia control strategies help to provide artificial inertia to the grid through the use of RE sources, energy storage systems, and converters with appropriate control strategies [70]. The control strategies try to mimic the characteristics of SGs and induction machines to provide inertia virtually to the grid [71]. Figure 4 shows the virtual inertia control process in the modern grid, while Fig. 5 gives a broad classification of virtual inertia control topologies based on its modeling technique and solution method. Furthermore, Table 6 gives detailed characteristics, merits, and demerits of the different virtual inertia control topologies and strategies, while Table 7 compares key parameters among the control strategies.

Virtual inertia control system in the modern grid [10]

Virtual inertia control classification
Control equations of virtual inertia topology
The various types of inertia emulation topologies and strategies arise from the different mathematical models used to mimic the dynamics of SGs and induction machines. In this subsection, the mathematical equation which defines the different types of virtual inertia topology is given.
Swing equation-based topology
The swing equation-based topology is governed mathematically by Eq. (24) obtained by considering the damping coefficient in the conventional swing equation [40, 73].
where \(P_{m}\) is the input power, \(P_{e}\) is the output power, \(J\) is the moment of inertia,\(\omega_{{}}\) is the angular frequency, \(\omega_{ref}\) is the reference angular frequency, and \(D_{m}\) is the damping factor. The control model of the swing equation-based synchronous power controller is given in Fig. 6 with gain K and time constant Td.

Transfer function block diagram of swing equation based synchronous power controller
Frequency-power response topology
The control equation of the frequency-power response based topologies can be described by Eq. (25) [61, 73]:
where \(\frac{d\Delta \omega }{{dt}}\) is the rate of change of frequency,\(\Delta \omega\) is the change in angular frequency, K1 is the inertia constant, and KD is the damping constant. Figure 7 gives the control model of frequency-power response-based virtual synchronous generator.

Transfer function block diagram of frequency-power response-based virtual synchronous generator
Droop control topology
The droop control based topology can be represented using Eq. (26) [73, 74].
where \(\omega_{ref}\) is the reference angular frequency,\(\omega_{{}}\) is grid frequency,\(D_{p}\) is the active power droop,\(P_{m}\) is the reference active input power, \(P_{e}\) is the active output power, and \(T_{f}\) is the time constant of the low pass filter. Figure 8 shows the transfer functions block diagram of the droop control based topology.

Transfer function block diagram of droop control-based topology [74]
Operational and expansion planning optimization in power system
An overview of power system optimization methods and techniques
The increasing complexity, changing dynamics, and the need to ensure grid stability have necessitated power system researchers to focus on advanced optimization techniques that have capabilities of handling the new grid peculiarities [14, 65, 116].
Power system optimization problems can be solved using several methods. These methods can be majorly classified as exact and approximate approaches. Exact approaches are also called mathematical or classical method while approximate method uses heuristics or meta-heuristics algorithms [38, 117]. These modeling approaches are the most suited to capture the dynamics and address specific challenges of the power grid with clearly defined objective functions, decision variables, and constraints.
Mathematical optimization models can be defined by the nature of the constraints which could be linear or nonlinear. Linear optimization problems are solved using linear programming(LP) and MILP techniques, while nonlinear programming (NLP), mixed-integer nonlinear programming (MINLP), and mixed-integer quadratic programming (MIQP) are used to solve nonlinear mathematical models [118, 119].
Furthermore, complex mathematical optimization models are now being solved using algebraic modeling languages such as General Algebraic Modeling System (GAMS), Advanced Interactive Multidimensional Modeling System (AIMMS), Grid Reliability and Adequacy Risk Evaluator (GRARE) software package, Python, PLEXOS, and Multi-Area Reliability Simulation (MARS) [125, 126].
On the other hand, heuristic and meta-heuristics optimization techniques are formulated based on the social behaviors of living organisms [108]. They have shorter processing times and achieve faster convergence, however, they do not guarantee optimal solutions, unlike mathematical techniques. Examples are genetic algorithm (GA), Benders decomposition, simulated annealing, Tabu search algorithm, differential evolution, binary fireworks algorithm, particle swarm optimization (PSO), nodal ant colony optimization, evolutionary programming (EP), etc. [120,121,122,123,124]. These algorithms can also be used in hybridized forms such as GA-PSO [127].
Several optimization models and expansion planning models have also been proposed to address the peculiarities of the modern renewable energy dominant grid as seen in Tables 8 and 9. Furthermore, to account for uncertainties arising from RE sources as well as variations in load demand, robust optimization models was developed in [38, 116, 120], while stochastic optimization models and risk assessment method were adopted in [116, 128,129,130,131]. Table 8 gives an overview of operational optimization models, and techniques used to address related power system problems.
Expansion planning optimization model in power system
Expansion planning optimization models are gaining prominence in modern power system analysis due to the expected dominance of RE sources in the power grid and increasing energy demand. Expansion planning models are formulated as optimization problems with well-defined objectives and constraints [136,137,138,139]. Power system expansion planning models are mainly of three types; generation expansion planning (GEP), transmission expansion planning (TEP), and distribution expansion planning (DEP) [140, 146,147,148,149].
Generation expansion planning (GEP) problem determines the type of generators to be installed, optimal capacity of generators, location of generators, construction time of prospective generating units, and cost implications of new generators’ installations. Similarly, transmission expansion planning (TEP) problem determines the best choice for the installation of new transmission lines which aids power transfer within a planning horizon [36, 141].
The planning period for expansion could be static or dynamic (multi-period). In static expansion planning models, the decisions are made within a given target year, while dynamic expansion planning involves making decisions at different phases of the planning horizon, thus making use of a yearly representation of the investment decisions [43, 142]. Table 9 gives a summarized overview of various optimization techniques, methods, and solvers used in expansion planning models. It can be observed from Tables 7 and 8 that most optimization techniques and models only consider economic objective such as operational cost of generators, and technical objectives such as power flow, ramping limits, and voltage limits. Most models did not consider the inertia requirement of the grid which is important to ensure grid stability in renewable energy sourced power system.
Future research work
The review of the literature reveals that no study has yet considered cost, emission, and the inertia requirements of the grid in joint generation and transmission expansion planning. Therefore, in future, a new deterministic optimization model for generation and transmission expansion planning model will be developed to minimize cost and CO2 emission while maximizing the overall system inertia. Furthermore, the resilience of this new model during transient conditions will also be investigated.
Conclusion
This paper highlights the challenges associated with the modern power grid and further explains the role of inertia in ensuring frequency stability in the power grid. The following are the areas of discussion of this research: (1) A concise review of the modeling characterizes of different energy storage system used to provide inertia support to the grid. (2) Mathematical formulation of system inertia in power system. (3) overview of inertia estimation methods in power system. (4) Review of different virtual inertia control topologies and strategies highlighting their merit and demerit. (5) Review of optimization planning methods, techniques, and tools.
Findings of this study reveal the following: (1) adequate system inertia in the grid is important to mitigate frequency instability in the modern grid. (2) Disregarding inertia in power system operational and expansion planning optimization models could lead to sub-optimal optimization model. (3) Online inertia estimation technique is the most suited approach for inertia estimation in modern renewable energy-sourced grid due to the stochastic behavior of renewable energy sources. (4) Frequency-power response based topology such as VSG and VSYNC are preferred control strategies in renewable energy grid because they give better frequency stability.
In future, a new deterministic optimization model will be developed that will consider cost, CO2 emission, and the inertia requirement of the grid in planning. This model will help to increase the frequency stability of the modern power grid as well as reduce emission level.
Availability of data and materials
The datasets used and/or analyzed during the current study are available from the corresponding author on reasonable request.
Abbreviations
- RE:
-
Renewable energy
- ESS:
-
Energy storage system
- SCES:
-
Super capacitor energy storage system
- BESS:
-
Battery energy storage system
- SGs:
-
Synchronous generators
- VI:
-
Virtual inertia
- PV:
-
Photovoltaic
- VSG:
-
Virtual synchronous generator
- PHES:
-
Pumped hydro energy storage
- VOC:
-
Virtual oscillator controller
- RoCoF:
-
Rate of change of frequency
- VISMA:
-
Virtual synchronous machine
- GEP:
-
Generation expansion planning
- SPC:
-
Synchronous power controller
- GTEP:
-
Generation transmission expansion planning
- TEP:
-
Transmission expansion planning
- MILP:
-
Mixed integer linear programming
- FES:
-
Flywheel energy storage
- GSTEP:
-
Generation, storage and transmission expansion planning
- SOC:
-
State of charge
- DoD:
-
Depth of discharge
- PMUs:
-
Phasor measurement units
References
Li X, Wu X, Gui D, Hua Y, Guo P (2021) Power system planning based on CSP-CHP system to integrate variable renewable energy. Energy 232:121064
Ayamolowo OJ, Adigun SO, Manditereza PT (2020) “Short-term solar irradiance evaluation and modeling of a hybrid distribution generation system for a typical nigeria university,” IEEE PES/IAS PowerAfrica Conf.,
Ayamolowo OJ, Omo-Irabor B, Buraimoh E, Davidson IE (2020) Short-term wind variability analysis of Afe Babalola University. In: 2020 Clemson University power systems conference (PSC) 2020 Mar 10 (pp. 1–8). IEEE
Ayamolowo OJ, Buraimoh E, Salau AO, Dada JO (2019) Nigeria Electricity Power Supply System: The Past, Present and the Future. In2019 IEEE PES/IAS PowerAfrica 2019 Aug 20 (pp. 64–69). IEEE
Ayamolowo OJ, Salau AO, Wara ST 2019 The power industry reform in Nigeria: the journey so far. In: 2019 IEEE PES/IAS PowerAfrica 2019 Aug 20 (pp. 12–17). IEEE
Ayamolowo OJ, Manditereza PT, Kusakana K (2021) Investigating the potential of solar trackers in renewable energy integration to grid. In: Journal of Physics: Conference Series Sep 1 (Vol. 2022, No. 1, p. 012031). IOP Publishing
Li HX, Zhang Y, Li Y, Huang J, Costin G, Zhang P (2021) “Exploring payback-year based feed-in tariff mechanisms in Australia. Energy Policy 150:112133
Amin M, Rad V, Toopshekan A, Rahdan P, Kasaeian A, Mahian O (2020) “A comprehensive study of techno-economic and environmental features of different solar tracking systems for residential photovoltaic installations. Renew Sustain Energy Rev 129:109923
Hamwi M, Lizarralde I, Legardeur J (2021) Demand response business model canvas: a tool for flexibility creation in the electricity markets. J Clean Prod 1(282):124539
Makolo P, Zamora R, Lie T (2021) The role of inertia for grid flexibility under high penetration of variable renewables - A review of challenges and solutions. Renew. Sustain. Energy Rev 147:111223
Rajan R, Fernandez FM, Yang Y (2021) Primary frequency control techniques for large-scale PV-integrated power systems: a review. Renew. Sustain Energy Rev 144:110998
Trovato V (2021) The impact of spatial variation of inertial response and flexible inter-area allocation of fast frequency response on power system scheduling. Electr Power Syst Res 198:107354
Heylen E, Teng F, Strbac G (2021) Challenges and opportunities of inertia estimation and forecasting in low-inertia power systems. Renew Sustain Energy Rev 147:111176
Mehigan L, Al D, Deane P (2020) Renewables in the European power system and the impact on system rotational inertia. Energy. https://doi.org/10.1016/j.energy.2020.117776
Dixon A (2019) “Challenges of operating systems with high penetrations of systems. Modern aspect of power system frequency stability and control”. Elsevier, Armsterdam, pp 245–269
Safari A, Farrokhifar M, Shahsavari H, Hosseinnezhad V (2021) Stochastic planning of integrated power and natural gas networks with simplified system frequency constraints. Int J Electr Power Energy Syst 132:107144
Zhang X et al (2020) Optimized virtual inertia of wind turbine for rotor angle stability in interconnected power systems. Electr. Power Syst. Res. 180:106157
Faridpak B, Farrokhifar M, Murzakhanov I, Safari A (2020) A series multi-step approach for operation Co-. Energy 204:117897
Yap KY, Lim JM, Sarimuthu CR (2021) A novel adaptive virtual inertia control strategy under varying irradiance and temperature in grid-connected solar power system. Int J Electr Power Energy Syst 132:107180
Wilson D, Yu J, Al-Ashwal N, Heimisson B, Terzija V (2019) Measuring effective area inertia to determine fast-acting frequency response requirements. Int J Electr Power Energy Syst 1(113):1–8
Akram U, Nadarajah M, Shah R, Milano F (2020) A review on rapid responsive energy storage technologies for frequency regulation in modern power systems. Renew Sustain Energy Rev 120:109626
Sarojini K, Palanisamy K, Yang G (2020) Future low-inertia power systems: requirements, issues, and solutions - A review. Renew Sustain Energy Rev 124:109773
Kerdphol T, Rahman FS, Watanabe M, Mitani Y, Turschner D, Beck H (2019) Enhanced Virtual Inertia Control Based on Derivative Technique to Emulate Simultaneous Inertia and Damping Properties for Microgrid Frequency Regulation. IEEE Access 7(January):14422–14433
Yang L, Hu Z, Xie S, Kong S, Lin W (2019) Adjustable virtual inertia control of supercapacitors in PV-based AC microgrid cluster. Electr Power Syst Res 173(January):71–85
Mandal R, Chatterjee K (2021) Virtual inertia emulation and RoCoF control of a microgrid with high renewable power penetration. Electr. Power Syst. Res. 194:107093
Nycander E, Söder L, Olauson J, Eriksson R (2020) Curtailment analysis for the nordic power system considering transmission capacity, inertia limits and generation flexibility. Renew Energy. https://doi.org/10.1016/j.renene.2020.01.059
Johnson SC, Rhodes JD, Webber ME (2020) Understanding the impact of non-synchronous wind and solar generation on grid stability and identifying mitigation pathways. Appl Energy 262:114492
Harold O, Taylor P, Jones D, Mcentee T, Wade N (2014) An international review of the implications of regulatory and electricity market structures on the emergence of grid scale electricity storage. Renew Sustain Energy Rev 38:489–508
Fini MH, Esmail M, Golshan H (2018) Determining optimal virtual inertia and frequency control parameters to preserve the frequency stability in islanded microgrids with high penetration of renewables. Electr Power Syst Res 154:13–22
Magdy G, Ali H, Xu D (2021) A new synthetic inertia system based on electric vehicles to support the frequency stability of low-inertia modern power grids. J Clean Prod 297:126595
Ayamolowo OJ, Manditereza PT, Kusakana K (2020) Exploring the gaps in renewable energy integration to grid. Energy Rep 1(6):992–999
Wang Y, Jin J, Liu H, Zhang Z, Liu S, Ma J (2021) ScienceDirect The optimal emergency demand response ( EDR ) mechanism for rural power grid considering consumers ’ satisfaction. Energy Rep 7:118–125
Zakernezhad H, Setayesh M, Sha M, Catal PS (2021) Multi-level optimization framework for resilient distribution system expansion planning with distributed energy resources demand response program providers. Energy. https://doi.org/10.1016/j.energy.2020.118807
Astriani Y, Shafiullah GM, Shahnia F (2021) Incentive determination of a demand response program for microgrids. Appl Energy 292:116624
Pourmoosavi M, Amraee T, Fotuhi M (2021) Expansion planning of generation technologies in electric energy systems under water use constraints with renewable resources. Sustain Energy Tech Assess 43:100828
Li C, Conejo AJ, Liu P, Omell BP, Siirola JD, Grossmann IE (2021) Mixed-integer linear programming models and algorithms for generation and transmission expansion planning of power systems. Eur J Oper Res 297(3):1071–82
Asadi A, Farjah E, Rastegar M, Bacha S (2021) Generation and transmission expansion planning for bulk renewable energy export considering transmission service cost allocation. Electr Power Syst Res 196:107197
Abdi H (2021) Profit-based unit commitment problem: a review of models, methods, challenges, and future directions Total revenue. Renew Sustain Energy Rev 138:110504
Gao S, Hu B, Xie K, Niu T, Li C, Yan J (2021) Spectral clustering based demand-oriented representative days selection method for power system expansion planning. Int J Electr Power Energy Syst 1(125):106560
Makolo P, Oladeji I, Zamora R, Lie T (2021) Data-driven inertia estimation based on frequency gradient for power systems with high penetration of renewable energy sources. Electr Power Syst Res 195:107171
Wogrin S, Tejada-arango D, Delikaraoglou S, Botterud A (2020) Assessing the impact of inertia and reactive power constraints in generation expansion planning. Appl Energy. https://doi.org/10.1016/j.apenergy.2020.115925
Li Y et al (2021) Optimal generation expansion planning model of a combined thermal – wind – PV power system considering multiple boundary conditions : a case study in Xinjiang, China. Energy Rep 7:515–522
Fitiwi DZ, Lynch M, Bertsch V (2020) Enhanced network effects and stochastic modelling in generation expansion planning : Insights from an insular power system. Socioecon Plann Sci 71:100859
Firoozjaee MG, Sheikh-el-eslami MK (2021) A hybrid resilient static power system expansion planning framework. Int J Electr Power Energy Syst 133:107234
Kim G, Hur J (2021) Probabilistic modeling of wind energy potential for power grid expansion planning. Energy 230:120831
Kazemi M, Ansari MR (2022) An integrated transmission expansion planning and battery storage systems placement - A security and reliability perspective. Int J Electr Power Energy Syst 134:107329
Larsen M, Sauma E (2021) Economic and emission impacts of energy storage systems on power-system long-term expansion planning when considering multi-stage decision processes. J Energy Storage 33:101883
Moradi-sepahvand M, Amraee T (2021) Integrated expansion planning of electric energy generation, transmission, and storage for handling high shares of wind and solar power generation. Appl Energy 298:117137
Qorbani M, Amraee T (2021) Long term transmission expansion planning to improve power system resilience against cascading outages. Electr Power Syst Res 192:106972
Ramkumar A, Rajesh K (2021) Generation expansion planning with wind power plant using DE algorithm. Mater Today Proc. https://doi.org/10.1016/j.matpr.2021.06.123
Bakhshi H, Safari A, Guerrero JM (2021) A multi-objective mixed integer linear programming model for integrated electricity-gas network expansion planning considering the impact of photovoltaic generation. Energy 222:119933
Pereira A, Sauma E (2020) Power systems expansion planning with time-varying CO 2 tax ✩. Energy Policy. https://doi.org/10.1016/j.enpol.2020.111630
Quiroga D, Sauma E, Pozo D (2019) Power system expansion planning under global and local emission mitigation policies. Appl Energy 239(February):1250–1264
Franco JF, Dias T, Lima D, Tabares A, Ba N (2021) Investment & generation costs vs CO2 emissions in the distribution system expansion planning : a multi-objective stochastic programming approach. Int J Electr Power Energy Syst. https://doi.org/10.1016/j.ijepes.2021.106925
Rosende C, Sauma E, Harrison GP (2019) Effect of climate change on wind speed and its impact on optimal power system expansion planning : the case of Chile. Energy Econ 80:434–451
Pinto RS, Unsihuay-vila C, Tabarro FH (2021) Coordinated operation and expansion planning for multiple microgrids and active distribution networks under uncertainties. Appl Energy 297(May):117108
Costa RND, Paucar VL (2021) “Results in control and optimization a multi-objective optimization model for robust tuning of wide-area PSSs for enhancement and control of power system angular stability. Results Control Optim 3(April):100011
Lavr V, Zdenˇek M (2021) A comparative analysis of a power system stability with virtual inertia. Energies. https://doi.org/10.3390/en14113277
Hong Q et al (2021) Active support of power system to energy transition — Perspective addressing frequency control challenges in future low-inertia power systems : a Great Britain perspective. Engineering. https://doi.org/10.1016/j.eng.2021.06.005
Soliman MH, Talaat HEA, Attia MA (2021) Power system frequency control enhancement by optimization of wind energy control system. Ain Shams Eng J. https://doi.org/10.1016/j.asej.2021.03.027
Ullah K, Basit A, Ullah Z, Aslam S (2021) “Automatic generation control strategies in conventional and modern power systems: a comprehensive overview. Energies. https://doi.org/10.3390/en14092376
Emmanuel M, Doubleday K, Cakir B, Markovi M, Hodge B (2020) A review of power system planning and operational models for fl exibility assessment in high solar energy penetration scenarios. Sol Energy 210(June):169–180
Singh K (2021) Enhancement of frequency regulation in tidal turbine power plant using virtual inertia from capacitive energy storage system. J Energy Storage 35:102332
Mimica M, Dominković DF, Capuder T, Krajačić G (2021) On the value and potential of demand response in the smart island archipelago. Renew Energy 1(176):153–168
Xing W, Wang H, Lu L, Han X, Sun K, Ouyang M (2021) An adaptive virtual inertia control strategy for distributed battery energy storage system in microgrids. Energy 233:121155
Ariyaratna P, Muttaqi KM, Sutanto D (2018) A novel control strategy to mitigate slow and fast fluctuations of the voltage profile at common coupling Point of rooftop solar PV unit with an integrated hybrid energy storage system. J Energy Storage 20(October):409–417
Zhong C, Zhou Y, Yan G (2021) Power reserve control with real-time iterative estimation for PV system participation in frequency regulation. Electr. Power Energy Syst. 124:106367
Zhang Y, Zhang X, Qian T, Hu R (2020) Modeling and simulation of a passive variable inertia flywheel for diesel generator. Energy Rep 6:58–68
Rehimi S, Mirzaei R, Bevrani H (2020) Interconnected microgrids frequency response model: AN inertia-based approach. Energy Rep 6:179–186
Fan G, Yang F, Guo P, Xue C, Gholami S (2021) A new model of connected renewable resource with power system and damping of low frequency oscillations by a new coordinated stabilizer based on modified multi-objective optimization algorithm. Sustain Energy Tech Assess 47:101356
Rapizza MR, Canevese SM (2020) Fast frequency regulation and synthetic inertia in a power system with high penetration of renewable energy sources: optimal design of the required quantities ✩. Sustain Energy, Grids Networks 24:100407
Magnus DM, Scharlau CC, Pfitscher LL, Costa GC, Silva GM (2021) A novel approach for robust control design of hidden synthetic inertia for variable speed wind turbines. Electr. Power Syst. Res. 196(April):107267
Tamrakar U, Shrestha D, Maharjan M, Bhattarai BP (2017) Virtual inertia: current trends and future directions. Appl Sci. https://doi.org/10.3390/app7070654
Rahman FS, Kerdphol T, Watanabe M, Mitani Y (2019) Optimization of virtual inertia considering system frequency protection scheme. Electr Power Syst Res 170(January):294–302
Kumar NK, Gandhi VI, Ravi L, Vijayakumar V, Subramaniyaswamy V (2020) Improving security for wind energy systems in smart grid applications using digital protection technique. Sustain Cities Soc 60:102265
Qaeini S, Setayesh M, Varasteh F, Shafie-khah M (2020) Combined heat and power units and network expansion planning considering distributed energy resources and demand response programs. Energy Convers Manag 211(December):112776
Saarinen L, Norrlund P, Yang W, Lundin U (2018) Linear synthetic inertia for improved frequency quality and reduced hydropower wear and tear. Electr. Power Energy Syst. 98(October):488–495
Tielens P, Van Hertem D (2020) The relevance of inertia in power systems. Renew Sustain Energy Rev 55(2016):999–1009
Samanta S, Mishra JP, Roy BK (2019) Implementation of a virtual inertia control for inertia enhancement of a DC microgrid under both grid connected and isolated operation. Comput Electr Eng 76:283–298
Vatanpour M, Sadeghi A (2018) The impact of energy storage modeling in coordination with wind farm and thermal units on security and reliability in a stochastic unit commitment. Energy 162:476–490
Li P et al (2021) Stochastic robust optimal operation of community integrated energy system based on integrated demand response. Int J Electr Power Energy Syst 128(June):106735
Castro LM, Tovar-hern JH, Gonz N, Guzm JS, El I (2021) Unit commitment for multi-terminal VSC-connected AC systems including BESS facilities with energy time-shifting strategy. Int J Electr Power Energy Syst 134(June):2022
Masoumi-amiri SM, Shahabi M, Barforoushi T (2021) Interactive framework development for microgrid expansion strategy and distribution network expansion planning. Sustain Energy, Grids Networks 27:100512
Wang W, Li Y, Shi M, Song Y (2021) Optimization and control of battery- flywheel compound energy storage system during an electric vehicle braking. Energy 226:120404
Alem A et al (2021) Techno-economic analysis of lithium-ion and lead-acid batteries in stationary energy storage application. J Energy Storage 40:102748
Rahman M, Oni AO, Gemechu E, Kumar A (2020) The development of techno-economic models for the assessment of utility-scale electro-chemical battery storage systems. Appl Energy 283(May):116343
Steckel T, Kendall A, Ambrose H (2021) Applying levelized cost of storage methodology to utility-scale second-life lithium-ion battery energy storage systems. Appl. Energy 300(January):117309
Shabani M, Dahlquist E, Wallin F, Yan J (2020) Techno-economic comparison of optimal design of renewable-battery storage and renewable micro pumped hydro storage power supply systems: A case study in Sweden ☆. Appl Energy 279(August):115830
Poncelet K, Delarue E, William D (2020) Unit commitment constraints in long-term planning models: Relevance, pitfalls and the role of assumptions on flexibility. Appl. Energy 258(November):113843
Baldinelli A, Barelli L, Bidini G (2019) Progress in renewable power exploitation: reversible solid oxide cells- flywheel hybrid storage systems to enhance flexibility in micro-grids management. J Energy Storage 23(March):202–219
da Silva LL, Quartier M, Buchmayr A, Sanjuan-Delmás D, Laget H, Corbisier D, Mertens J, Dewulf J (2021) Life cycle assessment of lithium-ion batteries and vanadium redox flow batteries-based renewable energy storage systems. Sustain Energy Tech Assess 1(46):101286
Jiang Y, Kang L, Liu Y (2020) Optimal configuration of battery energy storage system with multiple types of batteries based on supply-demand characteristics. Energy 206:118093
Nyeche EN, Diemuodeke EO (2020) Modelling and optimisation of a hybrid PV-wind turbine-pumped hydro storage energy system for mini-grid application in coastline communities. J Clean Prod 250:119578
Al-masri HMK, Magableh SK, Abuelrub A, Alzaareer K (2021) Realistic coordination and sizing of a solar array combined with pumped hydro storage system. J. Energy Storage 41(February):102915
Mousavi N, Kothapalli G, Habibi D, Das CK, Baniasadi A (2020) Modelling, design, and experimental validation of a grid-connected farmhouse comprising a photovoltaic and a pumped hydro storage system. Energy Convers. Manag. 210(February):112675
S. Lin, T. Ma, and M. S. Javed, “Prefeasibility study of a distributed photovoltaic system with pumped hydro storage for residential buildings,” Energy Convers. Manag., vol. 222, no. February, p. 113199, 2020.
Arani AAK, Karami H, Gharehpetian GB, Hejazi MSA (2017) Review of flywheel energy storage systems structures and applications in power systems and microgrids. Renew Sustain Energy Rev 69(November):9–18
Rahman M, Gemechu E, Oni AO, Kumar A (2021) The development of a techno-economic model for the assessment of the cost of flywheel energy storage systems for utility-scale stationary applications. Sustain. Energy Technol. Assessments 47(January):101382
Wang Y, Wang C, Xue H (2021) A novel capacity configuration method of flywheel energy storage system in electric vehicles fast charging station. Electr Power Syst Res 195(February):107185
Kondoh J, Funamoto T, Nakanishi T, Arai R (2018) Energy characteristics of a fixed-speed flywheel energy storage system with direct grid-connection. Energy 165:701–708
Miyamoto RK, Goedtel A, Castoldi MF (2020) A proposal for the improvement of electrical energy quality by energy storage in fly wheels applied to synchronized grid generator systems. Electr Power Energy Syst 118(November):105797
Jami M, Shafiee Q, Gholami M, Bevrani H (2020) Control of a super-capacitor energy storage system to mimic inertia and transient response improvement of a direct current micro-grid. J Energy Storage 32(August):101788
Shimizu T, Underwood C (2013) Acta astronautica super-capacitor energy storage for micro-satellites: feasibility and potential mission applications. Acta Astronaut 85:138–154
Li J, Zhao J (2021) Automation in construction energy recovery for hybrid hydraulic excavators: flywheel-based solutions. Autom Constr 125(June):103648
Satpathy S, Das S, Kumar B (2020) How and where to use super-capacitors effectively, an integration of review of past and new characterization works on super-capacitors. J Energy Storage 27(November):101044
Shahzad M, Ma T, Jurasz J, Yasir M (2020) Solar and wind power generation systems with pumped hydro storage: Review and future perspectives. Renew Energy 148:176–192
Shahzad M, Zhong D, Ma T, Song A, Ahmed S (2020) Hybrid pumped hydro and battery storage for renewable energy based power supply system. Appl. Energy 257(October):114026
Vasudevan KR, Ramachandaramurthy VK, Venugopal G, Ekanayake B, Tiong SK (2021) Variable speed pumped hydro storage: A review of converters, controls and energy management strategies. Renew Sustain Energy Rev 135(August):110156
Aneke M, Wang M (2016) Energy storage technologies and real life applications – A state of the art review. Appl Energy 179:350–377
Zhang X et al (2020) Optimized virtual inertia of wind turbine for rotor angle stability in interconnected power systems. Electr Power Syst Res 180(December):106157
Fernández-guillamón A, Gómez-lázaro E, Muljadi E, Molina-garcía Á (2019) Power systems with high renewable energy sources: a review of inertia and frequency control strategies over time. Renew Sustain Energy Rev 115(September):109369
Zhao Z et al (2021) Improvement of regulation quality for hydro-dominated power system : quantifying oscillation characteristic and multi-objective optimization. Renew Energy 168:606–631
Fernández-guillamón A, Gómez-lázaro E, Muljadi E, Molina-garcía Á (2019) Power systems with high renewable energy sources: a review of inertia and frequency control strategies over time. Renew Sustain Energy Rev 115(January):109369
Sun P, Teng Y, Chen Z (2021) Robust coordinated optimization for multi-energy systems based on multiple thermal inertia numerical simulation and uncertainty analysis ☆. Appl Energy 296(2017):116982
Zhang X, Zhu Z, Fu Y, Shen W (2020) Multi-objective virtual inertia control of renewable power generator for transient stability improvement in interconnected power system. Electr Power Energy Syst 117(September):105641
Evangeline SI, Rathika P (2021) A real-time multi-objective optimization framework for wind farm integrated power systems. J. Power Sources 498(April):229914
Sun Q, Wu Z, Gu W, Zhu T, Zhong L, Gao T (2021) Flexible expansion planning of distribution system integrating multiple renewable energy sources: an approximate dynamic programming approach. Energy 226:120367
Hou W, Wei H (2021) Data-driven robust day-ahead unit commitment model for hydro / thermal / wind / photovoltaic / nuclear power systems. Electr. Power Energy Syst. 125(August):106427
Kia M, Setayesh M, Sadegh M, Heidari A, Siano P (2017) An efficient linear model for optimal day ahead scheduling of CHP units in active distribution networks considering load commitment programs. Energy 139:798–817
Lin Z, Chen H, Wu Q, Huang J, Li M, Ji T (2021) A data-adaptive robust unit commitment model considering high penetration of wind power generation and its enhanced uncertainty set. Int J Electr Power Energy Syst 129(May):106797
Daadaa M, Séguin S, Demeester K, Anjos MF (2021) An optimization model to maximize energy generation in short-term hydropower unit commitment using efficiency points. Electr Power Energy Syst 125(July):106419
Feng Z, Niu W, Wang W, Zhou J (2019) A mixed integer linear programming model for unit commitment of thermal plants with peak shaving operation aspect in regional power grid lack of flexible hydropower energy Anhui Jiangsu Zhejiang Fujian. Energy 175:618–629
Resener M et al (2019) A comprehensive MILP model for the expansion planning of power distribution systems – Part I : problem formulation. Electr Power Syst Res 170(February):378–384
Firmansyah R, Budi S, Hadi SP (2021) Multi-level game theory model for partially deregulated generation expansion planning. Energy 237:121565
Bawazir RO, Cetin NS (2020) Comprehensive overview of optimizing PV-DG allocation in power system and solar energy resource potential assessments. Energy Rep 6:173–208
Iakubovskii D, Krupenev D, Komendantova N, Boyarkin D (2021) A model for power shortage minimization in electric power systems given constraints on controlled sections. Energy Rep 7:4577–4586
Gbadamosi SL, Nwulu NI (2021) Sustainable energy, grids and networks A comparative analysis of generation and transmission expansion planning models for power loss minimization. Sustain Energy, Grids Networks 26:100456
Raya-armenta JM, Bazmohammadi N, Avina-cervantes JG, Sáez D, Vasquez JC, Guerrero JM (2021) Energy management system optimization in islanded microgrids : an overview and future trends. Renew. Sustain. Energy Rev. 149(June):111327
Liu Y, Wu L, Li J (2019) Towards accurate modeling of dynamic startup / shutdown and ramping processes of thermal units in unit commitment problems. Energy 187:115891
Nanou SI, Psarros GN, Papathanassiou SA (2021) Network-constrained unit commitment with piecewise linear AC power flow constraints. Electr. Power Syst. Res. 195(July):107121
Rad VZ, Torabi SA, Hamed Shakouri G (2019) Joint electricity generation and transmission expansion planning under integrated gas and power system. Energy 167:523–537
Yuan S, Dai C, Guo A, Chen W (2019) A novel multi-objective robust optimization model for unit commitment considering peak load regulation ability and temporal correlation of wind powers. Electr. Power Syst. Res. 169(July):115–123
Moretti L, Martelli E, Manzolini G (2020) An efficient robust optimization model for the unit commitment and dispatch of multi-energy systems and microgrids. Appl. Energy 261(May):113859
Koltsaklis NE, Dagoumas AS (2018) Incorporating unit commitment aspects to the European electricity markets algorithm: an optimization model for the joint clearing of energy and reserve markets. Appl Energy 231(April):235–258
Jiang T, Yuan C, Zhang R, Bai L, Li X, Chen H (2021) Exploiting flexibility of combined-cycle gas turbines in power system unit commitment with natural gas transmission constraints and reserve scheduling. Electr Power Energy Syst 125(August):106460
Liu J, Yang Z, Yu J, Huang J, Li W (2020) Coordinated control parameter setting of DFIG wind farms with virtual inertia control. Electr Power Energy Syst 122(February):106167
Đaković J, Krpan M, Ilak P, Baškarad T, Kuzle I (2020) Impact of wind capacity share, allocation of inertia and grid configuration on transient RoCoF: the case of the Croatian power system. Electr Power Energy Syst 121(March):106075
Chen L et al (2019) Modelling and investigating the impact of asynchronous inertia of induction motor on power system frequency response. Electr Power Energy Syst 117(June):105708
Lu C, Wang J, Yan R (2021) Multi-objective optimization of combined cooling, heating and power system considering the collaboration of thermal energy storage with load uncertainties. J. Energy Storage 40(May):102819
Asgharian V, Abdelaziz M (2020) A low-carbon market-based multi-area power system expansion planning model. Electr. Power Syst. Res. 187(March):106500
Cesar A, De Oliveira L, Miranda I, Mendonça D, Gomes F (2020) A new proposal of static expansion planning of electric power transmission systems using statistical indicators. Reliab Eng Syst Saf 200(January):106928
Gonzato S, Bruninx K, Delarue E (2021) Long term storage in generation expansion planning models with a reduced temporal scope. Appl Energy 298(May):117168
Resener M et al (2019) A comprehensive MILP model for the expansion planning of power distribution systems – Part II : numerical results. Electr Power Syst Res 170(February):317–325
Navidi M, Moghaddas-tafreshi SM, Mohammad A (2021) A semi-decentralized framework for simultaneous expansion planning of privately owned multi-regional energy systems and sub-transmission grid. Int J Electr Power Energy Syst 128(June):106795
Maluenda B, Negrete-pincetic M, Olivares DE, Lorca Á (2018) Expansion planning under uncertainty for hydrothermal systems with variable resources. Electr Power Energy Syst 103(September):644–651
Ayamolowo OJ, Salau AO, Mmonyi CA, Ajibade AO, Akinwumi AJ, Onifade OA (2018) Energy audit and reliability analysis of power distribution system: a case study of Afe Babalola University. In: 2019 IEEE AFRICON 2019 Sep 25 (pp. 1–8)
Ayamolowo OJ, Manditereza PT, Kusakana K (2022) South Africa power reforms: The Path to a dominant renewable energy-sourced grid. Energy Rep 1(8):1208–1215
Ayamolowo OJ, Ilemobola T, Gbadamosi SL, Dada JO (2021) Harmonics estimation in power distribution system: the case of a Nigeria University. In: 2021 1st International conference on multidisciplinary engineering and applied science (ICMEAS) 2021 Jul 15 (pp. 1–6)
Ayamolowo OJ, Mmonyi CA, Adigun SO, Onifade OA, Adeniji KA, Adebanjo AS (2021) Reliability analysis of power distribution system: A case study of mofor injection substation, Delta State, Nigeria. In:” 2019 IEEE AFRICON Sep 25 (pp. 1–6)
Acknowledgements
The author acknowledgement the support of the management of Central University of Technology.
Funding
The authors received no funding for this research.
Author information
Authors and Affiliations
Contributions
AOJ was involved in conceptualization, and prepared initial paper draft. PM helped in editing and KK helped in proof reading. We hereby declare that all the authors contributed to this research, and the manuscript has also been read and approved by all authors.
Corresponding author
Ethics declarations
Competing interests
The authors declare that they have no competing interest.
Additional information
Publisher's Note
Springer Nature remains neutral with regard to jurisdictional claims in published maps and institutional affiliations.
Rights and permissions
Open Access This article is licensed under a Creative Commons Attribution 4.0 International License, which permits use, sharing, adaptation, distribution and reproduction in any medium or format, as long as you give appropriate credit to the original author(s) and the source, provide a link to the Creative Commons licence, and indicate if changes were made. The images or other third party material in this article are included in the article's Creative Commons licence, unless indicated otherwise in a credit line to the material. If material is not included in the article's Creative Commons licence and your intended use is not permitted by statutory regulation or exceeds the permitted use, you will need to obtain permission directly from the copyright holder. To view a copy of this licence, visit http://creativecommons.org/licenses/by/4.0/.
About this article

Cite this article
Ayamolowo, O.J., Manditereza, P. & Kusakana, K. An overview of inertia requirement in modern renewable energy sourced grid: challenges and way forward. Journal of Electrical Systems and Inf Technol 9, 11 (2022). https://doi.org/10.1186/s43067-022-00053-2
Received:
Accepted:
Published:
DOI: https://doi.org/10.1186/s43067-022-00053-2