
Abstract
In this paper, an overview of several strategies for fault ride-through (FRT) capability improvement of a doubly-fed induction generator (DFIG)-based wind turbine is presented. Uncertainties and parameter variations have adverse effects on the performance of these strategies. It is desirable to use a control method that is robust to such disturbances. Auto disturbance rejection control (ADRC) is one of the most common methods for eliminating the effects of disturbances. To improve the performance of the conventional ADRC, a modified ADRC is introduced that is more robust to disturbances and offers better responses. The non-derivability of the fal function used in the conventional ADRC degrades its efficiency, so the modified ADRC uses alternative functions that are derivable at all points, i.e., the odd trigonometric and hyperbolic functions (arcsinh, arctan, and tanh). To improve the efficiency of the proposed ADRC, fuzzy logic and fractional-order functions are used simultaneously. In fuzzy fractional-order ADRC (FFOADRC), all disturbances are evaluated using a nonlinear fractional-order extended state observer (NFESO). The performance of the suggested structure is investigated in MATLAB/Simulink. The simulation results show that during disturbances such as network voltage sag/swell, using the modified ADRCs leads to smaller fluctuations in stator flux amplitude and DC-link voltage, lower variations in DFIG velocity, and lower total harmonic distortion (THD) of the stator current. This demonstrates the superiority over conventional ADRC and a proportional-integral (PI) controller. Also, by changing the crowbar resistance and using the modified ADRCs, the peak values of the waveforms (torque and currents) can be controlled at the moment of fault occurrence with no significant distortion.
Similar content being viewed by others

1 Introduction
Because of the decrease in non-renewable fuel sources, the need for renewable energy sources, e.g., wind energy, has increased [1]. The addition of 93.6 GW of wind energy in 2021 increased its global cumulative capacity to 837 GW, representing a growth of 12% over the previous year. The global wind energy market is expected to grow by an average of 6.6% per year over the next five years [2]. Currently, wind projects are large enough to affect transmission network security, performance, and planning.
Despite the existence of other topologies such as synchronous and induction machines, the DFIG has become popular in the energy market because of its many benefits such as low converter rating, high power efficiency, good power quality, low losses, and small size of power electronics devices. These advantages lead to reduced investment costs, improved power factor, and separate adjustments of active and reactive power [3,4,5,6,7,8,9]. Therefore, the DFIG is a good choice for connecting wind turbines to the grid.
Over the years, wind power technology has been advancing by increasing the diameter of the rotor and using power electronic devices to operate at variable velocity, while seeking to absorb the maximum possible energy from the wind [10]. Variable speed wind turbines (VSWTs) have many benefits over fixed speed, e.g., the elimination of network disturbances is improved, and the problem of flickering is reduced [11,12,13]. VSWTs can be based on a direct drive synchronous generator or a DFIG. In the direct drive type, no gearbox is required, so its operating speed is equal to the rotational speed of the blades, while the power of the converters is equal to the rated generator power. On the other hand, there is a need for a gearbox if using a DFIG, but the power of the converters is about 20–30% of the rated generator power (if the turbine speed is in the range of ± 20–30% of its rated value) [14, 15]. The converters and controllers are selected according to which of these structures is used.
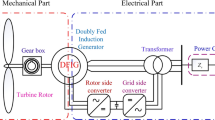
In a DFIG, the stator is connected directly to the network while the rotor is connected to the network via a back-to-back converter, i.e., a rotor side converter (RSC) and a grid side converter (GSC). In this case, the main goal of the converter connected to the rotor terminal, i.e., the RSC, is to maximize the energy absorbed from the wind by controlling the power at the stator terminal [3, 16,17,18,19].
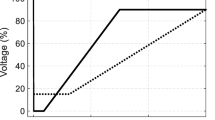
Because of the increase in electricity generation from wind energy and its injection into the power network, the transient stability of the network becomes very important. Therefore, different countries have updated their network codes to require wind turbines to stay connected to the network and provide reactive power depending on the severity and duration of the fault. In the literature, this mechanism is called fault ride-through (FRT) [20]. Any faults in the power system can lead to voltage disturbances such as voltage sag and swell. The FRT requirements of the network codes for several countries are shown in Fig. 1 [21]. The area above/below the low/high voltage ride-through line is marked such that the DFIG should remain connected to the grid, otherwise it can be disconnected from the grid. The FRT requirements for network codes are given as follows:
-
During a predetermined time for a certain level of voltage sag/swell, wind turbines must remain connected to the network.
-
During voltage sag/swell, wind turbines must generate reactive power to improve voltage stability.
-
After the fault is cleared, wind turbines must generate active power immediately to stabilize the network frequency.

FRT requirements of the network codes in several countries [21]
Considering that in a DFIG, the stator is directly connected to the network, its sensitivity to network disturbances such as voltage sag/swell is high. If for any reason, the network voltage suddenly decreases or increases, then because of the coupling between the rotor and the stator, large current can enter the rotor and induce significant overvoltage. Therefore, the RSC could be damaged by excessive voltage or current. This also negatively impacts the lifespan of the entire wind turbine system.
As shown in Fig. 2, there are two ways to enhance the FRT capability in a DFIG: (1) hardware techniques; and (2) control (software) techniques. The hardware techniques are also divided into two subgroups: (1) protection circuits and storage-based approaches; and (2) device-based reactive power injection procedures. Software techniques include traditional and advanced control methods. The advantages and disadvantages of using these methods in a DFIG are presented in Table 1.

Methods used to improve the FRT capability in the DFIG system
The protection circuits and storage-based approaches are summarized as follows:
-
Crowbar circuit [22] Crowbar is the most common technique to increase protection on the rotor side of the DFIG. Under normal operating conditions, the crowbar is not in the circuit but enters the circuit during faults to protect the RSC. This technique is simple and easy to implement. However, when the crowbar is activated, the control of active and reactive power is lost because the RSC exits the circuit. In this case, the DFIG is in an uncontrolled situation, acting as a squirrel cage induction generator and absorbing reactive power from the grid, which may lead to further voltage sag and delay in grid voltage recovery after the fault. To solve this problem, the combination of crowbar with series R-L [23], series braking resistor (SBR) [24], and DC-link chopper [24] have been suggested to keep the RSC connected during the fault so the control of active and reactive power is retained.
-
DC-link chopper The chopper acts to reduce the DC-link overvoltage. Here a resistor is installed in parallel with the DC-link to keep the DC-link voltage within an acceptable range by dissipating excessive energy. If only the chopper is used to protect the DFIG during the faults, then the rotor overcurrent will still flow through the RSC diodes and cause damage. Also, the time required for disengagement and restoration of the RSC is longer than with the crowbar circuit, since the chopper does not help to demagnetize the DFIG after the fault [25].
-
Energy-storage based technique An energy storage system (ESS) stores excess energy during the fault and sends it back to the network after fault clearance to reduce DC-link voltage fluctuations [26]. The advantage of this technique is that it works without switching in different operating conditions, so there is no transient process related to switching. In addition, the control of the system is continuous. The disadvantage of using an ESS is that to effectively control the rotor current during the fault, the RSC capacity must be increased to prevent its damage, leading to cost increase.
-
Series dynamic braking resistor (SDBR) SDBR is installed in series at the rotor/stator terminal and is equipped with a bypass power electronic switch. During the fault, SDBR attenuates the stator flux thus further attenuating the rotor voltage and current to protect the DFIG. However, using SDBR increases losses [24].
-
Series grid side converter (SGSC) SGSC is an extra converter that connects in series with the stator on the AC side, while its DC side is connected to the DC-link in the DFIG system. The SGSC output voltage is adjusted to control the voltage of the stator, so as to assist the DFIG in overcoming voltage sag and decrease/remove the transient DC and negative sequence of flux [27].
-
Fault current limiter (FCL) FCLs have been used in the connection of networks to each other to limit fault currents [28], while such devices are now being used to limit overcurrent in DFIG converters. Superconducting fault current limiters (SFCLs) can limit fault currents based on their quenching mode. These devices do not add any impedance to the network in normal operation. During a fault, they switch from superconducting to quenching mode and limit overcurrent in a unique way [29].
The reactive power injection equipment to improve FRT capability in the DFIG system is divided into three groups: (1) shunt compensators; (2) series compensators; and (3) hybrid compensators. The first category is summarized as follows:
-
Static VAR compensator (SVC) An SVC consists of an inductor and a capacitor, and its reactive power exchanged with the grid is smoothly controlled by thyristors. Therefore, the bus voltage connected to the SVC can be adjusted. Since SVCs can compensate for the reactive power, they are used to stabilize the grid voltage [30].
-
Static synchronous compensator (STATCOM) In large wind farms, a STATCOM is used with induction generators for fault recovery. In the steady state, maintaining the bus voltage and preventing fluctuations are important issues, so a STATCOM helps to achieve this goal by injecting/absorbing reactive power. In transient modes, the STATCOM injects maximum reactive current into the grid to help recover voltage. Compared to an SVC, a STATCOM has better transient response and the ability to run overload capability. However, the cost of a STATCOM is high [30, 31].
The second category (series compensators) is summarized as follows:
-
Dynamic voltage restorer (DVR) A DVR includes a voltage source converter that is used to regulate the AC voltage. This device is connected in series between the wind turbine and the network through a coupling transformer that has an energy source and contains filters for harmonic suppression. There is no need to use complicated methods to control the DFIG converters. The structure of a DVR is similar to a static synchronous series compensator that performs direct voltage control and includes a capacitive bank and an energy storage device. This equipment is used to improve FRT capability. Although it is expensive to use a DVR for FRT, it can effectively eliminate transient generator current and power during network faults [32].
-
Magnetic energy recovery switch (MERS) A series compensation using MERS is composed of four electronic switches and a DC-link capacitor. This structure has two series converter terminals. The MERS is used to improve FRT capability in squirrel cage induction generator-based wind turbines. This equipment injects harmonics into the line current, whose effects do not cause an acute problem but do interfere with the grid resonance frequency. More study is needed to prevent this disturbance [33]. The use of this device to improve FRT capability in a DFIG has not been widely studied and further investigation is necessary.
The third category, a hybrid compensator, performs better than the previous two categories. Since it conducts both series and parallel compensation, it can reduce various power quality problems. The back-to-back structure of converters is known as a unified power quality conditioner (UPQC) [34]. The unified power flow conditioner (UPFC) has a similar structure to a UPQC, except that the UPFC and UPQC are used in transmission and distribution systems, respectively. Limiting the fault current is an important issue in a network, as a large fault current causes voltage sag at the point of common coupling, and this affects the load in other feeders. Simultaneous use of a UPQC and an FCL leads to good clearance of voltage drop with small spikes in load voltage [35].
The traditional control methods are given below.
-
Blade pitch orientation control By wind velocity variations, the blade pitch orientation is changed by the controller to regulate the rotor velocity, limit the power extracted from the wind and prevent damage to the wind turbine and DFIG system. The wind turbine output torque is used to control angular velocity and, consequently, mechanical power. Wind turbines with large-scale generators are used with a pitch orientation controller to support the generators against abrupt wind variations. This controller can also reduce frequency deviations to help power stabilization. The traditional pitch orientation controller used during normal operation compares the generator output power with the nominal value and regulates the pitch orientation when the wind velocity exceeds the nominal. In addition, some controllers determine the desired pitch orientation reference by comparing the velocities [36].
-
Modified vector control The most common method used to control DFIG power converters is vector control based on stator flux orientation [37]. The role of the RSC is to control the reactor power of the stator and the electromagnetic torque. To simplify the design of the current controller, the flux of the stator is usually assumed to be constant and is considered to be aligned along the d-axis of the d-q coordinate. Another feature of vector control is the separate control of active and reactive power between the GSC and the network. The role of the GSC is to maintain the voltage of the DC-link. During voltage sag, the stator flux decreases because of direct connection to the network, and its q-axis component fluctuates instead of being zero. Consequently, it is necessary to study the stator flux dynamics during the implementation of the current controller. Current-based techniques such as feed-forward and transient current control, hysteresis control, and model predictive control are considered. These are used in modified vector control.
-
Hysteresis control This control block includes a feedback loop and multi-level comparators. If the error exceeds the tolerance band, switching pulses are generated. The hysteresis current controller provides an optimal function for switching. As a result, it significantly reduces the average RSC switching frequency and output current fluctuations. Since this controller uses the instantaneous values of rotor current, it is robust to disturbances such as voltage fluctuations and variations of parameters [38, 39].
-
Transient current controller by feed-forward compensator (TCCFFC) Adding the feed-forward part to a traditional current controller creates such a controller for an RSC. During the fault, this controller aligns the AC side voltage of the RSC with the transient voltage, thus reducing rotor current in transient conditions and minimizing interruptions of the crowbar. At the same time, by injecting transient compensation parts into the power and current control loops, torque fluctuations are reduced during network faults. This method also decreases the torque pulsations created by the negative sequence current [40].
The advanced control methods are as follows:
-
Sliding mode control (SMC) SMC is a nonlinear procedure based on the discontinuous control signal, which changes the system dynamics. This method controls the system for sliding at a cross-section of the normal behavior. Because of the need for a robust controller, SMC is proposed as a suitable choice for solving the FRT problem of a DFIG. The high order SMC improves the FRT capability in the DFIG because of its robustness against disturbances. The suggested SMC can command the RSC in the event of network faults to suppress fluctuations of stator reactive power and electromagnetic torque. It can also stabilize the DC-link voltage and the active output power of the entire system by controlling the GSC [41].
-
Fuzzy logic control (FLC) This controller can control the power flow of the DFIG system. It includes linguistic rules designed without any information on the precise parameters of the system as is needed in the setting of a traditional PI controller. By applying a fuzzy controller to the DFIG stator, the active and reactive powers are controlled separately. Comparing FLC with SMC demonstrates good efficiency in regulating active and reactive power and suppression of DC-link overvoltage during network faults. Thus, fuzzy control creates a new arena for improving the FRT capability in a DFIG [41, 42].
-
Model predictive control (MPC) The exponential expansion of processors for network analysis leads to the use of predictive control. An objective function is specified, and MPC is the vector of voltage that minimizes this function. MPC, based on a limited control situation, uses confined switching modes of the converter to solve the system optimization problem. The switching operation minimizes a specific objective function and is used for the power converter, so there is no need for a modulator. This method also takes into account nonlinear factors and system constraints. Therefore, MPC-based methods can significantly handle abnormal conditions during network faults [43, 44].
-
Auto disturbance rejection control (ADRC) In wind turbine systems, PI controllers don't operate satisfactorily during sudden wind changes. Also, the machine parameters vary due to operating conditions (such as temperature and saturation). This leads to incorrect operation of these controllers. In addition, these changes degrade the efficiency of most control methods. To reduce the effects of this problem, various optimization algorithms have been suggested in the literature. These algorithms lead to an increase in computational volume and complexity of the control methods. To solve these control problems, ADRC was introduced as an alternative. It includes three essential parts: a tracking differentiator (TD), nonlinear state error feedback (NLSEF) and an extended state observer (ESO). Because of the robustness of ADRC to changes in process parameters, it can be a valuable tool to the control engineering community. Using a feed-forward compensator and adding disturbances to the system, an integration system is created [45]. Numerous studies have suggested using different types of ADRC to improve the FRT capability in a DFIG [46,47,48], but these methods have advantages and disadvantages, as listed in Table 1.
Given that the fractional-order controller has a more robust operation than the integer-order controller [49], various fractional-order controllers have been proposed, e.g., fractional-order SMC [50, 51], fractional-order intelligent PID controller [52], fractional-order PID controller [53], etc. The main goal of ADRC is to enhance the system's robustness by using the ESO. As one of the important parts of ADRC, the ESO can estimate and eliminate the total disturbances. In [54], an ADRC including fractional-order TD (FTD), fractional-order PID controller, and fractional-order ESO (FESO) is suggested for nonlinear fractional-order projects. The stability region of a fractional-order project is flexible and can be larger or smaller than the integer-order project [55]. In [56], FESO is used to convert a generic second-order system into a cascaded fractional-order integrator so that the stability of the closed-loop system can be achieved using a proportional controller. In a fractional-order system, it is common to use a fractional-order controller for closed-loop stabilization [57]. In [58], a fractional-order ADRC based on FESO is proposed to convert the fractional-order system to a cascaded fractional-order integrator. In [59], an ADRC and fractional-order PID hybrid control for a hydro turbine speed governor system is proposed, while a new ADRC based on an improved FESO is delivered for a class of fractional-order systems [60]. To improve ADRC performance, various optimization algorithms, such as fuzzy logic, have been proposed [61, 62].
In all the above cases, if linear ADRC is used, the control circuit has a weaker performance than nonlinear ADRC. But if nonlinear ADRC is used, the non-derivability of the fal function in some points has adverse effects on control circuit performance. Some efforts have been made to solve the non-derivability problem, e.g., using alternative functions but the number of calculations is increased [62,63,64].
-
Other advanced techniques Several new control methods have been proposed to analyze and improve the FRT capability of a DFIG. In [65], an inductance-emulating control technique for a DFIG-based wind turbine is suggested to suppress the post-fault rotor current and enhance its FRT capability. A feed-forward current references control strategy for the RSC of a DFIG-based wind turbine is introduced to enhance transient control performance during grid faults [66], whereas a scaled current tracking control for an RSC is proposed to improve the behavior of the DFIG under severe grid faults without flux observation [67]. In this technique, the rotor current is controlled to track the stator current on a particular scale, and with proper tracking the overcurrent and overvoltage of the rotor are controlled during severe faults. DVR with fault current limiting function [68] and control methods based on a genetic algorithm [69] have been suggested to improve the FRT capability. The flux tracking-based control technique, presented in [70], suppresses the rotor current during the fault. A coordinated control method of the RSC and GSC using auxiliary hardware during the fault is suggested in [71], where the two controllers use a fuzzy controller tuned by genetic algorithms.
A new approach to enhance FRT capability by including a flexible FRT method is investigated through simulation in [72], in which power systems with high penetration of wind power are considered. The temporary overloading ability of the DFIG is intended to increase the protection against minor faults and prevent tripping when the crowbar is disconnected after clearing moderate faults.
Some other suggested methods to improve FRT capability in a DFIG include: storing a part of the energy captured from wind in the rotor kinetic energy [73], conversion of unbalanced energy to kinetic energy [37], a two-degree-of-freedom internal model control [74], linear quadratic output-feedback decentralized controllers for the RSC and GSC [75], coordinated control of RSC and GSC to achieve smooth torque and constant active power [76], etc.
In this work, the FRT capability in DFIG-based wind turbines is improved by modifying the structure of conventional ADRC. The main contributions of this paper include:
-
As the fal function used in conventional ADRC is not derivable at all points, it degrades its efficiency. Therefore, alternative functions to the fal function are used to improve the ADRC performance. Since the fal function is odd, odd trigonometric and hyperbolic functions (arcsinh, arctan, and tanh) are used instead. The three functions have an initial similarity with the fal function and are derivable at all points.
-
Since fractional-order functions are more controllable than integer-order functions and provide better results, these functions are used in ADRC subblocks. In addition, the coefficients of state error feedback and observer are adjusted using fuzzy logic and the Fibonacci sequence, respectively. As a result, an FFOADRC is created for the first time.
-
In the mentioned fuzzy system, instead of the error derivative, its linear combination is used to increase the performance and controllability of the FFOADRC. In this regard, stability analysis is presented.
-
The RSC and GSC vector control is conducted separately using a PI controller, conventional ADRC, and proposed FFOADRCs with different fal functions. The comparative study of these controllers is carried out and simulations are undertaken to demonstrate the robustness of FFOADRCs during network voltage sag/swell.
The rest of the paper is organized as follows: Sect. 2 describes the configuration and equations of wind turbines based on a DFIG, and the improvement of ADRC performance is expressed in Sect. 3. DFIG vector control using a PI controller, conventional ADRC, and modified ADRC is conducted in Sect. 4, whereas the simulation results are presented and analyzed in Sect. 5. In Sect. 6, stability analysis is explained, and finally, conclusions are stated in Sect. 7.
2 Configuration and equations of wind turbine system using a DFIG
The structural diagram of a DFIG-based wind generation system is presented in Fig. 3. Depending on the operating conditions, both the rotor and stator windings in a DFIG exchange power between the machine and the network. As said before, the rotor of the DFIG is fed by a back-to-back converter to work at variable velocity, i.e., the RSC and GSC. Between these two converters, there is a DC-link capacitor. RSC is used to control torque, velocity, and power factor, while the role of the GSC is to maintain the DC-link voltage under a variety of circumstances. The rating of these converters depends on the speed range of operation, while they regulate the velocity of DFIG according to the wind velocity to absorb maximum power generated.

Block diagram of the wind generation system using a DFIG [77]
The operation of DFIGs has been known for many years. They have had a significant impact on the development of wind energy projects. When using DFIG, then compared to other fixed speed wind turbines, power generation is increased by up to 30%. This decreases investment costs [77].
In this part, the VSWT model with DFIG is described, including turbine model with a focus on wind velocity and energy absorbed by the turbine, and the model of the overall system.
2.1 Wind turbine model
The turbine rotates the shaft by converting the kinetic energy of wind into mechanical torque [78]. The aerodynamic power captured by the wind turbine is given as:
where ρ is the density of air, Rt is the rotor blades radius, Vw is the wind speed, λ is the tip speed ratio, β is the pitch angle of the blades, and Cp(λ,β) is the power coefficient, which represents the maximum energy captured at each wind speed and depends on λ and β, as described by [78]:
where
The tip speed ratio is defined as:
where Ωt is the angular speed of the turbine shaft. At wind speeds less than its rated value, β is usually maintained at zero, and the peak Cp (Cp−peak) is achieved by maximizing (2) to λ. So from (2) to (3), there is:
2.2 Dynamical modeling of a DFIG
Usually, the DFIG dynamic model is presented in the d−q reference frame, which is based on either stator voltage orientation or stator flux orientation [78]. So the supply voltages, vds and vqs, and the rotor voltages, vdr and vqr, are given as:
where Rs and Rr are the stator and rotor resistances, ids and iqs are the d−q components of the stator current, idr and iqr are the d−q components of the rotor current, and ωs and ωr are the stator and rotor electrical speed, respectively. The equations of stator and rotor fluxes are given as:
where Lm is the mutual inductance, and Lr and Ls are the inductances of the rotor and stator, respectively.
According to (6), the flux equations of the DFIG in the d-q frame are given as:
The active and reactive powers of the stator are:
2.3 Drive train equations
The mechanical part of the wind generation system consists of the gearbox, high-speed shaft, and low-speed shaft. In this regard, a comprehensive study has been conducted in [79]. To implement this part, a two-mass model is used, and the related equations in per unit (pu) are [80]:
where ωt,pu and ωr,pu are the velocities of the turbine and machine in (pu), respectively. Tt,pu and Tsh,pu are the torques of the turbine and shaft in (pu), respectively. Tem,pu is the electromagnetic torque in (pu). Ht and Hg are the inertia constants of the turbine and machine in seconds. Ksh is the factor of shaft stiffness in (pu/rad), and Dsh is the damping factor in (pu). θ is the angle of shaft twist in rad., and ωb is the base angular velocity.
2.4 Modeling of back-to-back PWM converters
This converter allows bidirectional power exchange between the rotor and the network. Figure 4 presents the back−to−back PWM converters. Smn demonstrates the switching functions with m specifying the converter arms and n the rectifier/inverter. Ig, irec, and iinv are the filter current, rectifier current, and inverter current, respectively. The relations are given as [81]:
where udc is the voltage of the DC−link, C is DC−link capacitance value, Idg and Iqg are the d−q components of the filter current, Vdg and Vqg are the d−q components of the network voltage, Vdf and Vqf are the d−q components of Vf, which is the AC voltage of the rectifier output on the filter side. Rf is the filter resistance, and Lf is the filter inductance. Sdr and Sqr are the modulating signals to regulate the rectifier voltage and adjust the currents ir and ig.

Topology of the back-to-back converter [81]
3 Improvement of ADRC performance
This section first introduces the conventional ADRC. Then, with the simultaneous use of the new fal functions, fuzzy logic, and fractional-order functions, the modified ADRC is presented to enhance the performance of the DFIG control circuit during network faults.
3.1 ADRC
DFIG control with a PI controller is widely used. However, when the internal parameters of the DFIG change because of the effects of temperature and saturation, it is a major problem that affects the performance of the regulators. The proposed ADRC theory, which operates according to the ESO [82], does not require a precise model of the plant. The advantage of ADRC is to observe all internal and external disturbances of the system (such as cross-coupling terms, parameter uncertainties due to the temperature, and load variation), while it calculates and eliminates their adverse effects in real-time. Consider a second-order single-input single-output (SISO) plant as [83]:
The state equations of the plant are:
where u(t) and y(t) are the respective input and output of the plant, d(t) and f(.) are the respective external and total disturbances, and b0 is the known part of the plant.
The structure of the ADRC is shown in Fig. 5. As mentioned, the ADRC includes three main components: TD, NLSEF, and ESO.
-
(a)
second-order TD

The relations of this part are given by:
where v(t) is the reference input, v1(t) is the tracking amount of v(t), and v2(t) is the derivative of v1(t). R is a positive factor that needs to be tuned, and ψ(.) is a nonlinear function.
-
(b)
third-order ESO
The relations of the observer mentioned above are given as:
where u(t) is the plant input, βi (i = 1, 2, 3) are the observer gains, gi (i = 1, 2, 3) are the appropriate nonlinear functions, while z1(t) is the tracking amount of y(t). z2(t) is the derivative of z1(t) and z3(t) is the total disturbance estimation, while b0 has been previously defined. By appropriately selecting gi (i = 1, 2, 3) and regulating βi (i = 1, 2, 3), the states zi (i = 1, 2) and z3 estimate the states xi (i = 1, 2) and total disturbances, respectively.
-
(iii)
NLSEF
This block generates the control law of ADRC as:
where z(t) = (z1(t), z2(t)) and v(t) = (v1(t), v2(t)).
For fast and optimal control of a second-order SISO plant, the ADRC equations are given as:
where r determines the tracking speed (r > 0), sgn is the sign function, and kd and kp are the derivative and proportional factors, respectively. α1, δ1, α2, δ2, and δ are the parameters of ADRC that need to be determined. The expression of the fal(.) function is:
If α < 1, fal(.) delivers a large/small error with a small/large gain.
3.2 Modified ADRC
In this section, using the new fal functions, fractional-order functions, and fuzzy logic, a modified ADRC is introduced to improve the performance of the control circuit.
3.2.1 New fal functions
It is seen from (18) that the fal function has one input (e) and two parameters (α and δ), and has two different rules depending on the input value of e. The parameter δ is usually less than one. For the values of α = 0.5 and δ = 0.05, this function is plotted in Fig. 6. Since fal is an odd function, its continuity and derivability are examined only at the point e = δ and the result will be similar at the point e = −δ.

The fal function for α = 0.5 and δ = 0.05
It can be seen that the fal function is continuous at the point e = δ but is not derivable, which can lead to non-smooth output of the blocks in which this function is used. The continuity and non-derivability of the fal function at e = δ and e = −δ are shown in Fig. 6. The problem expressed in the fal function is to be solved by defining new forms of the fal function with fewer criteria to reduce the amount of computation. It is seen from (18) and Fig. 6 that the fal function is odd, so the new functions that will be defined must be odd too. Among the trigonometric and hyperbolic functions, the arcsinh, arctan, and tanh functions are similar to the diagram in Fig. 6 but do not have the problem of derivation. So they are selected as the candidates. The relation of fal function with arcsinh (falarcsinh) is:
From the value of the function at the origin and e = δ, there are:
From the above equations, there is:
Similarly, for fal functions with arctan (falarctan) and tanh (faltanh), there are:
In (17), the fal functions used in NLSEF and ESO can be any of the functions of the default fal, falarcsinh, falarctan or faltanh.
3.2.2 Fuzzy fractional-order ADRC (FFOADRC)
The structure of FFOADRC is presented in Fig. 7. As shown, a linear combination of v2 and z2 (E2 = k1v2−k2z2) has been used instead of the error derivative (e2 = v2−z2) to enhance the performance of ADRC, improve its controllability and increase its degree of freedom. Since fractional-order functions are more controllable than integer-order ones, NFESO and FTD are used. The fractional calculation is a generalization of integration and differentiation to non-integer order. The non-integer order fundamental operator is introduced as follows [84]:
where α is the order of the operation. In Fig. 7, if the commensurate order of the plant is equal to α, then the differential equation will be as follows:

Block diagram of the FFOADRC
Considering \(x_{1} = y\), \(x_{2} = y^{(\alpha )}\) and \(x_{3} = f(u,d,y,y^{(\alpha )} )\) so that \(x_{1}\) and \(x_{2}\) are the states of the system and \(x_{3}\) is the extended state, the state equations are obtained as:
where \(x = \left[ {\begin{array}{*{20}c} {x_{1} } \\ {x_{2} } \\ {x_{3} } \\ \end{array} } \right]\), \(x^{(\alpha )} = \left[ {\begin{array}{*{20}c} {x_{1}^{(\alpha )} } \\ {x_{2}^{(\alpha )} } \\ {x_{3}^{(\alpha )} } \\ \end{array} } \right]\), \(A = \left[ {\begin{array}{*{20}c} 0 & 1 & 0 \\ 0 & 0 & 1 \\ 0 & 0 & 0 \\ \end{array} } \right]\), \(B = \left[ {\begin{array}{*{20}c} 0 \\ {b_{0} } \\ 0 \\ \end{array} } \right]\), \(C = \left[ {\begin{array}{*{20}c} 1 & 0 & 0 \\ \end{array} } \right]\), \(E = \left[ {\begin{array}{*{20}c} 0 \\ 0 \\ 1 \\ \end{array} } \right]\), and \(h = f^{(\alpha )} ( \cdot )\).
To estimate \(x_{1}\), \(x_{2}\), and \(x_{3}\), a NFESO is considered as follows:
As previously expressed, β1, β2, and β3 are the observer gains. In (28), z1, z2, and z3 are the estimations of x1, x2, and x3, respectively. Meanwhile, the fal function can be any of the functions default fal, falarcsinh, falarctan or faltanh. Using numerical calculations and based on the Fibonacci sequence, the coefficients β1, β2, and β3 are obtained as [83]:
where h is the sampling period. By selecting the coefficients according to (29), the system states and total disturbances are estimated satisfactorily. If the NFESO coefficients are tuned correctly, then the extended state can be accurately tracked. By considering the control law of ADRC as \(u = \frac{{u_{0} - z_{3} }}{{b_{0} }}\), an integration system is available in the form of \(y^{(2\alpha )} \approx u_{0}\). In Fig. 7, the FTD relations are [54]:
where Г(.) is the Gamma function.
3.2.2.1 Adjustment of NLSEF block coefficients (kp and kd) in FFOADRC
In NLSEF, the proper selection of coefficients kp and kd is essential [85]. Increasing kp leads to a shorter transient time of responses and improves tracking accuracy, but higher overshoot which has adverse effects on dynamic performance. Increasing kd leads to faster process response, but high−frequency noise appears. So fuzzy logic is used to specify the suitable coefficients for NLSEF. The rules of the fuzzy system are presented in Table 2. The rules are defined to zero e1 and E2 such that "NB ≡ Negative Big", "NM ≡ Negative Medium", "NS ≡ Negative Small", "ZO ≡ Zero", "PS ≡ Positive Small", "PM ≡ Positive Medium", and "PB ≡ Positive Big". As mentioned, e1 is the error (e1 = v1 − z1) and E2 is the linear combination of the derivative of errors (E2 = k1v2 − k2z2).
4 DFIG vector control using modified ADRC
In this part, vector control of the RSC and GSC is conducted separately using PI controller and FFOADRC.
4.1 Control of the RSC and GSC using FFOADRC
Because of the importance of selecting NLSEF coefficients and appropriate control of NFESO and FTD, in this part, the RSC and GSC vector control is performed using FFOADRC. The default fal, falarcsinh, falarctan and faltanh functions are used separately.
4.1.1 Speed sensorless vector control of RSC
The RSC control block diagram is presented in Fig. 8 where the current and velocity control loops are implemented using FFOADRC.

Speed sensorless vector control of the RSC using the FFOADRC
4.1.1.1 Current control loops of RSC
From (6) to (7), the stator flux derivatives are:
where \(\sigma = 1 - \frac{{L_{m}^{2} }}{{L_{s} L_{r} }}\) is the leakage coefficient. Using (7), the rotor fluxes are:
From (31) and (32), the rotor flux derivatives are given as:
Substituting (33) in (7), the rotor current derivatives are obtained as:
From (7) and the definition of stator flux oriented (SFO) control, in which the d-axis of the reference frame is aligned to the stator flux vector, there are:
Given the SFO and neglecting the impact of stator resistance, stator voltages in the d−q coordinate are vds=0 and vqs=ωsλds. So (34) can be simplified as:
The derivatives of (36) are given as:
where ydr(t)=idr(t) and yqr(t)=iqr(t) are the observer inputs, and udr(t)=vdr(t) and uqr(t)=vqr(t) are the output signals used for controlling the RSC. f3dr and f3qr are the total disturbances with the following relations:
The overall structural diagram is presented in Fig. 8. Using third−order observers, there are z3dr=f3dr and z3qr=f3qr. From (38), there is:
As ωs−ωm=ωr, the estimated electrical speed of the rotor \((\hat{\omega }_{m} )\) is given in (40), where the rotor speed is estimated from the machine parameters. If for any reason (internal or external) the equilibrium point of the DFIG changes, FFOADRC considers these changes in real−time in the estimation of the disturbances (z3dr and z3qr). Then the speed estimator estimates the new speed of the rotor so that the DFIG control can be performed at the new equilibrium point by calculating the rotor angle. From Fig. 8, two FFOADRCs are used in the d−q coordinate. The FFOADRC outputs (vdr, vqr) should be converted into the d−q frame to be used in the PWM modulator to generate switching pulses. The angle required for this conversion (\(\hat{\theta }_{m}\)) is obtained from the output of the speed estimator, while the rotor currents are converted into the d-q frame to enter the FFOADRCs. Since the RSC control circuit operates with currents of the rotor transmitted to the stator side, conversion of currents/voltages to the rotor side should be conducted before producing the signals for the modulator. Therefore, the u factor is used and
specified as u = Ns/Nr, where Nr and Ns are the number of turns of the rotor and stator windings, respectively. Given that the controller design is similar for the d-axis and q-axis, this design is only expressed for the d-axis. Equations (28) and (29) are used to design the observer, and the control law of FFOADRC is given as:
where α is the fractional-order, \(v_{2dr} = v_{1dr}^{(\alpha )}\), and \(z_{2dr} = z_{1dr}^{(\alpha )}\). As stated in Sect. 3.2.2.1, kd and kp are specified using fuzzy logic. With a feed-forward compensator, the FFOADRC output is:
The extended state of the system (z3dr) is estimated by the observer. In the α-β coordinate, the stator fluxes are [86]:
where vαs, vβs, iαs, and iβs are the stator voltage/current components in the α-β coordinate. So the flux observer calculates the stator flux amplitude and stator voltage vector angle using:
According to the SFO and using (9) and (35), the stator reactive power is:
Therefore, the d component related to the reference current of the rotor is:
From [86] and using SFO, the electromagnetic torque is:
Therefore, the q component related to the reference current of the rotor is:
where p is the number of pole pairs.
4.1.1.2 Speed control loop of RSC
The mechanical equation of the DFIG is [81]:
where J is the inertia of the DFIG, Ωm is the mechanical speed of the shaft, Tr is the load torque, and f is the friction coefficient. From (49) there is:
The derivative of (50) is:
where urs(t) = Tem. f3r is the total disturbances estimated by the observer and its relation is:
4.1.2 GSC vector control
The schematic of the GSC vector control is presented in Fig. 9. From the actual and reference of the DC-link voltage \((V_{bus} , \, V_{bus}^{ref} ),\) the reference active power exchanged with the network \((P_{g}^{ref} )\) is specified using the PI controller. The current control loops are also implemented using FFOADRC.

Vector control of the GSC using the FFOADRC
4.1.2.1 Current control loops of GSC
The power (active and reactive) exchanged with the network are [86]:
Given an assumption of network voltage orientation and that this voltage is aligned along the d−axis, there are:
In Fig. 9, the filter currents (iag, ibg, icg) are converted into the α−β coordinate and are then converted into the d−q frame to be used in FFOADRCs. The network voltage angle (θg) is required for conversion between the d−q and α−β frames. This is obtained using a phase−locked loop (PLL). The network voltages in the d−q frame (vdg, vqg) were expressed in (11), so the derivatives of the filter currents are obtained as:
The derivatives of (55) are:
where udg(t)=vdf(t) and uqg(t)=vqf(t) are the control signals of FFOADRCs for controlling the GSC. f3dg and f3qg are the total disturbances estimated using NFESOs and their equations are given as:
Using the third order NFESOs, we have z3dg=f3dg and z3qg=f3qg.
4.2 RSC and GSC control using the PI controller
In this part, comparison of the PI controller and FFOADRCs, vector control of RSC and GSC is conducted using the PI controller.
4.2.1 Vector control of RSC with speed sensor
The RSC control circuit is presented in Fig. 10 where the current control loops are implemented using the PI controller. From (36), the rotor voltages in the d-q coordinate are:

Vector control of the RSC with speed sensor using the PI controller [87]
Figure 10 shows that the mentioned coupling terms are combined with the PI controller outputs to generate reference rotor voltages. The rotor electrical speed (ωm) is measured using an encoder. In Fig. 10, the transfer function related to the current control loops is [87]:
If (59) is written in the form of \(\frac{{\frac{{k_{pr} s + k_{ir} }}{{\sigma L_{r} }}}}{{s^{2} + 2\xi_{r} \omega_{nr} s + \omega_{nr}^{2} }}\) while considering \(\xi_{r} = 1\), then \(k_{pr} = 2\sigma L_{r} \omega_{nr} - R_{r}\) and \(k_{ir} = \sigma L_{r} \omega_{nr}^{2}\), where \(\xi_{r}\) is the damping coefficient and \(\omega_{nr}\) is the natural frequency of the mentioned loops. In this condition, both poles are placed at \(- \omega_{nr}\) and the control system is stable.
4.2.2 GSC control
The GSC control circuit is presented in Fig. 11. From (11) and under the condition of network voltage orientation, the output voltages of GSC are:

Vector control of the GSC using the PI controller [88]
As shown in Fig. 11, the mentioned coupling terms are combined with the PI controller outputs to generate reference voltages of the GSC output. Next, the voltages associated with the output of GSC are generated using sequential conversions, which are used in the PWM modulator to generate switching signals. In Fig. 11, the transfer function related to the current control loops is [88]:
By equating (61) in the form of \(\frac{{\frac{{k_{pg} s + k_{ig} }}{{L_{f} }}}}{{s^{2} + 2\xi_{g} \omega_{ng} s + \omega_{ng}^{2} }}\) and considering \(\xi_{g} = 1\), \(k_{pg} = 2L_{f} \omega_{ng} - R_{f}\) and \(k_{ig} = L_{f} \omega_{ng}^{2}\), where \(\xi_{g}\) is the damping coefficient and \(\omega_{ng}\) is the natural frequency of the mentioned loops. In this condition, both poles are placed at \(- \omega_{ng}\) and the control system is stable.
5 Simulation analysis
In this section, the effect of using different fal functions in conventional ADRC is examined first. Then the DFIG-based wind turbine is simulated in MATLAB/Simulink, in which the RSC and GSC are controlled separately using a PI controller, conventional ADRC, and FFOADRCs with different fal functions (default fal, falarcsinh, falarctan, and faltanh). The performance of these controllers during disturbances such as voltage sag and voltage swell is examined and compared. The parameters of the simulated system are presented in Table 3.
5.1 The effect of different fal functions
For α = 0.5 and δ = 0.05, the mentioned fal functions are plotted in Fig. 12. It can be seen that the functions falarcsinh, falarctan, and faltanh are very close to each other at the origin. Therefore, in the steady state where the error (e) tends to zero, the three functions will have the same results, while the differences in their performance are in transient states and under disturbance conditions. Since the values of the functions falarcsinh, falarctan, and faltanh increase (or decrease) with a larger slope than the default fal function near the origin, it is expected that these three functions perform better than the default fal function.

Curves of the default fal (red), falarcsinh (black), falarctan (blue), and faltanh (pink)
To compare the behavior of a conventional ADRC using different fal functions, a 2nd order system is considered, whose transfer function is \(\frac{10}{{s^{2} + 3s + 1}}\). The ADRC is implemented according to (17). The input applied to the system is a square wave, with amplitude of one and frequency of 1 Hz. A strong positive disturbance, a strong negative disturbance, and a weak positive disturbance are applied to the system at 0.75 s, 1.25 s, and 1.55 s, respectively. These disturbances are in the form of step functions, and the simulation results are presented in Fig. 13.

Input square wave (black) and the outputs of the system based on the different fal functions (default fal: blue, falarcsinh: red, falarctan: green, and faltanh: purple)
It can be seen from Fig. 13 that at 0.75 s and 1.25 s, the overshoot and undershoot values are around 72% when using the default fal, but with falarcsinh, falarctan, and faltanh, they are almost 0%, indicating that the system is very robust to step disturbance. Similarly, at 1.55 s when a weak step disturbance is applied to the system, the overshoot rate is about 0.5% for the default fal, while the rate is 0% using falarcsinh, falarctan, and faltanh. At 0.5 s, if the default fal and falarcsinh are used, the system reaches the steady-state as critical damping, with the overshoot rates of 5% and 0.5%, respectively. This value becomes almost zero when falarctan and faltanh are used (critical damping), so the settling time in these two cases is less than the others. The simulation results are similar at 1 s and 1.5 s. The summary of the results with different fal functions in conventional ADRC is presented in Table 4.
5.2 Voltage sag/swell
During an abrupt voltage sag, the stator flux reaches its final steady state more slowly than the stator voltage. Since the phases of rotor current and stator flux are opposite to each other, this leads to a faster reduction of flux. During an abrupt decrease of stator voltage, this variation should be accompanied by an abrupt change in rotor voltage to prevent a sharp increment in rotor current. Because of the slow decrease of stator flux, the rotor voltage becomes greater than its value in the steady-state. Thus, the range of rotor voltage should be higher, especially at the start of the voltage sag, so that rotor current control is not lost and this current is kept within an allowable range. Because the back-to-back converters are not able to handle the high rotor voltage, the circuit thus becomes uncontrollable. To solve this problem, the crowbar is used here. The behavior of the DFIG during voltage sag is investigated using a crowbar in [89]. Here a circuit breaker involving a diode, a resistance, and a switch is used. When this protection is activated, the resistance is located in the terminals of the rotor.
Voltage swell is an anomaly in the grid and usually occurs when the reactive power exceeds the requirements of a power system. Overvoltage due to the sudden removal of large loads, asymmetric faults in the network, and the entry of a capacitive bank into the grid can damage the power electronic converters used in a DFIG. At the moment of overvoltage, a large electromagnetic force due to the transient leakage flux of the stator is induced in the DFIG rotor. As a result, it will create an overcurrent in the rotor. It is noted that after increasing the network voltage, the voltages of the stator and rotor increase, and their currents decrease. Also, the electromagnetic torque increases with decreasing rotor velocity. As expected, stator and rotor fluxes increase when the overvoltage occurs. According to the Australian network codes [21], a DFIG should withstand up to 1.3 times the nominal voltage without losing synchronism.
In this paper, using the mentioned controllers, the effects of symmetrical and asymmetrical voltage sag/swell on the DFIG are investigated separately.
5.2.1 Implementation of symmetrical voltage sag
In this section, symmetrical voltage sag is implemented according to the Spanish network code [21]. The voltage sag happens at 7 s, and the voltage reaches 20% of its initial amount. Within 7.5 to 8 s, the network voltage ramps up and reaches 80% of its initial value (Fig. 14). During the simulation, the wind speed is assumed to be constant at 8.5 m/s. The protection is enabled in the time range of 7 s to 7.1 s, and during this time, the RSC is out of the circuit so as not to be damaged. As soon as the protection is enabled, the flux of the stator is reduced by the resistance. To investigate the effect of the crowbar resistance on system performance, a detailed study has been performed [89], which shows that the resistance value affects the peak of the electromagnetic torque and the fault current passing through it.

Network voltage during symmetrical voltage sag (Spanish network code)
In the RSC controller circuit, \(i_{dr}^{ref}\) goes from zero to its nominal value at 7.15 s. Thus according to (45), Qs is the negative and reactive power injected into the network through the stator. Since the total network requirements are met by \(i_{dr}^{ref}\) in the period between 7.15 and 8 s, \(i_{qr}^{ref}\) must be zero during this period. Therefore, according to (47), Tem will also be zero during this period, while at other times, torque is controlled by the MPPT algorithm. When the crowbar is activated (7 s to 7.1 s), all the machine's energy is lost in the crowbar resistance and the GSC, and remains in the circuit to keep the DC-link voltage constant. So in the time interval between 7.15 s and 8 s, \(i_{qr}^{ref}\) is zero but at other times this current is controlled by the MPPT algorithm. Meanwhile, \(i_{dr}^{ref}\) changes from the nominal value to zero at 8 s.
After the network voltage returns to the steady-state (t > 8 s), the stator flux also retrieves the nominal value so that magnetization is carried out correctly once more and the DFIG operates normally. The stator fluxes during symmetrical voltage sag for Rcrowbar = 0.01 Ω using different controllers are shown in Fig. 15. It can be seen that during voltage sag and using the PI controller (Fig. 15a), the fluctuation amplitude of stator flux is significant, and even after the voltage returns to the new value (t > 8 s), the amplitude is still high so that the flux reaches the steady-state value over a long period. The comparison of Fig. 15b and c shows the superiority of FFOADRC over conventional ADRC. Also, the use of FFOADRCs with trigonometric and hyperbolic functions (Fig. 15d–f) leads to the lowest fluctuation of stator flux during voltage sag (7 s < t < 8 s) and after return to steady-state (t > 8 s). The d and q components of the stator flux are presented in Fig. 16. It is seen that during the voltage sag and its recovery time (7 s < t < 8 s), using the PI controller (Fig. 16a), the flux has the highest fluctuations. The use of conventional ADRC reduces the fluctuations slightly (Fig. 16b), while Fig. 16c clearly shows the superiority of FFOADRC over conventional ADRC in reducing the fluctuations. In addition, using trigonometric and hyperbolic functions in FFOADRC results in the smallest fluctuations (Fig. 16d–f).


The stator fluxes during the symmetrical voltage sag for Rcrowbar = 0.8 Ω are presented in Figs. 17 and 18. It is seen that with the increase of the crowbar resistance, the performance of the PI controller, conventional ADRC, and FFOADRC with default fal function (Figs. 17a–c, 18a–c) become worse. In this situation, the performances of FFOADRC with trigonometric and hyperbolic functions (Figs. 17d–f, 18d–f) do not change much, which also indicates their superiority. From Figs. 15, 16, 17 and 18, it can be seen that by choosing the appropriate resistance of the crowbar circuit [89] and using the FFOADRC with trigonometric and hyperbolic functions, it is possible to reduce the fluctuations and peak values of the DFIG parameters such as flux, torque, current, etc.


The DFIG speeds using different controllers are shown in Fig. 19a. It is seen that the decrease in network voltage leads to an almost linear increase in speed. This is because, during the voltage sag, the energy transmitted to the grid is reduced, while the energy captured by the turbine remains constant, leading to an increase in turbine speed. After fault clearance and voltage recovery, the rotor speed returns to the new value and all the parameters, such as speed, are controlled by the MPPT algorithm.

a DFIG speed during symmetrical voltage sag; b zoom of a
It is seen from Fig. 19b that at full voltage recovery (t = 8 s), using the PI controller and conventional ADRC with default fal, the DFIG velocity starts to decrease abruptly. This sudden change in the velocity, accompanied by a sudden change in DFIG acceleration, can cause damage to the shaft and other related equipment (acceleration is positive and negative at t < 8 s and t > 8 s, respectively). In contrast, using FFOADRCs with different fal functions, the velocity changes smoothly and there is no problem with the stress on the DFIG. Also, after full voltage recovery, using different kinds of ADRC compared to the PI controller, the DFIG speed reaches a stable value faster. Figure 19b shows that during the voltage sag, with the simultaneous use of FFOADRC and trigonometric and hyperbolic functions, the velocity variations are lower.
The voltages of the DC-link at the time of the voltage sag using different controllers are represented in Fig. 20. It can be seen that when the voltage sag appears and disappears (t = 7 s and t = 8 s), the DC-link voltages change suddenly, and during the fault (7 s to 8 s), the DC voltages fluctuate around the reference value. The range of these variations is within a narrow band, and is due to extra energy fed into the converters (energy imbalance between inputs and outputs of the converters) and the rapid response of the regulators that control the GSC. In the period of voltage sag (7 s < t < 8 s) and using the PI controller (Fig. 20a), the DC voltage has high-frequency oscillations. However, using conventional ADRC and different FFOADRCs (Figs. 20b–f), there are no high-frequency oscillations which show their superiority over the PI controller. Also, before and after the voltage sag (t < 7 s and t > 8 s), using falarctan (Fig. 20e) results in the lowest range of voltage fluctuations.

The rotor and stator currents are shown in Figs. 21 and 22, respectively. As shown, the falarcsinh function is selected as the candidate to check the effect of the crowbar resistance variations, with the values of 0.01 Ω, 0.2 Ω, 0.4 Ω, and 0.6 Ω being considered. As expected, at the moment of fault occurrence (t = 7 s), the peak values of the rotor and stator currents decrease with the increase of crowbar resistance. In addition, it is seen that after the removal of the crowbar resistance from the circuit and during the times of voltage sag and its recovery (7.1 s < t < 8 s), FFOADRC with the falarcsinh function properly controls the rotor and stator currents with no significant distortion. Using the falarctan and faltanh functions in the FFOADRC also provide similar results. Therefore, using trigonometric and hyperbolic functions in FFOADRC and changing the value of the crowbar resistance [89], the peak values of the rotor and stator currents are controllable at the moment of fault occurrence.

Rotor current of the DFIG during symmetrical voltage sag for different values of Rcrowbar. (a) Rcrowbar = 0.01 ohm, (b) Rcrowbar = 0.2 ohm, (c) Rcrowbar = 0.4 ohm, and (d) Rcrowbar = 0.6 ohm

Stator current of the DFIG during symmetrical voltage sag for different values of Rcrowbar. (a) Rcrowbar = 0.01 ohm, (b) Rcrowbar = 0.2 ohm, (c) Rcrowbar = 0.4 ohm, and (d) Rcrowbar = 0.6 ohm
The rotor voltage during voltage sag and its recovery is presented in Fig. 23. As previously stated in Sect. 5.2, during a sudden decrease in the stator voltage, the rotor voltage must also change quickly to avoid a sharp increase in the rotor current. In this condition, because of the slow reduction of the stator flux, the rotor voltage becomes larger than its steady-state value. The electromagnetic torque during the fault is shown in Fig. 24. According to (47), and because iqr is zero, the torque is zero, while at other times, it is controlled by the MPPT algorithm.

Rotor voltage of the DFIG during symmetrical voltage sag

Electromagnetic torque of the DFIG during symmetrical voltage sag
5.2.2 Implementation of the symmetrical voltage swell
In this section, the symmetrical voltage swell is implemented according to the Australian network code [21]. The voltage swell happens at 7 s, and the voltage reaches 130% of its initial value. In the period from 7.5 to 8.44 s, the network voltage ramps down (Fig. 25). During the simulation, the wind speed is assumed to be constant at 8.5 m/s. After the network voltage returns to 110% of its initial value (t > 8.44 s), the stator flux also retrieves the new value so that the DFIG operates normally.

Network voltage during symmetrical voltage swell (Australian network code)
The stator fluxes during voltage swell using the PI controller and different ADRCs are shown in Fig. 26. It can be seen that by using the PI controller (Fig. 26a), the amplitude of fluctuations is more significant. After the voltage returns to the new value, large fluctuations still exist and the flux takes a long time to reach the steady-state. Comparing Fig. 26a and b, it shows that the use of conventional ADRC reduces the amplitude of fluctuations during the voltage swell (7 s < t < 7.5 s) and recovery time (7.5 s < t < 8.44 s). According to Fig. 26b and c, using fractional-order functions and fuzzy logic, reduces the amplitude of fluctuations at recovery time. Using trigonometric and hyperbolic functions in FFOADRC (Fig. 26d–f) improves the controller performance so that the amplitude of fluctuations is significantly reduced throughout the simulation time. The d and q components of the stator flux are presented in Fig. 27. It is seen that during the voltage swell and its recovery time (7 s < t < 8.44 s), with the PI controller (Fig. 27a), the flux has the highest fluctuations. Using conventional ADRC reduces these fluctuations slightly (Fig. 27b), while the superiority of FFOADRC over conventional ADRC in reducing the range of fluctuations is evident from Fig. 27b, c. In addition, using trigonometric and hyperbolic functions in FFOADRC results in the smallest fluctuations (Fig. 27d–f).


The rotor and stator currents, and electromagnetic torque are shown in Figs. 28, 29, and 30, respectively. The falarcsinh function is selected as the candidate to check the effect of the crowbar resistance variations on system performance, with the values of 0.01 Ω, 0.2 Ω, 0.4 Ω, and 0.6 Ω being considered. From Figs. 28, 29, and 30, it is seen that when crowbar protection is activated (t = 7 s), the peak values of the waveforms decrease with the increase of the crowbar resistance. After deactivating crowbar protection and during the fault (7.1 s < t < 8.44 s), using FFOADRC with the falarcsinh function properly controls the electromagnetic torque and the currents with no significant distortion. Using the falarctan and faltanh functions in FFOADRC provides similar results. Therefore, using trigonometric and hyperbolic functions in FFOADRC, and changing the value of the crowbar resistance [89], the peak values of the waveforms are controllable at the moment of fault occurrence.

Rotor current of the DFIG during symmetrical voltage swell for different values of Rcrowbar . (a) Rcrowbar = 0.01 ohm, (b) Rcrowbar = 0.2 ohm, (c) Rcrowbar = 0.4 ohm, and (d) Rcrowbar = 0.6 ohm

Stator current of the DFIG during symmetrical voltage swell for different values of Rcrowbar. (a) Rcrowbar = 0.01 ohm, (b) Rcrowbar = 0.2 ohm, (c) Rcrowbar = 0.4 ohm, and (d) Rcrowbar = 0.6 ohm

Electromagnetic torque of the DFIG during symmetrical voltage swell for different values of Rcrowbar. (a) Rcrowbar = 0.01 ohm, (b) Rcrowbar = 0.2 ohm, (c) Rcrowbar = 0.4 ohm, and (d) Rcrowbar = 0.6 ohm
The harmonic spectra of the stator current using the PI controller and different kinds of ADRC are presented in Fig. 31. The harmonic contents are considered for ten cycles with a starting time of 11 s. The THDs of the stator currents are shown in Table 5. It is seen that the PI controller leads to the highest THD (Fig. 31a), conventional ADRC (Fig. 31b) reduces the THD, while simultaneous use of fractional-order functions and fuzzy logic (Fig. 31c) also reduces the THD, which demonstrates the superiority of FFOADRC over conventional ADRC. In addition, the trigonometric and hyperbolic functions in FFOADRC (Fig. 31d–f) result in the lowest THD.

5.2.3 Implementation of the asymmetrical voltage sag
Asymmetrical voltage sag can be caused by single-phase-to-ground fault, phase-to-phase-to-ground fault, and phase-to-phase fault. In this section, it is assumed that a phase-to-phase fault occurs. The voltage applied to the DFIG through the stator and GSC is in accordance with Fig. 32, where the voltage of phase a is normal while in phases b and c, both amplitudes are reduced and there are phase shifts compared to the normal state. The asymmetrical voltage sag starts at 7 s and ends at 7.5 s. In this situation, to work with positive and negative sequences of voltage and current, current control loops related to the mentioned sequences are used. The simulation results are shown in Figs. 33, 34 and 35. In these conditions, because of voltage asymmetry and stator flux fluctuation, the torque, rotor current, and stator current fluctuate. To investigate the effect of using trigonometric and hyperbolic functions in FFOADRC, the falarcsinh function is selected to check the impact of crowbar resistance variations on the waveforms throughout the fault time, with the values of 0.01 Ω, 0.2 Ω, 0.4 Ω, and 0.6 Ω being considered. The crowbar resistance enters the circuit at 7 s to protect the RSC, and is removed from the circuit at 7.1 s. From Figs. 33, 34 and 35, it is seen that at the moment of fault occurrence (t = 7 s), the peak values of the electromagnetic torque, rotor current, and stator current decrease with the increase of crowbar resistance. After removing the crowbar resistance from the circuit and during the voltage sag (7.1 s < t < 7.5 s), FFOADRC with the falarsinh function properly controls the torque and currents with no significant distortion. Therefore, the performance of the control circuit is improved throughout the fault time. Using the falarctan and faltanh functions in the FFOADRC provides similar results.

Unbalance caused by phase-to-phase fault; a three-phase voltages and b phasor diagram

Rotor current of the DFIG during asymmetrical voltage sag for different values of Rcrowbar. (a) Rcrowbar = 0.01 ohm, (b) Rcrowbar = 0.2 ohm, (c) Rcrowbar = 0.4 ohm, and (d) Rcrowbar = 0.6 ohm

Stator current of the DFIG during asymmetrical voltage sag for different values of Rcrowbar. (a) Rcrowbar = 0.01 ohm, (b) Rcrowbar = 0.2 ohm, (c) Rcrowbar = 0.4 ohm, and (d) Rcrowbar = 0.6 ohm

Electromagnetic torque of the DFIG during asymmetrical voltage sag for different values of Rcrowbar. (a) Rcrowbar = 0.01 ohm, (b) Rcrowbar = 0.2 ohm, (c) Rcrowbar = 0.4 ohm, and (d) Rcrowbar = 0.6 ohm
6 Stability analysis
As shown in Fig. 8, the structures of the d-axis and q-axis current controllers are the same. Hence only the stability of the d-axis controller is expressed. There are many parameters of ADRC that need to be regulated. Therefore linear ADRC is suggested since it offers better performance than nonlinear ADRC [90]. As previously mentioned, if FFOADRC is used to control a 2nd order linear fractional plant, \(y^{(2\alpha )} \approx u_{0}\). So from (41), there is:
Using the Laplace transform, the transfer function for the RSC control circuit while using FFOADRC is as follows, and the corresponding equivalent circuit is presented in Fig. 36.

Equivalent circuit of the RSC control circuit using FFOADRC
In (63), if kp and kd are respectively selected as \(\omega_{c}^{2}\) and 2ωc (ωc is the controller bandwidth), then the denominator roots of the transfer function for all positive k2d are placed in the left half plane. So the plant will be stable. In order to analyze the stability, the effect of coefficients ωc, α, k1d and k2d are considered separately. For this, step response and the concepts of phase margin (PM) and gain margin (GM) are used. For the system shown in Fig. 36, PM and GM are given in (64) and (65), respectively.
6.1 The role of the k 1d and k 2d in sustainability
In conventional ADRC, k1d = k2d = 1. In this part, by choosing k2d = 1, α = 0.7, ωc = 10, and for different k1d, the system's step response and its evaluation parameters are presented in Fig. 37 and Table 6, respectively. It can be seen that for k1d > 1, the overshoot and settling time increase, which is not desirable, though the rise time is reduced, which is favorable. In addition, the GM is negative which indicates an instability in the system, while the PM is reduced.

Step response of the RSC control circuit using FFOADRC (for k2d = 1, α = 0.7, ωc = 10, and different k1d)
As k1d < 1, the settling and rise times increasing indicates that the system is being slowed down, which is undesirable. In this case, increasing the PM indicates that the system becomes more stable.
Similarly, by choosing k1d = 1, α = 0.7, ωc = 10, and for different k2d, the step responses are drawn in Fig. 38, and the results are shown in Table 7. It is seen that if k2d < 1, the negative GM will lead to system instability. In addition, increasing k2d to a value of more than one (k2d > 1) leads to an increase in the PM, making the system more stable. This increase slows down the system and the system does not enter the unstable zone (If PM is greater than 180 degrees, then the system will be unstable).

Step response of the RSC control circuit using FFOADRC (for k1d = 1, α = 0.7, ωc = 10, and different k2d)
With the given explanations, it is seen that if k2d > k1d, then the closed-loop system of the DFIG rotor with FFOADRC is always stable. Otherwise, the mentioned system becomes unstable and needs another controller to return to stable conditions.
6.2 The role of the α in sustainability
In this part, by choosing k2d = 1.1, ωc = 10, k1d = 1, and for different α, the step responses are drawn in Fig. 39, and the results are presented in Table 8.

Step response of the RSC control circuit using FFOADRC (for k2d = 1.1, ωc = 10, k1d = 1, and different α)
As α > 1, the transient time of the process ends later. Therefore, the tracking accuracy is reduced, and at the same time, the overshoot is increased. This has an adverse effect on dynamic performance. In this case, the PM is reduced which also has an adverse impact on system stability. For α = 1.8, the system becomes one of sinusoidal damping, and PM is less than 30 degrees which is not desirable (the suitable PM for stability is over 30 degrees).
As α < 1, the system becomes over damped, and the response speed increases. This improves the dynamic performance, but high-frequency noise may be amplified. In addition, the PM is increased. Therefore, the system becomes more stable. The reduction of α should be such that the PM does not enter the unstable zone (PM > 180 degrees).
6.3 The role of the ω c in sustainability
In this part, by choosing k2d=1.1, k1d=1, α=0.9, and for different ωc, the step responses are presented in Fig. 40. It can be seen that increasing ωc reduces the settling and rise times. This improves the dynamic performance but high−frequency noise may be problematic. Therefore, the proper selection of kp and kd is an essential factor in maintaining system stability. These coefficients were determined by fuzzy logic.

Step response of the RSC control circuit using FFOADRC (for k2d = 1.1, k1d = 1, α = 0.9, and different ωc)
7 Conclusions
A DFIG is sensitive to disturbances such as network voltage sag/swell. To overcome this and improve FRT capability, various control techniques are presented, and their advantages and disadvantages are reviewed in this paper. The results show that conventional ADRC is robust against disturbances in operational conditions and improves the efficiency of WECS.
A modified ADRC is introduced in this paper to enhance the FRT capability of a DFIG-based wind turbine. With this new ADRC, to achieve continuity and the derivability of the new fal function at all points, arcsinh, arctan, and tanh functions are considered as candidates. These functions are similar to the default fal function and all are odd functions (odd trigonometric and hyperbolic functions). Fractional-order functions and fuzzy logic are used to achieve better results and increase controllability. DFIG vector control is performed separately using a PI controller, conventional ADRC, and modified ADRC. From the simulations in the case of simultaneous use of fractional-order functions, fuzzy logic, trigonometric and hyperbolic functions in ADRC, the following results are obtained in comparison with the PI controller and conventional ADRC: (1) smaller fluctuations in stator flux amplitude during voltage sag/swell and recovery time; (2) reduced variations in velocity and DC-link voltage during voltage sag; and (3) lower THD of stator current during voltage swell. Therefore, the superiority of the modified ADRC over PI controller and conventional ADRC is confirmed.
For the future, we intend to examine: (1) Other protection circuits such as ESS, SDBR, SGSC, crowbar with series R-L, crowbar with SBR. Also a crowbar with DC-link chopper will be used with the modified ADRC to investigate the improvement of FRT capability. (2) The modified ADRC will be used to control a DFIG during other disturbances such as frequency deviations and different types of phase voltage imbalances. Simulation and laboratory results will be analyzed and compared with other controllers such as predictive control, sliding mode control, and backstepping control.
Availability of data and materials
All the data is given in the paper or properly cited wherever necessary.
Abbreviations
- FRT:
-
Fault ride-through
- DFIG:
-
Doubly-fed induction generator
- ADRC:
-
Auto disturbance rejection control;
- FFOADRC:
-
Fuzzy fractional-order ADRC
- NFESO:
-
Nonlinear fractional-order extended state observer
- THD:
-
Total harmonic distortion
- PI:
-
Proportional-integral
- RSC:
-
Rotor side converter
- GSC:
-
Grid side converter
- VSWT:
-
Variable speed wind turbine
- SBR:
-
Series braking resistor
- ESS:
-
Energy storage system
- SDBR:
-
Series dynamic braking resistor
- SGSC:
-
Series grid side converter
- FCL:
-
Fault current limiter
- SFCL:
-
Superconducting fault current limiter
- SVC:
-
Static VAR compensator
- STATCOM:
-
Static synchronous compensator
- DVR:
-
Dynamic voltage restorer
- MERS:
-
Magnetic energy recovery switch
- UPQC:
-
Unified power quality conditioner
- UPFC:
-
Unified power flow conditioner
- TCCFFC:
-
Transient current controller by feed-forward compensator
- SMC:
-
Sliding mode control
- FLC:
-
Fuzzy logic control
- MPC:
-
Model predictive control
- ESO:
-
Extended state observer
- SISO:
-
Single-input single-output
- TD:
-
Tracking differentiator
- NLSEF:
-
Nonlinear state error feedback
- FTD:
-
Fractional-order TD
- SFO:
-
Stator flux oriented
- PLL:
-
Phase locked loop
- PM:
-
Phase margin
- GM:
-
Gain margin
References
Yuan, Z., Wang, W., & Fan, X. (2019). Back propagation neural network clustering architecture for stability enhancement and harmonic suppression in wind turbines for smart cities. Computers & Electrical Engineering, 74(4), 105–116. https://doi.org/10.1016/j.compeleceng.2019.01.006
GWEC, Global Wind Report 2022. (2022). https://gwec.net/wp-content/uploads/2022/03/GWEC-GLOBAL-WIND-REPORT-2022.pdf.
Pena, R., Clare, J. C., & Asher, G. M. (1996). Doubly fed induction generator using back-to-back PWM converter and its application to variable-speed wind energy generation. IEE Proceedings Electric Power Applications, 143(3), 231–241. https://doi.org/10.1049/ip-epa:19960288
Ngamroo, I. (2017). Review of DFIG wind turbine impact on power system dynamic performances. IEE J Transactions on Electrical and Electronic Engineering, 12(3), 301–311. https://doi.org/10.1002/tee.22379
Boroujeni, H. Z., Othman, M. F., Shirdel, A. H., Rahmani, R., Movahedi, P., & Toosi, E. S. (2015). Improving waveform quality in direct power control of DFIG using fuzzy controller. Neural Computing and Applications, 26, 949–955. https://doi.org/10.1007/s00521-014-1725-7
Okedu, K. E., & Barghash, H. F. A. (2021). Enhancing the performance of DFIG wind turbines considering excitation parameters of the insulated gate bipolar transistors and a new PLL scheme. Frontiers in Energy Research, 8(620277), 1–11. https://doi.org/10.3389/fenrg.2020.620277
Kelkoul, B., & Boumediene, A. (2020). Stability analysis and study between classical sliding mode control (SMC) and super twisting algorithm (STA) for Doubly fed induction generator (DFIG) under wind turbine. Energy Elsevier, 214(11), 1–30. https://doi.org/10.1016/j.energy.2020.118871
Sheikhan, M., Shahnazi, R., & Nooshad Yousefi, A. (2013). An optimal fuzzy PI controller to capture the maximum power for variable-speed wind turbines. Neural Computing and Applications, 23(5), 1359–1368. https://doi.org/10.1007/s00521-012-1081-4
Boldea, I. (2006). Variable speed generator. Taylor & Francis. https://doi.org/10.1201/b19293
Anaya-Lara, O., Jenkins, N., Ekanayake, J., Cartwright, P., & Hughes, M. (2011). Wind energy generation: modeling and control. John Wiley & Sons.
Gayen, P. K., Chatterjee, D., & Goswami, S. K. (2015). Stator side active and reactive power control with improved rotor position and speed estimator of a grid connected DFIG (doubly-fed induction generator). Energy Elsevier, 89, 461–472. https://doi.org/10.1016/j.energy.2015.05.111
Qiao, W., Zhou, W., Aller, J. M., & Harley, R. G. (2008). Wind speed estimation based sensorless output maximization control for a wind turbine driving a DFIG. IEEE Transactions on Power Electronics, 23(3), 1156–1169. https://doi.org/10.1109/TPEL.2008.921185
Pan, C. T., & Juan, Y. L. (2010). A novel sensorless MPPT controller for a high-efficiency microscale wind power generation system. IEEE Transactions on Energy Conversion, 25(1), 207–216. https://doi.org/10.1109/TEC.2009.2032604
Thresher, R. W., & Dodge, D. M. (1998). Trends in the evolution of wind turbine generator configurations and systems. Wind Energy, 1, 70–85. https://doi.org/10.1002/(SICI)1099-1824(199804)1:1+%3c70::AID-WE2%3e3.0.CO;2-9
Datta, R., & Ranganthan, V. T. (2002). Variable speed wind power generation using doubly fed wound rotor induction machine: A comparison with alternative schemes. IEEE Transactions on Energy Conversion, 17(3), 414–421. https://doi.org/10.1109/TEC.2002.801993
Badreldien, M., Usama, R., El-Wakeel, A., & Abdelaziz, A.Y. (2014). Modeling, analysis and control of doubly fed induction generators for wind turbines. In 9th international conference on electrical engineering (pp. 1–17), Cairo, Egypt. https://doi.org/10.21608/iceeng.2014.30383
Leonhard, W. (2001). Control of electrical drives. Springer. https://doi.org/10.1007/978-3-642-56649-3
Akagi, H., & Sato, H. (2002). Control and performance of a doubly-fed induction machine intended for a flywheel energy storage system. IEEE Transactions on Power Electronics, 17(1), 109–116. https://doi.org/10.1109/63.988676
Muller, S., Deicke, M., & De Doncker, R. W. (2002). Doubly fed induction generator systems for wind turbines. IEEE Industry Applications Magazine, 8(3), 26–33. https://doi.org/10.1109/2943.999610
Naderi, S. B., Negnevitsky, M., & Muttaqi, K. M. (2019). A Modified DC chopper for limiting the fault current and controlling the DC-Link voltage to enhance fault ride-through capability of doubly-fed induction-generator-based wind turbine. IEEE Transactions on Industry Applications, 55(2), 2021–2032. https://doi.org/10.1109/TIA.2018.2877400
Darvish Falehi, A., & Rafiee, M. (2017). Fault ride-through capability enhancement of DFIG-based wind turbine using novel dynamic voltage restorer based on two switches boost converter coupled with quinary multi-level inverter. Energy Systems Springer, 9(4), 1071–1094. https://doi.org/10.1007/s12667-017-0249-5
Vidal, J., Abad, G., Arza, J., & Aurtenechea, S. (2013). Single-phase DC crowbar topologies for low voltage ride through fulfillment of high-power doubly fed induction generator-based wind turbines. IEEE Transactions on Energy Conversion, 28(3), 768–781. https://doi.org/10.1109/TEC.2013.2273227
Justo, J. J., & Bansal, R. C. (2018). Parallel R-L configuration crowbar with series R-L circuit protection for LVRT strategy of DFIG under transient-state. Electric Power Systems Research, 154, 299–310. https://doi.org/10.1016/j.epsr.2017.09.002
Yang, J., Fletcher, J. E., & O’Reilly, J. E. (2010). A Series-dynamic-resistor-based converter protection scheme for doubly-fed induction generator during various fault conditions. IEEE Transactions on Energy Conversion, 25(2), 422–432. https://doi.org/10.1109/TEC.2009.2037970
Tohidi, S., & Mohammadi-ivatloo, B. (2016). A comprehensive review of low voltage ride through of doubly fed induction wind generators. Renewable and Sustainable Energy Reviews, 57, 412–419. https://doi.org/10.1016/j.rser.2015.12.155
Shen, Y., Ke, D., Sun, Y., Kirschen, D. S., Qiao, W., & Deng, X. (2016). Advanced auxiliary control of an energy storage device for transient voltage support of a doubly fed induction generator. IEEE Transactions on Sustainable Energy, 7(1), 63–76. https://doi.org/10.1109/TSTE.2015.2472299
Huang, P. H., El-Mousri, M. S., Xiao, W., & Kirtley, J. L., Jr. (2013). Novel fault ride-through configuration and transient management scheme for doubly fed induction generator. IEEE Transactions on Energy Conversion, 28(1), 86–94. https://doi.org/10.1109/TEC.2012.2222886
El-Mousri, M. S. (2011). Fault ride through capability enhancement for self-excited induction generator-based wind parks by installing fault current limiters. IET Renewable Power Generation, 5(4), 269–280. https://doi.org/10.1049/iet-rpg.2010.0123
Zhao, C., Wang, Z., Zhang, D., Zhang, J., Du, X., Guo, W., Xiao, L., & Lin, L. (2007). Development and test of a superconducting fault current limiter-magnetic energy storage (SFCL-MES) system. IEEE Transactions on Applied Superconductivity, 17(2), 2014–2017. https://doi.org/10.1109/TASC.2007.899825
Molinas, M., Suul, J. A., & Undeland, T. (2008). Low voltage ride through of wind farms with cage generators: STATCOM versus SVC. IEEE Transactions on Power Electronics, 23(3), 1104–1117. https://doi.org/10.1109/TPEL.2008.921169
Qiao, W., Venayagamoorthy, G. K., & Harley, R. G. (2009). Real-time implementation of a STATCOM on a wind farm equipped with doubly fed induction generators. IEEE Transactions on Industry Applications, 45(1), 98–107. https://doi.org/10.1109/TIA.2008.2009377
Rauf, A. M., & Khadkikar, V. (2015). An enhanced voltage Sag compensation scheme for dynamic voltage restorer. IEEE Transactions on Industrial Electronics, 62(5), 2683–2692. https://doi.org/10.1109/TIE.2014.2362096
Wiik, J. A., Wijaya, F. D., & Shimada, R. (2009). Characteristics of the magnetic energy recovery switch (MERS) as a series facts controller. IEEE Transactions on Power Delivery, 24(2), 828–836. https://doi.org/10.1109/TPWRD.2008.2005879
Jayanti, N. G., Basu, M., Conlon, M. F., & Gaughan, K. (2009). Rating requirements of the unified power quality conditioner to integrate the fixed-speed induction generator-type wind generation to the grid. IET Renewable Power Generation, 3(2), 133–143. https://doi.org/10.1049/iet-rpg:20080009
Guo, W., Xiao, L., & Dai, S. (2013). Control and design of a current source united power quality conditioner with fault current limiting ability. IET Power Electronics, 6(2), 297–308. https://doi.org/10.1049/iet-pel.2012.0297
Zhang, Y., Muljadi, E., Kosterev, D., & Singh, M. (2015). Wind power plant model validation using synchrophasor measurements at the point of interconnection. IEEE Transactions on Sustainable Energy, 6(3), 984–992. https://doi.org/10.1109/TSTE.2014.2343794
Yang, L., Xu, Z., Ostergaard, J., Dong, Z. Y., & Wong, K. P. (2012). Advanced control strategy of DFIG wind turbines for power system fault ride through. IEEE Transactions on Power Systems, 27(2), 713–722. https://doi.org/10.1109/TPWRS.2011.2174387
Mohseni, M., Islam, S., & Masoum, M. A. S. (2011). Fault ride-through capability enhancement of doubly-fed induction wind generators. IET Renewable Power Generation, 5(5), 368–376. https://doi.org/10.1049/iet-rpg.2010.0154
Kazmierkowski, M. P., & Malesani, L. (1998). Current control techniques for three-phase voltage-source PWM converters: A survey. IEEE Transactions on Industrial Electronics, 45(5), 691–703. https://doi.org/10.1109/41.720325
Liang, J., Howard, D. F., Restrepo, J. A., & Harley, R. G. (2013). Feed-forward transient compensation control for DFIG wind turbines during both balanced and unbalanced grid disturbances. IEEE Transactions on Industry Applications, 49(3), 1452–1463. https://doi.org/10.1109/TIA.2013.2253439
Riouch, T., & El-Bachtiri, R. (2014). Comparative study of fuzzy logic controller and sliding mode for enhancing the behavior of the DFIG under fault. In International conference on multimedia computing and systems (pp. 1602–1607), Marrakech, Morocco. https://doi.org/10.1109/ICMCS.2014.6911241
Li, X. M., Su, K., Zhang, X. Y., Wu, Y. J., & Lin, Z. W. (2018). Approximate error considered fuzzy proportional–integral control of DFIG with regional pole placement for FRT improvement. IET Generation, Transmission & Distribution, 12(2), 335–346. https://doi.org/10.1049/iet-gtd.2016.1825
Calle-Prado, A., Alepuz, S., Bordonau, J., Nicolas-Apruzzese, J., Cortes, P., & Rodriguez, J. (2015). Model predictive current control of grid-connected neutral- point-clamped converters to meet low-voltage ride-through requirements. IEEE Transactions on Industrial Electronics, 62(3), 1503–1514. https://doi.org/10.1109/TIE.2014.2364459
Ellabban, O., Abu-Rub, H., & Bayhan, S. (2016). Sensorless model predictive control scheme of wind-driven doubly fed induction generator in dc microgrid. IET Renewable Power Generation., 10(4), 514–521. https://doi.org/10.1049/iet-rpg.2015.0347
Zhou, Z., Peng, H., Liu, B., Wang, W., Niu, G., & Liu, C. (2022). Power decoupling control of DFIG rotor-side PWM converter based on auto-disturbance rejection control. Wind Energy, 25(1), 94–106. https://doi.org/10.1002/we.2662
Sobhy, A., & Lei, D. (2021). Model-assisted active disturbance rejection controller for maximum efficiency schemes of DFIG-based wind turbines. International Transactions on Electrical Energy Systems, 31(11), 1–21. https://doi.org/10.1002/2050-7038.13107
Yang, C., Yang, X., & Shardt, Y. A. W. (2018). An ADRC-based control strategy for FRT improvement of wind power generation with a doubly-fed induction generator. Energies, 11(5), 1–19. https://doi.org/10.3390/en11051150
Beltran-Pulido, A., Cotres-Romero, J., & Coral-Enriquez, H. (2018). Robust active disturbance rejection control for LVRT capability enhancement of DFIG-based wind turbines. Control Engineering Practice, 77, 174–189. https://doi.org/10.1016/j.conengprac.2018.06.001
Zheng, W., Luo, Y., Chen, Y. Q., & Wang, X. (2021). Synthesis of fractional order robust controller based on Bode’s ideas. ISA Transactions, 111(6), 290–301. https://doi.org/10.1016/j.isatra.2020.11.019
Zaihidee, F. M., Mekhilef, S., & Mubin, M. (2019). Application of fractional order sliding mode control for speed control of permanent magnet synchronous motor. IEEE Access, 7, 101765–101774. https://doi.org/10.1109/ACCESS.2019.2931324
Ren, H. P., Wang, X., Fan, J. T., & Kaynak, O. (2019). Fractional order sliding mode control of a pneumatic position servo system. Journal of the Franklin Institute, 356(12), 6160–6174. https://doi.org/10.1016/j.jfranklin.2019.05.024
Gomaa Haroun, A., & Yin-Ya, L. (2019). A novel optimized fractional-order hybrid fuzzy intelligent PID controller for interconnected realistic power systems. Transactions of the Institute of Measurement and Control, 41(11), 3065–3080. https://doi.org/10.1177/0142331218820913
Li, H., Luo, Y., & Chen, Y. (2010). A fractional order proportional and derivative (FOPD) motion controller: tuning rule and experiments. IEEE Transactions on Control Systems Technology, 18(2), 516–520. https://doi.org/10.1109/TCST.2009.2019120
Gao, Z. (2015). Active disturbance rejection control for nonlinear fractional-order systems. International Journal of Robust and Nonlinear Control, 26(4), 876–892. https://doi.org/10.1002/rnc.3344
Kumar, P., & Chaudhary, S.K. (2017). Stability analysis and fractional order controller design for control system. International Journal of Applied Engineering Research, 12(20), 10298–10304. https://doi.org/10.13140/RG.2.2.36590.72004
Chen, P., Luo, Y., Zheng, W., Gao, Z., & Chen, Y. (2021). Fractional order active disturbance rejection control with the idea of cascaded fractional order integrator equivalence. ISA Transactions, 114(1), 359–369. https://doi.org/10.1016/j.isatra.2020.12.030
Trivedi, R., & Padhy, P. K. (2021). Design of indirect fractional order IMC controller for fractional order processes. IEEE Transactions on Circuits and Systems II: Express Briefs, 68(3), 968–972. https://doi.org/10.1109/TCSII.2020.3013404
Li, D., Ding, P., & Gao, Z. (2016). Fractional active disturbance rejection control. ISA Transactions, 62, 109–119. https://doi.org/10.1016/j.isatra.2016.01.022
Fang, H., Yuan, X., & Liu, P. (2019). Active–disturbance–rejection– control and fractional–order– proportional–integral–derivative hybrid control for hydroturbine speed governor system. Measurement and Control, 51(5–6), 192–201. https://doi.org/10.1177/0020294018778312
Li, B., & Zhu, L. (2021). A new active disturbance controller based on an improved fraction-order extended state observer. In 4th international conference on robotics, control and automation engineering (RCAE) (pp. 1–7), Wuhan, China. https://doi.org/10.1109/RCAE53607.2021.9638913
Zhang, Z., Yang, Z., Zhou, G., Liu, S., Zhou, D., Chen, S., & Zhang, X. (2021). Adaptive fuzzy active-disturbance rejection control-based reconfiguration controller design for aircraft anti-skid braking system. Actuators, 10(8), 1–21. https://doi.org/10.3390/act10080201
Luo, J., Wang, L., & Liu, B. (2021). Low-speed control of PMSM based on ADRC + FOPID. Systems Science & Control Engineering, 9(1), 73–87. https://doi.org/10.1080/21642583.2020.1863279
Liu, B., Hong, J., & Wang, L. (2019). Linear inverted pendulum control based on improved ADRC. Systems Science & Control Engineering, 7(3), 1–12. https://doi.org/10.1080/21642583.2019.1625081
Meng, Y., Liu, B., & Wang, L. (2019). Speed control of PMSM based on an optimized ADRC controller. Mathematical Problems in Engineering, 2019, 1–18. https://doi.org/10.1155/2019/1074702
Zhu, D., Zou, X., Deng, L., Huang, Q., Zhou, S., & Kang, Y. (2017). Inductance-emulating control for DFIG-based wind turbine to ride-through grid faults. IEEE Transactions on Power Electronics, 32(11), 8514–8525. https://doi.org/10.1109/TPEL.2016.2645791
Zhu, D., Zou, X., Zhou, S., Dong, W., Kang, Y., & Hu, J. (2018). Feedforward current references control for DFIG-based wind turbine to improve transient control performance during grid faults. IEEE Transactions on Energy Conversion, 33(2), 670–681. https://doi.org/10.1109/TEC.2017.2779864
Huang, Q., Zou, X., Zhu, D., & Kang, Y. (2016). Scaled current tracking control for doubly fed induction generator to ride-through serious grid faults. IEEE Transactions on Power Electronics, 31(3), 2150–2165. https://doi.org/10.1109/TPEL.2015.2429153
Jiang, F., Tu, C., Shuai, Z., Cheng, M., Lan, Z., & Xiao, F. (2016). Multilevel cascaded-type dynamic voltage restorer with fault current-limiting function. IEEE Transactions on Power Delivery, 31(3), 1261–1269. https://doi.org/10.1109/TPWRD.2015.2474703
Vrionis, T. D., Koutiva, X. I., & Vovos, N. A. (2014). A genetic algorithm-based low voltage ride-through control strategy for grid connected doubly fed induction wind generators. IEEE Transactions on Power Systems, 29(3), 1325–1334. https://doi.org/10.1109/TPWRS.2013.2290622
Ou, R., Xiao, X. Y., Zou, Z. C., Zhang, Y., & Wang, Y. H. (2016). Cooperative control of SFCL and reactive power for improving the transient voltage stability of grid-connected wind farm with DFIGs. IEEE Transactions on Applied Superconductivity, 26(7), 1–6. https://doi.org/10.1109/TASC.2016.2574344
Zou, Z. C., Xiao, X. Y., Liu, Y. F., Zhang, Y., & Wang, Y. H. (2016). Integrated protection of DFIG-based wind turbine with a resistive-type SFCL under symmetrical and asymmetrical faults. IEEE Transactions on Applied Superconductivity, 26(7), 1–5. https://doi.org/10.1109/TASC.2016.2574352
Wang, S., Chen, N., Yu, D., Foley, A., Zhu, L., Li, K., & Yu, J. (2015). Flexible fault ride through strategy for wind farm clusters in power systems with high wind power penetration. Energy Conversion and Management, 93, 239–248. https://doi.org/10.1016/j.enconman.2015.01.022
Kasem, A. H., El-Saadany, E. F., El-Tamaly, H. H., & Wahab, M. A. A. (2008). An improved fault ride-through strategy for doubly fed induction generator-based wind turbines. IET Renewable Power Generation, 2(4), 201–214. https://doi.org/10.1049/iet-rpg:20070092
Campos-Gaona, D., Moreno-Goytia, E. L., & Anaya-Lara, O. (2013). Fault ride-through improvement of DFIG-WT by integrating a two-degrees-of-freedom internal model control. IEEE Transactions on Industrial Electronics, 60(3), 1133–1145. https://doi.org/10.1109/TIE.2012.2216234
Hossain, M. J., Saha, T. K., Mithulananthan, N., & Pota, H. R. (2013). Control strategies for augmenting LVRT capability of DFIGs in interconnected power systems. IEEE Transactions on Industrial Electronics, 60(6), 2510–2522. https://doi.org/10.1109/TIE.2012.2228141
Hu, J., Xu, H., & He, Y. (2013). Coordinated control of DFIG’s RSC and GSC under generalized unbalanced and distorted grid voltage conditions. IEEE Transactions on Industrial Electronics, 60(7), 2808–2819. https://doi.org/10.1109/TIE.2012.2217718
Lin, F. J., Huang, Y. S., Tan, K. H., Lu, Z. H., & Chang, Y. R. (2013). Intelligent-controlled doubly fed induction generator system using PFNN. Neural Computing and Applications, 22, 1695–1712. https://doi.org/10.1007/s00521-012-0965-7
Laghridat, H., Essadki, A., Annoukoubi, M., & Nasser, T. (2020). A novel adaptive active disturbance rejection control strategy to improve the stability and robustness for a wind turbine using a doubly fed induction generator. Journal of Electrical and Computer Engineering, 8, 1–14. https://doi.org/10.1155/2020/9847628
Girsang, I. P., Dhupia, J. S., Muljadi, E., Singh, M., & Pao, L. Y. (2014). Gearbox and drivetrain models to study dynamic effects of modern wind turbines. IEEE Transactions on Industry Applications, 50(6), 3777–3786. https://doi.org/10.1109/TIA.2014.2321029
Boukhriss, A., Essadki, A., Bouallouch, A., & Nasser, T. (2014). Maximization of generated power from wind energy conversion systems using a doubly fed induction generator with active disturbance rejection control. In Second world conference on complex systems (pp. 330–335), Agadir, Morocco. https://doi.org/10.1109/ICoCS.2014.7060907
Boukhriss, A., Nasser, T., & Essadki, A. (2013). A linear active disturbance rejection control applied for DFIG based wind energy conversion system. International Journal of Computer Science Issues, 10(2), 391–399.
Han, J. (2009). From PID to auto disturbance rejection control. IEEE Transactions on Industrial Electronics, 56(3), 900–906. https://doi.org/10.1109/TIE.2008.2011621
Guo, B. Z., & Zhao, Z. L. (2016). Active disturbance rejection control for nonlinear systems: An introduction. John Wiley & Sons. https://doi.org/10.1002/9781119239932
Petras, I. (2011). Fractional-order nonlinear systems: Modeling. Springer. https://doi.org/10.1007/978-3-642-18101-6_4
Peng, N., Bai, Y., Luo, H., & Bai, J. (2013). Artillery position control through auto disturbance rejection controller based-on fuzzy control. In 5th international conference on intelligent human-machine systems and cybernetics (pp. 496–499), Hangzhou, China. https://doi.org/10.1109/IHMSC.2013.124
Abad, G., Lopez, J., Rodriguez, M. A., Marroyo, L., & Iwanski, G. (2011). Doubly fed induction machine: Modeling and control for wind energy generation. Wiley-IEEE Press. https://doi.org/10.1002/9781118104965
Abu-Rub, H., Malinowski, M., & Al-Haddad, K. (2014). Power electronics for renewable energy systems, transportation and industrial applications. John Wiley & Sons. https://doi.org/10.1002/9781118755525
Abad, G. (2017). Power electronics and electric drives for traction applications. John Wiley & Sons. https://doi.org/10.1002/9781118954454
Wessels, C., & Fuchs, F.W. (2010). Fault ride through of DFIG wind turbines during symmetrical voltage dip with crowbar or stator current feedback solution. In IEEE energy conversion congress and exposition (pp. 2771–2777), Atlanta, GA, USA. https://doi.org/10.1109/ECCE.2010.5618076
Song, J., Gao, K., Wang, L., & Yang, E. (2016). Comparison of linear and nonlinear active disturbance rejection control method for hypersonic vehicle. In 35th Chinese control conference (pp. 10759–10764), Chengdu, China. https://doi.org/10.1109/ChiCC.2016.7555064
Acknowledgements
Not applicable.
Funding
The authors declare that the research is not funded by any Government/Private institution/agency.
Author information
Authors and Affiliations
Contributions
SRM: data curation, conceptualization, methodology, software, investigation, writing—original draft preparation; SHS: supervision, validation, review and editing the manuscript; HM: supervision, validation, review and editing the manuscript. All authors read and approved the final manuscript.
Corresponding author
Ethics declarations
Competing interests
The authors declare that they have no known competing financial interests or personal relationships that could have appeared to influence the work reported in this paper.
Rights and permissions
Open Access This article is licensed under a Creative Commons Attribution 4.0 International License, which permits use, sharing, adaptation, distribution and reproduction in any medium or format, as long as you give appropriate credit to the original author(s) and the source, provide a link to the Creative Commons licence, and indicate if changes were made. The images or other third party material in this article are included in the article's Creative Commons licence, unless indicated otherwise in a credit line to the material. If material is not included in the article's Creative Commons licence and your intended use is not permitted by statutory regulation or exceeds the permitted use, you will need to obtain permission directly from the copyright holder. To view a copy of this licence, visit http://creativecommons.org/licenses/by/4.0/.
About this article

Cite this article
Mosayyebi, S.R., Shahalami, S.H. & Mojallali, H. Fault ride-through capability improvement in a DFIG-based wind turbine using modified ADRC. Prot Control Mod Power Syst 7, 50 (2022). https://doi.org/10.1186/s41601-022-00272-9
Received:
Accepted:
Published:
DOI: https://doi.org/10.1186/s41601-022-00272-9